Изобретение относится к пневмоавтоматике и может быть использовано для регулирования выходного давления в генераторах стимулирующих сигналов давления (генераторы давлений, образцовые манометры), применяемых в наземных автоматизированных системах контроля аэрометрического оборудования летательных аппаратов, в системах полунатурного моделирования полетов летательных аппаратов и в качестве образцовых средств измерения давления.
Известно устройство - клапан, увеличивающий давление, которое могло бы выполнять функции регулирования выходного давления в генераторах давлений. Однако, наличие существенных недостатков, отмеченных ниже, исключает возможность применения данного устройства как регулятора давлений. Это большой расход воздуха; жесткая кинематическая связь между каналами регулирования давлений; отсутствие электронного управления расходом воздуха.
Имеется целый ряд подобных устройств, которые обладают теми же недостатками.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство, называемое пневморегулятором, предназначенное для регулирования выходного давления.
Устройство содержит два сильфона, в которые поступает давление, звено, воспринимающее управляющее воздействие сильфонов и через шарнирные соединители воздействующее на заслонки одновременно двух звеньев "сопло - заслонка".
К недостаткам данного устройства следует отнести следующие:
- жесткая кинематическая связь между управляющими сильфонами и заслонками звеньев "сопло - заслонка", что определяет большой расход воздуха;
- наличие мертвых ходов в кинематических парах передачи управляющих воздействий на звенья "сопло - заслонка" определяет зону нечувствительности устройства и, как следствие, запаздывание в управлении расходом воздуха и малое быстродействие;
- отсутствие электронного управления расходом воздуха исключает возможность оперативного управления расходом воздуха.
Цель настоящего изобретения - уменьшение расхода воздуха, повышение быстродействия и возможность управления расходом воздуха с помощью электронных устройств.
Указанная цель достигается тем, что в пневморегулятор давлений, содержащий две пары звеньев "сопло - заслонка", каждое из которых размещены в герметичной полости, два опорных источника пневмопитания, дополнительно введены два электропривода, первое и второе устройства предварительного дросселирования, ресивер, при этом выходы электроприводов кинематически соединены с заслонками звеньев "сопло - заслонка", герметичная полость первого звена пневматически соединена с первой камерой первого устройства предварительного дросселирования, которое содержит первую и вторую камеры, разделенные мембраной, сопло и компенсационную пружину, вторая камера первого устройства предварительного дросселирования пневматически соединена: с соплом первого звена "сопло - заслонка", герметичной полостью второго звена "сопло - заслонка", ресивером, первой камерой второго устройства предварительного дросселирования, содержащего первую, вторую и третью камеры, первую пружину, расположенную в первой камере, мембрану, разделяющую первую и вторую камеры, сопло, заслонку и вторую пружину, расположенную в третьей камере, вторая камера второго устройства предварительного дросселирования пневматически соединена с соплом второго звена "сопло - заслонка", третья камера - со вторым источником пневмопитания, вторая камера первого устройства предварительного дросселирования пневматически соединена с первым источником пневмопитания.
Указанная совокупность отличительных признаков, обеспечивающая уменьшение расхода воздуха, повышение быстродействия и возможность управления расходом воздуха с помощью электронных устройств, в известных решениях не обнаружена, что позволяет считать предложенное техническое решение удовлетворяющим критерию "существенные отличия".
На чертеже представлена принципиальная пневматическая схема.
Устройство пневморегулятор давлений содержит звено "сопло - заслонка" 1, помещенное в герметичной полости 3, звено "сопло - заслонка" 2, помещенное в герметичной полости 4, источники пневмопитания 5, 6, электроприводы 7 и 8, кинематически соединенные соответственно с заслонками звеньев "сопло - заслонка" 1, 2, устройство предварительного дросселирования 9, 10, при этом первое устройство предварительного дросселирования 9 содержит камеры 12, 13, разделенные мембраной 14, сопло 15, пневматически соединенное с источником пневмопитания 5, компенсирующую пружину 16, второе устройство предварительного дросселирования 10 содержит камеры 17, 18, 19, пружину 20, при этом камеры 17, 18 разделены мембраной 21, сопло 22, заслонку 23 и пружину 24, герметичная полость 3 пневматически соединена с камерой 12 устройства предварительного дросселирования 9, камера 13 которого пневматически соединена с соплом звена "сопло - заслонка" 1, герметичной полостью 4, ресивером 11 и камерой 17 устройства предварительного дросселирования 10, камера 18 которого пневматически соединена с соплом звена "сопло - заслонка" 2, а камера 19 - с источником пневмопитания 6.
