Изобретение относится к технике определения местоположения транспортного средства, находящегося в нештатной ситуации, например при возникновении условий, вызывающих появление сигналов тревоги, и может быть использовано для решения задач:
определения местоположения похищенных автомобилей;
контроля дорожного движения, в частности выявления местоположения автомобилей, оказавшихся в аварийной ситуации, а также автомобилей, оторвавшихся от преследования (или внешнего наблюдения), нарушивших скоростной режим и т. п.
контроля местоположения железнодорожных вагонов, например, потерянных в результате ошибок при формировании составов.
Известен способ защиты автомобиля от угона, при котором формируют сигнал тревоги в случае попытки открыть дверь или завести двигатель и передают этот сигнал тревоги на центральную станцию [1]
Недостаток этого способа состоит в неопределенности местоположения автомобиля, похищенного путем нападения на водителя или с использованием средств транспортировки (перевозки или буксировки) автомобиля.
Известен способ предупреждения столкновений с тревожной сигнализацией, которая по радиоканалу может транслироваться на центральную станцию [2]
Недостаток этого технического решения состоит в том, что априорная неопределенность местоположения автомобиля, оказавшегося в нештатной ситуации, не может быть уменьшена предлагаемым средством.
Известен способ защиты автомобиля от угона [3] состоящий в том, что осуществляют ультразвуковое сканирование внутри охраняемого автомобиля, формируют сигнал тревоги при появлении в охраняемом объекте движущихся предметов, а также при открывании (или взломе) дверей и окон, передают этот сигнал тревоги по радиоканалу на центральную станцию.
Недостаток этого способа состоит в отсутствии защиты от угона без взлома и проникновения внутрь автомобиля на месте стоянки, например, путем вывоза автомобиля на платформе из зоны с известными координатами.
Известен способ обнаружения и определения местоположения автомобиля, основанный на апроксимации собственного магнитного поля автомобиля магнитным полем точечного диполя [4] Предложено определение направления движения автомобиля относительно стационарных пунктов на основе определения составляющих тензора координатных изменений магнитной индукции (см. IEEE Trans. 1975, V. MAG-11, N 2, 1977, V. AES-13, N 3).
При реализации предложенного способа с использованием современных достижений сверхпроводниковой магнитометрии дальность обнаружения одиночных движущихся автомобилей не превысит нескольких сотен метров.
Недостатками известного магнитометрического способа являются:
малая дальность действия;
низкая точность, а также разрешающая и пропускная способности;
высокая стоимость и сложность аппаратуры, связанная с необходимостью охлаждения габаритных блоков измерителей и применением очень сложных методов селекции магнитного поля обнаруживаемого диполя на фоне мешающих магнитных полей.
Известен способ определения местоположения транспортных средств, при котором излучают с опорных пунктов синхронизированные радиоимпульсы с одинаковой частотой повторения. Один из пунктов с известными координатами назначают ведущим. На транспортном средстве принимают эти импульсы и измеряют разность времени между приемом сигналов ведущего и ведомых пунктов. По каждой разности сигналов определяют соответствующую гиперболическую линию положения автомобиля, а по пересечению этих линий местоположение автомобиля [5]
Недостатки известного способа:
невозможность определения местоположения автомобиля при похищениях и в аварийных ситуациях;
заведомо высокая стоимость автомобильной аппаратуры самоопределения;
низкая точность (сотни метров) и помехозащищенность.
Система, реализующая этот способ [5] содержит передающую аппаратуру опорных пунктов и приемную аппаратуру транспортных средств, причем аппаратура опорных пунктов состоит из последовательно соединенных эталона времени, устройства синхронизации, устройства фазового кодирования и радиопередатчика, а аппаратура транспортных средств состоит из антенного устройства, аналогового устройства обработки сигнала, устройства аналого-цифрового преобразования, устройства цифровой обработки сигнала и синхронизации, устройства управления и индикации, при этом антенное устройство соединено с первым входом аналогового устройства обработки сигнала, которое через первые вход и выход устройства аналого-цифрового преобразования связано с устройством цифровой обработки сигнала и синхронизации, первый выход устройства цифровой обработки соединен с входом устройства управления и индикации, а второй выход устройства цифровой обработки и синхронизации подключен ко вторым входам устройств аналоговой обработки и аналого-цифрового преобразования, выход устройства управления и индикации соединен со вторым входом устройства цифровой обработки сигнала и синхронизации.
