Изобретение относится к машииостпоА- нию и может использоваться в трансмиссиях транспортных средств.
Цель изобретения - упрощение геоме-- рии зацепления и повышение надежности дифференциала.
На фиг. показан самоблокирующийся дифференциал транспортного средства про дольный разрез; на фиг. 2 самоблокипую- щиися дифференциал, сечение .А-А на фи 1- на фиг. 3 - дополнительное зубчатое колесо поперечное сечение; на фиг. 4 - полуосевая шестерня, поперечное сечение; на фиг 5 - - сателлит, поперечное сечение; на фиг 6 - график приложения нагрузок и моментов к диаметрально расположенным сртеличтач дифференциала в плоскости их вращения- на фиг. 7 - схема приложения сил - ,;омен тов к сатачлиту в плоскости его враи,гния сведенных в одну плоскость.
Са.моблокирующийся дифференикал транспортного средства содержит сферически.й корпус I, состоящий из двух половим (d№r 1 и 2), установленные в нем соосно по.луо.евые щестерни 2 (фиг. 4), находящиеся в зацеплении с сателлитами 3 и 4 (фиг. 5) кинематически связанными с возможностью враще- ния с водилом, закрепленным в корпусе J Водило представляет собой два дои олни- тельных зубчатых колеса 5 и 6 ( 3 каждое из которых установлено с вг. ностью вращения ня ос.ч 7. закреи -.нчой в корпусе 1 при помощи н.ггифтов 8 дополнительное зубчатое колесо 5 и 6 navo- дится в зацеплении с двумя диа:ие-:-пя расположенными сателлитами 3 -. 4 :-г.-,ет рические оси сателлитс в 3 и 4 совмец ены Продольные оси каждого доп мцмте п- чо- го зубчатого колеса 5 и 6 расьоложень в плоскости, совмещенной с осью враьчения полуосевых нлестерен 2 и ггересекающейся с геометрической осью сат&ллитоз 3 и 4 под прямым углом в центре диффере/щиала Продольная ось каждого дополнительного зубчатого колеса 5 и 6 расположена под т- лом а к оси вращения полуосевых шестерен 2- Дополните -шные зубчатые колеса о ч б расположены по обе стороны плоскости гчиь мещенной с осью вращения полуосевых irrc- терен и геометрической осью сател ч тор 3 и 4, и каждое находится в зацеплении с двумя диаметрально расположенными сат- - итами 3 и 4.- - Торец дополнительного зубчатого соле- а b и D (фиг. 3). торец полуосевой и 2 (фиг. 4), торец сателлита 3 и 4 (юиг 5) асположенные со стороны корпуса вы олнепы сферическими с радиус ом / асположенным в центре дифференциала и, соответствуют сферической поверулост i орпуса 1 дифференциала и нахоаятси с ней контакте.
В варианте выполнения каждое дополительное зубчатое колесо 5 и 6 установлено а отдельной оси, закреплепной в корпусе
50
-
10
15
20
25
30
40
0
В вариа-нте выполнения диаметрально расположенные сателлиты 3 и 4 установлены ;;;; || «зюЩРЙ оси с возможностью враНа втором торце каждого дополнительного зубчатого колеса 5 и 6 (фиг 3) со сто РОНЫ центра дифференциала выполнена кольцевая выемка 9.
г -Jtn r торец дополни- т.1ьного зубчатого колеса 5 и 6. расположенный со стороны центра корпуса дифференциала, представляет собой сферу 10 с р иа ла. Р ™- ° «ь,м в центре диффеВ дифференциале (фиг. I) проекция полюса зацепления зубьев дополните1ьных зубчатых колес о и 6 с сателлитами 3 и 4 на плоскость, совмещенную с осью вращения полуосевых нк-стерен 2 н геометрической о.ью сателлитов 3 и 4, удалены от центра дифференциала на расстояние, меньшее расстояния полюса зацепления зубьев гюлу- осевых П1естерен 2 с сатаалитами 3 и 4 от нептра дифференциала в нлоекости совмещенной с осью вращения полуосевых щес- терен 2 и сателлитов 3 и 4.
В варианте выполнения дифференциала проекции полюсов зацепления зубьев допол- нитель ых зубчатых колес 5 и 6 с сателли- 1 ами d и 4 удалены от центра диффеоенциала на расстояние а, равное или больщее рас- сгокния .) положения полюсов зацепления зубьев нолуосевых шестерен 2 с сате.пг,ита- ми 3 и 4 в плоскости, совмещенной с осью вращения полуосевых н естерен и геометрической осью сателлитов 3 и 4.
