Изобретение относится к области судостроения, в частности к способам управления судами с помощью рулей.
Известен способ управления судном, по которому руль поворачивают вокруг вертикальной оси в заданную сторону поворота судна и устанавливают с углом атаки в горизонтальной плоскости к набегающему потоку. Данный способ принят за прототип.
Недостатком известного способа является отсутствие возможности управления судном без хода, а также недостаточная надежность, а в ряде случаев полное отсутствие возможности управления судном при движении на переднем склоне попутной волны или при волнении с кормовой четверти, что приводит к брочингу и нередко сопровождается переворотом и гибелью судна.
Целью изобретения является обеспечение управляемости судна при волнении с любых курсовых углов как на ходу, так и без хода, предотвращение брочинга, а также обеспечение возможности получения тяги (упора) за счет энергии морских волн.
Сущность изобретения заключается в том, что согласно способу управления судном, по которому руль поворачивают вокруг вертикальной оси в заданную сторону поворота судна и устанавливают с углом атаки в горизонтальной плоскости к набегающему потоку, руль дополнительно поворачивают вокруг горизонтальной оси и плоскость руля устанавливают с углом атаки в вертикальной плоскости к набегающему потоку. Кроме того, при управлении судном на продольном волнении горизонтальную ось поворота руля предварительно ориентируют перпендикулярно диаметральной плоскости (ДП) судна.
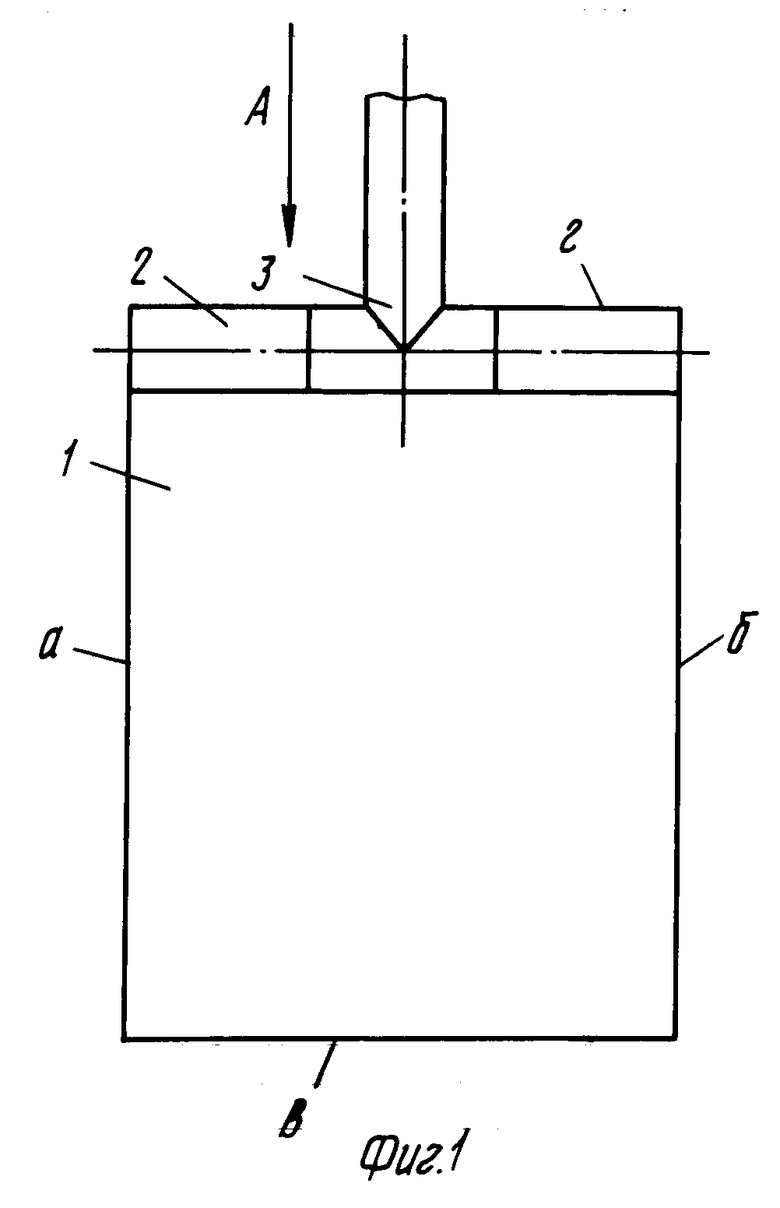
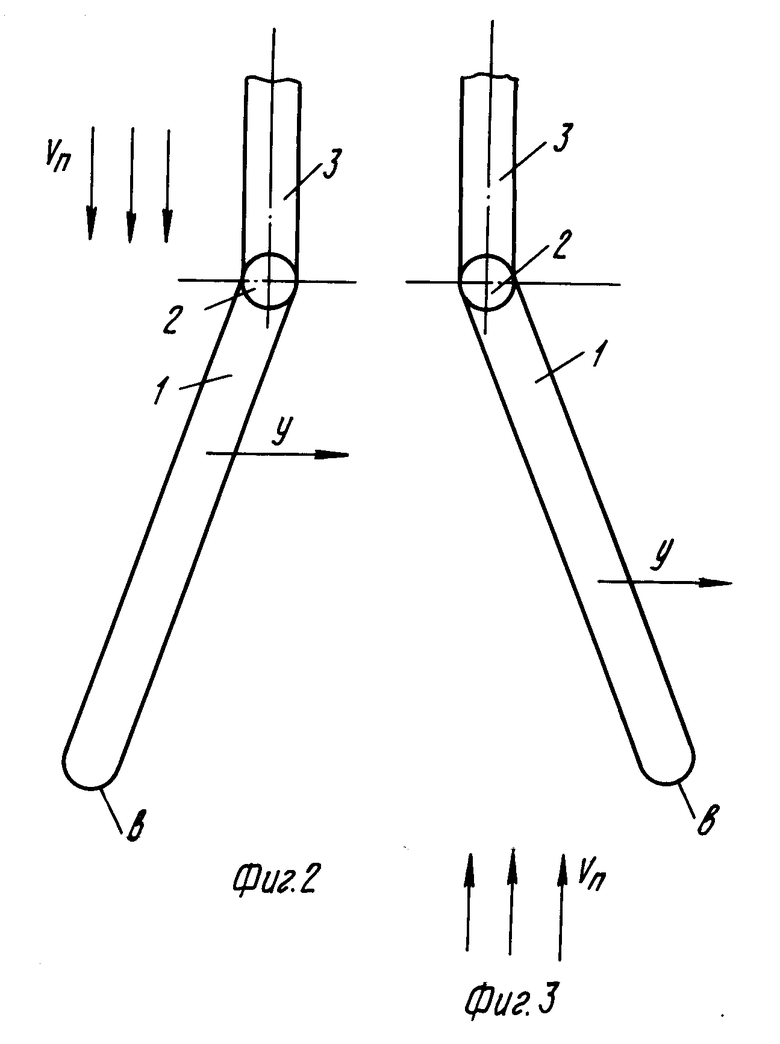
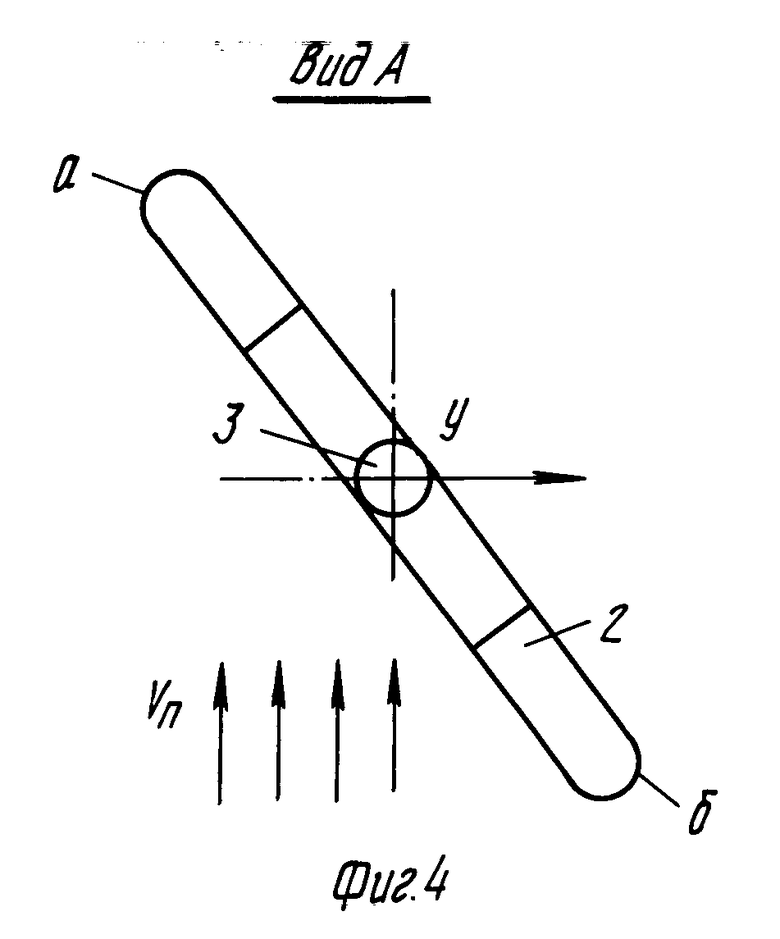
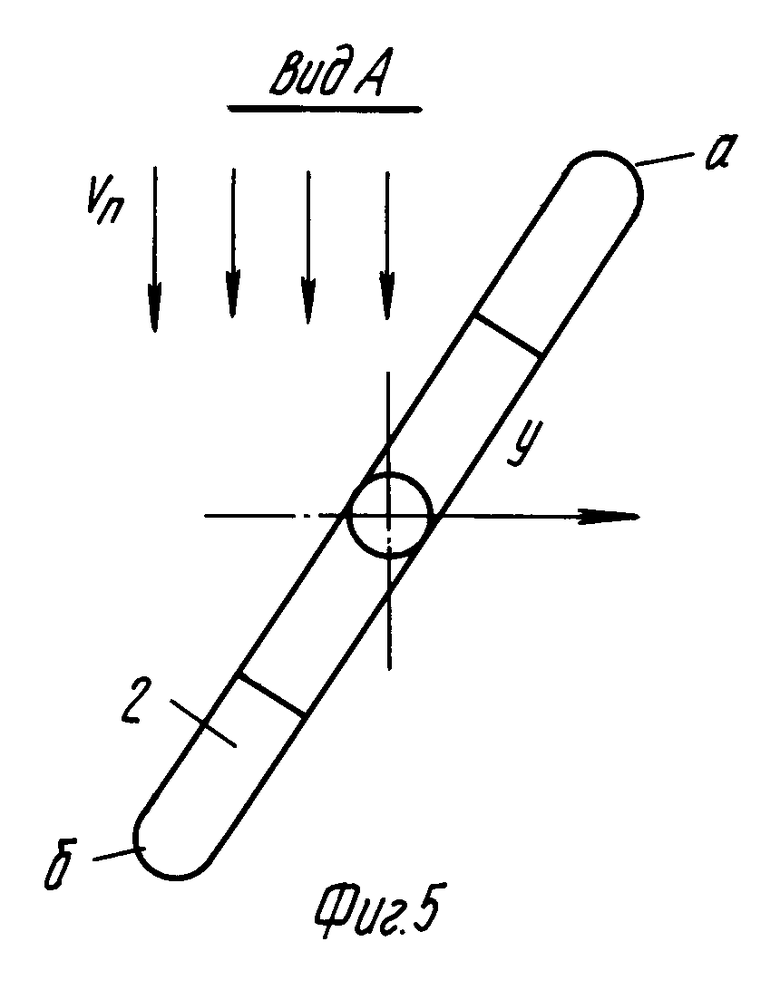
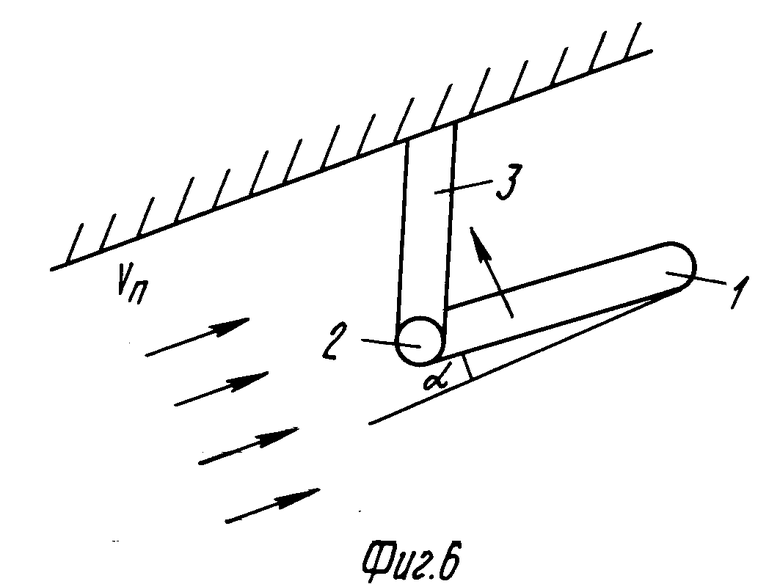
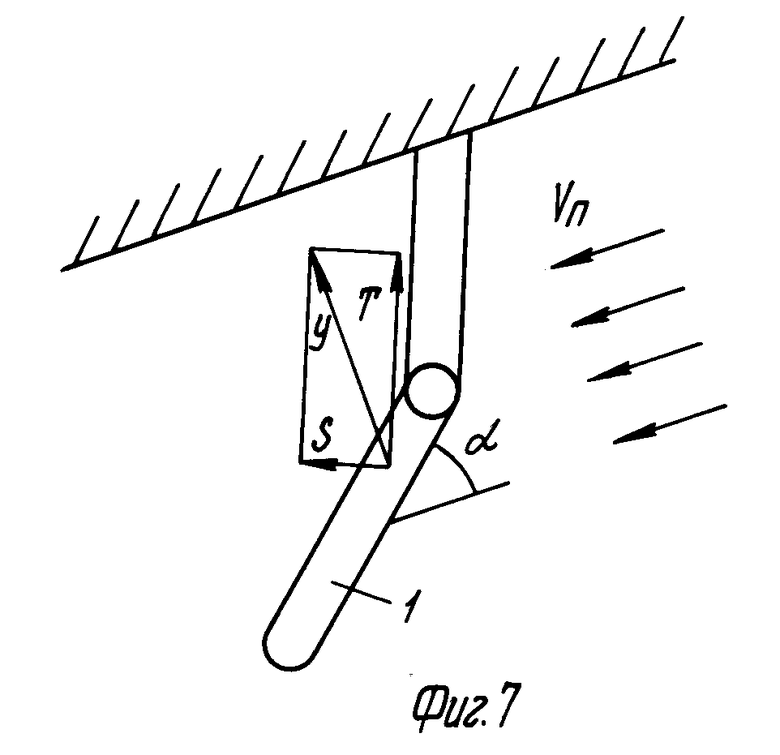
На фиг. 1 изображен руль судна; на фиг. 2 - положение руля, обеспечивающее поворот оконечности судна, где установлен руль, вправо (направление набегающего потока - вниз); на фиг. 3 - то же (набегающий поток направлен вверх); на фиг. 4 - вид по стрелке А на фиг. 1 (направление набегающего потока - вперед); на фиг. 5 - то же (набегающий поток направлен назад); на фиг. 6 - руль установлен перпендикулярно ДП судна, набегающий поток направлен назад (встречный поток); на фиг. 7 - то же, набегающий поток направлен вперед (попутный).
