Изобретение относится к геофизике, а именно к устройствам для измерения вариаций магнитных полей при геофизических исследованиях.
Известно устройство для измерения слабых геомагнитных полей [1] , содержащее последовательно соединенные задающий генератор, усилитель мощности, блок фильтров, феррозондовый датчик, избирательный усилитель, фильтр низких частот, измерительный прибор и синхронный детектор, выполненный по компенсационной схеме на усилителе с коммутацией перемены знака выходного напряжения, выходным каскадом которого является сумматор. В этом устройстве для повышения чувствительности и термостабильности задающий генератор выполнен на основе кварцевого резонатора и применен триггерный делитель частоты, а последовательно и встречно измерительной обмотке феррозонда подключен компенсатор неизмеряемой части магнитного поля, выполненный по схеме стабилизатора тока с токовым зеркалом. Использование компенсатора магнитного поля Земли (МПЗ) позволяет феррозондовому датчику постоянно находится в нулевом поле, а применение дифференциальной пары транзистора обеспечивает достаточно низкий температурный коэффициент датчика.
Известно, что одним из основным недостатков приборов, выполненных на основе феррозондовых датчиков, является наличие достаточно большого температурного коэффициента, то есть так называемого "температурного хода". При изменении температуры окружающей среды изменяется и активное сопротивление обмоток феррозондового датчика, выполненных, как правило, медным проводом (температурный коэффициент меди равен 0,0039 град-1). Так, например, изменение температуры окружающей среды в течение суток ("суточный ход") на 15-20оС ведет к изменению сопротивления обмоток феррозондового датчика примерно на 6-8% . Это приводит к изменению тока компенсации, например, в компенсационной обмотке феррозондового датчика, служащей для компенсации неизмеряемой части МПЗ. В этом случае применяемый компенсатор МПЗ должен автоматически отрабатывать это изменение с точностью по крайней мере 1˙ 10-5, т. е. с точностью до 1 нТл удерживать феррозондовый датчик в нулевом поле.
Это практически означает, что ток компенсации неизмеряемой части МПЗ должен сохраняться с ошибкой не более 0,00005 мА (59 нА) при его величине порядка 5 мА (если постоянная компенсационной обмотки феррозондового датчика равна Ск = 10000 нТл/мП). Однако такое устройство, выполненное на транзисторах с регулировкой на постоянном токе, не позволяет реализовать требуемую точность при изменяющейся температуре окружающей среды.
Практика разработки, испытаний и применений такого типа устройств показывает, что максимально достижимый относительный температурный коэффициент феррозондового датчика при такой [1] схеме построения компенсатора неизмеряемой части МПЗ лежит в пределах от 10 ˙ 10-6 до 30 ˙ 10-6 град-1 в диапазоне температур от -70 до +70оС, что приводит к появлению значительной дополнительной погрешности измерений, связанной с изменением температуры окружающей среды.
Известный феррозондовыый магнитометр [2] , принятый за прототип, содержит феррозондовый датчик с компенсационной обмоткой, блок электроники и блок ступенчатой компенсации поля, включающий в себя реверсивный счетчик, цифроаналоговый преобразователь (ЦАП), источник опорного напряжения, компаратор и схему управления. В этом магнитометре компенсационная обмотка феррозондового датчика намотана на каркасе из слюдоситала, имеющего очень малый температурный коэффициент, что позволило снизить относительный температурный коэффициент блока датчиков до значения 7 ˙ 10-6/оС. При этом рядом с феррозондовым датчиком установлен датчик температуры, позволяющий одновременно с измерениями поля измерять и температуру окружающей среды в месте установки датчика и при обработке результатов учитывать дополнительные влияющие факторы.
Недостатком такого магнитометра является то, что истинные результаты измерения магнитного поля нельзя получать в темпе эксперимента, а только после проведения обработки, включающей вычитание из полученных результатов дополнительной погрешности, связанной с изменением температуры окружающей среды в период проведения измерений магнитного поля. Т. е. результаты измерения магнитного поля у [2] будут осложнены наличием "температурного дрейфа" датчика.
Цель изобретения - повышение точности измерений за счет исключения погрешности, связанной с температурной нестабильностью параметров феррозондового датчика.
Скомпенсировать температурный дрейф феррозондового датчика можно, если, реализуя мостовую схему измерения, производить преобразование медленно меняющегося от изменения температуры сопротивления компенсационной обмотки феррозондового датчика относительно опорного температуронезависимого резистора в переменное напряжение для его последующего усиления, детектирования обратного преобразования в постоянное напряжение, которое служит для управления регулирующим элементом, включенным последовательно в цепь с источником опорного напряжения и компенсационной обмоткой феррозондового датчика. В этом случае можно организовать следящее устройство, точность которого будет определяться коэффициентом усиления петли обратной связи, а именно коэффициентом усиления усилителя переменного тока.
Цель достигается тем, что в магнитную вариационную станцию, содержащую феррозондовый датчик с компенсационной обмоткой, блок электроники, блок ступенчатой компенсации поля, включающий в себя реверсивный счетчик, ЦАП, источник опорного напряжения, компаратор и схему управления, и регистратор, первый и второй входы которого подключены к седьмому и первому выходам соответственно блока электроники и блока ступенчатой компенсации поля, второй и третий выходы которого соединены соответственно с четвертым и пятым входами феррозондового датчика, а первый, второй и третий выходы подключены соответственно к четвертому, пятому и шестому выходам блока электроники, первый, второй входы и первый, второй, третий выходы которого соединены с одноименными выходами и входами феррозондового датчика, при этом первый и второй входы блока ступенчатой компенсации поля являются соответственно первым и вторым входами схемы управления и реверсивного счетчика, первые выход и вход которых соединены между собой, а выход реверсивного счетчика подключен к первому входу ЦАП, первый и второй выходы которого являются соответственно первым и вторым выходами блока ступенчатой компенсации поля, а второй вход ЦАП соединен с одноименным выходом схемы управления, второй и третий входы которой подключены соответственно к выходу компаратора и третьему выходу источника опорного напряжения, второй выход которого является третьим выходом блока ступенчатой компенсации поля, а первый выход подключен к одноименному входу компаратора, второй вход которого является третьим выходом блока ступенчатой компенсации поля, согласно предлагаемому изобретению, дополнительно в состав схемы блока ступенчатой компенсации поля введены прецизионный усилитель, матрица эталонных сопротивлений, усилитель постоянного тока и регулирующий элемент, выход которого подключен к пятому входу феррозондового датчика и является третьим выходом блока ступенчатой компенсации поля, а первый и второй входы соединены соответственно с вторым выходом источника опорного напряжения и с выходом прецизионного усилителя, первый и второй входы которого подключены соответственно к одноименным выходам матрицы эталонных сопротивлений, второй вход которой подключен к четвертому выходу источника опорного напряжения, а третий выход соединен с четвертым входом феррозондового датчика и является одновременно вторым выходом блока ступенчатой компенсации поля, а первый вход матрицы эталонных сопротивлений соединен через усилитель постоянного тока с вторым выходом ЦАП.
С целью повышения точности преобразования в управляющий сигнал изменения медленно меняющегося от температуры сопротивления компенсационной обмотки феррозондового датчика, в схему блока ступенчатой компенсации магнитной вариационной станции введен дополнительный прецизионный усилитель, включающий в себя предусилитель постоянного тока с преобразованием сигнала типа М-ДМ (предусилитель М-ДМ), усилитель и интегратор, выход которого является выходом прецизионного усилителя, а вход через усилитель подключен к выходу предусилителя М-ДМ, первый и второй входы которого являются одноименными входами прецизионного усилителя. Введенная с целью повышения термостабильности в схему магнитной вариационной станции матрица эталонных сопротивлений выполнена на одной подложке.
С целью дополнительного повышения точности измерений за счет исключения влияния температуры окружающей среды на результаты измерений магнитного поля в состав блока ступенчатой компенсации магнитной вариационной станции введен дополнительный саморегулирующийся позисторный нагреватель, внутри которого расположены матрица эталонных сопротивлений, а также некоторые температурозависимые элементы схемы ЦАП и источника опорного напряжения, причем третий вход ЦАП соединен с входом источника опорного напряжения и подключен к первому выходу саморегулирующегося позисторного нагревателя, второй выход которого подключен к третьему входу матрицы эталонных сопротивлений. Таким образом, заявляемое устройство соответствует критерию "новизна".
Такое схемное решение предлагаемого устройства позволит при дополнительной термостабилизации опорного резистора снизить погрешность, связанную с температурной нестабильностью феррозондового датчика, примерно на 1-2 порядка по сравнению с устройством [1] , работающим на постоянном токе, не применяя дополнительных линий связи, как у [2] , и получить результаты измерений, свободные от "температурного хода", в темпе эксперимента.
Предлагаемое устройство по сравнению с прототипом позволило упростить связь феррозондового датчика с блоком электроники, сократив две дополнительные линии связи, и исключить из схемы магнитной вариационной станции дополнительный измерительный канал, предназначенный для измерения температуры блока датчиков, тем самым увеличив удельную плотность полезной фиксируемой регистратором информации об измеряемом магнитном поле на единицу объема носителя, что позволяет сделать вывод о соответствии критерию "существенные отличия".
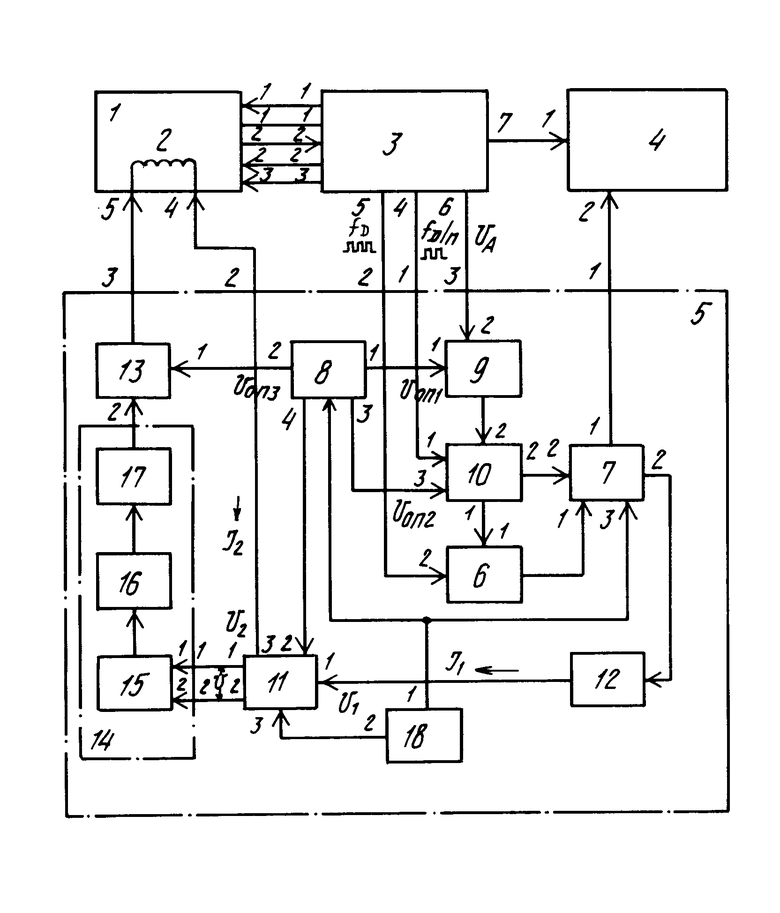
На чертеже представлена блок-схема предлагаемой магнитной вариационной станции.
Магнитная вариационная станция содержит феррозондовый датчик 1 с компенсационной обмоткой 2, блок 3 электроники, регистратор 4 и блок 5 ступенчатой компенсации поля (БСКП). В состав БСКП 5 входят: реверсивный счетчик 6, ЦАП 7, источник 8 опорного напряжения (ИОН) с компаратором 9 и схемой 10 управления, а также матрицы 11 эталонных сопротивлений (МЭС), усилитель 12 постоянного тока (УПТ), элемент 13 регулирующий, прецизионный усилитель 14, включающий в себя предусилитель 15 М-ДМ, усилитель 16 и интегратор 17.
При этом реализуется мостовая измерительная схема, в одно из плеч которой включен ЦАП 7 с УПТ 12 и схемой 10 управления, во второе и третье плечи включены два одинаковых эталонных сопротивления, входящие в состав МЭС 11 и размещенные, с целью повышения термостабильности, на одной подложке, а в четвертое плечо последовательно с компенсационной обмоткой 2 феррозондового датчика 1 включен элемент 13 регулирующий. Одна из диагоналей этой мостовой измерительной схемы соединена с ИОН 8, а в другую диагональ включен прецизионный усилитель 14, выход которого подключен к второму входу элемента 13 регулирующего.