.Цополнительпые зубчатые колеса 5 и 6 ззкренленные в корпусе 1, исключают про- скал.зывания между ними сателлитов 3 и 4.
При вращении дифференциала усилие от .-рансмиссии может передаваться от каждого дополнительного зубчатого колеса 5 или Ь к каждому сателлиту 3 или 4 только в одном полюсе зацепления. Причем эти полюса зацепления двух сателлитов 3 и 4 t двумя дополнительными зубчатыми колесами о и 6 расположены на диаметрально прогмвоположргых сторонах и равноудалены 01 центра дифференциала.
На фиг. 6 показана пространственная схема сил и моментов, действующих на са- .ел.жты 3 и 4 в плоскости их вращения На схеме показаны:
РО .члы, приложенные к сатеа- литам 3 и 4 в полюсах зацепления зубьев от дополнительных зубчатых колес 5 и 6;- силы, приложенные к сател- лита.м 3 и 4 в полюсах зацепления зубьев от полуосевых шестерен 2;
момент, приложенный к сателлиту 3 в плоскости его вращения от лейстпия run D „
и fi -М,,
ния от действия сил р о и ,
причем , где Мп- момент от силы Ро, - момент от силы Л( ; Мс4 - момент, приложенный к сататлиту 4 в плоскости его враще- ния от действия сил Рд- и Р, причем . На фиг. 7 приведена обобщенная схема действия сил и моментов на сателлиты 3 или 4 в плоскости их вращения. Показано приложение сил и , расположенных на расстоянии d друг от друга и равноудаленных от геометрической оси сателлита, силы Р и расположены на расстоянии D друг от друга и равноудалены от геометрической оси сателлита 3 и 4. Силы РО Р действуют в одной плоскости и направлены в разные стороны. Расстояние между точками, приложения сил - величина постоянная, причем общая сила , а Р -fft и Соотношение сил и при работе дифференциала может меняться.
Самоблокирующийся дифференциал транспортного средства работает следующим образом.
При движении транспортного средства, когда условия сцепления обоих ведущих колес с дорогой одинаковы, т. е. , крутящий момент трансмиссии передается через корпус 1, ось 4, каждое дополнительное зубчатое колесо 5 и 6 к каждому сателлиту 3 и 4 и далее через полуосевые щестерни 2 на по- луоси ведущих колес.
Крутящий момент трансмиссии приложен к сателлиту 3 через дополнительное зубчатое колесо 5 в полюсе зацепления их зубьев со смещением, равным d/2 от геометрической оси сателлита 3 в сторону одной из полуосе- вых щестерен 2.
Одновременно крутящий момент трансмиссии приложен к диаметрально расположенному сателлиту 4 через дополнительное зубчатое колесо 6 в полюсе зацепления их зубьев со смещением, равным rf/2 от геометрической оси сателлита 4 в сторону другой полуосевой шестерни 2 (фиг. 1 и 6).
От действия момента трансмиссии М в полюсах зацепления зубьев сателлитов 3 и 4 с дополнитапьны.ми зубчатыми колеса- ми 5 и 6 действуют силы Р и Р, направленные в сторону вращения корпуса 1 дифференциала.
Одновременно в полюсах зацепления зубьев сателлитов 3, 4 с полуосевыми щес- тернями 2 действуют силы сопротивления качению Р и Р на расстоянии D/2 от геометрической оси сателлитов, направленные в обратную сторону по отношению действия сил РО- Из условий равновесия всегда РО. От действия сил РО и на сателлитах 3 и 4 в плоскости их вращения возникает кру- тящий момент Мсз и Мс.
Поскольку условие сцепления колес с дорогой одинаковое , то силы, действуюс ил Pf,
щие в полюсах зацепления сателлитов 3 и 4 с полуосевыми шестернями 2 и дополнительными зубчатыми колесами 5 и б, одинаковы .и равны между собой, т. е. , а . От действия сил Р и , приложенных к сателлиту 3,на нем возникает крутящий момент /И,(1-.-W/i, стремящийся вращать сателлит 3 (фиг. 6).
Одновременно на сателлите 4 от действия и й возникает крутящий момент М.с,.
