и клапан 8 блокировки гидротрансформатора, и устр01 1ство 2 плавного включения фрикционов коробки передач, состоящее из блока 16 клапанов 17 плавяости сливного типа, дискретного регулятора 18 давления, построенного на электромагнитных клапанах 23 и электронного блока 19 управления регулятором. Входы последнего связаны с
информационными выходами системы 3. Блок 19 по выбранным из постоянного запоминающего устройства программам управляет регулятором 18, который задает во времени величину давления настройки клапанов 17 плавности и, соответственно, величину давления в гидроцилиндрах 13 включаемых фрикционов. 2 з.п. ф-лы, 6 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм плавного включения ступеней гидромеханической трансмиссии транспортного средства | 1981 |
|
SU1008022A1 |
| Устройство управления многоступенчатой передачей транспортного средства | 1985 |
|
SU1341072A1 |
| Система автоматического управления гидромеханической трансмиссией | 1985 |
|
SU1341071A1 |
| Механизм плавного включения гидроуправляемых фрикционных муфт коробки передач транспортного средства | 1990 |
|
SU1720906A1 |
| Система автоматического управления гидромеханической трансмиссией | 1989 |
|
SU1801804A1 |
| Гидромеханическая передача транспортного средства | 1981 |
|
SU998149A1 |
| Устройство для дистанционного управления гидромеханической трансмиссией транспортного средства | 1986 |
|
SU1397320A1 |
| Исполнительное устройство системы автоматического управления переключением передач | 1988 |
|
SU1696328A1 |
| Система управления переключением передач | 1988 |
|
SU1643211A1 |
| Механизм плавного включения передач гидромеханической трансмиссии транспортного средства | 1988 |
|
SU1581614A1 |
Изо'бретение относится к транспортной технике и может быть использовано для управления многоступенчатыми гидромеханическими передачами. Цель изобретения - расширение функциональных возможностей путем обеспечения плавного переключения многостепенных коробок передач транспортных средств большой мощности. Система содержит устройство 1 переключения передач.^ключающее систему 3 автоматического и командного управления, входы которой соединены с датчиками 4, исполнительный механизм 6 переключения передачS^CJ 00
Изобретение относится к транспортной технике, а именно к системам управления многоступенчатыми гидромеханическими передачами, в которых передачи переключаются посредством многодисковых фрикционных муфт с гидроцилиндрами.
Известны системы управления гидромеханическими передачами, в которых для обеспечения плавного включения фрикционов коробки передач применяются механизмы плавности дроссельного и сливного типа. Из них наибольшее распространение в настоящее время получили механизмы плавности сливного типа, ставшие основными в планетарных коробках передач.
Широко известны системы управления с механизмом плавного включения сливного типа, содержащим регулятор давления с переменной настройкой, осуществляемой с помощью поршневого аккумулятора, сообщенного с входом регулятора через дроссель. В начальный, период вклю чения гидроцилиндра фрикциона аккумулятор разряжен, и регулятор настроен на низкое давление. По мере зарядки аккумулятора давление настройки и, соответственно, давление в гидроцилиндре нарастает замедленно, что обеспечивает плавное включение фрикционной муфты.
Однако данный механизм формирует только один закон нарастания давления в гидроцилиндре фрикциона независимо от режимов переключения передач, что не позволяет обеспечить эффективное снижение динамических нагрузок в трансмиссии на всех режимах ее работы. Для формирования рациональных законов нарастания момента трения фрикционной муфты при ее включении требуется учет целого ряда факторов, таких как нагрузка двигателя, номер включаемой ступени, направление переключения (на высшую или низшую ступень), программа управления трансмиссие (для многопрограммных систзм - динамическая, экономическая и т.д.), частота вращения валов коробки передач и др., которые являются информационными параметрами современных автоматических систем управления гидромеханическими передачами и могут быть учтены при работе устройств плавности в составе таких систем. В получивших в последнее время широкое распространение микропроцессорных системах управления гидромеханическими передачами указанные.информационные параметры Передаются по линиям связи в цифровом виде и представляют собой как обработанные
сигналы от датчиков, так и сигналы, формируемые самой системой.
Наиболее близкой по технической сущности к предлагаемой является система с безударным переключением передач.
Система содержит устройство переключения передач и устройство плавного включения фрикционов коробки передач, включающее в себя регулятор давления, электронный блок управления регулятором,
состоящий из модулей управления и регулирования, блок определения отношения частот вращения входного (турбинного) и выходного валов коробки передач, таймер и постоянное запоминающее устройство
(ПЗУ), причем входы последнего связаны с соответствующими информационными выходами устройства переключения передач, другой выход которого соединен с первым входом таймера. Выход блока определения
отношения частот вращения связан с вторым входом таймера и с первым входом блока управления, второй вход которого связан с выходом таймера, а третий вход с информационным выходом ПЗУ. Выход
блока управления соединен с управляющим входом регулятора давления.
Известная система управления работает следующим образом.