Устройство работает следующим образом.
Рассмотрим исходное состояние дифференциального регулятора давления; когда давление от источников пневмопитания 5, 6 не подается:
1) в устройстве предварительного дросселирования 9 мембрана 14 пружиной 16 отжата от сопла 15 и подвод давления (вакуумметрического) производится в камеру 9 и герметичную полость 3 от источника пневмопитания 5. При этом состояние звена "сопло - заслонка" 1 таково, что герметичная полость 3 пневматически отключена от ресивера 11 камеры 13 устройства предварительного дросселирования 9, камеры 17 устройства предварительного дросселирования 10, герметичной полости 4;
2) в устройстве предварительного дросселирования 10 мембраной 21, подгруженной пружиной 20, заслонка 23 отжата от сопла 22, и подвод давления (избыточного) производится в камеры 18, 19, и сопло звена "сопло - заслонка" 2 от источника пневмопитания 6. При этом исходное состояние звена "сопло - заслонка" 2 таково, что камеры 18, 19 устройства предварительного дросселирования 10 пневматически отключены от герметичной полости 4.
В этом случае давление в камере 13 (Р1) устройства предварительного дросселирования и камере 17 (Р2) устройства предварительного дросселирования 10 равно давлению в ресивере 11 (Ро), т. е.
Ро = Р1 = Р2
При подключении источников пневмопитания 5 вакуумметрического и 6 избыточного давлений:
1) в камере 12 устройства предварительного дросселирования 9 создается разрежение, и под воздействием разности давлений мембрана 14 преодолевает усилия пружины 16 и закрывает сопло 15. В этом случае в камере 12 поддерживается давление,
-Δ Р = Рвак - Ро = const, которое пропорционально эффективной площади мембраны 14 и усилию пружины 16 относительно Ро;
2) в камерах 18, 19 устройства предварительного дросселирования 10 создается избыточное давление, и под воздействием разности давлений и усилия пружины 24 мембрана 21 преодолевает усилие пружины 20 и заслонка 23 закрывает сопло 22.
В этом случае в камере 18 поддерживается давление
+Δ Р = Ризб - Ро = const, которое пропорционально эффективной площади мембраны 21 и усилию пружин 20 и 24 относительно давления Ро.
Если необходимо создать в ресивере 11 давление меньше начального давления, т. е. Рвых < Ро, от электронного устройства, функции и схемное построение которого известны, подается управляющий сигнал на электропривод 5, выход которого воздействует на заслонку звена "сопло - заслонка" 1 таким образом, что открывается сопло и давление -Δ Р, под воздействием которого находится герметичная полость 3, дается в ресивер 11, герметичную полость 4, камеры 13, 17 соответственно устройств предварительного дросселирования 9, 10.
В этом случае давление в ресивере 11 и камерах 13 и 17 соответственно устройств предварительного дросселирования 9, 10 уменьшается на величину Δ Р, т. е.
Рвых = Ро - Δ Р.
Под воздействием разности давлений, созданных в камерах 12, 13 устройства предварительного дросселирования 9, и усилия пружины 16 мембрана 14 занимает свое первоначальное положение и открывает сопло 15. Под воздействием давления от источника пневмопитания 5 и давления в ресивере 11, равном Рвых = Ро - Δ Р мембрана 14 преодолевает усилие пружины 16 и закрывает сопло 15. В этом случае в камере 12 поддерживается давление
- Р = Рвых - (Ро - Δ Р) = const, которое через герметичную полость 3 и сопло звена "сопло - заслонка" 1 поступает в ресивер 11, камеры 13, 17 соответственно устройств предварительного дросселирования 9, 10, где и изменяет величину выходного давления
Рвых = Ро - 2 Δ Р.
В дальнейшем процесс регулирования повторяется, и выходное давление изменяется на очередную величину - Δ Р. Изменение выходного давления будет происходит до тех пор, пока от электронного устройства не поступит управляющий сигнал, который через электропривод 7 установит звено "сопло - заслонка" 1 в исходное состояние, при котором сопло закрыто заслонкой, и герметичная полость 3 пневматически отключается от ресивера 11, камер 13, 17 соответственно устройств предварительного дросселирования 9, 10 и герметичной полости 4, т. е. заданная величина давления
Рвых = Ро - Pвых= P0- Pi Рi достигнута.