Наиболее близким к предлагаемому техническому решению является способ определения местоположения транспортного средства, заключающийся в том, что из мобильных (например, расположенных на искусственных спутниках Земли) или стационарных точек с известными координатами излучают широкополосные (дальномерные) навигационные сигналы, содержащие необходимую служебную и командную информацию, на транспортном средстве по данным приближенного местоположения выбирают рабочую сеть (созвездие) из 3-4 опорных пунктов, осуществляют поиск, захват и сопровождение (по частоте и фазам) сигналов выбранных опорных пунктов, сжимают широкополосные сигналы методами корреляционной обработки и определяют дальности (или псевдодальности) до точек с известными координатами, определяют на транспортном средстве местоположение по алгоритмам дальномерного местоопределения [6]
Недостатки известного способа: известный способ обеспечивает определение местоположения автомобиля непосредственно водителем, однако в нештатных ситуациях (угон, авария и т.д.) координаты транспортного средства требуются соответствующей наземной службе, поэтому недостатком известного способа является невозможность дистанционного определения координат или по крайней мере, неприемлемо низкая дальность такого дистанционного определения координат; для скрытного контроля неприемлемо использование сложной аппаратуры на автомобиле, однако при реализации известного способа возможности упрощения аппаратуры ограничены из-за необходимости решения следующих аппаратуроемких задач непосредственно на транспортном средстве:
поиск и выбор рабочей сети опорных пунктов с известными координатами,
поиск и слежение за широкополосными сигналами выбранных опорных пунктов,
вычисление местоположения.
Таким образом, основным недостатком известного способа является его сложность.
Наиболее близкой по технической сущности и достигаемому эффекту является система, реализующая этот способ [6] Указанная система содержит аппаратуру транспортного средства и аппаратуру опорного пункта, причем аппаратура транспортного средства состоит из антенного устройства, подключенного к входу приемника, который соединен с первым