Изобретение относится к производству изделий сборного бетона и железобетона.
Известна установка для очистки наружных поверхностей железобетонных изделий, включающая раму с направляющими, в которых размещается вертикально подвижная каретка с приводным рабочим органом, приводы механизмов перемещения каретки и прижима рабочего органа, причем подвижная каретка выполнена в виде короба, с горизонтальными направляющими, в которых установлена дополнительная каретка, соединенная посредством шпонок с механизмом прижима. Рабочий орган выполнен в виде двух звездообразных щеток, установленных на дополнительной каретке с перекрытием обрабатываемых зон [1] .
Однако такая установка не обеспечивает качественной зачистки изделий сложной конфигурации.
Наиболее близким по технической сущности и достигаемому результату к заявляемому изобретению является установка для обработки поверхностей изделий из бетонных смесей, содержащая раму, в горизонтальных направляющих которой размещена каретка с торцовыми приводными щетками и механизмами прижима и отвода последних, наклонные цилиндрические щетки, установленные на раме посредством двуплечих рычагов, свободные концы которых соединены с отводящей и подводящей трособлочными системами с противовесами и силовым цилиндром. При этом механизм прижима торцовых щеток выполнен в виде трособлочной системы, часть блоков которой закреплена на свободных концах приводных валов торцовых щеток при помощи подшипников качения, а другая часть блоков установлена на раме и каретке, а механизм отвода - в виде смонтированных на раме отклоняющего блока, силового цилиндра и противовеса. Противовес и каретка посредством гибкой связи соединены со штоком силового цилиндра [2] .
Данное техническое решение направлено на сокращение времени и повышение качества обработки изделий сложной конфигурации.
Однако описанное техническое решение установки для обработки наружных поверхностей изделий из бетонных смесей, как показала практика ее использования, имеет ряд недостатков.
Так, жесткая фиксация наклонных цилиндрических щеток на валу их привода, то есть исключение подвижности щетконосителя в осевом и угловом направлениях, снижает активное взаимодействие щеточных элементов с поверхностью обрабатываемых изделий, с увеличением технологического цикла очистки требуется повышенный расход промывочного раствора. Силовое воздействие и силовой контакт в рабочем режиме очистки щеточных элементов на поверхность изделий при чистовой обработке ограничены, а инерционные силы удара щеточных элементов рабочего органа очистки с поверхностью изделий способствуют повышенному износу щеток, выпаданию щеточных элементов, то есть, долговечность их снижается.
Кроме того, отсутствие режима осевых и угловых колебаний цилиндрического рабочего органа очистки - щетки и, соответственно, амплитудно-частотного характера его движения, отражающих геометрические условия контактирования щеточных элементов с поверхностью обрабатываемого изделия, значительно снижает эффективность установки при выполнении технологической операции. То есть, из-за отсутствия в приводе механизма очистного рабочего органа узла, осуществляющего программируемое сложное движение с внутрицикловым изменением угловой скорости, не в полной мере реализуется положительно доминирующий фактор - сдвиговый характер очистных элементов при фиксированных осевых и угловых их значениях, и следовательно, - геометрические характеристики траектории движения, динамика и направленность силового воздействия рабочего органа очистки на обрабатываемую поверхность. Это, в свою очередь, снижает качество обработки наружной поверхности изделий, и следовательно, эксплуатационные возможности установки.
Настоящее изобретение направлено на повышение качества обработки поверхности изделий из бетонных смесей путем создания заданного программируемого вращения и возвратно-поступательного перемещения цилиндрических щеток с переменными угловыми и горизонтальными ускорениями.
Решение поставленной задачи достигается тем, что установка для обработки поверхности изделий из бетонных смесей содержит раму, на которой размещена каретка с торцовыми приводными щетками и механизмами их прижима и отвода, и наклонные цилиндрические щетки, установленные на раме посредством двуплечих рычагов, свободные концы которых соединены с подводящей и отводящей трособлочными системами с противовесами и силовым цилиндром. Механизмы прижима и отвода торцовых щеток также выполнены в виде трособлочных систем с противовесами и силовым цилиндром. Каждая цилиндрическая щетка своим корпусом соединена с приводным валом посредством коаксиально расположенных на нем винтовых пружин, при этом цилиндрическая щетка установлена на двуплечем рычаге с возможностью ее осевого перемещения. Механизм осевого перемещения выполнен в виде сателлита с пальцем, неподвижного зубчатого колеса с водилом, кривошипа, жестко закрепленного на конце вала привода, и поводка, закрепленного на валу щетки со стороны привода. Поводок кинематически соединен с пальцем сателлита, вал которого шарнирно соединен с водилом, сателлит находится в зацеплении с неподвижным зубчатым колесом, водило одним концом закреплено в опоре корпуса, а другим соединено через шатун с кривошипом. Кривошип смещен относительно оси водила.
