Изобретение относится к акустической диагностике трубопроводов и может быть использовано в нефтяной, химической и газовой промышленности.
Известен способ определения местоположения источников акустической эмиссии, заключающийся в том, что на поверхности трубопровода по его длине через равные расстояния размещают преобразователи, регистрируют разность времени прихода сигналов акустической эмиссии, по которым определяют искомый параметр.
Наиболее близким к изобретению является способ определения местоположения источников акустической эмиссии в трубопроводах, заключающийся в том, что по длине трубопровода размещают преобразователи, регистрируют сигналы акустической эмиссии каждым преобразователем и определяют расстояние от источника акустической эмиссии до преобразователя с учетом разности времени прихода гармонических составляющих акустического сигнала с частотами f1 и f2, f1< f2 и групповыми скоростями С1 и С2 и мод нормальной волны с центральными частотами f1 и f2.
Недостатком известного способа является невозможность определения видов источников акустической эмиссии и снижение достоверности при изменении температуры среды в линейном объекте.
Целью изобретения является повышение информативности контроля и достоверности обнаружения источников акустической эмиссии на линейных объектах.
Это достигается тем, что в способе определения местоположения источников акустической эмиссии в трубопроводах, заключающемся в том, что по длине трубопровода размещают преобразователи, регистрируют сигналы акустической эмиссии каждым преобразователем и определяют расстояние от источника акустической эмиссии до преобразователя с учетом разности времен прихода гармонических составляющих акустического сигнала с частотами f1 и f2, f1 < f2 и групповыми скоростями С1 и С2 и мод нормальной волны с центральными частотами f1 и f2, преобразователи по длине трубопровода размещают парами на расстоянии, равном или меньшем зоны контроля одиночного преобразователя, и расстоянии между преобразователями, кратном отношению С1/f1, направление на источник акустической эмиссии (АЭ) определяют по последовательности прихода сигналов АЭ на преобразователи пары, суммируют сигналы каждой пары с частотой f1 без фазового согласования, а с частотой f2 - после фазового согласования, определяют разность времен прихода полученных сигналов, а вид источника АЭ оценивают по соотношению амплитуд частотных компонент f1 и f2 гармонических составляющих акустических сигналов.