входом системы селекции и обработки сигналов, выход этой системы через устройство измерения дальности (псевдодальности) подключен к первому входу вычислительного комплекса, первый выход вычислительного комплекса через устройство поиска и сопровождения связан со вторым входом системы селекции и обработки сигналов, а второй выход вычислительного комплекса связан с блоком индикации и управления, выход этого блока подключен ко второму входу вычислительного комплекса; аппаратура опорного пункта содержит последовательно соединенные эталон времени, систему формирования навигационного сигнала, систему псевдошумового кодирования, передающее устройство.
Недостатком этой системы является ее сложность, низкая оперативность определения координат, а также невозможность их дистанционного определения.
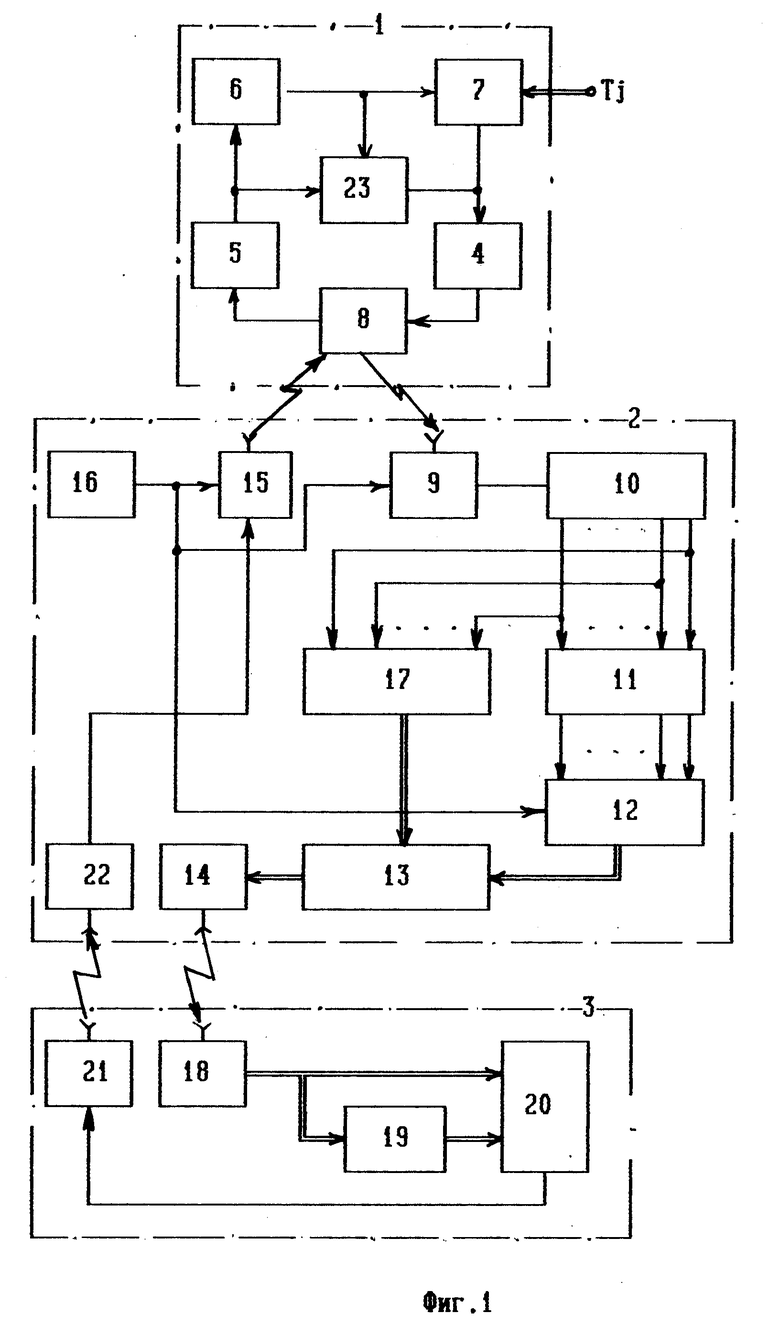
На фиг. 1 представлена структурная схема системы, реализующей предлагаемый способ определения местоположения транспортного средства, где 1 - подсистема транспортного средства, 2 подсистема опорного пункта, 3 - подсистема центрального опорного пункта, 4 передающее устройство ответного сигнала, 5 приемное устройство запросного сигнала, 6 устройство формирования кода транспортного средства, 7 формирователь кода сигнала тревоги, 8 широкополосная антенна, 9 оптимальный приемник шумоподобного сигнала, 10 селектор кодов транспортного средства, 11 устройство селекции кодов, 12 устройство измерения временных интервалов, 13 устройство формирования сообщения, 14 передающее устройство опорного пункта данных, 15 передающее устройство запросного сигнала, 16 генератор шумоподобного кода, 17 устройство селекции кодов сигнала тревоги, 18 приемное устройство канала передачи данных, 19 вычислительное устройство, 20 устройство управления и индикации, 21 передающее устройство центрального опорного пункта, 22 приемное устройство опорного пункта, 23 декодирующее устройство.
На фиг. 2 представлен пример выполнения устройства формирования кодов сигналов тревоги транспортного средства 6, где 241.24n-1 - вентильное устройство, 251.25n-1 кодирующее устройство (например, линия задержки с отводами), 26 суммирующее устройство.