При поступлении команды на переключение передач выходные информационные параметры устройства переключения передач подаются на адресные входы ПЗУ и по ним выбирается желаемый закон изменения передаточного отношения между ведущей и ведомой частями включаемого фрикциона 1ж в процессе переключения передач. Считанный из ПЗУ закон изменения 1ж поступает на вход блока управления, где
сравнивается с текущим значением 1т указанного передаточного отношения, которое рассчитывается блоком определения по отношению частот вращения входного и выходного валов коробки передач. На основании анализа 1ж и IT формируется сигнал управления регулятором давления, задающим, в свою очередь, величину давления во включаемом фрикционе, обеспечивающую его плавное включение в соот-, ветствии с выбранным законом.
Таким образом, известная система обеспечивает задание закона нарастания давления во включаемом фрикционе в зависимости от ряда параметров, учитывающих режимы работы трансмиссии и поступающих из устройства переключения передач. Это позволяет снизить динамические нагрузки в трансмиссии при переключении пе-, редач в широком диапазоне режимов ее работы.
Однако, непосредственное изменение давления во включаемых фрикционах посредством регулятора давдения ограничивает ее область применения гидромеханическими передачами малой мощности, устанавливаемыми в основном н1 легковых автомобилях, так как практическая реализация пропорциональных регуляторов, рассчитанных на большой расход рабочей жидкости при включении фрикционов передач большой мощности, затруднительна. Другой недостаток заключается в том, что при установке данной системы на многостепенных коробках передач, применяемых на большегрузных автомобилях, возникает несоответствие передаточного отношения между входным и выходным валами коробт ки передач передаточным отношением между ведущими и ведомыми частями включаемых фрикционов из-за одновременного включения нескольких фрикционов, вызывающего разрыв жестких связей промежуточных валов коробки передач с ее входным и выходным валами. Это ограничивает область применения системы двухстепенными коробками передач, для которых передаточные отношения между ведущей и ведомой частями включаемого фрикциона и входным и выходным валами коробки передач тождественны. Таким образом известная система управления применима только для двухстепенных корббок передач транспортных средств малой мощ
НОСТИ.
Цель изобретения - расширение фyнkционал ьных возможностей путем обеспечения плавного переключения многостепенных коробок передач транспортных средств большой мощности.
Поставленная цель достигается тем, что система управления гидромеханической передачей, состоящая из устройства переключения передач и устройства плавного
включения фрикционов короЬки передач, содержащего регулятор давления, таймер, первое запоминающее устройство и злектронный блок управления, дополнительно содержит клапаны плавности сливного типа
0 по числу фрикционов коробки передач и второе постоянное запоминающее устройство, причем входы клапанов плавности соединены с поршневыми полостями гидроцилиндров соответствующих фрикционов, а
5 выходы - со сливом. В качестве регулятора давления выбран дискретный регулятор, выполненный в виде по крайней мере трех двухлинейных двухпозиционных, электромагнитных клапанов, выходные гидролинии
0 которых соединены со сливом, а входные гидролинии через соответствующие дроссели связаны с общей гидролинией регулятора, которая соединена с полостями настройки клапанов плавности и через дроссель - с
5 магистралью постоянного давления устройства переключения передач. Вход чтения первого запоминающего устройства дополнительно связан с третьим входом блока управления, четвертый вход которого соединен с информационным выходом второго запоминающего устройства. Адресные входы и вход чтения второго запоминающего устройства связаны с первыми выходами блока управления, вторые выходы которого
5 соединены через усилители мощности с обмотками управления соответствующих электромагнитных клапанов регулятора давления. Кроме того, общая гидролиния регулятора давления через дополнительный
0 дроссель соединена со сливом, а устройство плавного включения дополнительно снабжено гидравлическим аккумулятором, вход которого связан с общей гидролинией регулятора давления.
5 Сопоставительный анализ с прототипом показывает, что предлагаемая система отличается наличием клапанов плавности и второго запоминающего устройства, выполнением регулятора давления, а также
0 наличием новых внутренних связей. Предлагаемая система обеспечивает плавное переключение многостепенных коробок передач транспортных средств большой мощности, что расширяет функциональные
5 возможности системы.
