Изобретение относится к машиностроению и может быть использовано в электрогидроприводах сельхозмашин строительно-дорожных машин станках, например, листогибочных машинах.
Известны электрогидравлические приводы с системой управления, источниками давления, гидроаппаратурой и двумя гидромашинами одинакового рабочего объема с кинематически связанными роторами. С целью синхронизации движения двух цилиндров, масло в каждой из них поступает через одну из гидромашин, причем при наличии ошибки деления потока датчики перемещения гидроцилиндров выдают в систему управления сигнал на коммутацию гидрораспределителей, обеспечивающих перекрестное подключение гидромашин к цилиндрам.
Недостатками привода являются конструктивная сложность и пониженная надежность в связи со значительными ошибками синхронизации.
Известен также электрогидравлический привод, содержащий гидросистему перемещения рабочего органа, включающую кинематически соединенные с последним гидроцилиндры, гидроусилители и насос, последовательно сообщенные между собой и систему управления состоящую из блока управления подключенных к ним исполнительных механизмов, установленных на гидроусилителях.
Система аналогового управления обладает пониженной надежностью из-за наличия дрейфов сигналов управления и ненадежности электрических датчиков обратной связи, расположенных вблизи от рабочей зоны машины. Кроме того, при наличии повышенной нагрузки в одном из цилиндров увеличивается давление во всей гидросистеме (через систему элементов ИЛИ, соединяющих камеру управления предохранительного клапана с наиболее нагруженным цилиндром), что приводит к повышенным энергетическим потерям в электрогидравлическом приводе.
Предложенное техническое решение направлено на повышение надежности и снижение энергетических потерь.
Указанный технический результат достигается тем, что электрогидравлический привод содержит гидросистему перемещения рабочего органа, включающую кинематически соединенные с последним гидроцилиндры, гидроусилители и насос, последовательно сообщенные между собой и систему управления, состоящую из блока управления и подключенных к ним исполнительных механизмов, установленных на гидроусилителях.
При этом сопоставительный анализ предлагаемого решения с прототипом показывает, что электрогидравлический привод отличается от известного тем, что рабочий орган выполнен в виде двух гибочных и двух ведущих валков, а привод снабжен дополнительной гидросистемой вращения ведущих валков, включающей гидромоторы различного рабочего объема, соединенные с валками и сообщенные линиями с трехпозиционным распределителем, запирающим в средней позиции линии подключения гидромоторов и соединяющим при этом сливную и напорную линии, в последней из которых установлен с задающим шаговым двигателем трехлинейный регулятор расхода, вход которого подключен к нерегулируемому насосу, а насос гидросистемы перемещения валков выполнен регулируемым по давлению, блок управления выполнен в виде двух программируемых контроллеров с токозадающими резисторами, а исполнительные механизмы - в виде задающих шаговых двигателей, связанных суммирующими механизмами с гидроусилителями, причем силовые выходы первого контроллера через токозадающие резисторы соединены с фазовыми обмотками пары шаговых двигателей управления гидроусилителями гидроцилиндров одного гибочного валка, а силовые выходы второго-другого гибочного валка и шагового двигателя трехлинейного регулятора расхода, при этом соединение гибочных валков с гидроусилителями выполнено в виде поворотных рычагов, на одном конце каждого из которых установлены зубчатые секторы, взаимодействующие с шестернями кинематически связанными с гидроусилителями, причем последние и зубчатые секторы снабжены устройствами контроля положения.
Таким образом, предлагаемое устройство соответствует критерию "Новизна".
А благодаря наличию указанных отличительных признаков повышается надежность и снижаются энергетические потери привода.