Для повышения достоверности регистрируют температуру трубопровода, а фазовое согласование осуществляют обратно пропорционально величине температуры.
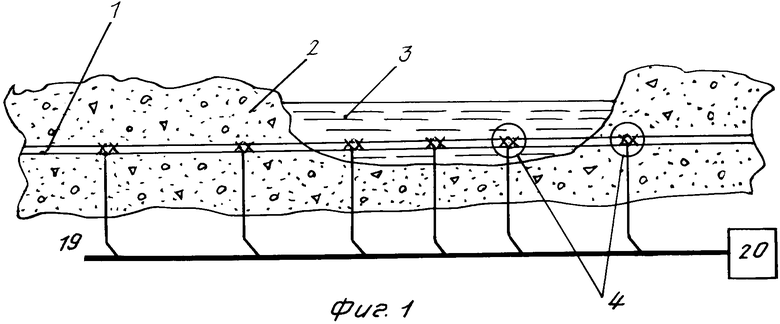
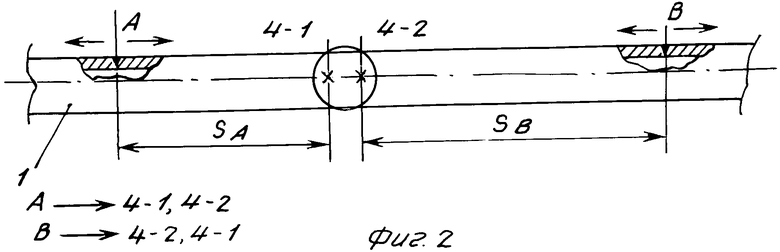
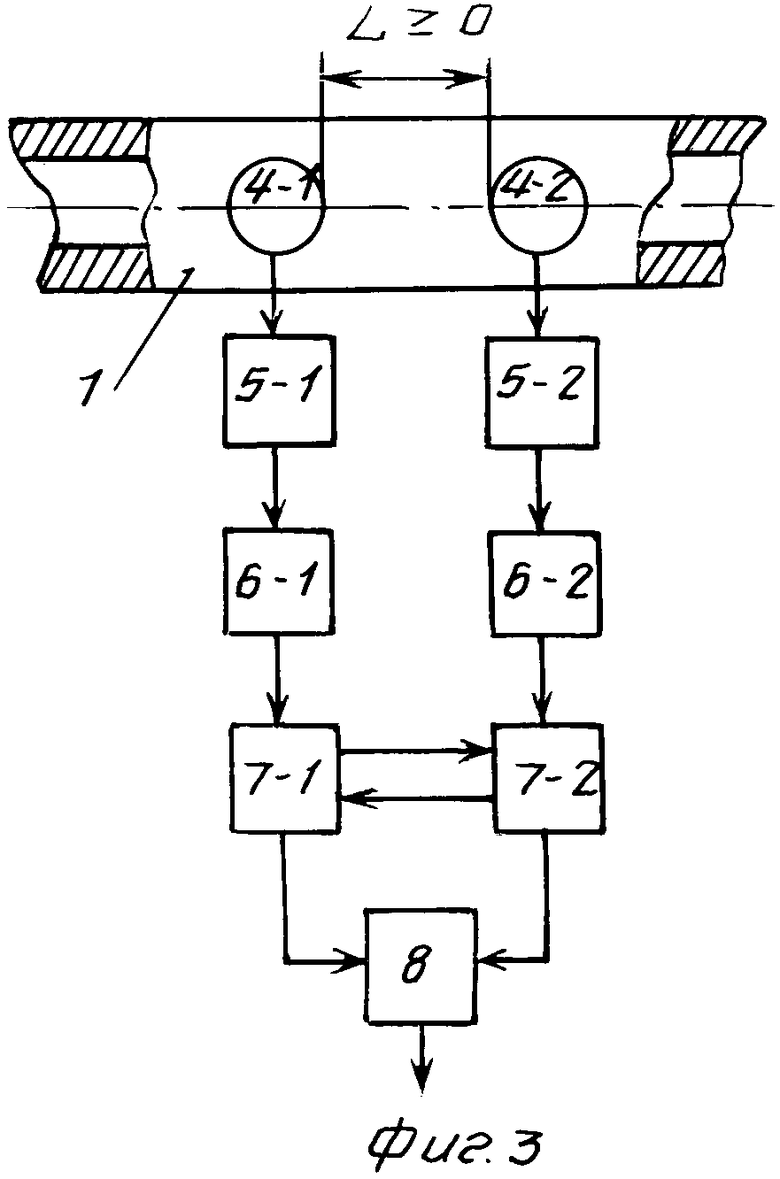
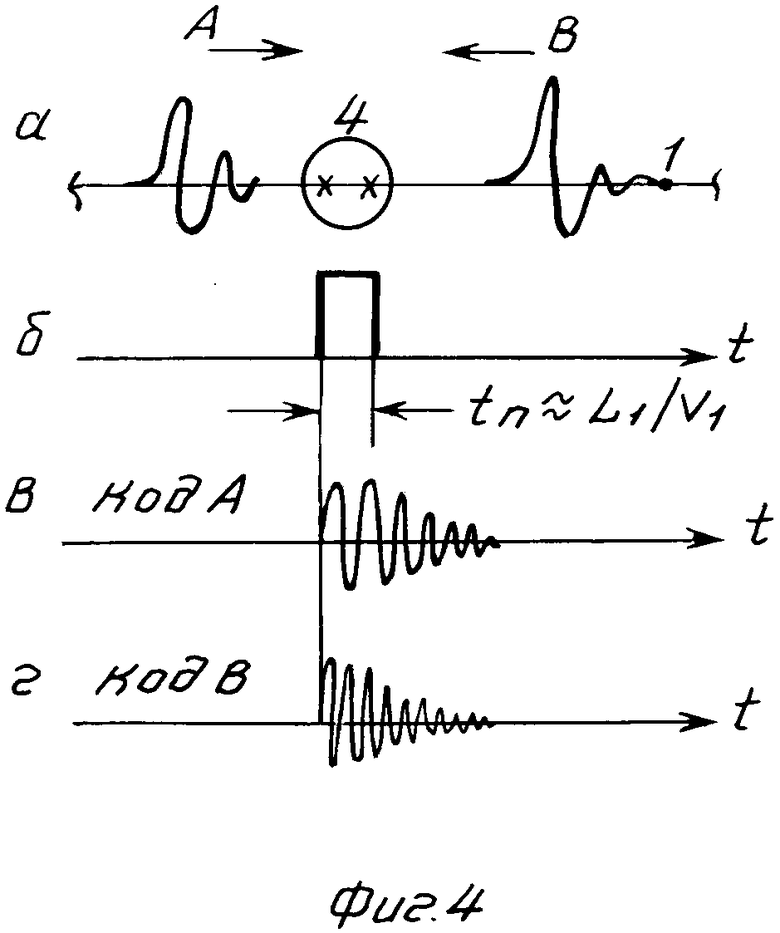
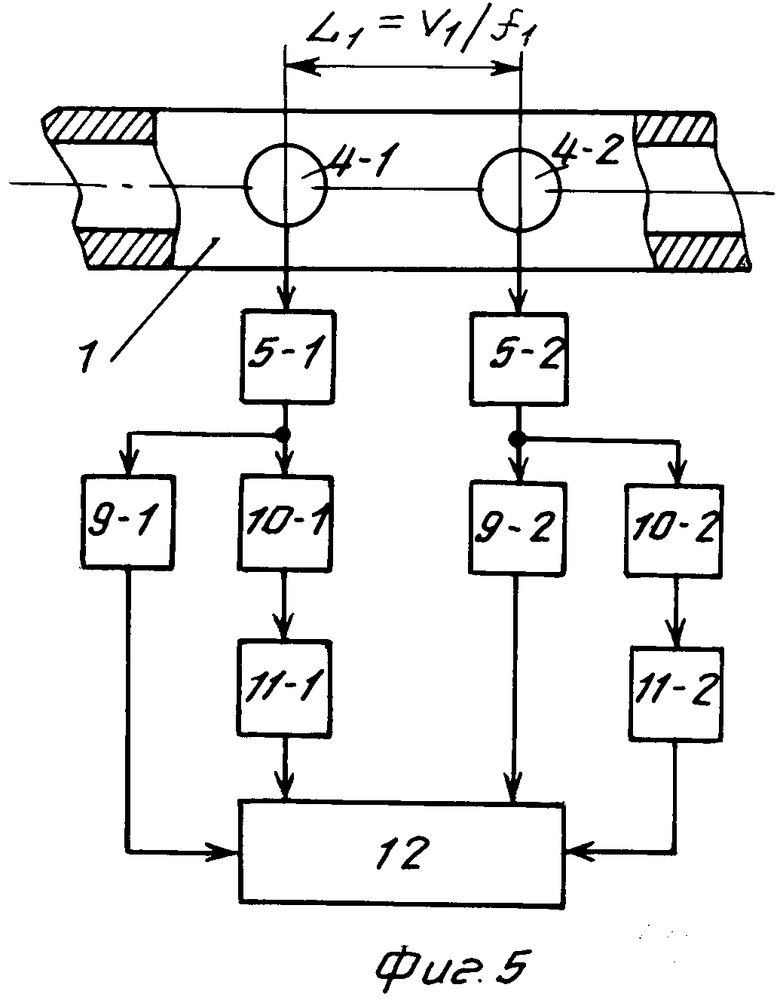
На фиг. 1 показана схема для осуществления способа; на фиг. 2 - расположение преобразователей пары на отрезке трубы и алгоритм определения с их помощью направления на дефект в трубной конструкции; на фиг. 3 - блок-схема определения преобразователями пары направления на дефекты в трубопроводе; на фиг. 4 - временные диаграммы к фиг. 2 и 3; на фиг. 5 - блок-схема фазового согласователя акустических сигналов; на фиг. 6 - временная диаграмма редких электрических импульсов, воздействующих на преобразователи пары; на фиг. 7 - блок-схема устройства, реализующего подачу этих импульсов на преобразователи пары; на фиг. 8 - модули огибающей 0 откликов, принятых преобразователями соседних пар.
На чертежах приняты следующие обозначения: 1 - участок магистрального трубопровода; 2 - подземный участок трубопровода; 3 - подводный участок трубопровода, 4 - преобразователь, 5 - усилитель, 6 - компаратор, фиксатор 7 напpавления, 8 - кодировщик, 9 - фильтр f1частоты, 10 - фильтр f2 частоты, 11 - фазовращатель, 12 - сумматор, 13 - диод, 14 - буферный усилитель, 15 - ударный генератор, генератор 16 импульсов, 17 - счетчик, 18 - линия задержки, 19 - кабельная линия связи, блок 20 обработки и регистрации.
Способ заключается в следующем.
На внешней поверхности по длине трубопровода 1 (см. фиг. 1-3 и 5) вдоль образующей трубы попарно размещают преобразователи 4(4-1, 4-2, . . . 4-(N-1), 4-N) на расстоянии между парами, равном или меньшем зоны контроля одиночного преобразователя, а между преобразователями пары - равном или большем нулевого зазора между ними.
Это позволяет с учетом принятого акустического метода дальнометрии дефектов снизить объем земляных и подводных работ при размещении преобразователей 4 на подземных 2 и подводных 3 переходах магистральных трубопроводах вдвое, так как теперь одна раскопка грунта (подводная работа) приходится не на один преобразователь, как ранее, а сразу на пару в связи с относительной малостью величины зазора (L ≅1,0 м) между образующими пару преобразователями, при этом расстояние между парами соответствующе превосходит аналогичный показатель прототипа.
Размещение преобразователей 4 вдоль образующей трубы помимо минимизации объема раскопок, например в случае, когда пара расположена в верхней части заглубленного в грунт трубопровода 1, способствует сокращению необходимых монтажных операций. Это достигается изготовлением специального несущего элемента (на чертежах не показан) в виде направляющей, на которой зафиксированы преобразователи 4 пары, и оптического визирования этого элемента перед закреплением его на трубопроводе вдоль образующей цилиндра трубы. Закрепление может выполняться клеевым, винтовым или замковым соединением.
Размер зоны контроля одиночного преобразователя, зависящий от типа и условий прокладки трубопроводов, практически всегда может быть найден экспериментально. Возможен следующий подход. При стендовой обработке метода диагностики в стенке трубы выполняется имитатор дефекта - эталонное сквозное отверстие, например, с диаметром сверления 0,7-1,2 мм. То же достигается врезкой в стендовую трубу сливных клапанов (кранов) с переменным или калиброванным по размеру сечением. Перемещая относительно минимального имитатора по длине трубопровода один из преобразователей пары, фиксируют такое его положение, когда он еще регистрирует акустический сигнал непрерывного ультразвукового поля, возникающего при истечении жидкости или газа под давлением через несплошность.
Величина давления рабочей среды для стендового трубопровода устанавливается, например, исходя из эксплуатационного давления в реальном объекте. Измеряют расстояние от имитатора до зафиксированного положения преобразователя по длине трубопровода. Удвоенную величину этого расстояния принимают за искомую зону контроля, так как преобразователь может принимать акустические сигналы от дефектов трубопровода по обе стороны от своего местоположения на нем.
Вместе с тем величина контроля неразрывно связана с амплитудно-частотной характеристикой преобразователя и трубопровода, представляющих собой в сборе своеобразную акустическую антенную систему. Ее параметры определяются исходя из акустических спектров значимых меха- низмов повреждения диагностируемой конструкции, потерь акустической энергии по длине и пропускной способности волновода как акустической линии связи, а также характеристик внешних и внутренних шумов, присущих подобным системам.
