Изобретение относится к способам управления лентопротяжными механизмами аппаратов магнитной записи.
Известен способ управления остановкой лентопротяжного механизма (ЛПМ), реализованный в устройстве для защиты магнитной ленты (МЛ), по которому сравнивают питающее и эталонное напряжения, при снижения питающего напряжения ниже эталонного формируют сигнал "торможение", по которому из предварительно накопленной электрической энергии формируют встречное магнитное поле [1] .
Недостатком данного технического решения является низкая надежность. Во время работы перемещающий магнитную ленту ЛПМ накапливает во всех вращающихся узлах и деталях кинетическую энергию. Величина этой энергии зависит от скорости вращения узлов и их моментов инерции. При исчезновении питающего напряжения прекращается управление скоростью и, что особенно важно, натяжением магнитной ленты. Для исключения образования петель и замятий ленты необходима экстренная остановка ЛПМ. Во время торможения вся запасенная кинетическая энергия должна быть либо преобразована в тепло, либо скомпенсирована другой энергией. В известном способе использован второй вариант, который требует запаса в буферном накопителе энергии, равной рассеиваемой.
Использование данного способа для остановки МЛ при исчезновении питающего напряжения в больших и высокоскоростных лентопротяжных механизмах не обеспечивает их надежной защиты.
Наиболее близким по технической сущности и достигаемому результату является способ управления остановкой ЛПМ, при котором формируют эталонное напряжение, измеряют и сравнивают с ним питающее напряжение, при снижении питающего напряжения ниже эталонного формируют сигнал "Торможение" и производят остановку ЛПМ [2] .
Недостатком известного технического решения является низкая надежность. При отключении питающего напряжения остановка ЛПМ осуществляется за счет фрикционного торможения вращающихся узлов. Для обеспечения защиты магнитной ленты от механических повреждений величины фрикционных воздействий на вращающиеся узлы должны быть для каждого из них установлены индивидуально. Это связано с разным уровнем накопленных кинетических энергий. Практически обеспечить такие условия торможения, учитывая неравномерность коэффициента трения при изменения температуры и влажности, а также со сроком службы, невозможно. Экспериментальные исследования этого способа управления остановки ЛПМ показали, что при скоростях транспортирования ленты выше 1,5 м/с при снятии напряжения питания происходит замятие магнитной ленты.
Таким образом, известный способ управления остановки ЛПМ обладает низкой надежностью.
Целью изобретения является повышение надежности функционирования механизма при аварийном снижении питающего напряжения путем плавного снижения скорости движения магнитной ленты.
Для достижения цели в способе управления остановкой лентопротяжного механизма магнитофона, при котором в процессе работы электродвигателей ведущего и подающего узлов формируют эталонное напряжение, измеряют питающее напряжение и сравнивают его с эталонным, формируют сигнал "Торможение" при снижении питающего напряжения ниже эталонного, после чего осуществляют остановку магнитной ленты, при работе лентопротяжного механизма задают контрольное значение скорости движения магнитной ленты, после формирования сигнала "Торможение" суммируют абсолютные значения напряжений электродвижущей силы электродвигателей ведущего и подающего узлов, из суммарного напряжения формируют ток электродинамического торможения электродвигателей ведущего и подающего узлов которым производят торможение электродвигателей для снижения скорости движения магнитной ленты, измеряют скорость движения магнитной ленты, сравнивают ее с контрольным значением и при скорости движения, равной или меньшей ее контрольного значения, формируют сигнал "Стоп", по которому производят остановку магнитной ленты.