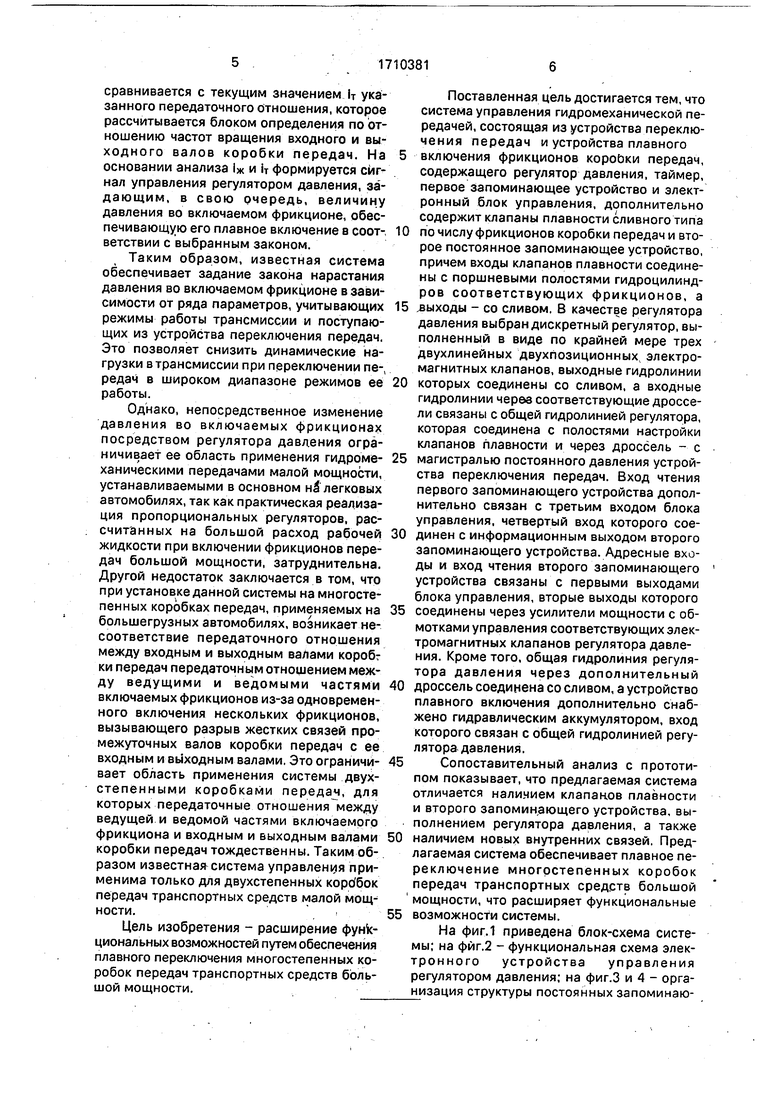
На фиг.1 приведена блок-схема системы: на фйг.2 - функциональная схема электронного устройства управления регулятором давления: на фиг.З и 4 - организация структуры постоянных запоминающих устройств; на фиг.5 - блок-схема алгоритма работы электронного устройства управления регулятором давления; на фиг.6 законы изменения выходного давления регулятора давления и соответствующие им законы изменения давления в гидроцилиндрах включаемых фрикционов.
Система управления состоит из устройства 1 переключения передач и устройства 2 плавного включения фрикционов коробки передач. Устройство переключения передач 1 в общем случае содержит систему 3 командного и автоматического переключения передач, на входы которой поступают сигналы от датчиков, условно изображенные в виде стрелок 4,контроллер 5 ручного переключения передач, исполнительный механизм 6 переключения передач с электромагнитами 7, электрогидравлический клапан 8 блокировки гидротрансформатора с электромагнитом 9. Электрическое питание к системе 3 и контроллеру 5 подается от бортового источника 10 постоянного тока. Система 3 электрическими линиями 11 соединена с электромагнитами 7 и 9. Выходы исполнительного механизма 6 гидролиниями 12 соединены с рабочими полостями гид оцилиндров 13 фрикционов коробки 14 передач и через клапан 8 с гидроцилиндром 15 фрикциона блокировки гидротрансформатора.
Устройство плавного включения фрикционов содержит блок 16 клапанов 17 плавности сливного типа известной конструкции, регулятор 18давления, выполненный в виде дискретного регулятора, и электронное устройство 19 управления регулятором, входы которого соединены с информационными выходами системы 3 автоматического и командного управления электрическими линиями 20, условно изображенными в виде стрелок. Вход регулятора 18 давления соединен гидравлической линией 21 с линией постоянного давления исполнительного механизма 6, а выход гидролинией 22 связан с полостями настройки клапанов 17 плавности. Регулятор 18 давления состоит из по крайней мере трех двухпозиционных двухлинейных электромагнитных клапанов 23, входные гидролинии 24 которых через дроссели 25 соединены с общей гидролинией 26 регулятора, а выходные гидролинии 27 связаны со сливом. Общая гидролиния 26 через дроссель 28 соединена с гидролинией 21, через дроссель 29 - со сливом, а также напрямую с гидролинией 22. Электромагниты 30 клапанов 23 электрическими линиями 31 связаны с выходами электронного устройства 19. К выходной гидролинии 22 регулятора 18
давления может быть подключен гидравлический аккумулятор 32 (показан штриховой линией).