С точки зрения практической диагностики металлических трубопроводов магистрального типа диаметром до 1200 мм и толщиной стенки до 20 мм наиболее подходящим диапазоном частот приема акустических колебаний от трещин и утечек конструкции для зоны контроля порядка 200 м является интервал от 15 до 35 кГц. Для него потери акустической энергии в нефтезаполненных трубопроводах оцениваются величиной 0,29 дБ/м.
Выполнив указанное размещение, регистрируют преобразователями 4 акустические сигналы с трубопровода 1.
По последовательности регистрации акустического сигнала, в том числе сигнала АЭ, преобразователями пары (см. фиг. 2), например 4-1, 4-2, находят направление на дефект. Так, для трещины А, находящейся на фигуре от этой пары в плане слева, алгоритм срабатывания преобразователей: А -> 4-1, 4-2. Для трещины В, находящейся в плане справа, процедура будет обратная, т. е. В -> 4-2, 4-1.
Таким образом, для пары преобразователей снимается неопределенность положения дефекта на трубопроводе. Данный алгоритм может быть реализован устройством с блок-схемой на фиг. 3. Временные диаграммы для его работы показаны на фиг. 4.
Функционирует устройство, например, для случая А следующим образом. Упругий импульс (в данном примере сигнал АЭ), распространяясь от подрастающей усталостной трещины по телу трубопровода, первым достигает преобразователя 4-1 пары. Преобразуется им в электрический сигнал (см. диаграмму А), усиливаемый электронным усилителем 5-1, и с помощью компаратора 6-1 взводить фиксатор направления 7-1 (см. диаграмму Б). При этом формируется импульс блокировки, временно запирающий другой фиксатор направления 7-2. Через интервал времени L/V1, определяемый зазором между преобразователями пары и скоростью распространения упругого импульса в материале трубы, аналогичные преобразования происходят в цепочке 4-2. . . 6-2, что вызывает возвращение фиксатора направления 7-1 в исходное состояние. Одновременно импульс блокировки снимается. Кодировщик 8 под действием того или иного фиксатора направления вырабатывает соответствующий кодированный сигнал (см. диаграмму в, н). Параметры этого сигнала (например, частота заполнения радиоимпульса с экспоненциальным спадом, его полярность и др. ) несут однозначную информацию о направлении прихода упругого импульса.
После нахождения преобразователя пары направления на дефект расстояние до него по длине трубопровода вычисляют из соотношения:
S = ΔT˙V1˙ V2/| V1 - V2| (1) где Δ Т - разность времен прихода частотных компонент f1, f2 из спектра акустического сигнала на сработавшем в паре преобразователе; V1, V2 - групповые скорости волновых пакетов с центральными частотами f1 и f2. До проведения этих вычислений, осуществление которых возможно аппаратурой 20 (см. фиг. 1) в реальном масштабе времени, величины, входящие в формулу (1) справа, находятся экспериментальным путем в 2 этапа.
Физически возможность определения данного расстояния указанным образом объясняется тем, что в дисперсных волноводных системах (трубопровод - именно такая система) волновые пакеты с различными центральными частотами распространяются с неодинаковыми фазовыми и групповыми скоростями, что подтверждается известным из практики физической акустики фактом изменения формы и амплитуды упругого импульса в зависимости от пройденного им в среде распространения, в частности в твердом теле пути. Поэтому один и тот же путь волновые пакеты с различными центральными частотами пройдут за разное время, что с учетом величин групповых скоростей каждого пакета позволяет произвести необходимые вычисления.
На первом этапе определяют групповые скорости V1, V2 волновых пакетов с центральными частотами f1 и f2 например, из указанного диапазона 20 и 30 кГц, соответственно. Преобразователи на эти частоты включают по схеме излучатель-приемник и устанавливают на нормированном расстоянии друг от друга по длине трубопровода. Измеряют с их помощью время распространения ультразвуковых импульсов с центральными частотами f1 и f2. Из этих данных выходят скорости V1 и V2 например, для упругой волны продольного типа. После этого вычисляют коэффициент V1 - V2/| V1 - V2| (может иметь по участкам трубопровода индивидуальные значения) и заноситься в память ЭВМ аппаратуры 20. Вследствие последней операции при расчете основной величины снижаются временные затраты машинного счета и увеличивается разрешающая способность способа по темпу обработки поступающей информации. Изложенные действия могут осуществляться заблаговременно, например, на стадии исследований или обработки метода диагностики, могут быть частично совмещены с уже описанным определением зоны контроля одиночного преобразователя.
На втором этапе, объединяющем текущие измерения временного интервала ΔТ с переложением его величины в "память" и последующем умножении на значение найденного выше коэффициента, в аппаратуре 20 (см. фиг. 1) завершается определение расстояния (см. фиг. 2) по длине трубопровода между сработавшим в паре преобразователе и источником (дефект), вызвавшем появление акустического сигнала. При этом ошибка в определении расстояния может быть менее того же показателя прототипа. Это следует из того, что в одномерных системах предложенный метод указания положения при измерении расстояния до источника нуждается всего в одном преобразователе, в то время как известный обязательно в двух. Причем последние значительно разнесены в пространстве ( ≈100 м) и, следовательно, находятся в неидентичных условиях по температуре, влажности, акустическому контакту и другим эксплуатационным показателям.