Сопоставительный анализ с прототипом позволяет сделать вывод, что заявляемая установка для обработки наружной поверхности изделий из бетонных смесей отличается тем, что механизм осевого перемещения цилиндрических щеток выполнен в виде сателлита с пальцем, неподвижного зубчатого колеса с водилом, кривошипа, жестко закрепленного на конце вала привода, и поводка, закрепленного на валу щетки со стороны привода, при том поводок кинематически соединен с пальцем сателлита, вал которого шарнирно соединен с водилом, сателлит установлен с возможностью зацепления с неподвижным зубчатым колесом, водило одним концом закреплено в опоре корпуса, а другим соединено через шатун с кривошипом, размещенным со смещением относительно оси водила.
При таком конструктивном оформлении исполнительного механизма обработки поверхности изделий из бетонных смесей механическая система вал - винтовая пружина - цилиндрическая щетка наряду с вращательным движением совершает и возвратно-поступательное движение с внутрицикловыми переменными линейными ускорениями, при этом создаются необходимые параметры режима колебаний щетки. Структура движения щетки, силовое поле ее воздействия на обрабатываемую поверхность и геометрические условия контактирования эластичных элементов щетки в широком диапазоне амплитудно-частотных и частотно-силовых характеристик обеспечивают качественную обработку изделий из бетонных смесей сложной конфигурации.
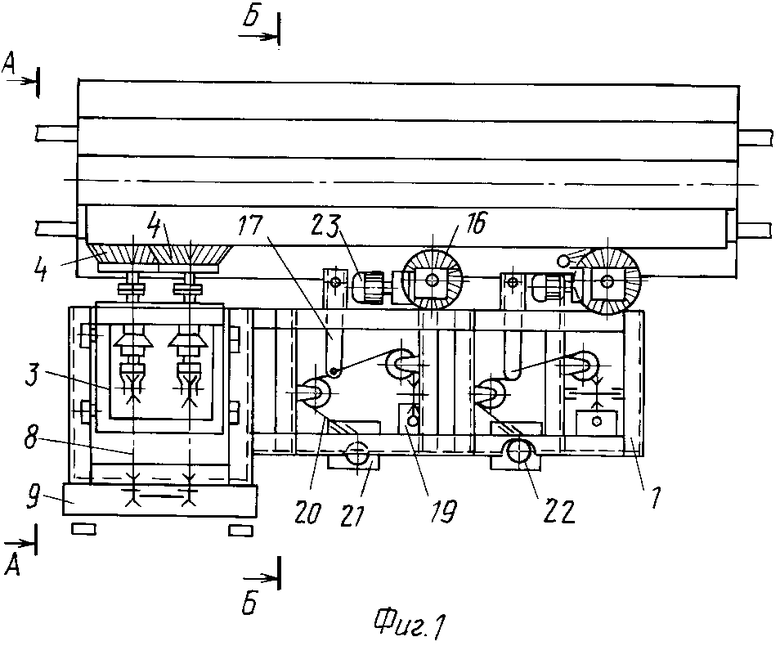
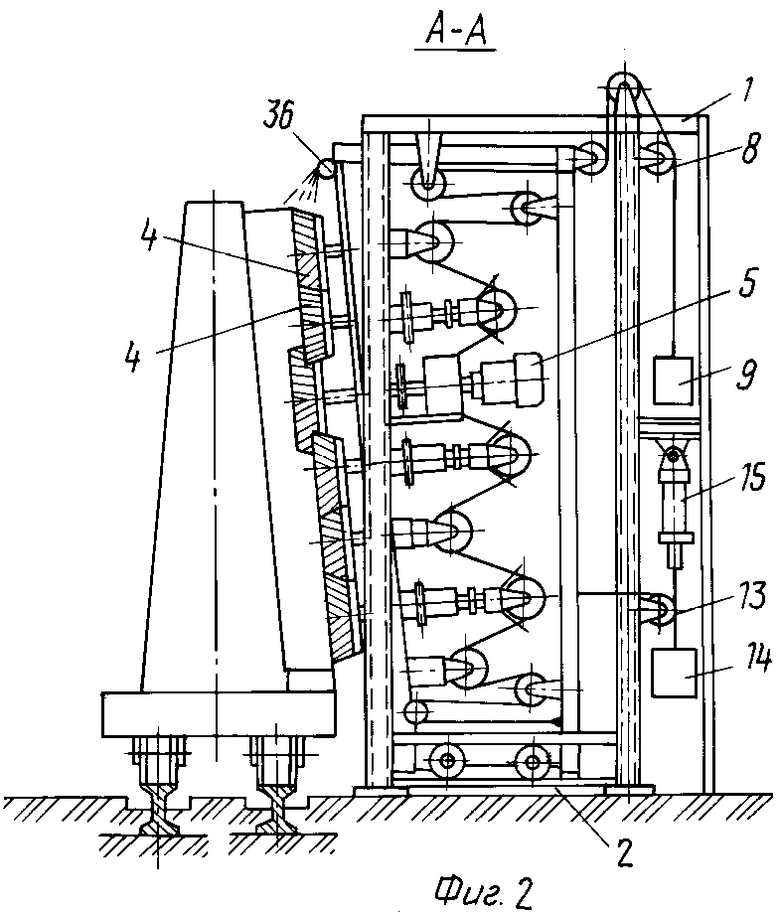
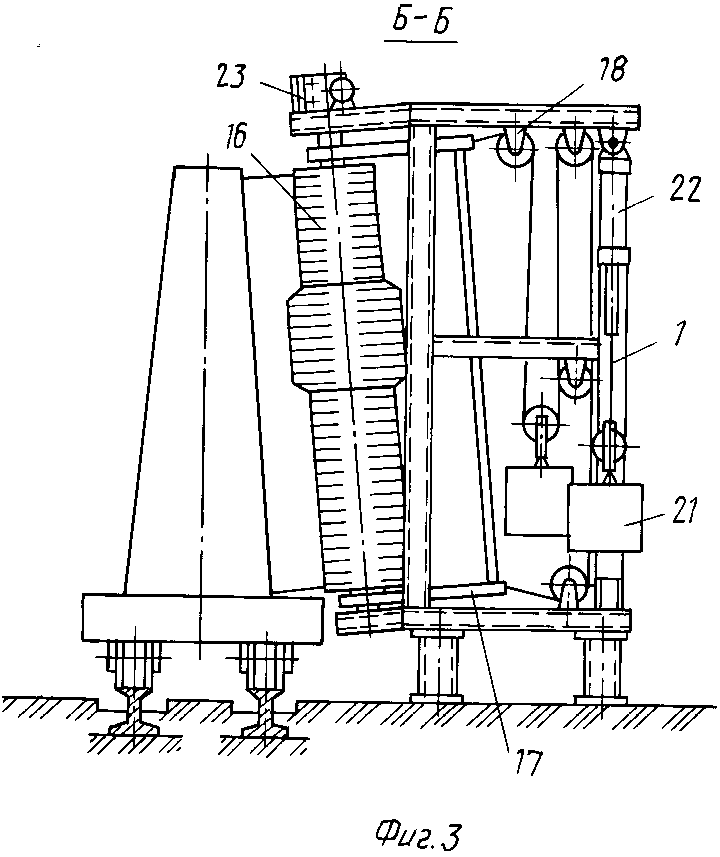
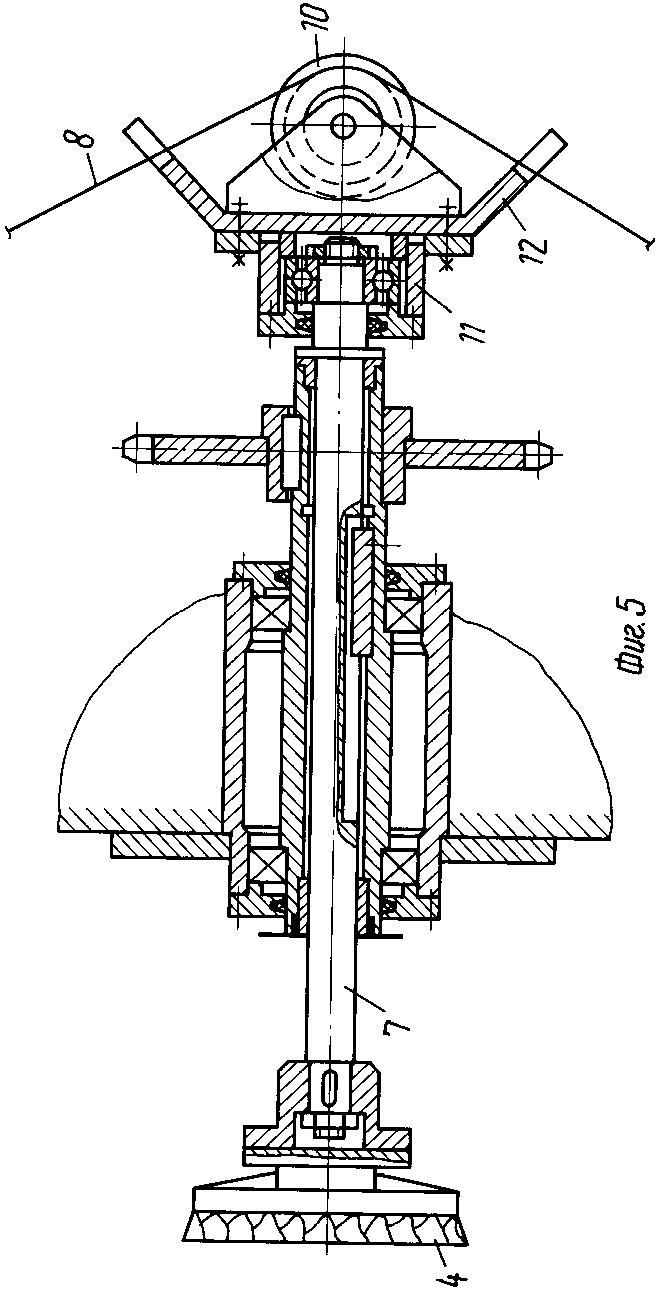
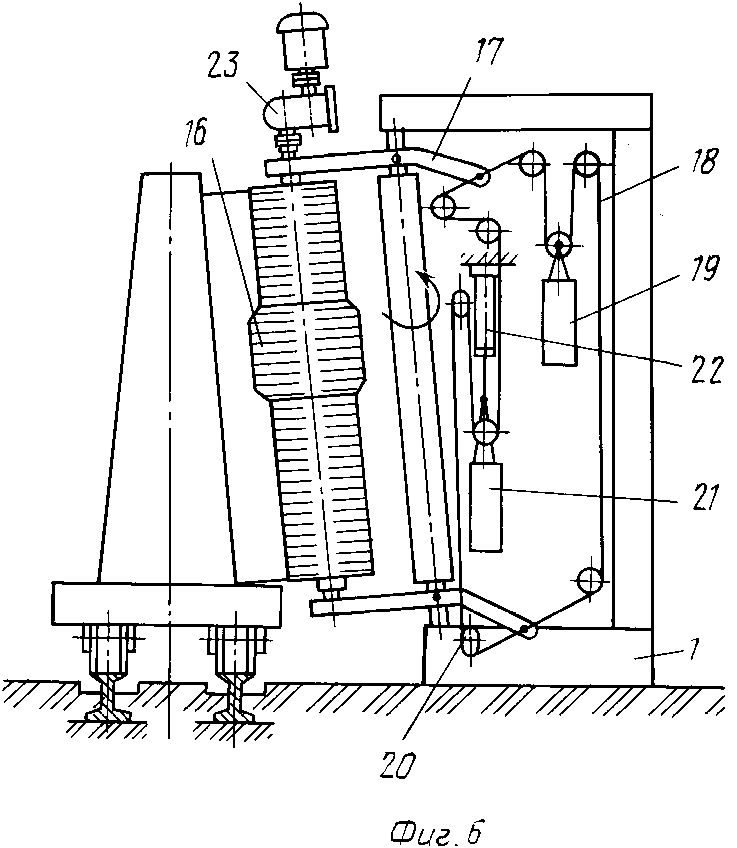
На фиг. 1 схематично изображена установка для обработки поверхности изделий из бетонных смесей, вид сверху; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - механизм прижима и отвода щеток (крайнее правое положение); на фиг. 5 - схема установки торцовой щетки; на фиг. 6 - схема установки цилиндрических щеток; на фиг. 7 - цилиндрическая щетка с механизмом осевого перемещения; на фиг. 8 - разрез В-В на фиг. 7.
Установка содержит раму 1, в горизонтальных направляющих 2 которой установлена каретка 3 с торцовыми щетками 4 для предварительной очистки изделия. Торцовые щетки изготовлены из стальной проволоки и имеют привод 5 с цепной передачей 6. Приводные валы 7 торцовых щеток 4 выполнены составными из наружных закрепленных на каретке 3 трубчатых и размещенных в них внутренних горизонтально подвижных частей. Торцовые щетки 4 имеют возможность перемещения в осевом направлении с помощью механизма их прижима и отвода. Механизм прижима торцовых щеток 4 выполнен в виде трособлочной системы 8 и противовеса 9, массу которого можно менять. Прижимные блоки 10 трособлочной системы 8 закреплены на свободных концах внутренних горизонтально подвижных частей приводных валов 7 торцовых щеток 4 посредством подшипников качения 11. Блоки 10 имеют обоймы 12 с пазами для прохода гибкой связи трособлочной системы 8, фиксирующей от поворота обойму. