Изобретение относится к автоматизации и механизации производственных процессов и может быть использовано, например, в конструкциях подвесных манипуляционных устройств, в разгрузочных устройствах и в другом технологическом оборудовании.
Известно устройство для дистанционного управления манипуляционным механизмом, содержащее отдельно расположенные стойку с системой управления и исполнительный орган, связанные между собой соответствующей сетью линий передач управляющих команд и сигналов датчиков положения исполнительного органа. В частности, линии могут быть выполнены в виде оптоволоконных жгутов, которые соединяют блоки преобразования и передачи сигнала, расположенные, например, на стойке, и соответствующие блоки приема и преобразования сигнала, расположенные на исполнительном органе.
Недостатком известного устройства является сложность и громоздкость конструкции, что делает практически невозможным ее использование, например, в подвижных механизмах.
Известны системы дистанционного управления с кодово-частотной передачей управляющих и других команд от пульта управления к исполнительным элементам осуществляемой, напримерб по индуктивной линии связи. Такие системы содержат ключевые элементы управления, расположенные на пульте, соответствующие частотные генераторы, усилительно-преобразующие блоки, блоки приема и передачи управляющих сигналов, линии связи пульта управления и исполнительных элементов.
Недостатком этих систем также является их сложность и громоздкость.
Известно устройство для управления манипулятором [1] , содержащее ряд каналов управления, один из которых, например канал управления исполнительным электромагнитом защелки ковша манипулятора включает последовательно связанные источник сигнала (питания), одновибратор, триггер и коммутатор, который соответствующей электропроводной линией связан с исполнительным электромагнитом защелки. Коммутатор и исполнительный электромагнит, кроме того, дополнительно связаны с соответствующими датчиками положения исполнительных элементов.
Недостатком данного технического решения - прототипа следует признать большое количество технологических линий связи между управляющими, исполнительными элементами и датчиками обратных связей, что усложняет конструкцию устройства, особенно при значительном удалении элементов друг от друга.
Кроме того, в некоторых случаях дистанционной передачи управляющего сигнала, например, на исполнительный механизм, установленный на конце тросовой грузонесущей подвески, становится весьма сложной организация и конструктивное размещение надежной и достаточно простой двухпроводной линии связи, необходимой для передачи управляющего сигнала.
Сущность изобретения заключается в том, что в устройство, содержащее источник управляющего сигнала, исполнительный электромагнит, линию связи и канал обратной связи, дополнительно введены генератор свободных статических зарядов, управляющий элемент, а также последовательно соединенные накопитель-преобразователь зарядов и первый пороговый элемент, выход которого подключен к входу исполнительного электромагнита, при этом вход источника управляющего сигнала соединен с соответствующим выходом управляющего элемента, а выход - с входом генератора свободных статических зарядов, связанного с накопителем-преобразователем зарядов через линию связи, выполненную в виде грузонесущего токопроводящего троса, на одном из концов которого установлен основной исполнительный механизм, гальванически связанный своим корпусом с накопителем-преобразователем зарядов, кроме того, канал обратной связи выполнен в виде последовательно соединенных датчика тока, второго порогового элемента, элемента задержки, элемента памяти и индикатора, причем вход датчика тока соответствующим образом подключен к генератору свободных статических зарядов.
Возможны варианты выполнения устройства, где для повышения надежности в него дополнительно введен третий пороговый элемент, подключенный параллельно первому пороговому элементу к соответствующему входу исполнительного электромагнита, а также введен дополнительный исполнительный электромагнит для управления вспомогательным исполнительным механизмом, установленным на втором конце грузонесущего троса, причем вход этого электромагнита соединен с соответствующим выходом управляющего элемента.