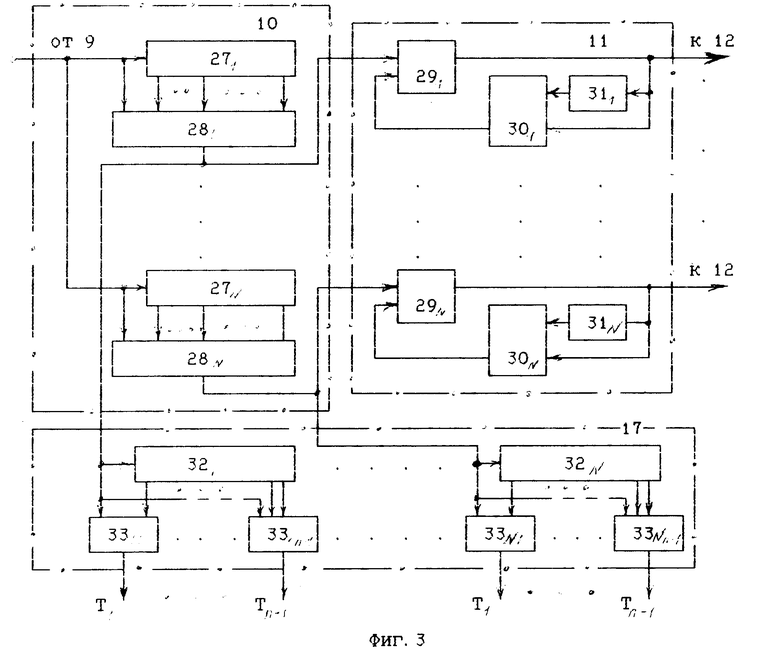
На фиг. 3 представлены примеры выполнения устройств селекции кодов 10, 11 и 17, где 271.27N линия задержки с отводами, 281.28N селектор "m из m" (каскад совпадений), 291.29N вентильное устройство (схема совпадения), 301. 30N устройство управления (триггер), 311.31N устройство задержки, 321.32N линия задержки с отводами, 3311 33Nn-1 вентильное устройство (каскад совпадений), mi число импульсов в коде i-го транспортного средства (i=1.N), N число охраняемых транспортных средств.
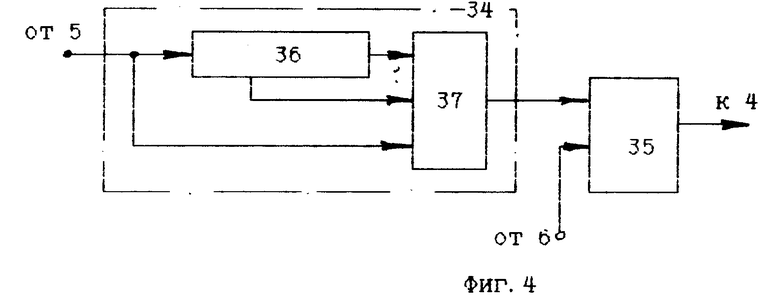
На фиг. 4 представлен пример выполнения декодера запроса 23, где 34 - селектор кода запроса, 35 вентильное устройство, 36 линия задержки с отводами, 37 каскад совпадений.
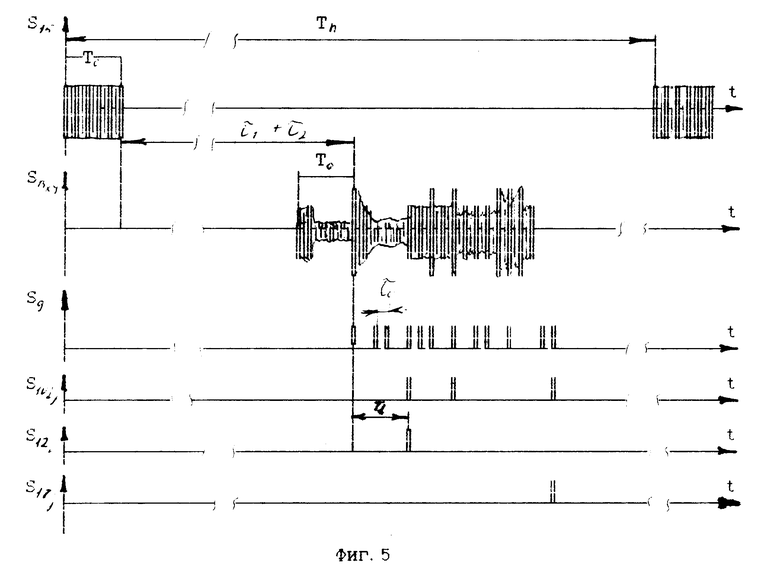
На фиг. 5 представлены временные диаграммы, поясняющие работу системы, где S15 сигнал на выходе передатчика 15, SBX9 - ретранслированный сигнал на входе приемника 9 (суперпозиция неразрешенных по времени сложных радиоимпульсов, образованных из импульсов S15 при кодировании в устройствах 6 и 7, а также вследствие многолучевого распространения сигналов в городских условиях, т.е. вследствие переотражений сигналов зданиями и сооружениями, дифракционных огибаний препятствий и т. п. ), S9 сигнал на выходе приемника 9 (последовательность сжатых импульсов), S10ij код j-го сигнала тревоги на i-том контролируемом транспортном средстве, т.е. на i-том выходе селектора 10, S12i сигнал на выходе селектора первого импульса из пачки 12, S17j сигнал на выходе j-го канала селектора кодов тревоги 17, То длительность радиоимпульса, τo временное разрешение (τo>kτи\, k=1,1.2), τи длительность сжатого импульса, τ1 и τ2 время распространения радиоимпульса до транспортного средства и обратно (τ1 = τ2), Tп период следования импульсов [Tп≅ sup(τ1+ τ2)], Ti длительность кода i-го транспортного средства.