Для акустических сигналов ближнего и возможно среднего поля данная методика измерения может быть частично упрощена, так как распространение упругих колебаний в трубопроводе происходит в двух средах, обладающих разными скоростями распространения волн. Это означает, что если на преобразователе пары от действия одного источника (генерирующего упругие колебания) возникает два разделенных во времени импульса, то может быть применена формула (1). В ней в качестве V1используют скорость распространения ультразвука для конструкционного материала трубы, а в качестве V2 - скорость распространения ультразвука в продукте. При этом сохраняется возможность применения основной методики и, следовательно, надежность способа увеличивается. Кроме того, указанное упрощение позволяет качественно оценивать положение источника сигнала по длине участка трубопровода. Оценивание возможно, например, по результатам анализа счета импульсов, поступающих с преобразователей пары за некоторый интервал времени. Этот интервал выбирается таким образом, чтобы в пространственном отношении являть собой аналог упомянутого поля преобразователей. Перспективен и корреляционный подход, не требующий статистического анализа. Для диагностики это обеспечивает наблюдение за кольцевыми сварными швами трубопровода без привлечения сложных технических решений, а при дополнении преобразователей пары надлежащей электроникой понижает поток обмена информацией с аппаратурой 20. Кроме того, может быть весьма полезным при ее дежурном режиме работы. Однако обе методики (как и прототип) нуждаются в учете изменения скорости звука от температуры и давления транспортируемого в трубопроводе продукта (обычно для газа), хотя эти параметры стремятся поддерживать постоянными.
В практическом отношении местоуказание источника производится отсчетом вычисленного расстояния от картографического положения или отметки на местности данной пары преобразователей в сторону найденного ими направления на дефект по длине трубопровода. При этом верность прохождения по трассе прокладки трубопровода в случае отсутствия его видимости может контролироваться, например, бесконтактным металлоискателем.
Если в качестве преобразователей пары применены пьезодатчики с частотами толщинного и радиального резонанса, равными f1 и f2 (f1 < f2), то тогда зазор L1 между преобразователями в паре устанавливают из соотношения L1 = V1/f1, что, например, для скорости звука по стали V1 = 5600 м/c и частоты f1 = 20 кГц дает расстояние L1 = 0,28 м. Полученные в этом случае с преобразователей пары акустические сигналы смешивают, например, путем когерентного сложения, предварительно подвергая по частоте f2 фазовому согласованию в диапазоне углов от 0 до 180о. Фазовое согласование нужно в связи с тем, что зазор L1 не оптимизирован относительно частоты f2. Все это позволяет повысить относительно прототипа чувствительность приема акустических сигналов примерно в  раза и при этом сократить вдвое потребность в дефицитном коаксиальном кабеле 19 (см. фиг. 1), которым преобразователи связываются с аппаратурой 20 (см. там же). Последнее объясняется тем, что роль смесителя сигналов с преобразователей пары может выполнить один коаксиальный кабель.
раза и при этом сократить вдвое потребность в дефицитном коаксиальном кабеле 19 (см. фиг. 1), которым преобразователи связываются с аппаратурой 20 (см. там же). Последнее объясняется тем, что роль смесителя сигналов с преобразователей пары может выполнить один коаксиальный кабель.
Можно показать, что отмеченное повышение чувствительности в рамках выбранного частотного диапазона, параметров и при отсутствии их коррозии и малого оттока акустической энергии в грунт и отводы конструкции эквивалентно дополнительному увеличению зоны контроля одиночного преобразователя примерно на 30 м. Лучших показателей можно достичь, если в пару будет входить большее число преобразователей - 3,4 и т. д.
Устройство (см. фиг. 5) работает следующим образом. Рассматриваем случай А (см. фиг. 9). Упругий импульс первым достигает пьезодатчика 4-1, преобразуется им в электрический сигнал, усиливаемый электронным усилителем 5-1, и селектируется по частоте f1 полосовым фильтром 9-1, по частоте f2 - полосовым фильтром 10-1. Фазовращателем 11-1 устанавливают угол, например, на стадии обработки метода диагностики, компенсирующей некогерентное сложение частотной компоненты f2 импульса при поступлении его со стороны пьезодатчика 4-2. Цепь, принадлежащая этому пьезодатчику, работает аналогично. Сигналы с цепочек смешиваются в сумматоре 12, роль которого может выполнить коаксиальный кабель 19. Для случая В последовательности работы цепочек во времени меняется местами.
Определяя непрерывность частотных компонент f1, f2 (одной, либо двух) акустического сигнала выявляют сквозную несплошность стенки трубопровода, что важно при транспортировке опасных продуктов (аммиак, ШФЛУ и т. д. ), так как позволяет заблаговременно предотвращать возможное неблагоприятное развитие событий. Такое определение основано на том, что при истечении газа или жидкости под давлением через несплошность возникает, непрерывное ультразвуковое поле, имеющее флуктуирующий характер. Упругие волны от этого поля, принятые резонансной системой преобразователей пары, дополнительно сглаживаются фильтрами 9-1, 9-2, 10-1, 10-2, и на электрическом выходе смесителя 12 образуется процесс, близкий к эргодическому.
Непрерывность частотных компонент может быть найдена, например, организацией нескольких жестко связанных между собой временных выборок, при этом определяющим признаком является обязательное наличие в каждой из них информативного сигнала. Так, для исключения временной корреляции с АЭ явлениями при трещинообразовании в стальных трубопроводах целесообразно организовать 4-7 выборок с шагом через 1 с. Вероятность попадания в выборки стахостических импульсов АЭ будет чрезвычайно мала. Как показывают расчеты для длительности импульса 10-3с и 5 выборок, она не превысит величины 10-15.