Управление судном при отсутствии волнения аналогично управлению судном, описанным в прототипе.
При волнении управление судном на ходу осуществляют поворотом руля 1 вокруг оси шарнира 2 при направлении вектора набегающего потока с верхних или нижних секторов или поворотом его вокруг оси баллера 3 при направлении набегающего потока секторов, близких к горизонтальным, получая при этом подъемную силу Y, вектор которой или его большая составляющая направлены в сторону заданного поворота оконечности судна, где расположен руль.
В случае продольного волнения или волнения в секторах, близких к ДП судна, плоскость руля устанавливают перпендикулярно ДП и, отклоняя от вертикали и устанавливая его с углом атаки к набегающему потоку, получают дополнительную тягу, направленную в сторону движения судна за счет энергии морских волн (фиг. 6, 7). При попутном направлении набегающего потока руль устанавливают перпендикулярно потоку. При этом он работает как подводный парус.
При стоянке судна на волнении управление по курсу осуществляют аналогично описанному. Набегающий на руль поток в этом случае обусловлен только перемещением воды на волнении, т. е. заданные повороты судна осуществляются только за счет энергии морских волн.
Для управления курсом судна на волнении без хода, руководствуясь показаниями датчика параметров морских волн, который дает направление волны и направление вектора скорости при ее орбитальном движении в каждый текущий момент времени, плоскость руля 1 (фиг. 1) устанавливают в исходное положение, при котором она перпендикулярна фронту волны, и используют скоростной поток воды, обусловленный ее орбитальным движением при волнении, ориентируя руль в каждый текущий момент времени относительно вектора скорости набегающего потока Vп в данный текущий момент времени при отсутствии необходимости поворота оконечности судна, где находится руль, перпендикулярно фронту волны, т. е. так, что плоскость руля находится в плоскости набегающего потока, а при необходимости поворота или доворота судна на заданный курс плоскость руля устанавливают с углом атаки к текущему значению вектора скорости набегающего потока Vп, который в данном случае обусловлен только орбитальными движениями воды и скоростью поворота судна по курсу.