Таким образом, одинаковые силы РО и действуюп ие на равных расстояниях от оси вращения сателлитов 3 и 4 D/2 и d/1, создают одинаковые по абсолютной величине и одинаково направленные моменты -М,.- -Mf4. Эти одинаковые моменты замыкаются на полуосевых шестернях 2 на диаметрально противоположных сторонах каждой полуосевой шестерни 2 и направлены в одну сторону, что пр.чводит к их взаимному уравновешиванию. Система находится в равновесии. Дифференциал работает как жесткая система. Транспортное средство совершает движение.
Пространственную схему действия сил и моментов в плоскости вращения сате, 1ли- тов (фиг. 6) можно заменить эквивалентной схемой сил и моментов, действующих на один сателлит (фиг. 7).
В этой схеме силы и и силы Р и приложены к одному сателлиту па диаметрально расположенных точках.
Линейное расстояние между силами и Рд равно d, ;i между силами § и равно Д На фиг. 7 расстояние d меньше расстояния D. В варианте выполнения дифференциала расстояние О выполнено меньшим расстояния d. При изменении дорожных условий движения транспортного средства,когда коэффициенты сцепления ведущих колес с дорогой не одинаковы, т. е. , изменяется соотношение сил , действуюц их в полюсах зацепления зубьев: сателлиты 3 и 4 - полуосевые шестерни 2, что приводит к изменению соотношения сил /J // , приложеннькх в полюсах зацепления зубьев: сателлиты 3 и 4 - дополнительные зубчатые колеса 5 и 6. Изменение соотношения сил РО и приводит к изменению величин моментов М,. действуюших в плоскости вращения сателлитов 3 и 4.
До определенного сс)отно1пеиия сил / дифференциал находится в блокирующем состоянии. Относительного вращения сателлитов 3 и 4 не происходит.
Степень блокировки дифференциала характеризуется соотношением линейных pa:v меров D + 0/D -О и должна быть больше или равна соотношению . т. е. Л-|-()х (D )/
Если величина соотношения линейных величин: суммы и.разности диаметров D и d равна или больше соотношения сил и f, моменты на сател.иллх 3 и 4 и .V/,.,
всегда равны по абсолютной Е0,личи1 е. на правлены в одну CTOpOiiV и замьпокпс;- па полуосевых шестернях 2. Относите.1ьное вращение саге плитов 3 и 4 полуосевих luec- терен 2 и дополнительных зубчатых колес 5 и 6 не происходит. Дифферен11,иал рабо-. как жесткая система. ПробуксоЕЖИ ко, ;сч: не происходит. Транспортное средство сг вершает прямолиной.чОс: ,
При изменении коэффициенто : сцст/ле- ния колес с дорогой зти циклы повторя-отся. - При наезде на препятствие и происходит дифференциальное действие механизма. Происходит О1носительное nej)e:v;e;u.t- ние сателлитов 3, 4., полуосевых iiiecTCpeii 2, дополнительных зубчатых колес 5, 6.
В варианте выпол.нения диффере1-;и;а. ;а. S котором линейное расстояние / и;;кду силами РО больше линейного расстс к;.-:я /. между силами / , соотношение сил ij4 f; при любых изменениях коэффицкечт(.Ч1 сцепления колес с дорогой никогда не бу.а -т бо. ше соотношения линейных размеров D-r-a/ /D - d, т. е. пробуксовка колес не будгг
ПрОИСХОДИТЬ при любых ус. ЮВИЯХ CUC i;;t4;;iK
ведуш;их колес транспортного средства с дорогой.
CooTHOHjeHHe сил 1 можно заменить
соотнои.ением коэффициентов сцепления колес с дорогой / , и /а, т. е. ..
Формула изобретения
Самоблокирующийся дифференциал тран- ciiopTHoro средства, содержащий корпус. установленные в корпусе полуосевые шестерни, находящиеся в зацеплении с сател- лита.мч, связанньшн с корпусом через води.ю, выиолпенное из находящихся в зацеплении с сателлитам дополнита ьных зубчатых к. лчес, установленных с возможностью вра- П1е11ия на осях, закрепленных в корпусе, о : личающийся тем, что, с целью упрощения гео.метрии зацепления и повышения надеж- нос . и дифференциала, каждый сателлит введен н зацепление с обеими полуосевыми и естернямм и связан с двумя соосными дополнительными колесами, ось которых расположена под углом к оси вращения полуосев ьестере и с пересечением последней.