Для обеспечения термостабильности отдельные элементы мостовой измерительной схемы, такие как МЭС 11, точные резисторы и стабилитроны ИОН 8 и резисторная матрица ЦАП 7, установлены внутри саморегулирующегося позисторного нагревателя 18, который может быть выполнен как секционным (для каждого из выше перечисленных элементов схемы), так и единым для всей конструкции и, в зависимости от приложенного к нему напряжения питания, может автоматически поддерживать температуру внутри на уровне, например, +45. . . 55оС с точностью порядка 1. . . 2оС.
Магнитная вариационная станция работает следующим образом. В исходном состоянии на первом и третьем выходах ИОН 8 сформированы опорные напряжения Uоп1 и Uоп2, определяемые соответственно динамическим диапазоном работы феррозондового датчика 1 в нулевом магнитном поле и диапазоном преобразования ЦАП 7, а на втором выходе ИОН 8 сформировано опорное напряжение Uоп3, предназначенное для питания схемы измерительного моста. На выходе реверсивного счетчика 6 установлен код, соответствующий значению ступени компенсации неизмеряемой части МПЗ в районе проведения измерений, а через ветвь измерительного моста, включающую схему 10 управления, ЦАП 7, УПТ 12 и одно из эталонных сопротивлений МЭС 11, протекает ток I1, соответствующий полю компенсации неизмеряемой части МПЗ для введения феррозондового датчика 1 в нулевое поле и зависящий от величины опорного напряжения Uоп2. Через другую ветвь измерительного моста, включающую элемент 13 регулирующий, компенсационную обмотку 2 феррозондового датчика 1 и другое эталонное сопротивление МЭС 11, течет ток I2, определяемый постоянной Ск и активным сопротивлением компенсационной обмотки 2 феррозондового датчика 1, величиной переходного сопротивления элемента 13 регулирующего, сопротивлением второго эталонного сопротивления МЭС 11 и зависящий от величины опорного напряжения Uоп3. В исходном состоянии неизмеряемая часть МПЗ полностью скомпенсирована током I2, протекающим в компенсационной обмотке 2 феррозондового датчика 1. На шестом выходе блока 3 электроники (аналоговом выходе магнитометра) сформирован выходной сигнал магнитометра - аналоговое напряжение Uа, пропорциональное амплитуде вариации магнитного поля в данный момент времени в выбранной точке измерения. Величина этого напряжения определяется динамическим диапазоном измерения вариаций магнитной вариационной станции и лежит в пределах 0 ≅ Ua ≅ Uоп1. При этом на выходе компаратора 9 сформирован потенциал, соответствующий логическому "0", падения напряжений на обоих эталонных сопротивлениях МЭС 11, определяемые протекающими по ним токам I1 и I2, будут одинаковы U1 = U2, а разность потенциалов в диагонали измерительного моста будет равна нулю, т. е. между первым и вторым входами прецизионного усилителя 14 (предусилителя 15 М-ДМ) будет U = 0. Частота преобразования для усилителя 15 М-ДМ (модулятор-демодулятор) fм = 1 кГц выбрана примерно на 2-3 порядка выше частоты fD, поступающей на второй вход реверсивного счетчика 6 с пятого выхода блока 3 электроники, и, в общем случае, может быть выбрана даже равной частоте возбуждения феррозондового датчика 1.
Ток I2, протекающий в компенсационной обмотке 2, создает заданную величину компенсирующего поля для феррозондового датчика 1. В исходном состоянии измерительный мост находится в скомпенсированном равновесии, и любое изменение сопротивления компенсационной обмотки 2 от температуры приведет к разбалансу мостовой схемы U1 ≠ U2. При этом в диагонали измерительного моста (на входе прецизионного усилителя 14) появится разность потенциалов U ≠ 0. При помощи предусилителя 15 М-ДМ это постоянное напряжение преобразуется в низкочастотное переменное напряжение (частотой, например, fм = 1 кГц), усиливается, детектируется демодулятором и поступает на вход усилителя 16, который обеспечивает необходимое усиление сигнала для обеспечения общего коэффициента усиления прецизионного усилителя 14, т. е. для обеспечения общего коэффициента усиления петли обратной связи следящей системы. С выхода усилителя 16 усиленное переменное напряжение поступает на вход интегратора 17, где оно преобразуется в постоянное напряжение, которое поступает на второй вход элемента 13 регулирующего и является для него управляющим напряжением. Элемент 13 регулирующий в зависимости от знака и величины разности потенциалов U в диагонали измерительного моста увеличивает или уменьшает величину тока I2, протекающего в компенсационной обмотке 2. Скорость обработки разбаланса в диагонали измерительного моста определяется частотой модуляции fм и постоянной времени интегратора 17.