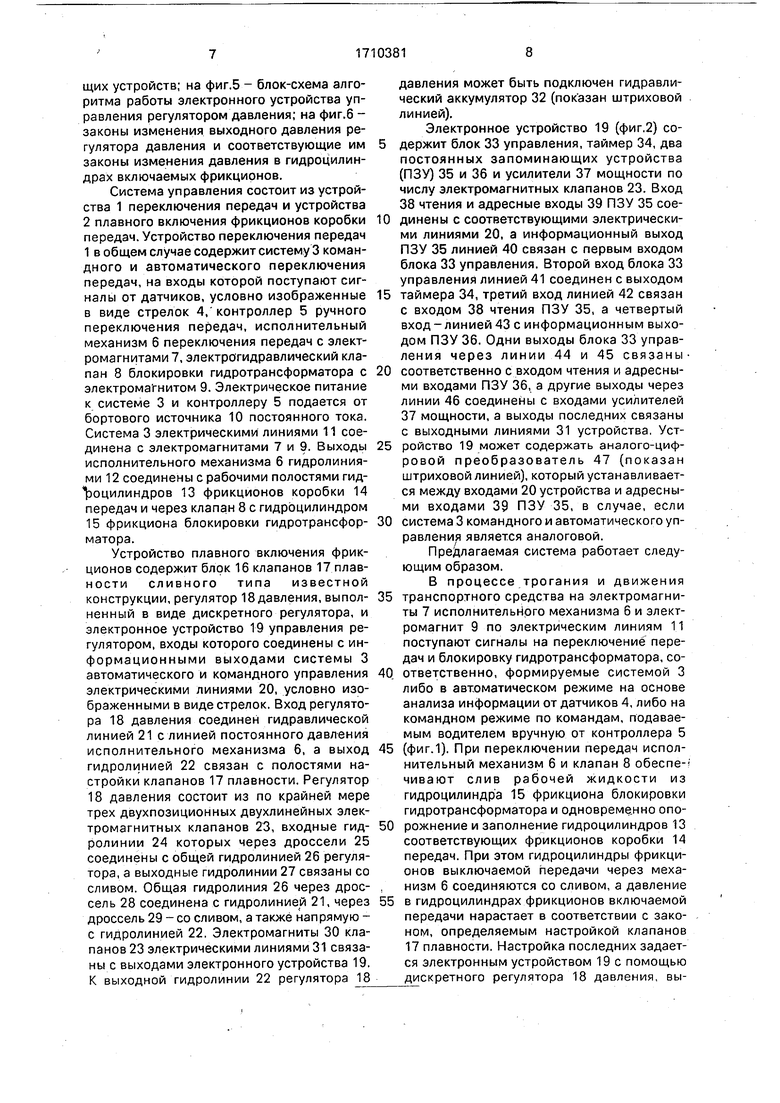
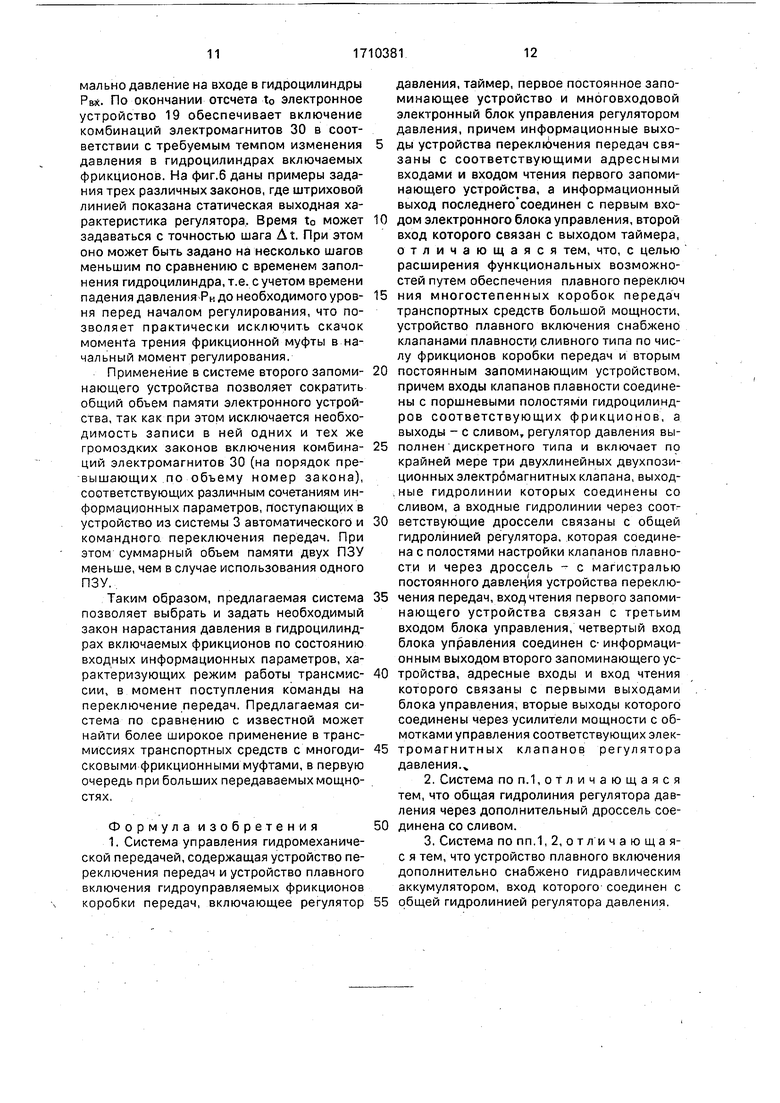
Электронное устройство 19 (фиг,2) содержит блок 33 управления, таймер 34, два постоянных запоминающих устройства (ПЗУ) 35 и 36 и усилители 37 мощности по числу электромагнитных клапанов 23. Вход 38 чтения и адресные входы 39 ПЗУ 35 соединены с соответствующими электрическими линиями 20, а информационный выход ПЗУ 35 линией 40 связан с первым входом блока 33 управления. Второй вход блока 33 управления линией 41 соединен с выходом
таймера 34, третий вход линией 42 связан с входом 38 чтения ПЗУ 35, а четвертый вход-линией 43 с информационным выходом ПЗУ 36. Одни выходы блока 33 управления через линии 44 и 45 связанысоответственно с входом чтения и адресными входами ПЗУ 36, а другие выходы через линии 46 соединены с входами усилителей 37 мощности, а выходы последних связаны с выходными линиями 31 устройства, Устройство 19 может содержать аналого-цифровой преобразователь 47 (показан штриховой линией), который устанавливается между входами 20 устройства и адресными входами 39 ПЗУ 35, в случае, если
система 3 командного и автоматического управления является аналоговой.