Работает система, реализующая предлагаемый способ, следующим образом.
Каждая подсистема 2 излучает широкополосные псевдошумовые (ПШ) радиоимпульсы S15 (см. фиг. 5). Эти импульсы принимаются всеми подсистемами транспортных средств 1, находящихся в зоне действия опорного пункта. Одновременно с излучением каждого импульса на опорном пункте запускаются счетчики времени устройства 12.
В дежурном режиме каждый радиоимпульс, прошедший устройства 8 и 5, дополняется аналогичными импульсами в устройстве 6, т.е. из каждого радиоимпульса формируется кодовая группа, однозначно определяющая данное транспортное средство. Минимальный дискрет кодирования должен соответствовать условию τo≥ 1,1...2τи, (здесь τи длительность сжатого радиоимпульса). В случаях появления сигналов тревоги от соответствующих датчиков (в качестве датчиков сигналов тревоги могут использоваться: противоугонные устройства, датчики сигнализации об опасности опрокидывания транспортного средства, системы предупреждения столкновений с тревожной сигнализацией и др.) открываются вентили 24 устройства 7, на которые поступают сигналы тревоги Tj, и к кодовой пачке радиоимпульсов добавляются импульсы, задержанные в линиях задержки 25, в соответствии с кодами сигналов тревоги.
Могут использоваться псевдошумовые коды, например, со свойством "не более одного совпадения", чтобы обеспечить эффективное разделение этих кодов (в устройствах 10 и 12, см. ниже) после сжатия и детектирования радиоимпульсов (см. например, М.Б. Свердлик. Оптимальные дискретные сигналы. М. Сов. радио, 1975).
Суперпозиция радиоимпульсов (в общем случае неразрешенных) излучается через устройства 4 и 8. Аналогично ретранслируются сигналы всех опорных станций 2, находящихся в зоне приема соответствующего ретранслятора 1. Каждый опорный пункт 2 излучает псевдошумовые (например, фазоманипулированные) радиоимпульсы в соответствии со своим ПШ-кодом и/или своим частотным литером. Для реализации малогабаритной широкополосной автомобильной антенны 8 могут использоваться технические решения, рассмотренные, например, в обзоре "Широкополосные малогабаритные антенны УКВ диапазона", Зарубежная радиоэлектроника, 1990, N 2, с. 54-60.
В интересах затруднения ликвидации приемопередающих антенн 8 целесообразно использование нескольких антенн, замаскированных под внешние элементы транспортного средства.
Ретранслированные радиоимпульсы принимаются устройством 9 (S на фиг. 5), в котором сжимается каждый импульс с внутриимпульсной модуляцией, соответствующей коду генератора 16. Сжатие этих импульсов может проводиться с помощью согласованного фильтра или корреляционного приемника (см. например, ТИИЭР, 1983, т. 71, N 10, с. 75-93; Я.Д. Ширман. Разрешение и сжатие сигналов. М. Сов. радио, 1974). На выходе приемника 9 появляется последовательность разрешенных импульсов. Селектор кодов 10 обеспечивает выделение импульсов, временные интервалы между которыми соответствуют кодам транспортных средств, ретранслирующих сигналы данного опорного пункта. Последовательность импульсов на соответствующем выходе устройства 28i соответствует коду сигнала тревоги Tj на i-ом транспортном средстве S10ij. Эта последовательность поступает на входы селекторов импульсов 11 и 17. Первый импульс пачки S10ij проходит через открытое вентильное устройство 29i и поступает на вход управляющего устройства (триггера) 30i, которое формирует сигнал (перебрасывается) запирания вентильного устройства 29i. Тот же импульс, пройдя линию задержки 31i (Tзад= Tп, здесь Tп период следования импульсов передатчика 15), возвращает устройство 30i в исходное положение, т.е. на выходе триггера 30i формируется сигнал, открывающий вентиль 29i. Первый импульс, выделенный из пачки, останавливает счет в соответствующем канале (счетчике) устройства измерения 12. Величина измеренного интервала
определяет дальность Ri до ретранслятора 1
где τ1 и τ2 задержки распространения импульса подсистемы 2 до ретранслятора 1 и обратно;
Ti длительность кода i-го транспортного средства; оценка аппаратурных задержек распространения сигнала;
оценка аппаратурных задержек распространения сигнала;
c скорость распространения радиоволн.