Оценивая относительные амплитуды частотных компонентов f1 и f2между собой, судят в сопоставлении с тарировочной зависимостью об эквивалентном размере утечки. Эта зависимость устанавливается при определении контрольной зоны одиночного преобразователя. При этом фиксируются относительные амплитуды для каждого размера отверстия, имитирующего ту или иную величину утечки. Измерение амплитуд акустических сигналов может осуществлятьcя АЦП, имеющимися в составе аппаратуры 20.
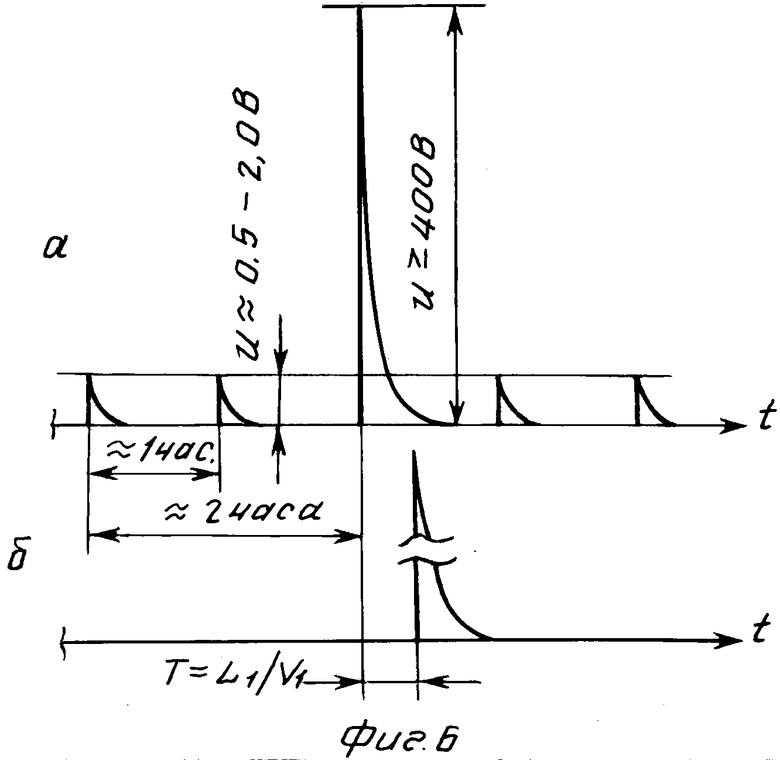
Подавая на один из преобразователей пары последовательность редких электрических импульсов, отклик которых принимают другим преобразователем из этой пары через интервал времени Т = L/V1, преследуют цель контроля работоспособности, а также акустического контакта преобразователей с трубопроводом 1. При этом амплитуда редких электрических импульсов (см. фиг. 6, диаграмму а) может быть невысокой, например, 0,5-2,0 В, так как расстояние между образующими пару преобразователями мало (1,0 м), соответственно малы на этом расстоянии в сталях потери акустической энергии, а также "мертвое время", занятое распространением в них отклика. Таким образом не создаются помехи в работе преобразователям соседних пар, поэтому достоверность диагностики трубопровода резко повышается, а вероятность пропуска полезной информации остается низкой.
Для трубопроводов характерны разнообразные внешние условия. Некоторые из этих условий, в основном температура, оказывают влияние на расстояние между преобразователями и скорость распространения ультразвуковых колебаний в материале трубы. Оба этих фактора для трубных сталей действуют таким образом, что с увеличением температуры время распространения акустических импульсов в трубе растет. В этой связи несколько нарушается введенное ранее фазовое согласование акустических сигналов с преобразователей пар. Поэтому регистрация акустических импульсов в трубе растет. В этой связи несколько нарушается введенное ранее фазовое согласование акустических сигналов с преобразователей пар. Поэтому регистрация температуры трубопровода, определение ее величины и коррекция фазового согласования сигналов обратно пропорционально величине температуры стального трубопровода, что способствует повышению точности способа. В свою очередь, это улучшает его эксплуатационные показатели, расширяющие географию применения метода диагностики для нефтегазовых промыслов районов Сибири и Крайнего Севера.
Регистрация температуры и оценка ее величины могут выполняться, например, по параметрам отклика, возникающего при подаче на один из преобразователей пары редких электрических импульсов. В этом отношении возможно использование как тарировочной зависимости форма отклика - температура участка трубы, как и измерение собственных шумов преобразователя. При измерении собственных (тепловых) шумов преобразователей другие получаемые с него сигналы исключают, например, путем их амплитудного ограничения, а также большой постоянной времени интегрирования.
Далее увеличивают силу каждого n-го импульса в последовательности редких электрических импульсов, например каждого 3-го (см. фиг. 6, диафрагму в). Принимают его отклик дополнительно преобразователями соседних пар и сопоставляют между собой параметры отклика, полученные на преобразователях этих пар. Это позволяет аппаратурой 20 осуществлять контроль и при необходимости регулировать или поддерживать постоянным состояние акустического коэффициента передачи участков трубопровода. Кроме того, наблюдать за развитием некоторых дефектов конструкции, например трещин, направленных преимущественно вдоль кольцевых швов и межзеренной коррозии металла трубопровода.