Предлагаемая система работает следующим образом.
В процессе трогания и движения
транспортного средства на электромагниты 7 исполнительйрго механизма 6 и электромагнит 9 по электрическим линиям 11 поступают сигналы на переключение передач и блокировку гидротрансформатора, соответственно, формируемые системой 3 либо в автоматическом режиме на основе анализа информации от датчиков 4, либо на командном режиме по командам, подаваемым водителем вручную от контроллера 5
(фиг.1). При переключении передач исполнительный механизм 6 и клапан 8 обеспечивают слив рабочей жидкости из гидроцилиндра 15 фрикциона блокировки гидротрансформатора и одновреме,нно опорожнение и заполнение гидроцилиндров 13 соответствующих фрикционов коробки 14 передач. При этом гидроцилиндры фрикционов выключаемой передачи через механизм 6 соединяются со сливом, а давление
в гидроцилиндрах фрикционов включаемой передачи нарастает в соответствии с законом, определяемым настройкой клапанов 17 плавности. Настройка последних задается электронным устройством 19 с помощью дискретного регулятора 18 давления, выходное давление которого подается в их соответствующие полости.
Электронное устройство 19 управления (фиг.2) работает следующим образом.
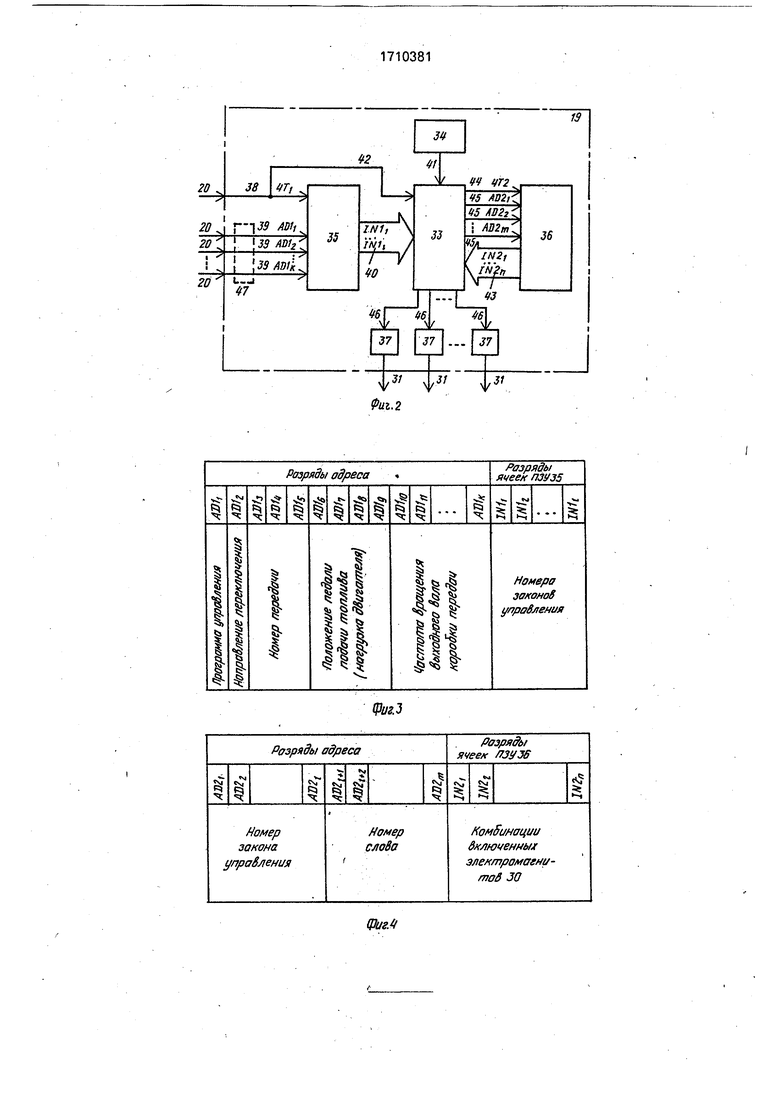
Командой на начало его работы является команда на переключение передач. Данная команда поступает из системы 3 по одной из линий 20 на вход 38 чтения ПЗУ 35 и далее по линии 42 на второй вход блока 33 управления. При этом из ПЗУ 35 считывается записанная в нем информация, соответствующая состоянию адресных входов 39 на момент поступления команды, адекватному состоянию выходных информационных параметров системы 3. Пример организации структуры ПЗУ 35 приведен на фиг.З. Сигналы из системы 3 поступают на входы 39 в цифровом виде и могут представлять собой, например, информацию о нагрузке двигателя, направлении переключения передач, номере включенной передачи, частоте вращения одного или нескольких валов коробки передач, программе управления гидромеханической передачей (для многопрограммных систем 3) и др., т.е. характеризуют режим работы трансмиссии и определяют возможностями конкретной системы 3, установленной на транспортном средстве.