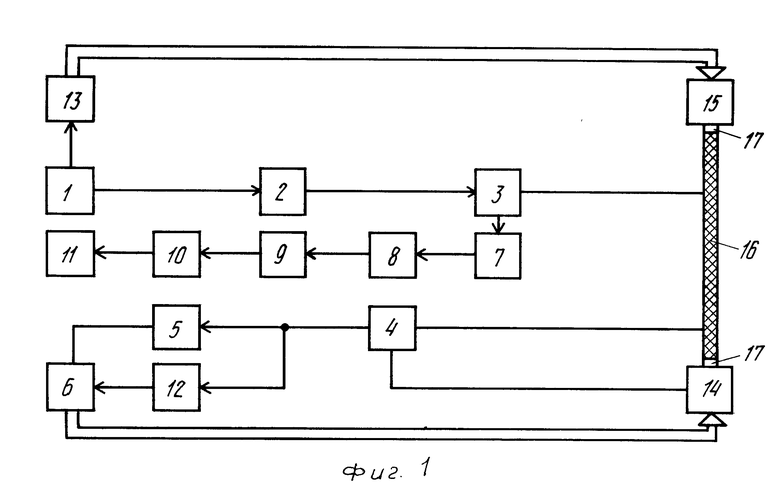
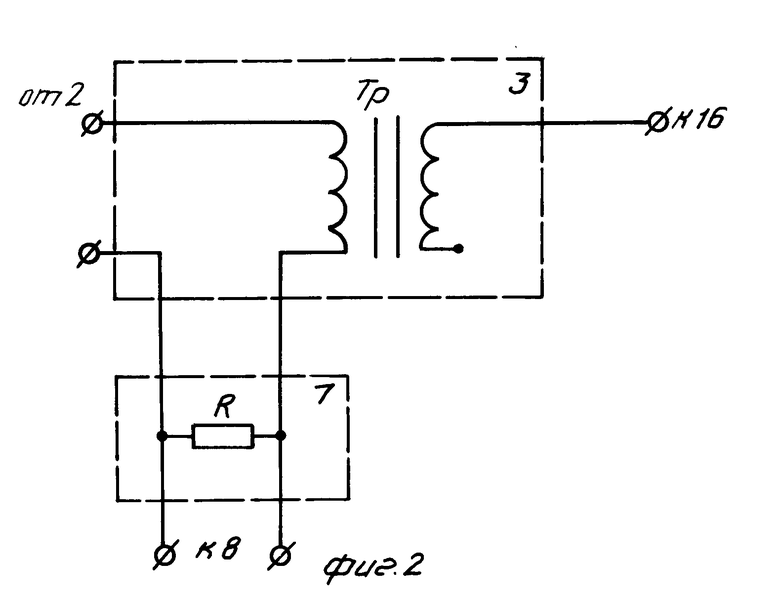
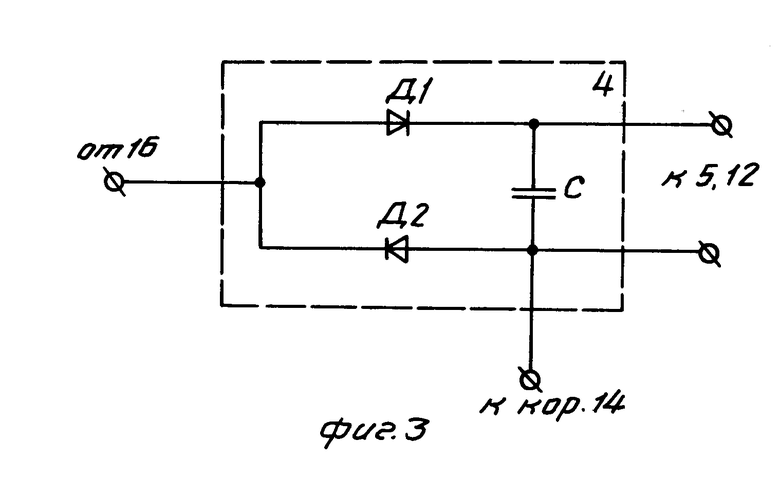
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - вариант выполнения генератора свободных статических зарядов; на фиг. 3 - вариант выполнения накопителя-преобразователя зарядов.
Устройство содержит управляющий элемент 1, источник 2 управляющего сигнала, генератор 3 свободных статических сигналов, накопитель-преобразователь 4 зарядов, первый пороговый элемент 5, исполнительный электромагнит 6, датчик 7 тока, второй пороговый элемент 8, элемент 9 задержки, элемент 10 памяти, индикатор 11, третий пороговый элемент 12, дополнительный исполнительный электромагнит 13, основной исполнительный механизм 14, вспомогательный исполнительный механизм 15, грузонесущий токопроводящий трос 16, изоляторы 17.
Устройство работает следующим образом.
С управляющего элемента 1 подается сигнал на включение источника 2 управляющего сигнала, выполненного в виде генератора переменного, например, синусоидального сигнала. С источника 2 переменный сигнал поступает на вход генератора 3, т. е. например, на клеммы первичной обмотки трансформатора Тр (фиг. 2), на потенциальной шине вторичной обмотки которого возникают электростатические свободные заряды. Плотность этих зарядов в соответствии с изменением сигнала на входе генератора 3 будет периодически увеличиваться или уменьшаться, что обусловит перетекание свободных зарядов по проводящему тросу 16 на накопитель-преобразователь 4 и тем самым повышение или понижение потенциала тела, определяемого емкостью троса 16 и исполнительного механизма 14, гальванически связанных через накопитель-преобразователь 4.