Потребность в стабильном акустическом коэффициенте передачи неразрывно связана с циклическими изменениями погодных условий на трассе продуктопровода, так как изменяющиеся влажность и температура окружающей среды ведут к разным величинам оттока акустической энергии из волноводной системы поскольку меняются условия на ее внешней границе. Стабильность этого коэффициента может быть обеспечена путем регулирования по параметрам откликов коэффициента передачи (усиления) электронного тракта аппаратуры 20.
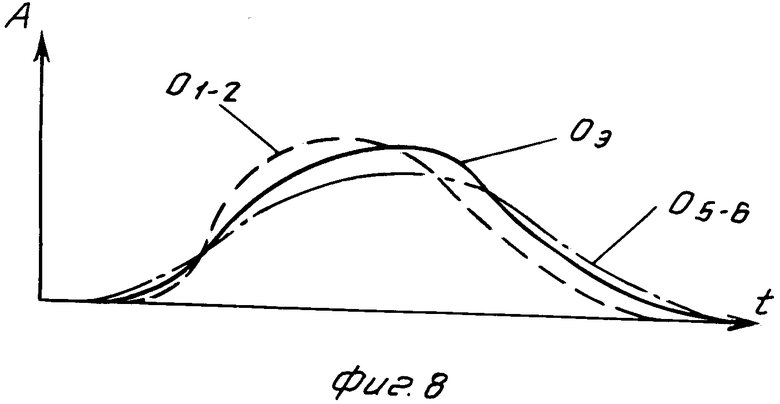
Анализ отклика может осуществляться по характеристикам формы его огибающей (амплитуда, крутизна фронта и спада, наличие "горбов" и т. п. для примера см. фиг. 8) или путем представления этой временной функции в частотной области. И в этом и другом случае используется математический аппарат теории распознавания образов. Эталонные копии для сравнения огибающих получают из экспериментальных исследований и хранят их в памяти аппаратуры 20. Например, записывают оцифрованные функции в оперативное запоминающее устройство ЭВМ, а в нужный момент времени выводят на компаратор (на чертежах не показано).
Вместе с тем, по истечении интервала времени Т после начала подачи на один из преобразователей пары n-го импульса (или группы импульсов), для дополнительного повышения точности контроля и диагностики, подают аналогичный импульс (или группу) на второй преобразователь этой пары. Таким образом производится временное согласование возбуждения резонансных преобразователей акустически излучающей антенной системы. Мощность ее повышается примерно в 4 раза и возрастает соотношение сигнал-шум при измерении откликов на преобразователях соседних пар.
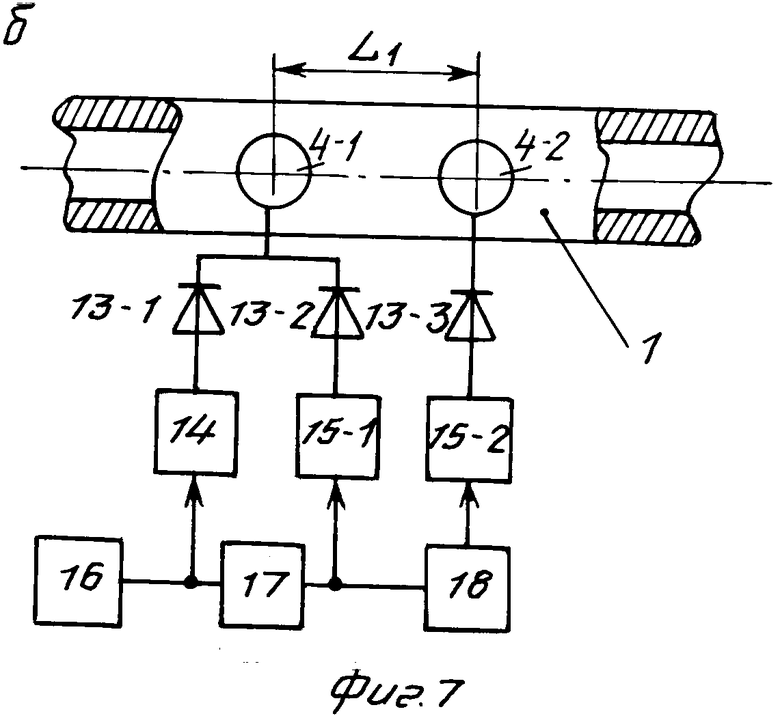
Устройство (см. фиг. 7) работает следующим образом. Выдающий генератор 16, например кварцевого типа вырабатывает низкоамплитудные редкие электрические импульсы (см. фиг. 6 диафрагму - а), которые поступают на счетчик 17, а также через буферный усилитель 14 и диод 13-1 - на преобразователь 4-1. Последний излучает в отрезок трубопровода 1 ультразвуковые импульсы для контроля и диагностики технического состояния всей системы, диод 13-1 в определенное время исключает шунтирование пьезопреобразователя 4-1 низким выходным сопротивлением буферного усилителя 14, счетчик 17 выделяет n-ые редкие импульсы благодаря возможности изменения коэффициента пересчета.
Выделенные импульсы запускают ударные генераторы (U≥400 в) 15-1 и 15-2, причем запуск одного генератора относительно другого запаздывает во времени (см. фиг. 6 диафрагму б) на величину Т = L/V1, что достигается с помощью электрической линии задержки 18. Диоды 13-2 и 13-3 выполняют уже отмеченные функции. Преобразователи пары генерируют высокоамплитудные синхронированные во времени акустические колебания, которые при распространении в волноводной системе трубопровода синфазно суммируются по частоте f1 и мощность их на данной гармонике примерно учетверяется. Длительность импульса ударного генератора при этом должна быть равна половине периода этой гармоники, т. е. Т/2. Для получения того же результата для второй гармоники, т. е. на частоте f2, длительность импульса ударных генеpаторов и время задержки запуска одного из них регулируют соответствующим образом.