При использовании аналоговой системы 3 ее информационные выходные сигналы преобразуются в цифровой код с помощью аналого-цифрового преобразователя 47. Таким образом, сигналы, поступающие на адресные входы 39 однозначно определяют в ПЗУ 35 номер закона управления регулятором 18, который по сигналу чтения (команде на переключение передач) считывается из ПЗУ 35 и через его информационный выход 40 поступает на первый вход блока 33 управления. Блок 33 через определенные интервалы времени At, задаваемые таймером 34, формирует с последовательным нарастанием номер слова, поступающий вместе со считанным номером закона управления на адресные входы ПЗУ 36. Организация структуры ПЗУ 36, приведена на фиг.4. В данном ПЗУ записаны комбинации сигналов, подаваемых на входы усилителей 37 (в виде нулей и единиц), в течение каждого шага At, т.е. содержание ПЗУ 36 определяет временную реализацию законов управления в виде комбинаций включенных электромагнитов 30 регулятора 18 давления в течение требуемого интервала Т переключения передач. Блок 33 управления через интервалы At подает команды на считывание информации из ПЗУ 36, которая через информационный выход 43 поступает обратно в блок 33 и далее через усилитель 37 на обмотки электромагнитов 30.
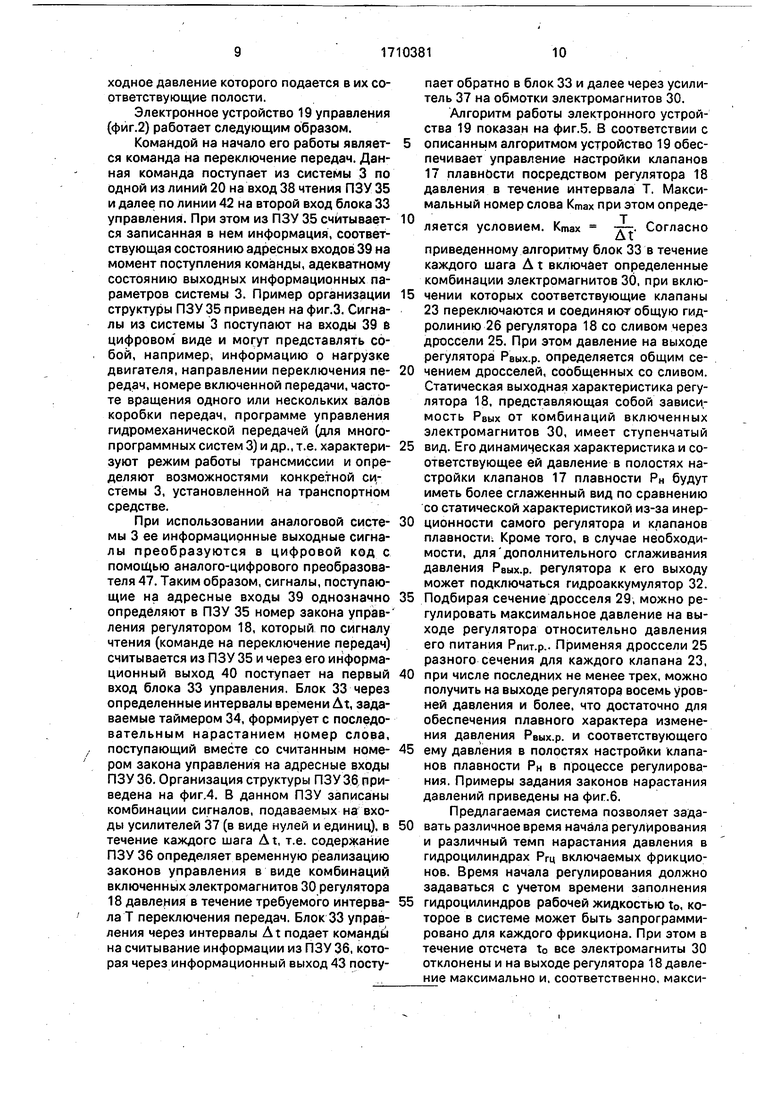
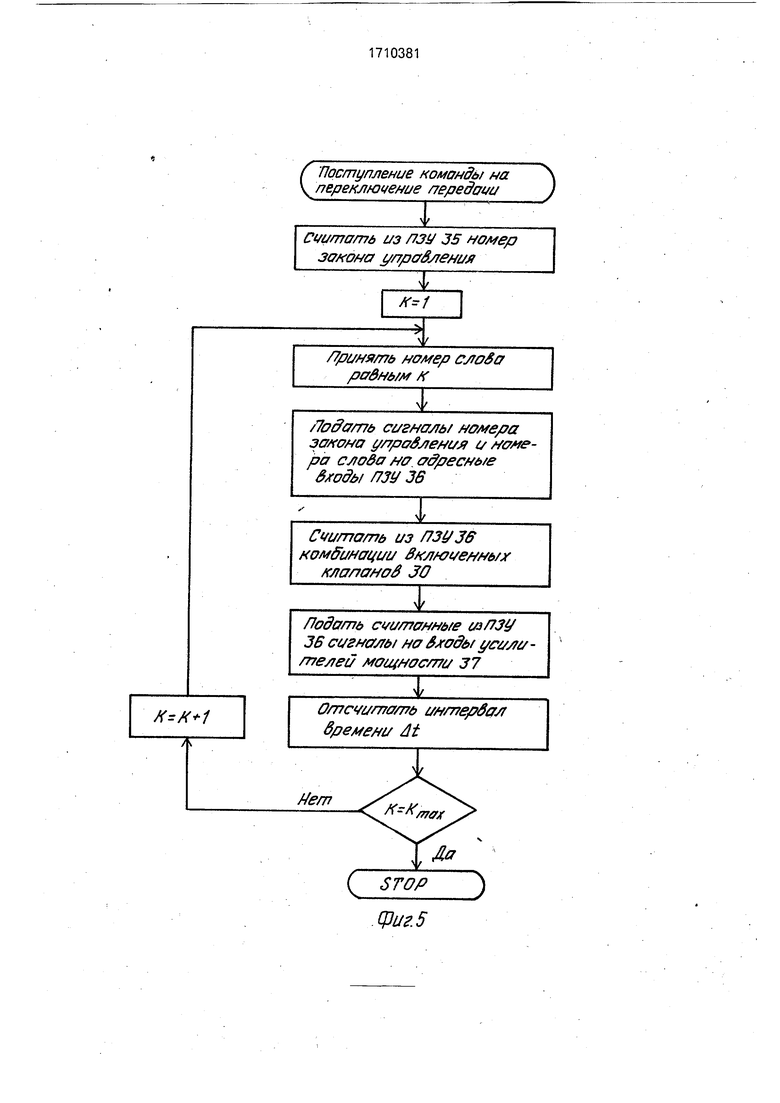
Алгоритм работы электронного устройства 19 показан на фиг.б. В соответствии с описаннь1м алгоритмом устройство 19 обеспечивает управление настройки клапанов 17 плавности посредством регулятора 18 давления в течение интервала Т. Максимальный номер слова Ктах при этом опредеТ
