Изобретение относится к квантовой электронике и может быть использовано в информационных и измерительных системах.
Известны различные радиопеленгаторы - адаптивные амплитудно-моноимпульсные, фазовые, позволяющие произвести измерение угловых координат положения объекта.
Точность измерения угловых координат определяется прежде всего отношением b/λ , где b - база измерительной системы;
λ - рабочая длина волны.
Для повышения точности измерения угловых координат в радиотехническом диапазоне волн необходимо увеличивать, что не всегда возможно и имеет естественные габаритные ограничения.
Это является существенным недостатком таких средств. Дальнейшее повышение точности измерения угловых координат может быть достигнуто при использовании сигналов оптического диапазона.
Наиболее близким по технической сущности к данному устройству является система апертурного зондирования, содержащая лазер оптический выход которого сопряжен с системой из N зеркал, каждое из которых оптически связано с соответствующим оптическим фазовым модулятором, а также оптический приемник, выход которого подключен к входу усилителя, выход которого соединен с входами N полосовых фильтров, выходы которых соединены с первыми входами соответствующих синхронных детекторов, выходы которых подключены к первым входам оптических фазовых модуляторов, к вторым входам которых подключены выходы соответствующих модулирующих генераторов, соединенные одновременно с вторыми входами синхронных детекторов.
Гармоническая фазовая модуляция, вводимая в каждый канал по частоте ωi , где 1 < i < N, приводит к изменению интерференционной картины, что, в свою очередь, приводит к амплитудной модуляции отраженного сигнала, который принимается оптическим приемником, усиливается усилителем и через полосовые фильтры, настроенные на модулирующие частоты, поступает на синхронные детекторы, где сигнал подвергается синхронному детектированию. Сигнал с выходов фильтров нижних частот является управляющим сигналом и подается на входы фазовых модуляторов, приводя к совмещению максимума интерференционной картины с объектом.
При смещении объекта в каждом из каналов возникнут фазовые ошибки, которые и будут компенсированы в устройстве-прототипе. В результате максимум интенсивности интерференционной картины переместится за объектом.
Недостатками прототипа является невозможность непосредственного выделения угломерной информации, что при больших углах отклонения объекта не позволяет вычислить требуемый угол разворота системы в целом, что приводит к снижению точности совмещения максимума интенсивности интерференционной картины с объектом.
Техническим результатом, достигаемым с помощью данного изобретения является уменьшение ошибки в измерении угловых координат объекта.
С этой целью в устройство-прототип дополнительно введены два угломерных канала, каждый из которых содержит 4 полосовых фильтра, настроенных на комбинационные частоты сигнала модулирующих генераторов, четыре амплитудных детектора, два инвертора и суммирующее устройство, при этом выходы полосовых фильтров соединены с выходом усилителя, а выходы - с входами амплитудных детекторов, при этом в каждом угломерном канале выходы первого и второго амплитудных детекторов соединены с входами двух инверторов соответственно, выходы которых подключены к первым и вторым входам соответствующего суммирующего устройства, а выходы третьего и четвертого амплитудных детекторов соединены с третьим и четвертым входами соответствующих суммирующих устройств, а выходы каждого из суммирующих устройств являются измерительными выходами устройства.
Сущность изобретения заключается в выделении из сигнала модуляции отраженного оптического излучения комбинационных частот двух каких-либо каналов, образующих на апертуре устройства измерительную базу, в измерении их взаимной разности фаз при условии работы контура адаптивного управления как в устройстве-прототипе, который обеспечивает формирование диаграммы направленности излучающей апертуры на объекте.
Отличительными признаками данного устройства является реализация прямых измерений угловых координат объекта относительно направления максимума диаграммы направленности излучающей апертуры за счет использования информации, содержащейся в отраженном от объекта оптическом излучении на комбинационных частотах модуляции двух различных каналов.
На чертеже представлена структурная схема данного устройства, где обозначены: 1 - лазер; 2.1. . . 2. N - система зеркал; 3.1. . . 3. N - фазовые модуляторы; 4 - оптический приемник; 5 - усилитель; 6.1. . . 6. N - полосовые фильтры; 7.1-7. N - модулирующие генераторы; 8.1. . . 8. N - синхронные детекторы; 9.1-9. N - фильтры нижних частот; 10.1. . . 10.8 - полосовые фильтры комбинационных частот 11.1. . . . 11.4 - амплитудные детекторы, 12.1. . . 12.4 - инверторы, 13.1. . . 13.2 - суммирующие устройства.
Устройство работает следующим образом.