| название | год | авторы | номер документа |
|---|---|---|---|
| Самоблокирующийся дифференциал транспортного средства | 1988 |
|
SU1585179A1 |
| Самоблокирующийся дифференциал транспортного средства | 1989 |
|
SU1696327A1 |
| Самоблокирующийся дифференциал транспортного средства | 1989 |
|
SU1691158A1 |
| Самоблокирующийся дифференциал транспортного средства | 1989 |
|
SU1676850A1 |
| Самоблокирующийся дифференциал транспортного средства | 1987 |
|
SU1428604A1 |
| Самоблокирующийся дифференциал транспортного средства | 1987 |
|
SU1495151A1 |
| Самоблокирующийся дифференциал транспортного средства | 1988 |
|
SU1581611A1 |
| Дифференциал транспортного средства | 1990 |
|
SU1763255A1 |
| Самоблокирующийся дифференциал транспортного средства | 1988 |
|
SU1532339A1 |
| Самоблокирующийся дифференциал транспортного средства | 1989 |
|
SU1687471A1 |


Изобретение относится к машиностроению и может использоваться в трансмиссиях транспортных средств. Целью изобретения является упрощение геометрии зацепления и повышение надежности дифференциала. Для этого в дифференциале, содержащем установленные в корпусе 1 полуосевые шестерни 2, сателлиты и установленные на оси 7 дополнительные зубчатые колеса 5, 6, каждый сателлит находится в зацеплении с обеими полуосевыми шестернями 2 и связан с двумя соосными дополнительными колесами. Ось этих колес пересекается с осью вращения полуосевых шестерен 2 и расположена к ней под углом. 7 ил.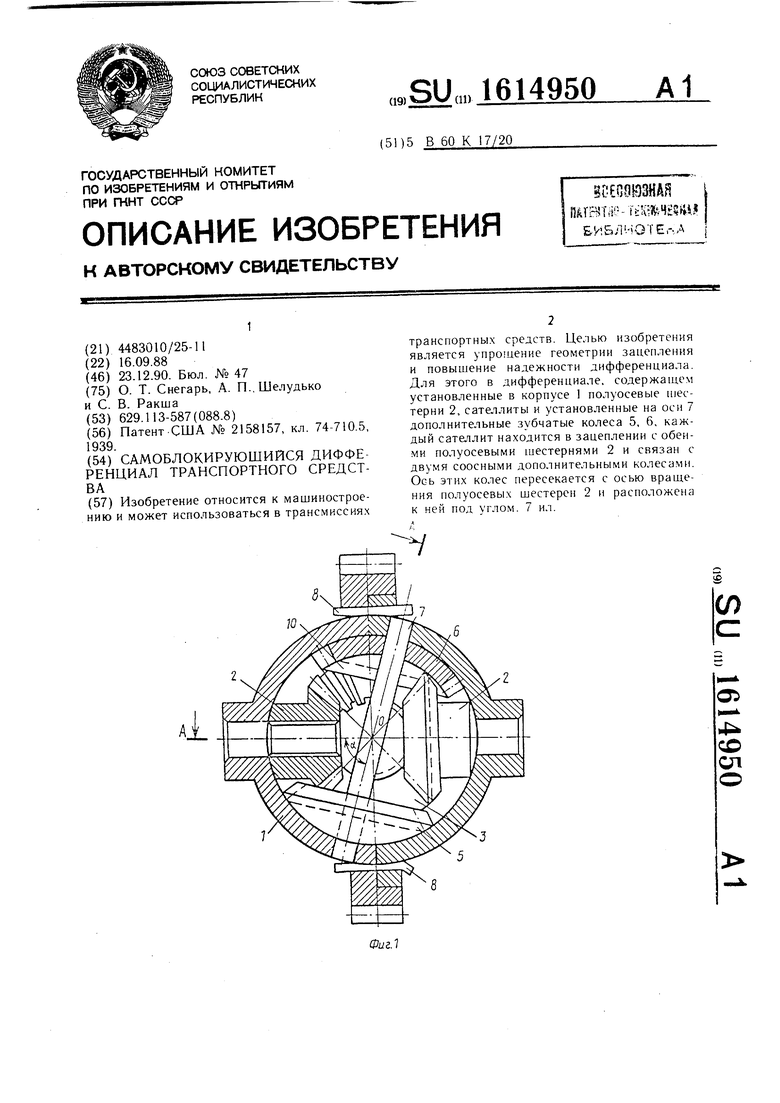
ч
Фиг.
а/2
Фиг. 5
/
Фаг. 6
Р„ )
р;
Фиг. 7
.
W
А
;
| ТРЕНАЖЕР "РУБЧЕНКО" | 1999 |
|
RU2158157C1 |
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