Изменение внешнего магнитного поля вызывает изменение величины аналогового напряжения Ua на шестом выходе блока 3 электроники. Если величина Ua выходит за пределы указанного диапазона (Ua < 0 или Ua > Uоп1), то на выходе компаратора 9 формируется потенциал, соответствующий логической "1", а на первом выходе схемы 10 управления формируется потенциал, соответствующий логической "1", если Ua > Uоп1 или соответствующий логическому "0", если Ua < 0. При этом на второй (счетный) вход реверсивного счетчика 6 начинают поступать импульсы частотой fD с пятого выхода блока 3 электроники. Каждый импульс частоты fD, поступающий на счетный вход реверсивного счетчика 6, в зависимости от потенциала на его первом входе изменяет код, записанный в этом счетчике и соответствующий предыдущему значению поля компенсации неизмеряемой части МПЗ, увеличивая или уменьшая его значение. Этот код, поступая на первый вход ЦАП 7, преобразуется в аналоговое напряжение и далее, на выходе УПТ 12, преобразуется в ток I11, который отличается от тока I1 на величину, пропорциональную увеличению или уменьшению кода на первом входе ЦАП 7. При этом ток I11 вызывает разбаланс измерительного моста, т. е. U ≠ 0, что, в свою очередь, приводит, как было описано выше, к изменению тока I2 до тех пор, пока измерительный мост не установится в скомпенсированное равновесие, т. е. когда 0 ≅ Ua≅ ≅ Uоп1 и U = 0. В этом случае на выходе компаратора 9 устанавливается потенциал, соответствующий логическому "0", и перестают поступать импульсы с частотой fD на второй вход реверсивного счетчика 6 с пятого выхода блока 3 электроники. Система входит в следящий режим, а на втором выходе схемы 10 управления формируется импульс частоты fD/n, поступающей с четвертого выхода блока 3 электроники, который поступает на второй вход ЦАП 7 и перезаписывает информацию о номере ступени компенсации неизмеряемой части МПЗ и ЦАП 7 на второй вход регистратора 4, на первый вход которого одновременно записывается информация о величине вариации измеренного магнитного поля с седьмого выхода блока 3 электроники.
На чертеже видно, что БСКП 5 включает в свой состав как бы две петли обратной связи, одна из которых формирует эталонный ток I1 для компенсации неизмеряемой части МПЗ, который служит для ввода феррозондового датчика 1 в нулевое поле (т. е. для обеспечения условия 0 ≅ Ua ≅ Uоп1), а другая служит для поддержания состояния скомпенсированного равновесия в диагонали измерительного моста (для выполнения условия U1 = U2 и U = 0), т. е. для устранения всех изменений, связанных с изменением величины сопротивления компенсационной обмотки 2 феррозондового датчика 1, определяемых изменением температуры окружающей среды.
Для обеспечения одинакового изменения сопротивления отдельных эталонных сопротивлений, входящих в состав МЭС 11, при изменении температуры окружающей среды, все они расположены максимально близко друг к другу и установлены на одной подложке. В этом случае МЭС 11 может быть выполнена в виде микросхемы или можно использовать типовые интегральные микросхемы серии 318, например, 318НР8В. Тем самым можно по крайней мере в 2-3 раза повысить термостабильность опорных элементов измерительной следящей системы.
Для повышения точности измерений при больших изменениях температуры окружающей среды МЭС 11 совместно с отдельными ответственными за точность формирования тока I1элементами схем ЦАП 7 и ИОН 8 (например, точные сопротивления, стабилитроны) могут быть установлены внутри саморегулирующегося позисторного нагревателя 18, температура внутри которого зависит от величины приложенного к нему постоянного напряжения. При этом простой одноступенчатый термостат, выполненный на основе саморегулирующегося позисторного нагревателя, позволяет поддерживать температуру внутри него с точностью 1-2оС на уровне, например, 45-55оС при изменении температуры окружающей среды в диапазоне, например, от -10 до +40оС, что позволяет повысить точность формирования и стабильность тока I1 и тем самым примерно в 10-20 раз уменьшить погрешность измерения, связанную с температурной нестабильностью сопротивления компенсационной обмотки 2 феррозондового датчика 1.