Для поворота судна, идущего или стоящего перпендикулярно фронту волны, например, вправо той оконечностью, где расположен руль 1, при направлении Vп сверху вниз входную кромку руля 1, в данный момент кромку г, с помощью силового шарнира 2 поворачивают (смещают) вправо относительно нижней кромки в (фиг. 2). При направлении Vп снизу вверх поворачивают в сторону поворота оконечности судна кромку в, которая в данный момент будет входной (фиг. 3).
При направлении Vп сзади в сторону поворота оконечности судна поворачивают кромку б, а при направлении Vп спереди - кромку а.
Во всех перечисленных случаях подъемная сила Y (сила Жуковского) направлена вправо, разворот оконечности судна, где расположен руль, осуществляется вправо.
Для получения тяги (упора) за счет энергии морских волн при таком направлении морских волн ось силового шарнира 2 поворачивают с помощью силового привода баллера 3 на перпендикуляр к ДП судна и с помощью силового шарнира 2 отклоняют плоскость руля на угол атаки α к набегающему потоку (фиг. 6, 7). При всех направлениях набегающего потока Vп, кроме направления горизонтально спереди, на руле получают подъемную силу Y, горизонтальная составляющая S которой направлена вперед, а вертикальная Т создает килевую качку.
Управление судном по курсу в этом случае может осуществляться либо аналогично описанному выше, либо поворотом вектора S - волновой тяги в заданную сторону поворота оконечности судна, где расположен руль.
При положении судна лагом к волне для получения волновой тяги руль 1 из положения, перпендикулярного к ДП, являющегося равновесным для судна, не имеющего хода, поворачивают и устанавливают с углами атаки к текущим значениям вектора Vп подобно описанному выше. Подъемная сила Y в этом случае будет направлена вперед, т. е. судно будет двигаться вперед (может и назад, если плоскость руля поворачивать на 180о по сравнению с показанным на фиг. 2-5).
Управление по курсу в этом случае осуществляют отклонением кромок а и б руля на неравные углы атаки.
Управление судном и получение при этом тяги на ходу осуществляют аналогичным образом, учитывая при этом, что вектор Vп в этом случае равен сумме векторов, прежде всего вектора скорости судна и вектора скорости орбитального движения воды в волне.
Управление судном и получение тяги за счет энергии морских волн как на ходу, так и без хода при курсовых углах, отличных от 0, 90, 180 и 270о, осуществляют одновременным поворотом руля вокруг оси баллера 3 и оси силового шарнира 2 с установкой с углом атаки к Vп. Входными кромками руля при этом будут те или иные смежные (боковая и верхняя или нижняя) кромки руля 1. (56) Шмаков М. Г. Рулевые устройства судов. Л. : Судостроение, 1968, с. 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЕ РУЛЕВОЕ УСТРОЙСТВО Ю.Ф.СЕНЬКИНА | 1991 |
|
RU2009962C1 |
| ВОЛНОВОЙ ДВИЖИТЕЛЬ СУДНА | 1991 |
|
RU2031054C1 |
| ГИДРОАЭРОДИНАМИЧЕСКОЕ СУДНО "ВЕТРОВОЛНОХОД" | 1992 |
|
RU2048387C1 |
| ВОЛНОВОЙ ДВИЖИТЕЛЬ | 1998 |
|
RU2142387C1 |
| ВОЛНОВОЙ ДВИЖИТЕЛЬ СУДНА | 2000 |
|
RU2183176C2 |
| ВОЛНОДВИЖИТЕЛЬНАЯ МАШИНА | 2000 |
|
RU2183177C2 |
| ВОЛНОВОЙ ДВИЖИТЕЛЬ | 1998 |
|
RU2147543C1 |
| ВОЛНОВОЙ ДВИГАТЕЛЬ-ДВИЖИТЕЛЬ | 1998 |
|
RU2143377C1 |
| ВОЛНОВОЙ ДВИЖИТЕЛЬ СУДНА | 1998 |
|
RU2143376C1 |
| ВОЛНОДВИЖИТЕЛЬНАЯ МАШИНА | 2000 |
|
RU2196071C2 |
Использование: судостроение, управление судном. Сущность изобретения: способ управления судном заключается в том, что руль поворачивают вокруг оси баллера в заданную сторону поворота судна и устанавливают с углом атаки в горизонтальной плоскости к набегающему потоку. Дополнительно руль поворачивают вокруг оси горизонтального шарнира и плоскость руля устанавливают с углом атаки в вертикальной плоскости к набегающему потоку. При управлении судном на продольном волнении горизонтальную ось поворота руля предварительно ориентируют перпендикулярно диаметральной плоскости судна. 1 з. п. ф-лы, 7 ил.