Изменяя и фиксируя по заданному закону временные, амплитудные и частотные характеристики n-ных импульсов, отклики которых по-прежнему принимают преобразователями соседних пар, расширяют область применения технического решения путем придания ему возможностей для автоматизированной метрологической поверки за счет акустической имитации параметров дефектов без осуществления оперативного доступа к трубопроводу. Действительно, акустические аналоги параметров дефектов (тип, размер, местоположение) могут быть найдены экспериментальным путем и в виде тарировочных зависимостей храниться в "памяти" ЭВМ аппаратуры 20. С другой стороны, эти аналоги можно сконструировать изменением и фиксацией по заданному закону амплитудных и временных характеристик n-ных импульсов, причем таким образом, что для соседних пар преобразователей по отношению к излучающей паре неразличимо бы формировались акустические сигналы, сопутствующие реальным дефектам. Так, изменяя время между двумя парными n-ми импульсами (первая пара моделирует частотную компоненту f1, вторая - f2 из спектра, например, импульса АЭ от усталостной трещины) устанавливают имитатор в любое положение по длине участка трубопровода. Изменяя амплитуды и их соотношение для каждого значения РВП этих компонент имитируют, например, приращение длины усталостной трещины на каждом цикле испытаний, т. е. акте действия двух парных n-ых импульсов и т. д. Также можно имитировать эквивалентный размер утечки в конструкции, как было описано ранее. Таким образом, решается проблема ежегодной аттестации данного метода, без доступа к трубопроводу. Кроме того, по долговременным характеристикам откликов возникает возможность суждения о старении преобразователей с прогнозом последующий их работоспособности и планово-предупредительном ремонте или замене.
Преимущества способа могут дать заметный экономический выигрыш на сокращении в 2-3 раза объемов земляных и подводных работ при установке и съеме преобразователей на трубопроводах, аналогично при ремонте выявленных там дефектных отрезков за счет более точного в 1,5-1,8 раза местоуказания пораженного участка, исключении указанных работ при периодической поверке аппаратуры и метода диагностики, на 2-кратном уменьшении потребного количества коаксиального кабеля для связи преобразователей с аппаратурой или использовании его более дешевых сортов и, наконец, на уменьшении штрафных санкций за недопоставки продукции как в связи с уменьшением числа необоснованных остановок трубопроводов, так и парированием на них внештатных ситуаций за счет более надежного определения характеристик и оценок степени опасности дефектов конструкции. (56) Авторское свидетельство СССР N 1026049, кл. G 01 N 29/14, 1983.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ АКУСТИЧЕСКОЙ ЭМИССИИ С ИСПОЛЬЗОВАНИЕМ ОДНОГО ПРИЕМНИКА | 2009 |
|
RU2425362C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА АКУСТИЧЕСКОЙ ЭМИССИИ | 2011 |
|
RU2498293C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ ВОЛН ДАВЛЕНИЯ ТЕКУЧЕЙ СРЕДЫ ПО ТРУБОПРОВОДУ | 2010 |
|
RU2476763C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ПРЕОБРАЗОВАТЕЛЕМ И ИСТОЧНИКОМ АКУСТИЧЕСКОЙ ЭМИССИИ | 2007 |
|
RU2397490C2 |
| СПОСОБ ЛОКАЦИИ ДЕФЕКТОВ | 2013 |
|
RU2523077C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ПРЕОБРАЗОВАТЕЛЕМ И ИСТОЧНИКОМ АКУСТИЧЕСКОЙ ЭМИССИИ | 2002 |
|
RU2229121C1 |
| Способ выявления скрытых дефектов в композиционных материалах методом стоячих волн | 2023 |
|
RU2816673C1 |
| Способ идентификации источников акустической эмиссии | 2020 |
|
RU2737235C1 |
| Акустико-резонансный способ неразрушающего контроля трубопроводов | 2020 |
|
RU2739144C1 |
| СПОСОБ АКУСТИЧЕСКОЙ ОБРАБОТКИ ПРОДУКТИВНОЙ ЗОНЫ СКВАЖИНЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2162519C2 |
Изобретение относится к акустико-эмиссионной диагностике трубопроводов и может быть использовано в нефтехимической промышленности и коммунальном хозяйстве. Целью изобретения является повышение информативности контроля и достоверности обнаружения источников акустической эмиссии на линейных объектах. При осуществлении способа на трубопроводе размещают пары преобразователей, расстояние между которыми устанавливают кратным отношению скорости моды нормальной составляющей частотой f1 к величине этой частоты, а расстояние от источника до преобразователя определяют путем вычисления разности времен прихода акустических сигналов на преобразователи после проведения фазового согласования волновых пакетов с разнесенными центральными частотами f1 и f2. Причем коррекцию фазового согласования сигналов с частотами f1 и f2 производят с учетом температуры трубопровода. Вид источника акустической эмиссии оценивается по отношению амплитуд частотных компонент f1 и f2 гармонических составляющих акустических сигналов. 1 з. п. ф-лы, 8 ил.