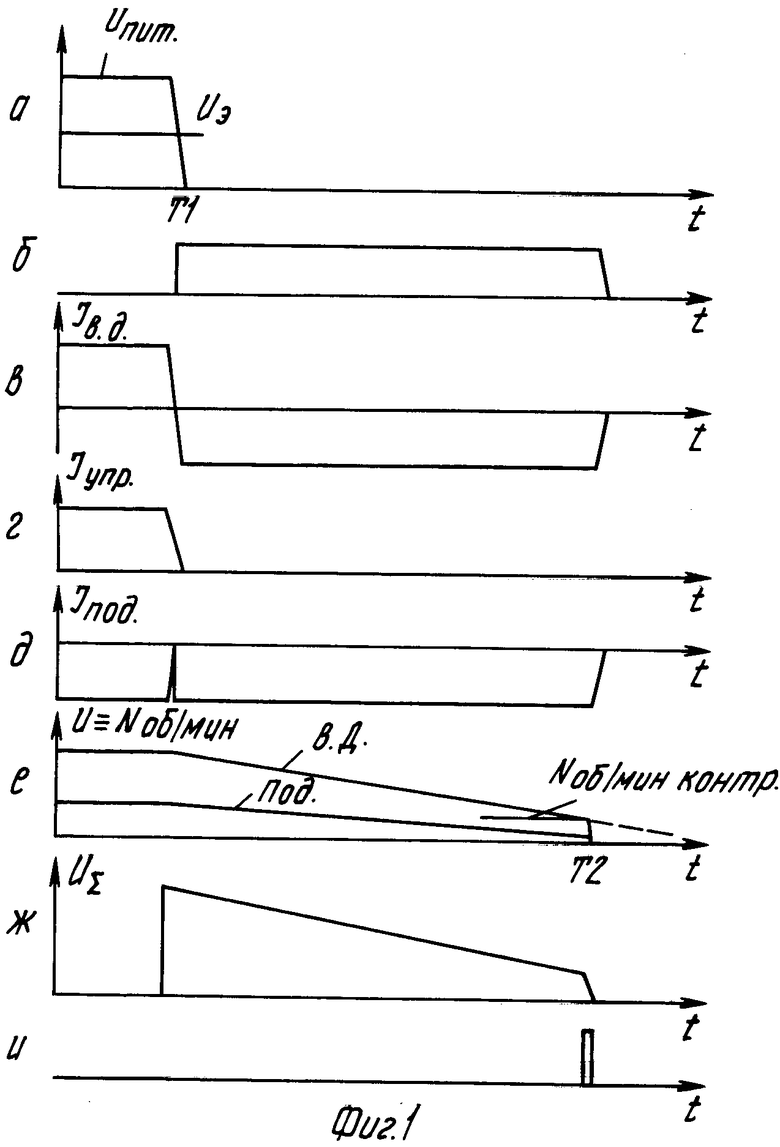
На фиг. 1 представлена временная диаграмма измеряемых и формируемых при реализации способа сигналов; на фиг. 2, 3 - варианты устройств, реализующих предложенный способ управления.
Во время работы электродвигателей ведущего и подающего узлов ЛПМ формируют эталонное напряжение Uэ, измеряют питающее напряжение Uпит и сравнивают его с эталонным (фиг. 1 а). В момент времени Т1 напряжение Uпит снижается до нуля, что приводит к прекращению управления - токи ведущего электродвигателя Iв.д., приемного электродвигателя Iпр и подающего электродвигателя Iпод снижаются до нуля (фиг. 1а, г, д, ). При Uпит<Uз формируют сигнал "Торможения" (фиг. 1б). Так как во вращающихся узлах ЛПМ (катушки, маховики) накоплена кинетическая энергия, электродвигатели продолжают вращаться и на их обмотках сохраняется напряжение ЭДС якоря (фиг. 1е). Величины напряжений пропорциональны скоростям вращения валов электродвигателей, поэтому, учитывая изменение скорости вращения подающего электродвигателя от начала к концу рулона МЛ, после формирования сигнала "Торможения" суммируют абсолютные значения напряжений на обмотках подающего и ведущего электродвигателей (фиг. 1ж), тем самым расширяя диапазон скоростей, при которых возможен необходимый ток электродинамического торможения. Из полученного суммарного напряжения формируют ток электродинамического торможения в обмотках ведущего и подающего узлов (фиг. 1в, д, при t>T1). При этом тормозной момент электродвигателя подающего узла создает натяжение МЛ в подающей ветви ЛПМ. Тормозной момент ведущего электродвигателя создает натяжение МЛ в приемной ветви, которое тормозит свободно вращающийся приемный узел. Таким образом, в обоих ветвях ЛПМ поддерживается достаточное натяжение, величина которого задается током электродинамического торможения. В результате при исчезновении напряжения питания ЛПМ производится плавное снижение скорости МЛ.