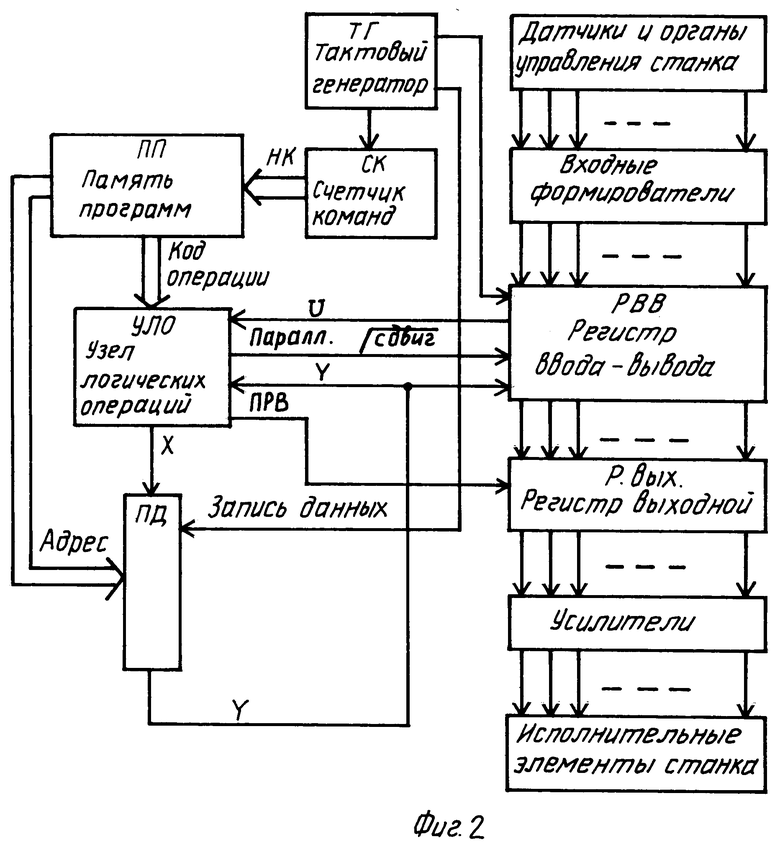
На фиг. 1 изображена принципиальная схема электрогидравлического привода, например, четырехвалковой листогибочной машины; на фиг. 2 - упрощенная структурная схема блока управления "Цикл-1", где НК - номер команды, ПРВ - сигнал "Переключение выходов", ПД - память данных (одноразрядная), U - входная информация в последовательном коде, Х - данные, записываемые в ПД, Y - данные, считываемые из ПД, Электрогидравлический привод, например, четырехвалковой листогибочной машины содержит систему управления, выполненную в виде двух программируемых контроллеров 1 и 2, например, типа "Цикл-1" (Упрощенная структурная схема блока которого показана на фиг. 2) управляющих шаговыми двигателями 3-7, (например, типа ДШИ-200-3) причем силовые выходы 8 первого контроллера 1 через токозадающие резисторы 9 соединены с фазовыми обмотками пары шаговых двигателей 3 и 4 управления гидроусилителями 10 и 11 гидроцилиндров 12 и 13 одного гибочного валка 14, а силовые выходы второго контроллера 2 соединены с фазовыми обмотками пары шаговых двигателей 5, 6 гидроусилителей гидроцилиндров другого гибочного валка 15 и шаговым двигателем 7 регулирования гидросистемы вращения ведущих валков 16, 17. Источник 18 давления снабжен двумя независимыми насосами 19, 20 гидросистем перемещения и вращения валков, причем первый из указанных насосов 19 выполнен регулируемым по давлению, а второй - нерегулируемым.
Опорные подшипники (один из них 21) гибочных валков 14, 15 эксцентрично установлены на поворотных рычагах (один из них 22), соединенных с шарнирно закрепленными гидроцилиндрами 12, 13. Рычаги 22 снабжены зубчатыми секторами (один из них 23), зацепляющимися с шестернями 24, которые связаны с соответствующими шаговыми двигателями 3-6 через суммирующий механизм (например, винтовую пару) 25, одно из звеньев которого (например, винт) взаимодействует с гидроусилителем 10 (например, четырехкромочным золотником). Насос 20 гидросистемы вращения валков соединен с гидромоторами 26, 27 различного рабочего объема привода ведущих валков 16, 17 через трехлинейный регулятор расхода 28 с задающим шаговым двигателем 7 и трехпозиционный распределитель 29, соединяющий в средней позиции напорную 30 и сливную 31 линии и запирающий линии 32 и 33 подключения гидромоторов 26 и 27. Гидроусилители 10, 11 и зубчатые секторы 23 рычагов 22 снабжены устройствами контроля положения (например, микровыключателями) 34, 35. В гидросистемах предусмотрены также фильтры 36 и 37, обратные клапаны 38, 39, предохранительный клапан 40, гидрораспределитель 41 управления гидроцилиндрами 42 подъема ведущего валка 17, гидрораспределитель 43 управления гидроцилиндром 44 привода откидной опоры (не показана), подпорный клапан 45. На фиг. 1 обозначены: М - приводные электродвигатели.
Работает электрогидравлический привод следующим образом.
При включении источника давления 18 насос 20 через фильтр 36, обратный клапан 38, регулятор расхода 28 и распределитель 29 качает масло в бак под минимальным давлением (давление разгрузки регулятора 28 и давление открытия подпорного клапана 45), а насос 19 устанавливается в положение нулевого эксцентриситета, при котором в напорной линии развивается давление, определяемое настройкой регулятора насоса, а подача практически равна нулю (величина утечек в гидросистеме). В соответствии с заданной программой с силовых выходов 8 программируемого контроллера 1 через токозадающие резисторы 9 на фазовые обмотки шагового двигателя 3 поступает последовательность импульсов, коммутируемых таким образом, что вал шагового двигателя поворачивается на определенный угол. Через суммирующий механизм 25 золотник гидроусилители 10 смещается в осевом направлении, в результате чего поток масла поступает в гидроцилиндр 12, заставляя перемещаться его поршень вместе с рычагом 22 и гибочным валком 14. Поворот рычага 22 через зубчатый сектор 23 вызывает вращение шестерни 24 и через суммирующий механизм - смещение золотника гидроусилителя 10 в направлении к нейтральному положению, после чего гидроцилиндр 12 останавливается. Таким образом, каждому угловому положению шагового двигателя соответствует строго определенное положение гидроцилиндра 12 и, следовательно - высота подъема гибочного валка 14. Привода перемещения остальных опор гибочных валков 14 и 15 с управляющем от шаговых двигателей 4-6 работают аналогично.