Коды сигналов тревоги S17j селектируются в соответствующем канале устройства 17.
В устройстве 13 формируется сообщение (кадр информационного сигала) об обнаруженных транспортных средствах. Могут быть использованы известные методологии выбора кадра сигнала (см. например, Сетевые спутниковые радионавигационные системы. М. Сов. радио, 1982, с. 118-121).
Для решения задачи определения местоположения транспортного средства на подсистеме центрального опорного пункта 3 структурная единица сообщения - строка L должна содержать: служебную информацию о подсистеме опорного пункта 2, т.е. его номер М и текущие координаты (если опорный пункт мобильный); код i-ого транспортного средства (однозначно определяющий его номер и атрибуты); характер сигнала тревоги (определяется кодом сигнала тревоги Tj); величину задержки  ; т.о. L=L(M, Xм, Yм, i, j, τi).
; т.о. L=L(M, Xм, Yм, i, j, τi).
Сообщение L по каналу 14 18 передается на подсистему центрального опорного пункта 3. В вычислительном устройстве 19 по сообщениям двух и более подсистем опорных пунктов 2 определяется текущее местоположение i-го транспортного средства. Исходная система уравнений имеет вид
(Xi-Xom)2 + (Yi-Yom)2= Rim 2
m=1, 2, k; inf k=2
где Xi и Yi текущие координаты i-го транспортного средства;
Xom, Yom координаты m-ой подсистемы опорного пункта;
Rim дальность до i-го транспортного средства, измеренная на m-ой подсистеме опорного пункта (Rim однозначно определяется оценкой временного интервала между моментом излучения кода и приема ретранслированного сигнала, см. выше).
Исходная система уравнений позволяет определить местоположение i-го транспортного средства как точку пересечения поверхности Земли и дальномерных поверхностей положения (т.е. сфер радиусов Rim). Алгоритм решения исходной системы уравнений может быть основан на конечных и итерационных методах. Для разрешения неоднозначности, связанной с нелинейностью исходной системы уравнений, могут использоваться известные методы, основанные на:
априорной информации о местоположении транспортного средства,
избыточных измерениях дальностей,
сопоставлении полученных координат с планом дорог (улиц) и т.д.
Декодированное сообщение с выхода устройства 18 и координаты Xi и Yi поступают на устройство управления и индикации 20 (например, дисплей), которое является выходным устройством предлагаемой системы. Система, реализующая предлагаемый способ, может функционировать в режиме поиска транспортных средств по запросу подсистемы центрального опорного пункта 3. В этом случае запросный сигнал через устройства 20 → 21 → 22 передается на все опорные пункты, на каждом из которых широкополосный радиоимпульс передатчика 15 трансформируется в кодовые группы в соответствии с запрашиваемыми кодами. На i-ом ретрансляторе 1 декодер запроса 23 селектирует код i-го транспортного средства, при этом на выходе устройства 37 (т.е. схемы совпадения селектора кода запроса 34) формируется сигнал (высокий потенциал), отпирающий вентиль 35, который пропускает сигнал с выхода устройства 6 для ретрансляции. Дальнейшая процедура определения местоположения i-го (запрашиваемого) транспортного средства по ретранслированному сигналу не отличается от вышерассмотренной.