Излучение лазера 1 поступает на систему зеркал 2, где делится на равные по мощности пучки, отражаемые от зеркал 2.1. . . 2. N. Сигнал с выхода каждой субапертуры 2.1. . . 2. N поступает на оптические входы фазовых модуляторов 3.1. . . 3. N, на управляющие входы которых подается сигнал с выхода модулирующих генератора 7.1. . . 7. N, за счет которых производится фазовая модуляция гармоническим сигналом на частоте ωi (где i - номер канала) излучения в каждом канале/субапертуре/. Излучение с выходов модуляторов попадает на объект, где образует интерференционную картину. Отраженное от объекта излучение принимается оптическим приемником 4. С выхода оптического приемника 4 сигнал, пропорциональный интенсивности отраженного излучения, поступает на усилитель 5, где усиливается, а затем подается на полосовые фильтpы 6.1. . . 6. N и 10.1. . . 10.8. Полосовые фильтpы 6.1. . . 6. N настpоены на частоты модуляции ωi каждого канала. Сигнал с выхода полосовых фильтpов 6.1. . . 6. N поступает на синхpонные детекторы 8.2. . . 8. N, на управляющие входы которых поступают сигналы с выходов модулирующих генераторов 7.1. . . 7. N. Сигналы с выходов синхронных детекторов поступают на входы фильтров нижних частот 9.1. . . 9. N, с выхода которых сигнал, пропорциональный синусу разности фазы i-й субапертуры и опорной фазы канала, как и в устройстве-прототипе. Эти сигналы управляют фазовыми модуляторами 3.1. . . 3. N и таким образом вносят компенсирующий фазовый сдвиг в излучение субапертур, что приводит к формированию синфазного поля излучения на объекте.
Одновременно сигнал с выхода усилителя 5 поступает на входы полосовых фильтров 10.1. . . 10.8, настроенных соответственно на частоты 2 Ωj-Ωi, Ωi+2Ωj; 2Ωi-Ωj; Ωj+2Ωi; 2Ωк-Ωe, Ωк+2Ωe, 2Ωк-Ωe, Ωк+2Ωe; где i, j - номера субапертур, выбранных для измерения углов по одной из осей;
k, l - номера субапертур для измерения углов по ортогональной первой оси.
Полосовые фильтры 10.1. . . 10.8 настроены именно на эти комбинационные частоты, так как на этих частотах в спектре отраженного от объекта сигнала присутствуют составляющие вида:
sin Δϕi,j(sin((Ωi-2Ωj)t+sin((Ωi+
+2Ωj) t)),
sin Δϕi,j(sin((Ωj-2Ωi)t+sin((Ωj+
+2Ωi) t)), амплитуда которых пропорциональна разности фаз конкретно взятых i-го и j-го каналов излучения.
Если принять во внимание, что происходит одновременная работа системы адаптивной оптики, которая стремится сформировать на объекте дифракционно-ограниченный пучок, то при неподвижном объекте, находящемся в направлении максимума диаграммы направленности излучения, апертуры все Δϕi,j, Δϕк,l равны нулю.
Если же объект начинает двигаться, то в каждом канале появляются фазовые искажения, что приводит к конечному значению Δϕi,j, Δϕк,l.
Предположим, что излучение до объекта от субапертур i и j распространяются по параллельным трассам, что справедливо при R>>b, где R - расстояние до объекта;
b - расстояние между субапертурами.
Тогда разность хода излучения от i и j субапеpтуp опpеделится как Δ R = b sin α , где α - угол отклонения от максимума ДН.
В то же вpемя ΔR= λ/2πΔϕi,j,
λ - длина волны излучения.
Значит, угол α = arcsin ((λ/2πbΔϕi,j).
С выходов полосовых фильтpов 10.1. . . 10.8 сигналы подаются на амплитудные детектоpы 11.1. . . 11.8 соответственно.
С выхода амплитудных детекторов 11.1, 11.2, 11.5, 11.6 сигналы через инверторы соответственно 12.1. . . 12.4, а с выхода амплитудных детекторов 11.3, 11.4, 11.7 и 11.8 пpямо поступают на входы суммирующих устройств 13.1, 13.2. За счет работы адаптивного контура, аналогичного устройству-прототипу, обеспечивается постоянная фокусировка излучения на объекте, а за счет дополнительно введенных блоков осуществляется измерение угловых координат объекта в двух ортогональных плоскостях относительно оптической оси системы. (56) Теоретические основы радиолокации. Учебное пособие для Вузов. Под ред. В. Е. Дулевича, М. : Сов. радио, с. 256.