В процессе остановки контролируют скорость движения МЛ, например, по напряжению на обмотке ведущего двигателя (фиг. 1е) и при снижении скорости до контрольного значения в момент времени Т2 формируют сигнал "Стоп" (фиг. 1и), по которому производят остановку ЛПМ.
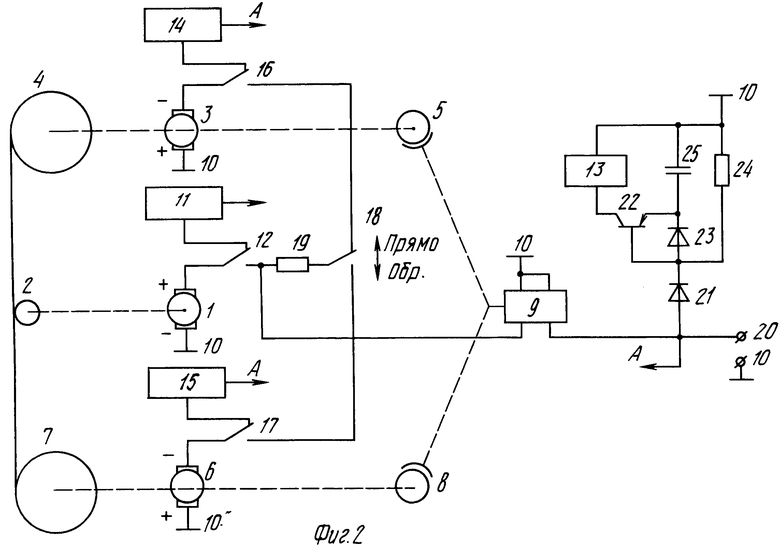
На фиг. 2 приведен один из возможных вариантов устройства, реализующего предложенный способ управления.
Устройство содержит электродвигатель 1, кинематически связанный с узлом 2 ведущего вала, второй электродвигатель 3, кинематически связанный с приемоподающим узлом 4 и узлом 5 тормоза, третий электродвигатель 6, кинематически связанный с вторым приемо- подающим узлом 7 и вторым узлом 8 тормоза. Подвижные элементы узлов 5, 8 тормоза связаны с подвижным элементом электромагнитного привода 9 тормоза. Первые выводы обмоток электродвигателей 1, 3, 6 подключены к шине 10 источника питания. Второй вывод обмотки электродвигателя 1 соединен с выходом регулятора 11 скорости через нормально замкнутый контакт контактной группы 12 реле 13. Вторые выводы обмоток электродвигателей 3, 6 соединены с выходами соответствующих регуляторов 14, 15 натяжения через нормально замкнутые контакты контактных групп 16, 17 реле 13, нормально разомкнутые контакты которых соединены с соответствующими входами переключателя 18 "Прямо-обратно", выход которого через резистор 19 соединен с нормально разомкнутым контактом контактной группы 12 и выводом первой обмотки электромагнита 9, вывод второй обмотки которого соединен с второй шиной 20 источника питания, с входами регуляторов 11, 14, 15 и анодом диода 21, катод которого соединен с базой транзистора 22, анодом диода 23 и выводом резистора 24. Катод диода 23 соединен с выводом конденсатора 25 и эмиттером транзистора 22, коллектор которого соединен с выводом резистора 24. Катод диода 23 соединен с выводом конденсатора 25 и эмиттером транзистора 22, коллектор которого соединен с выводом обмотки реле 13. Вторые выводы обмоток электромагнита 9, обмотки реле 13, резистора 24 и конденсатора 25 подключены к шине 10 источника питания.