В накопителе-преобразователе 4 часть энергии электрического поля, создаваемого свободно движущимися (перетекающими) зарядами, преобразуются, например, с помощью вентилей D1 и D2 (фиг. 3) в энергию заряда конденсатора C. В результате нескольких циклов заряда-перезаряда, обусловленных периодически изменяющимся направлением перетекания свободных статических зарядов, растет уровень запасенной в конденсаторе C энергии. При уровне заряда конденсатора C, превышающем порог срабатывания первого порогового элемента 5, происходит разряд конденсатора С на обмотку исполнительного электромагнита 6, который срабатывает, в результате чего размыкается защелка исполнительного механизма 14.
При сбросе энергии конденсатора C на обмотку электромагнита 5 резко увеличивается ток в накопителе-преобразователе 4, что приводит из-за соответствующего перетекания свободных зарядов к росту потенциала на вторичной обмотке трансформатора Тр и соответственно на его первичной обмотке. При этом на датчике 7 (резисторе R фиг. 2) возрастает сигнал, срабатывает второй пороговый элемент 8, в результате чего через время задержки, создаваемое элементом 9, элемент 10 памяти фиксирует, а индикатор 11 индицирует факт срабатывания электромагнита 6. Элемент 9 задержки обеспечивает соответствующую временную задержку, необходимую для предотвращения факта срабатывания электромагнита 6 от первичного кратковременного броска тока, возникающего в момент начала заряда конденсатора C.
В устройстве может быть предусмотрен дубляж обмоток электромагнита 6. В случае несрабатывания электромагнита по цепи порогового элемента 5 происходит дальнейший заряд конденсатора C до момента срабатывания третьего порогового элемента 12, что приводит к срабатыванию электромагнита с помощью дополнительной обмотки.
Кроме того, при повреждении одного из элементов, обеспечивающих срабатывание основного исполнительного механизма 14 (что возможно по условиям эксплуатации устройства), оператор имеет возможность сигналом с управляющего элемента 1 вызвать срабатывание дополнительного электромагнита 13 и тем самым размыкание защелки вспомогательного исполнительного механизма 15. (56) Авторское свидетельство СССР N 1284756, кл. B 25 J 13/00, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| Приводное устройство с энергоаккумуляторами, способ управления приводным устройством и способ управления энергоаккумуляторами приводного устройства | 2016 |
|
RU2647804C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОННЫЙ ДВУХРЕЖИМНЫЙ РАСХОДОМЕР | 2017 |
|
RU2658107C1 |
| СКВАЖИННЫЙ ПРИБОР ДЛЯ ТЕЛЕМЕТРИИ И АКТИВАЦИИ МАЛОДЕБИТНЫХ И ПРОСТАИВАЮЩИХ НЕФТЯНЫХ СКВАЖИН | 2006 |
|
RU2296857C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2302953C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2254245C1 |
| Устройство для регулирования температуры | 1980 |
|
SU907514A2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ЭЛЕКТРОАГРЕГАТОВ КОСМИЧЕСКИХ АППАРАТОВ | 2009 |
|
RU2402799C1 |
| Система управления гидромеханической передачей | 1989 |
|
SU1710381A1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2388629C1 |
| КАБЕЛЬНАЯ КОМБИНИРОВАННАЯ ЛИНИЯ СВЯЗИ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ КОНТРОЛЯ, УПРАВЛЕНИЯ И БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2009 |
|
RU2399577C1 |
Использование: изобретение относится к автоматизации и механизации производственных процессов и может быть использовано, например, в конструкциях подвесных манипуляционных устройств, в различных устройствах и другом технологическом оборудовании. Сущность: устройство содержит последовательно соединенные управляющий элемент, источник управляющего сигнала, генератор свободных статических зарядов, канал обратной связи, выполненный в виде датчика тока, второго порогового элемента, элемента задержки, элемента памяти и индикатора. При этом генератор свободных статических зарядов через линию связи, выполненную в виде грузонесущего токопроводящего троса, связан с накопителем-преобразователем зарядов, выход которого через параллельно подключенные первый и третий пороговые элементы соединен с соответствующими входами основного исполнительного электромагнита. Кроме того, устройство содержит дополнительный исполнительный электромагнит, подключенный входом к соответствующему выходу управляющего элемента. 2 з. п. ф-лы, 3 ил.