Внешнее проектирование системы, реализующей предлагаемый способ, показало, что подсистему транспортного средства (ретранслятор) 1 целесообразно выполнять с малогабаритной активной приемопередающей антенной и с автономным или комбинированным электропитанием. Для повышения защищенности возможно скрытное размещение нескольких ретрансляторов на транспортном средстве. Сеть стационарных подсистем опорных пунктов 2 целесообразно размещать на высотных зданиях и сооружениях (мачты, трубы ТЭЦ и т.п.). Могут использоваться мобильные подсистемы опорных пунктов, местоположение которых контролируется по сети подсистем стационарных опорных пунктов или по сигналам радионавигационных систем (например, таких как Навстар или Глонасс).
Ожидаемые характеристики системы, реализующей предлагаемый способ:
Дальность действия радиолинии "транспортное средство опорный пункт" (т. е. радиус зоны действия стационарного опорного пункта), км
в городских условиях 20
за городом 50-70
Ошибка дальнометрирования в городских условиях, м 30-35
Ошибка местоопределения транспортного средства после обработки информации, м 15-40
Число одновременно обнаруживаемых транспортных средств в зоне действия опорного пункта Практически не ограничено (≥ 105)
Вероятность неразделения сигнала при поступлении на опорный пункт 104 неразрешенных во времени ретранслированных сигналов ≅ 10-6
Преимущество предлагаемых способа и системы состоит в том, что предлагаемый способ обеспечивает решение задачи автоматизированного внешнего (на дальностях несколько десятков км) определения местоположения всех транспортных средств в любом оборудованном сетью опорных пунктов регионе, при этом операции на транспортных средствах упрощены настолько, что реализация аппаратуры транспортных средств может быть организована на любом производстве радиотехнического профиля. Реализация аппаратуры подсистем опорных пунктов и подсистемы центрального опорного пункта возможна на радиотехнических производствах среднего уровня.
Новым качеством является возможность оперативного (в реальном масштабе времени) определения на центральной станции текущих координат всех транспортных средств в контролируемом регионе, на которых сработали датчики тревожной сигнализации, а также транспортных средств, объявленных к розыску (за исключением транспортных средств, находящихся в непрозрачных для радиоволн местах).
Внедрение предлагаемого способа обеспечит сокращение затрат на поиск похищенных или потерянных транспортных средств, повысит эффективность управления движением и борьбы с правонарушениями.
По данным из публикаций в научно-технической литературе можно ожидать, что предлагаемое техническое решение будет представлять интерес для предприятий и организаций РФ, США, Канады, Японии, Германии и Австралии.

Изобретение относится к радиоэлектронным системам определения местоположения и охраны транспортных средств. Предлагаемое техническое решение может использоваться для определения местоположения автомобильных, железнодорожных и других транспортных средств при похищениях, авариях, неправильных формированиях поездов и других нештатных ситуациях. Техническим результатом изобретения является оперативность определения координат и простота и надежность реализации. Суть предложения в том, что с опорных пунктов излучают псевдошумовые широкополосные сигналы, суперпозиция излучений сети опорных пунктов создает навигационное поле в контролируемом районе, эти широкополосные сигналы кодируются и ретранслируются на транспортном средстве при появлении сигналов тревоги или по внешнему запросу, ретранслированные сигналы принимаются и соответствующим образом обрабатываются на опорных пунктах, где измеряют временные интервалы между моментами излучения соответствующего широкополосного сигала и приема ретранслированного сигнала, а также формируют информационный сигнал, в формат которого включают данные о декодированном коде транспортного средства, величине измеренного временного интервала и местоположении опорного пункта, передают информационные сигналы на центральный опорный пункт, где по сигналам, принятым с двух (и более) опорных пунктов определяют местоположение транспортного средства. Местоположение транспортного средства определяется на больших дальностях в зоне действия сети опорных пунктов, которая может быть развернута с помощью стационарных, а также мобильных (автомобильных, авиационных и космических) самоопределяющихся средств. В реальном времени могут быть определены координаты всех транспортных средств, объявленных к розыску. Введение предлагаемого технического решения обеспечит сокращение затрат на поиск похищенных (потерянных) транспортных средств, повысит эффективность управления движением и борьбы с правонарушениями. 2 с.п. ф-лы, 5 ил.