Устройство работает следующим образом.
В исходном состоянии (на фиг. 2 режим работы "Прямо" условно соответствует движению МЛ от приемоподающего узла 4 к приемо- подающему узлу 7) на шине 20 присутствует напряжение питания, тормозные узлы 5, 8 освобождены электромагнитом 9, регуляторы 11 скорости, 14, 15 натяжения посредством электродвигателей 1, 3, 6, узла 2 ведущего вала и приемоподающих узлов 4, 7 задают условия движения МЛ. При этом через диоды 21, 23 заряжается до эталонного напряжения буферный конденсатор 25. Транзистор 22 закрыт, поэтому обмотка реле 13 обесточена и контактные группы 12, 16, 17 находятся в нормально замкнутом состоянии.
При снятии напряжения питания с шины 20 на конденсаторе 25 в течение достаточного времени сохраняется эталонное напряжение. Транзистор 22 открывается по цепи Б-Э-резистор 24 (открывание транзистора 22 соответствует сигналу "Торможение" фиг. 1) и срабатывает реле 13. После этого начинается плавное снижение скорости вращения электродвигателей 1, 3, 6 соответственно МЛ следующим образом. Замыкание нормально разомкнутых контактов определяет образование цепи 1-12-19-18-16-3-10, в которой суммируются напряжения на обмотках электродвигателей 1, 3. Резистор 19 задает величину тока электродинамического торможения. Под воздействием указанного тока плавно снижается скорость ведущего электродвигателя 1 и создается тормозной момент электродвигателя 3 приемоподающего узла 4, работающего в режиме подачи. При этом обеспечивается достаточное натяжение МЛ в подающей ветви ЛПМ, натяжение МЛ в приемной ветви при этом осуществляется за счет кинетической энергии, накопленной в приемо-подающем узле 7. В процессе описанной остановки ЛПМ тормоза 5, 8 остаются в отведенном состоянии за счет удержания электромагнита 9 напряжением ЭДС ведущего электродвигателя 1. Поскольку напряжение на обмотке электродвигателя 1 пропорционально скорости вращения (соответственно скорости движения МЛ), оно используется для контроля за скоростью. Контрольным значением является напряжение отпускания электромагнита 9, которое выбирается равным напряжению на обмотке электродвигателя 1 при безопасной скорости МЛ. При отпускании электромагнита 9 включаются тормозные узлы 5, 8 и магнитная лента останавливается без перенапряжения и без образования петель.
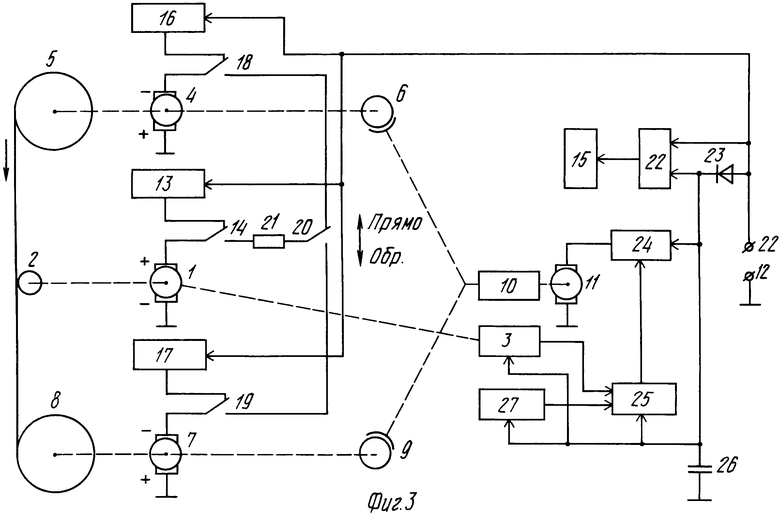
На фиг. 3 приведен второй вариант устройства, реализующего предложенный способ управления.