Pi Рi достигнута.
Если необходимо создать в ресивере давления больше начального давления, т. е. Рвых > Ро от электронного устройства, функции и схемное построение которого известны, подается управляющий сигнал на электропривод 8, выход которого воздействует на заслонку звена "сопло - заслонка" 2 таким образом, что открывается сопло и давление +Δ Р, под воздействием которого находится герметичная полость 4, поступает в ресивер 11, в камеры 13, 17 соответственно устройств предварительного дросселирования 9, 10 и сопло звена "сопло - заслонка" 1.
В этом случае давление в ресивере 11 и камерах 13, 17 соответственно устройств предварительного дросселирования 9, 10 увеличивается на величину Δ Р, т. е.
Рвых = Ро + Δ Р.
Под воздействием разности давлений, создаваемых в камерах 17, 18 устройства предварительного дросселирования 10 и усилия пружины 20, 24 мембрана 21 занимает свое первоначальное положение и открывает сопло 22. Под воздействием давления источника пневмопитания 6 и давления в ресивере 11, равного Рвых = Ро + Δ Р, мембрана 21 преодолевает усилие пружины 20 и закрывает сопло 22. В этом случае в камере 18 поддерживается давление
+ Δ Р = Ризб - (Ро + Δ Р) = const, которое через герметичную камеру 4 и сопло звена "сопло - заслонка" 2 поступает в ресивер 11, камеры 13, 17 соответственно устройств предварительного дросселирования 9, 10, где и изменяет величину выходного давления
Рвых = Ро + 2Δ Р.
В дальнейшем процесс регулирования повторяется, и выходное давление изменяется на очередную величину + Δ Р. Изменение выходного давления будет происходить до тех пор, пока от электронного устройства не поступит управляющий сигнал, который через электропривод 8 установит звено "сопло - заслонка" 2 в исходное состояние, при котором сопло закрыто заслонкой и камера 18 устройства предварительного дросселирования 10 пневматически отключается от ресивера 11, сопло звена "сопло - заслонка" 1, камер 13, 17 соответственно устройств предварительного дросселирования 9, 10, т. е. заданная величина давления
Рвых = Ро + Pвых= P0+ PiРi достигнута.
PiРi достигнута.
Таким образом, так как регулирование давления производится порциями Δ Р, отбор давления воздуха от источников пневмопитания 5, 6 производится циклически, что и определяет сокращение расхода воздуха и, как следствие, для обеспечения регулирования давления с помощью предлагаемого устройства требуются источники пневмопитания (5, 6) значительно меньшей производительности, что обеспечивает экономию энергетических ресурсов.
Независимое регулирование давлений по каналам меньше Ро и больше Ро (Ро - начальное давление в ресивере 11) и минимальные зазоры в кинематической паре обеспечивают высокое быстродействие по сравнению с прототипом и аналогами. Кроме этого, обеспечение возможности управления расходом воздуха с помощью электронных устройств также повышает быстродействие и обеспечивает:
а) мобильное управление;
б) возможность управления от ЭВМ. (56) Заявка Японии N 61-23401, кл. F 15 B 5/00, 1986.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАНАЛЬНЫЙ ЗАДАТЧИК ДАВЛЕНИЯ | 1990 |
|
RU2015529C1 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНОГО СИГНАЛА | 1992 |
|
RU2050574C1 |
| РАСХОДОМЕР-СЧЕТЧИК ГАЗА ИЛИ ЖИДКОСТИ | 1993 |
|
RU2077867C1 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ПРУЖИН СЖАТИЯ | 1997 |
|
RU2138794C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО КОНТРОЛЯ | 1991 |
|
RU2015523C1 |
| Пневматическая система дистанционного управления дизелем | 1989 |
|
SU1721279A1 |