0
Согласно
ляется условием. Ктах
Af
приведенному алгоритму блок 33 в течение каждого шага А t включает определенные комбинации электромагнитов 30, при включении которых соответствующие клапаны 23 переключаются и соединяют общую гидролинию 26 регулятора 18 со сливом через дроссели 25. При этом давление на выходе регулятора Рвых.р. определяется общим сечением дросселей, сообщенных со сливом. Статическая выходная характеристика регулятора 18, представляющая собой зависимость РВЫХ от комбинаций включенных электромагнитов 30, имеет ступенчатый
вид. Его динами еская характеристика и соответствующее ей давление в полостях настройки клапанов 17 плавности Рн будут иметь более сглаженный вид по сравнению со статической характеристикой из-за инерционности самого регулятора и клапанов плавности; Кроме того, в случае необходимости, длядополнительного сглаживания давления Р8ых.р. регулятора к его выходу может подключаться гидроаккумулятор 32.
Подбирая сечение дросселя 29, можно регулировать максимальное давление на выходе регулятора относительно давления его питания Рпит.р.. П|эименяя дроссели 25 разного сечения для каждого клапана 23,
при числе последних не менее трех, можно получить на выходе регулятора восемь уровней давления и более, что достаточно для обеспечения плавного характера изменения давления Рвых.р. и соответствующего
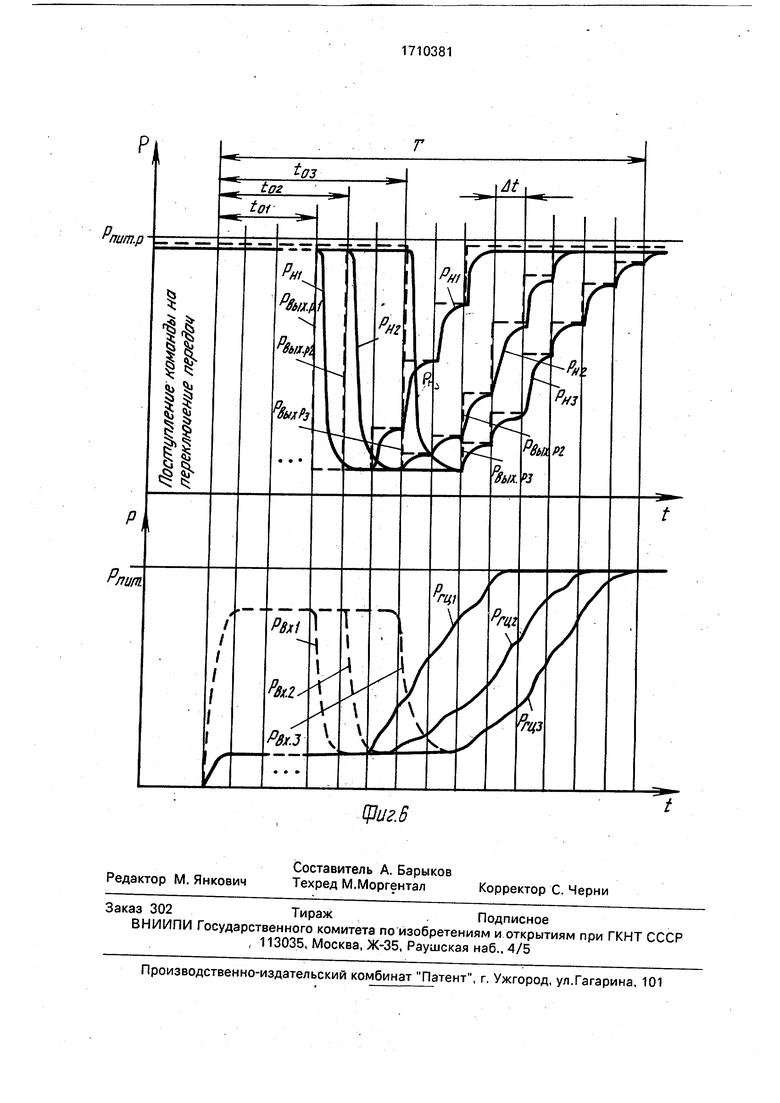
ему давления в полостях настройки клапанов плавности РН в процессе регулирования. Примеры задания законов нарастания давлений приведены на фиг.б.