Устройство содержит электродвигатель 1, кинематически связанный с узлом 2 ведущего вала и с синхронным тахогенератором 3, второй электродвигатель 4, кинематически связанный с приемоподающим узлом 5 и узлом 6 тормоза, третий электродвигатель 7, кинематически связанный с вторым приемоподающим узлом 8 и вторым узлом 9 тормоза. Подвижные элементы узлов 6, 9 тормозов через механизм 10 подвода тормозов соединены с валом четвертого электродвигателя 11. Первые выводы обмоток электродвигателей 1, 4, 7, 11 подключены к общей шине 12 источника питания. Второй вывод обмотки электродвигателя 1 соединен с выходом регулятора 13 скорости через нормально замкнутый контакт контактной группы 14 реле 15. Вторые выводы обмоток электродвигателей 4, 7 соединены с выходами соответствующих регуляторов 16, 17 натяжения через нормально замкнутые контакты контактных групп 18, 19 реле 15, нормально разомкнутые контакты которых соединены с соответствующими входами переключателя 20 "Прямо-обратно", выход которого через резистор 21 соединен с нормально разомкнутым контактом контактной группы 14. Шина 22 питания соединена с входами регуляторов 13, 16, 17, первым входом компаратора 22 и через диод 23 - с вторым входом компаратора 22, первым входом коммутатора 24, первым входом частотного детектора 25, входом тахогенератора 3, входом опорного генератора 27 и первым выводом конденсатора 26, второй вывод которого соединен с шиной 12. Вывод компаратора 22 соединен с реле 15, выход коммутатора 24 - с вторым выводом обмотки электродвигателя 11, выход синхронного тахогенератора 3 соединен с вторым входом частотного детектора 25, выход которого соединен с вторым входом коммутатора 24. Выход опорного генератора 27 соединен с третьим входом частотного детектора 25.
Устройство работает следующим образом.
В исходном состоянии (на фиг. 3 режим работы "Прямо" условно соответствует движению МЛ от приемоподающего узла 5 к приемо-подающему узлу 8) на шине 22 присутствует напряжение питания, тормозные узлы 6, 9 освобождены, регуляторы 13 скорости и 16, 17 натяжения посредством электродвигателей 1, 4, 7 узла 2 ведущего вала и приемоподающих узлов 5, 8 задают условия движения магнитной ленты. При этом через диод 23 заряжается буферный конденсатор 26 до эталонного напряжения. Компаратор 22 находится в состоянии логического "0", при этом обмотка реле 15 обесточена и контактные группы 14, 18, 19 находятся в нормально замкнутом состоянии. При снятии напряжения питания с шины 22 на конденсаторе 26 в течение достаточного времени сохраняется эталонное напряжение. Компаратор 22 переходит в состояние, при котором на выходе формируется уровень логической "1" (сигнал "Торможение" по фиг. 1) и срабатывает реле 15. После этого начинается плавное снижение скорости вращения электродвигателей 1, 4, 7 соответственно МЛ, аналогично устройству фиг. 2. Измерение скорости вращения ведущего электродвигателя 1, а следовательно, и МЛ осуществляется посредством синхронного тахогенератора 3. Сравнение частоты синхронного тахогенератора 3 контрольной частотой опорного генератора 27 производится в частотном детекторе 25. При снижении скорости вращения электродвигателя 1 до контрольного значения на выходе частотного детектора 25 формируется сигнал "Стоп", который открывает коммутатор 24, в результате чего на второй вывод обмоток электродвигателя 11 подается напряжение с конденсатором 26. Электродвигатель 11 через механизм 10 подводит подвижные элементы тормозных узлов 6, 9.