Патент США N 3731103, кл. Н 04 В 9/00, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная оптическая система апертурного зондирования | 1990 |
|
SU1793219A1 |
| ДАТЧИК ВОЛНОВОГО ФРОНТА | 1993 |
|
RU2065142C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ МОРЕПЛАВАНИЯ СУДОВ С БОЛЬШОЙ ОСАДКОЙ И ВОДОИЗМЕЩЕНИЕМ | 2007 |
|
RU2342681C2 |
| Адаптивная оптическая система с многоканальной фазовой модуляцией | 1988 |
|
SU1569785A1 |
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ | 2019 |
|
RU2703362C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ВИДА ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 1991 |
|
RU2010435C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ОСОБО ВАЖНЫХ И ОПАСНЫХ ГРУЗОВ | 2016 |
|
RU2628986C1 |
| ПАНОРАМНЫЙ ПРИЕМНИК | 1992 |
|
RU2010245C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИНФОРМАЦИОННЫХ СИГНАЛОВ | 2004 |
|
RU2270522C1 |
| Устройство для измерения разности фаз | 1984 |
|
SU1195280A1 |
Изобретение относится к квантовой электронике и может быть использовано в информационных и измерительных системах. Сущность изобретения заключается в том, что в известное устройство для определения углового положения объекта, содержащее лазер 1, систему из N зеркал 2, N оптических фазовых модуляторов 3, оптический приемник 4, усилитель 5, N полосовых фильтров 6, N синхронных детекторов 8, N фильтров низких частот 9, N модулирующих генераторов 7, введены два угломерных канала, каждый из которых содержит четыре полосовых фильтра 10, настроенных на комбинационные частоты сигналов модулирующих генераторов 7, четыре амплитудных детектора 11, два инвертора 12, и суммирующее устройство 13. 1 ил.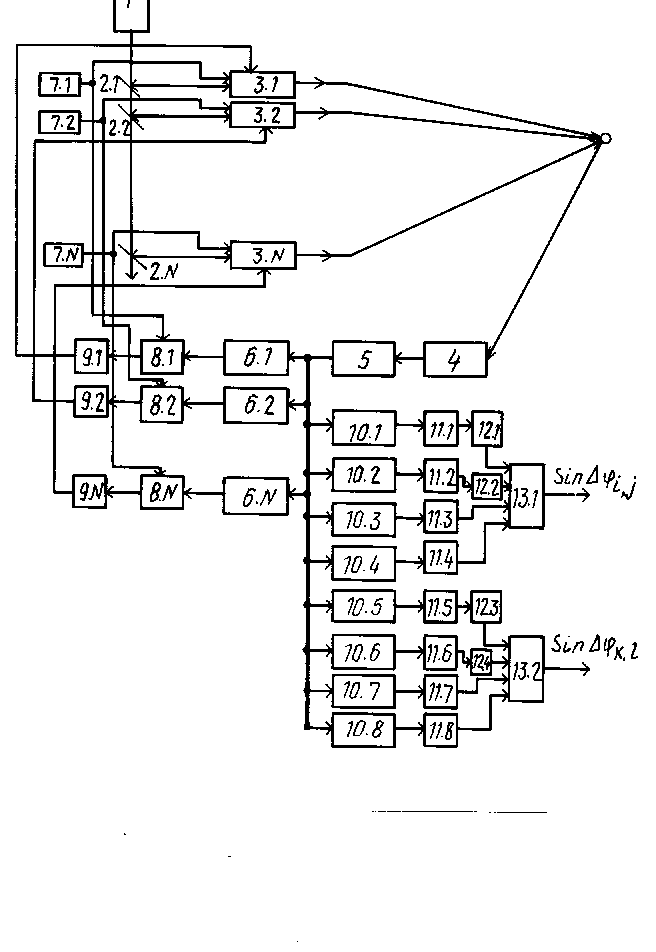
ОПТИКО-ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ОБЪЕКТА, содержащее лазер, оптический выход которого сопряжен с системой из N зеркал, каждое из которых оптически связано с соответствующим оптическим фазовым модулятором, а также оптический приемник, выход которого подключен к входу усилителя, выход которого соединен с входами N полосовых фильтров, выходы которых соединены с первыми входами соответствующих синхронных детекторов, выходы которых подключены к первым входам оптических фазовых модуляторов, к вторым входам которых подключены выходы соответствующих модулирующих генераторов, соединенные одновременно с вторыми входами синхронных детекторов, отличающееся тем, что введены два угломерных канала, каждый из которых содержит четыре фильтра, настроенных на комбинационные частоты сигналов модулирующих генераторов, четыре амплитудных детектора, два инвертора и суммирующее устройство, при этом входы полосовых фильтров соединены с выходом усилителя, а выходы - с входами амплитудных детекторов, при этом в каждом угломерном канале выходы первого и второго амплитудных детекторов соединены с входами двух инверторов соответственно, выходы которых подключены к первым и вторым входам соответствующего суммирующего устройства, а выходы третьего и четвертого амплитудных детекторов соединены с третьим и четвертым входами соответствующих суммирующих устройств, а выходы каждого из суммирующих устройств являются измерительными входами устройства.