Перед началом работы листогибочной машины гибочные валки 14, 15 находятся в нижнем положении, при котором зубчатые секторы 23 воздействуют на микровыключатели 35. Для поиска исходного положения на шаговые двигатели 3-6 подается последовательность импульсов, соответствующая движению гибочных валков 14, 15 вверх на расстояние, достаточное для размыкания всех микровыключателей 35, после чего движение реверсируется, опоры 21 валков медленно опускаются, и при срабатывании каждого из микровыключателей 35 производится обнуление системы управления соответствующим шаговым двигателем. Далее на пары шаговых двигателей 3 и 4 валка 14 (или 5, 6 валка 15) от одного и того же программируемого контроллера синхронно подаются одинаковые количества импульсов, благодаря чему обеспечивается строго синхронное перемещение пар гидроцилиндров (например, 12 и 13). Система имеет индикацию количества импульсов, поступивших на каждый из шаговых двигателей, а также возможность независимого поворота одного из шаговых двигателей, что позволяет устанавливать определенный перекос валка (необходим для гибки конических обечаек) и дальнейшее синхронное движение опор.
В процессе гибки гидроцилиндры 42, управляемые гидрораспределителем 41, прижимают нижний ведущий валок 17 к верхнему 16 через листовую заготовку, а гидромоторы 26 и 27 обеспечивают вращение валков 16, 17 после включения одного из электромагнитов распределителя 29, причем трехлинейный регулятор расхода 28 изменяет давление в напорной линии в соответствии с нагрузкой, действующей на гидромоторы 26 и 27, а также обеспечивает защиту гидросистемы от перегрузки. Частота вращения ведущих валков 16 и 17 определяется программой, заложенной в программируемый контроллер 2, к силовым выходам которого через токозадающие резисторы подключен шаговый двигатель 7, изменяющий проходное сечение дросселирующей щели трехлинейного регулятора расхода 28.
После окончания гибки цилиндром 44, управляемым от гидрораспределителя 43, реализуется перемещение откидной опоры. Предохранительный клапан 40 обеспечивает защиту насоса 19 от перегрузки и исключение пиков давления в переходных режимах.
Микровыключатели 34 служат для исключения опасности потери информации при перегрузке. Если оператор включает подъем валков в условиях, когда тягового усилия машины недостаточно, накапливающееся рассогласование на суммирующем механизме 25 вызывает увеличенное осевое смещение золотника гидрораспределителя 10 и срабатывание одного из микровыключателей 34, запрещающих дальнейшее поступление импульсов, соответствующих данному направлению движения, в фазовые обмотки шагового двигателя 3.
Применение сквозного цифрового способа управления без электрической обратной связи с подключением пар шаговых двигателей к общему программируемому контроллеру и наличие необходимых блокировок обеспечивают высокую надежность работы привода, а разделение гидросистем перемещения и вращения валков с использованием регулируемого насоса 19 и регулятора 28, реализующего адаптацию по давлению, - снижение энергетических потерь. (56) Патент Австрии N 385466, кл. В 30 В 15/24, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИСТОГИБОЧНАЯ ЧЕТЫРЕХВАЛКОВАЯ МАШИНА | 1992 |
|
RU2011454C1 |
| ГИДРОСИСТЕМА СИНХРОНИЗАЦИИ ДВУХ СЕРВОМЕХАНИЗМОВ | 2000 |
|
RU2192567C2 |