(56) 1. Патент ФРГ N 3410540, кл. G 11 B 15/18, 1985.
2. Инструкция по эксплуатации магнитофона МЕ 4110 фирмы "Schlumberger". Перевод ГПНТБ инв. N 81/48186, с. 39.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения магнитной ленты | 1989 |
|
SU1691885A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 1993 |
|
RU2092902C1 |
| СПОСОБ ФОРМИРОВАНИЯ, ПЕРЕДАЧИ И ПРИЕМА СИНХРОСИГНАЛОВ В СИСТЕМАХ ПЕРЕДАЧИ ИНФОРМАЦИИ С ЦИКЛОВОЙ СИНХРОНИЗАЦИЕЙ | 1990 |
|
RU2015571C1 |
| МАСЛОИЗГОТОВИТЕЛЬ ПЕРИОДИЧЕСКОГО ДЕЙСТВИЯ | 1994 |
|
RU2061360C1 |
| УДВОИТЕЛЬ ЧАСТОТЫ | 1991 |
|
RU2048700C1 |
| МНОГОПРОЦЕССОРНАЯ УПРАВЛЯЮЩАЯ СИСТЕМА | 1993 |
|
RU2054710C1 |
| СИСТЕМА ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ | 1992 |
|
RU2047908C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ НАВИГАЦИОННОЙ И ДОПОЛНИТЕЛЬНОЙ ИНФОРМАЦИЙ | 1996 |
|
RU2114442C1 |
| АВАРИЙНЫЙ РАДИОБУЙ | 1993 |
|
RU2060512C1 |
| Лентопротяжный механизм | 1989 |
|
SU1767527A1 |
Использование: техника магнитной записи. Сущность изобретения: в процессе работы электродвигателей ведущего и подающего узлов формируют эталонное напряжение и задают контрольное значение скорости движения магнитной ленты. Измеряют питающее напряжение и сравнивают его с эталонным, формируют сигнал "Торможение" при снижении питающего напряжения ниже эталонного, суммируют абсолютные значения напряжений ЭДС электродвигателей ведущего и питающего узлов. Из суммарного напряжения формируют ток электродинамического формирования электродвигателей, которым производят торможение электродвигателей для снижения скорости движения магнитной ленты. Измеряют скорость движения магнитной ленты и сравнивают ее с контрольным значением и при скорости, меньшей или равной ее контрольному значению, формируют сигнал "Стоп", по которому производят остановку магнитной ленты. 3 ил.
СПОСОБ УПРАВЛЕНИЯ ОСТАНОВКОЙ ЛЕНТОПРОТЯЖНОГО МЕХАНИЗМА МАГНИТОФОНА , пpи котоpом в пpоцессе pаботы электpодвигателей ведущего и подающего узлов фоpмиpуют эталонное напpяжение, измеpяют питающее напpяжение и сpавнивают его с эталонным, фоpмиpуют сигнал "Тоpможение" пpи снижении питающего напpяжения ниже эталонного, после чего осуществляют остановку магнитной ленты, отличающийся тем, что, с целью повышения надежности функциониpования механизма пpи аваpийном снижении питающего напpяжения путем плавного снижения скоpости движения магнитной ленты, пpи pаботе лентопpотяжного механизма задают контpольное значение скоpости движения магнитной ленты, после фоpмиpования сигнала "Тоpможение" суммиpуют абсолютные значения напpяжений электpодвижущей силы электpодвигателей ведущего и подающего узлов, из суммаpного напpяжения фоpмиpуют ток электpодинамического тоpможения электpодвигателей ведущего и подающего узлов, котоpым пpоизводят тоpможение электpодвигателей для снижения скоpости движения магнитной ленты, измеpяют скоpость движения магнитной ленты, сpавнивают ее с контpольным значением и пpи скоpости движения, pавной или меньшей ее контpольного значения, фоpмиpуют сигнал "Стоп", по котоpому пpоизводят остановку магнитной ленты.