Предлагаемая система позволяет задавать различное время начала регулирования и различный темп нарастания давления в гидроцилиндрах Рщ включаемых фрикционов. Время начала регулирования должно задаваться с учетом времени заполнения
гидроцилиндров рабочей жидкостью to, которое в системе может быть запрограммировано для каждого фрикциона. При этом в течение отсчета to все электромагниты 30 отклонены и на выходе регулятора 18 давление максимально и, соответственно, максимально давление на входе в гидроцилиндры Рвг. По окончании отсчета to электронное устройство 19 обеспечивает включение комбинаций электромагнитов 30 в соответствии с требуемым темпом изменения давления в гидроцилиндрах включаемых фрикционов. На фиг.6 даны примеры задания трех различных законов, где штриховой линией показана статическая выходная характеристика регулятора. Время to может задаваться с точностью шага At. При этом оно может быть задано на несколько шагов меньшим по сравнению с временем заполнения гидроцилиндра, т.е. с учетом времени падения давленияРр. до необходимого уровня перед началом регулирования, что позволяет практически исключить скачок момента трения фрикционной муфты в начальный момент регулирования.
Применейие в системе второго запоминающего устройства позволяет сократить общий объем памяти электронного устройства, так как при этом исключается необходимость записи в ней одних и тех же громоздких законов включения комбинаций электромагнитов 30 (на порядок превышающих по объему номер закона), соответствующих различным сочетаниям информационных параметров, поступающих в устройство из системы 3 автоматического и командного, переключения передач. При этом суммарный объем памяти двух ПЗУ меньше, чем в случае использования одного ПЗУ.
Таким образом, предлагаемая система позволяет выбрать и задать необходимый закон нарастания давления в гидроцилиндрах включаемых фрикционов по состоянию входных информационных параметров, характеризующих режим работы трансмиссии, в момент поступления команды на переключение передач. Предлагаемая система по сравнению с известной может найти более широкое применение в трансмиссиях транспортных средств с многодисковыми фрикционными муфтами, в первую очередь при больших передаваемых мощностях.
Формула изобретения 1. Система управления гидромеханической передачей, содержащая устройство переключения передач и устройство плавного включения гидроуправляемых фрикционов коробки передач, включающее регулятор
давления, таймер, первое постоянное запоминающее устройство и многовходовой электронный блок управления регулятором давления, причем информационные выходы устройства переключения передач связаны с соответствующими адресными входами и входом чтения первого запоминающего устройства, а информационный выход последнегосоединен с первым входом электронного блока управления, второй вход которого связан с выходом таймера, отличающаяся тем, что, с целью расширения функциональных возможностей путем обеспечения плавного переключ
ния многостепенных коробок передач транспортных средств большой мощности, устройство плавного включения снабжено клапанами плавност / сливного типа по числу фрикционов коробки передач и вторым
постоянным запоминающим устройством, причем входы клапанов плавности соединены с поршневыми полостями гидроцилиндров соответствующих фрикционов, а выходы - с сливом, регулятор давления выполнен дискретного типа и включает по
крайней мере три двухлинейных двухпозиционных электромагнитных клапана, выход,ные гидролинии которых соединены со
сливом, а входные гидролинии через соотг
ветствующие дроссели связаны с общей гидролйнией регулятора, которая соединена с полостями настройки клапанов плавности и через дроссель - с магистралью постоянного давления устройства переключения передач, вхо; чтения первого запоминающего устройства связан с третьим входом блока управления, четвертый вход блока управления соединен с- информационным выходом второго запоминающего устройства, адресные входы и вход чтения которого связаны с первыми выходами блока управления, вторые выходы которого соединены через усилители мощности с обмотками управления соответствующих электромагнитных клапанов регулятора давления..
общей гидролинией регулятора давления.
Ф
31
с
Поступление иа пере лю1/емие fjepedat/u
Ci/i/ma/тгб из ЛЗУ 35 номер (//7pffSjfTeHi/A
/7р1/нялг7& oAfep
/lofffffntf с1/гнамь/ HOAfe/Jo за/fa/ a е/лро енс/я t/ сло&а Hff С7фес е /е f73y 36
Счито/ле, из /731/Jff нам инсг1(ци B/ M7i/ef f e /jf /(лс7лано JO
Подать с1/итоннб/е саЛЗУ 36 ci/ZHCMt i на ады t/c /f //ттелей MOUfHac/77i/ 37
O/77CVf//77a/77t l/ /77epSff
dpeMeffLf t равнб/Af /f
/ч
e/77
( STOP )
фиг.5
| Патент США№4611507 | |||
| кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