| Устройство для автоматического регулирования уровня коллодия в фильере отливочной машины | 1980 |
|
SU970328A2 |
| СПОСОБ ПРОВЕРКИ ФУНКЦИОНИРОВАНИЯ ВОЗДУШНО-ДИНАМИЧЕСКОГО РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМЫХ СНАРЯДОВ ИЛИ РАКЕТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2218548C2 |
| Автоматическая система регулирования производительности газовых скважин | 1977 |
|
SU746086A1 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ ВОЗДУШНО-ДИНАМИЧЕСКОГО РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2255299C1 |
Использование: для регулирования выходного давления в генераторах стимулирующих сигналов давления (генераторы давлений, образцовые манометры), применяемые в наземных автоматизированных системах контроля аэрометрического оборудования летательных аппаратов, в системах полунатурного моделирования полетов летательных аппаратов и в качестве образцовых средств измерения давления. Целью изобретения является уменьшение расхода воздуха, повышение быстродействия и возможность управления расходом воздуха с помощью электронных устройств. Сущность изобретения состоит в уменьшении расхода воздуха, повышении быстродействия и возможности управления расходом воздуха с помощью электронных устройств за счет независимого регулирования давления по каналам и минимальных зазоров в кинематической паре. В пневморегуляторе давления звено "сопло-заслонка 1 помещено в герметичной полости 3, звено "сопло-заслонка" 2 помещено в герметичной полости 4, связаны с источниками пневмопитания 5, 6, дополнительно введены электроприводы 7, 8, устройства предварительного дросселирования 9, 10, при этом первое устройство предварительного дросселирования 9 содержит камеры 12, 13, разделенные мембраной 14, сопло 15, компенсирующую пружину 16, второе устройство предварительного дросселирования 10 содержит камеры 17, 18, 19, пружину 20, при этом камеры 17, 18 разделены мембраной 21, сопло 22, заслонку 23 и пружину 24, рессивер 11. 1 ил.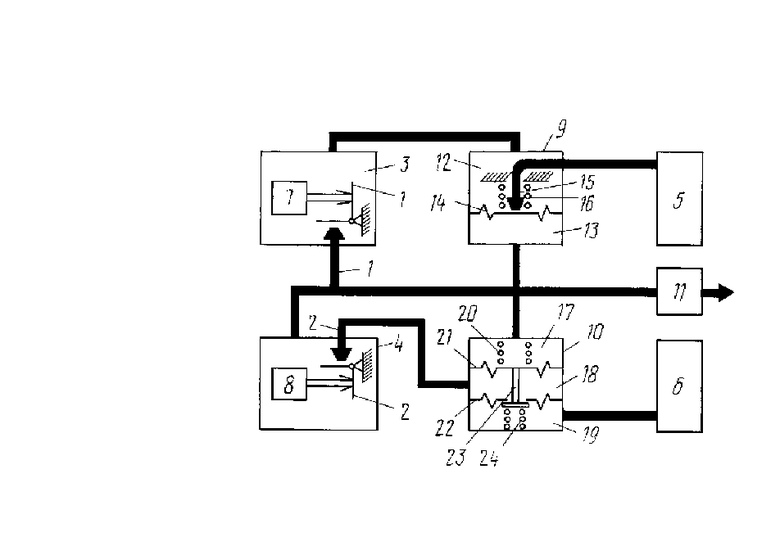
ПНЕВМОРЕГУЛЯТОР ДАВЛЕНИЯ, содержащий два звена сопло - заслонка, каждое из которых размещено в герметичной камере и подключено к одному из двух опорных источников пневмопитания, отличающийся тем, что, с целью повышения быстродействия и КПД и расширения диапазона управления, он снабжен ресивером, первым устройством предварительного дросселирования с двумя камерами, разделенными мембраной, подпружиненной компенсационной пружиной, установленной в первой камере, и с установленным в последней соплом, обращенным к мембране, и вторым устройством предварительного дросселирования с тремя разделенными двумя мембранами камерами, соплом и с размещенной в третьей камере заслонкой, соединенной с мембраной, установленной между первой и второй камерами и подпружиненной двумя пружинами, размещенными в первой и третьей камерах, а каждая из заслонок звеньев сопло - заслонка снабжена электроприводом, при этом герметичная полость первого звена сопло - заслонка пневматически соединена с первой камерой первого устройства предварительного дросселирования, вторая камера которого пневматически соединена с соплом первого звена сопло - заслонка, герметичной полостью второго звена сопло - заслонка, ресивером и с первой камерой второго устройства предварительного дросселирования, вторая камера которого пневматически соединена с соплом второго звена сопло - заслонка, а третья камера - с вторым источником пневмопитания, причем вторая камера первого устройства предварительного дросселирования пневматически соединена с первым источником пневмопитания.