| ГИДРОПРИВОД ПЕРЕМЕЩЕНИЯ НИЖНЕГО ВАЛКА ЧЕТЫРЕХВАЛКОВОЙ ЛИСТОГИБОЧНОЙ МАШИНЫ | 2001 |
|
RU2201307C2 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ПОЛОТНА ДОРОГИ | 1998 |
|
RU2149237C1 |
| ГИДРОПРИВОД МЕХАНИЗМА СРЕЗАНИЯ ЛЕСОЗАГОТОВИТЕЛЬНОЙ МАШИНЫ | 1991 |
|
RU2014529C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО ПРОКАТА В ЗОНУ ОБРАБОТКИ | 1994 |
|
RU2104115C1 |
| АЭРОДРОМНЫЙ ГИДРОАГРЕГАТ ДЛЯ ОБСЛУЖИВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2067953C1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| МОНТАЖНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ КОНТАКТНОЙ СЕТИ | 1995 |
|
RU2091293C1 |
| Блок комбинированных рулевых приводов системы управления летательного аппарата | 1981 |
|
SU1839883A1 |
Использование: в металлургическом машиностроении. Сущность: электрогидравлический привод содержит гидросистему перемещения рабочего органа 14, 16, гидросистему вращения ведущих валков 15, 17 и блок управления, выполненный в виде двух программируемых контроллеров 1 и 2 с токозадающими резисторами 9, управляющих шаговыми двигателями 3 - 7 гидроусилителей 10, 11 и трехлинейного регулятора расхода 28, при этом гибочные валки 14, 16 установлены на поворотных рычагах 22, связанных с гидроцилиндрами 12 и имеющих зубчатые секторы 23, взаимодействующие с шестернями 24 кинематически связанными с гидроусилителями 10, 11. 2 ил.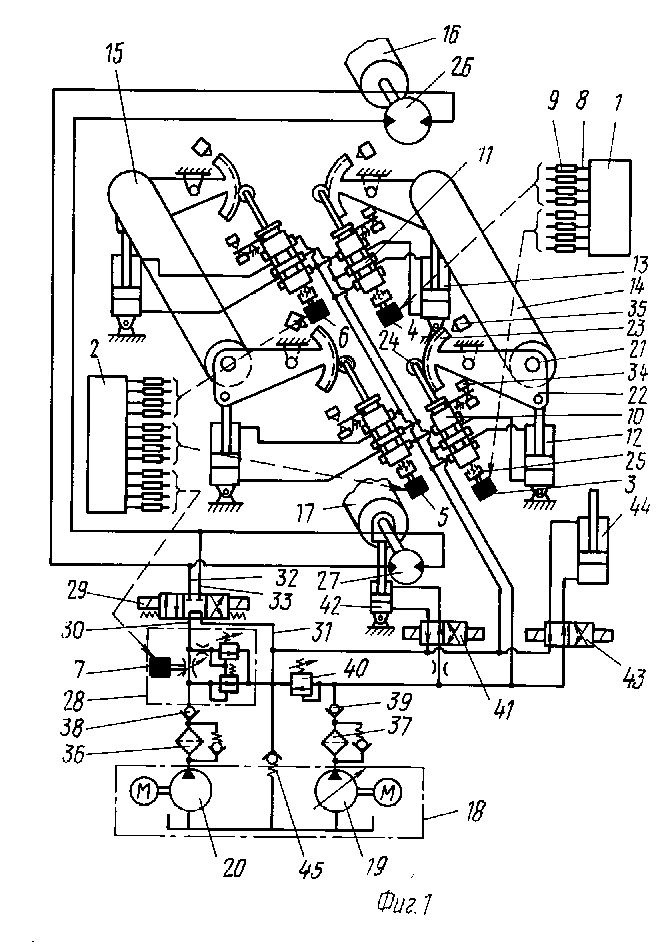
ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД, содержащий гидросистему перемещения рабочего органа, включающую кинематически соединенные с последним гидроцилиндры, гидроусилители и насос, последовательно сообщенные между собой, и систему управления, состоящую из блока управления и подключенных к нему исполнительных механизмов, установленных на гидроусилителях, отличающийся тем, что рабочий орган выполнен в виде двух гибочных и двух ведущих валков, а привод снабжен дополнительной гидросистемой вращения ведущих валков, включающей гидромоторы различного рабочего объема, соединенные с валками и сообщенные линиями с трехпозиционным распределителем, запирающим в средней позиции линии подключения гидромоторов и соединяющим при этом сливную и напорную линии, в последней из которых установлен снабженный шаговым двигателем трехлинейный регулятор расхода, вход которого подключен к нерегулируемому насосу, а насос гидросистемы перемещения валков выполнен регулируемым по давлению, блок управления выполнен в виде двух программируемых контроллеров с токозадающими резисторами, а исполнительные механизмы в виде задающих шаговых двигателей, связанных суммирующими механизмами с гидроусилителями, причем силовые выходы первого контроллера через токозадающие резисторы соединены с фазовыми обмотками пары шаговых двигателей управления гидроусилителями гидроцилиндров одного гибочного валка, а силовые выходы второго контроллера - с фазовыми обмотками шаговых двигателей другого гибочного валка и шагового двигателя трехлинейного регулятора расхода, при этом соединение гибочных валков с гидроусилителями выполнено в виде поворотных рычагов, на одном конце каждого из которых установлены зубчатые секторы, взаимодействующие с шестернями, кинематически связанными с гидроусилителями, причем последние и зубчатые секторы снабжены устройствами контроля положения.