Саморегулирующийся позисторный нагреватель 18 может быть выполнен как единым для всех температурозависимых элементов схемы, так и может быть сделан секционным, т. е. для каждого из температурозависимых элементов магнитной вариационной станции, расположенных в различных ее блоках. При этом основным критерием для его установки в том или ином блоке станции является только наличие питающего напряжения постоянного тока.
Реализация предлагаемого устройства возможна полностью на интегральных микросхемах. Например, компаратор 9 может быть выполнен на интегральном компараторе типа К554СА1 или К554СА3, реверсивный счетчик 6 может быть построен на двоичных счетчиках типа К561ИЕ11, схема управления может быть выполнена на IK-триггерах типа К561ТВ1, на инверторах К561ЛН1 или К561ЛН2 и на схемах совпадения К561ЛА7. Схема ЦАП может быть построена на основе микросхем К572ПА1 или К572ПА2, а УПТ 12 может быть выполнен на базе операционного усилителя КР140УД1208 или К140УД8. ИОН 8 может быть выполнен на базе операционного усилителя КМ551УД1 или 153УД5 и прецизионных стабилитронов типа КС191Ф или Д818Е, а прецизионный усилитель 14 может быть собран с применением операционных усилителей К140УД13 и К140УД6. В качестве МЭС 11 может быть использована, как было указано выше, микросхема 318НР8В, а элемент 13 регулирующий может быть выполнен на полевом транзисторе КП303В или КПС104А. В качестве регистратора 4 может быть использован бытовой кассетный магнитофон или типовой двухканальный самопишущий потенциометр, а в качестве датчика 1 с компенсационной обмоткой 2 может применяться, например, магнитометр СГ-76, сопротивление компенсационной обмотки которого равно 100 Ом, а постоянная Ск = 10000 нТл/мА.
Предложенная схема позволяет значительно уменьшить погрешность, вызванную температурной нестабильностью параметров феррозондового датчика, а именно погрешность, связанную с температурным дрейфом тока компенсации I2, который с определенной точностью должен удерживать датчик магнитной вариационной станции в диапазоне измерений, т. е. в диапазоне нулевых полей. Эта погрешность может быть уменьшена по крайней мере на порядок по сравнению с прототипом. Применение матрицы эталонных сопротивлений, выполненных на одной общей подложке, позволяет повысить термостабильность следящей измерительной системы, реализованной в схеме магнитной вариационной станции, что позволит снизить обычную погрешность измерений, связанную с наличием межблочного температурного градиента и разными температурными зависимостями входящих в эти блоки элементов, примерно в 2-3 раза. Применение дополнительного термостатирования температурозависимых прецизионных элементов схем станции, ответственных за точность поддержания тока I1, выполненное на основе саморегулирующегося позисторного нагревателя, позволяет снизить погрешность, связанную с температурной нестабильностью сопротивления компенсационной обмотки феррозондового датчика, примерно на 1-2 порядка по сравнению с прототипом, и тем самым повысить точность измерения магнитного поля. Такая схема построения станции позволяет избавиться от дополнительных линий связи феррозондового датчика с блоком электроники, необходимых, как у прототипа, для контроля температуры в блоке датчика, и получать результаты измерения, свободные от влияния температуры окружающей среды, в темпе эксперимента. (56) 1. Авторское свидетельство СССР N 1347063, кл. G 01 V 3/00, 1987.
2. Магнитометр феррозондовый ФМ-2. Проспект СКБ ФП ИОФ АН СССР, 1987.
Использование: измерения вариаций магнитного поля Земли (МПЗ). Сущность изобретения: магнитная вариационная станция выполнена на основе феррозондового датчика, содержащего компенсационную обмотку для компенсации неизмеряемой части МПЗ, и включает в свой состав блок электроники, блок ступенчатой компенсации поля и регистратор. В состав блока ступенчатой компенсации входят реверсивный счетчик, цифроаналоговый преобразователь, источник опорного напряжения, компаратор, прецизионный усилитель, матрица эталонных сопротивлений, регулирующий элемент, усилитель постоянного тока и схема управления. При этом прецизионный усилитель осуществляет управление регулирующим элементом, включенным в цепь последовательно с источником опорного напряжения и компенсационной обмоткой феррозондового датчика, для уменьшения дрейфа тока компенсации, вызванного изменением температуры окружающей среды. 3 з. п. ф-лы, 1ил.
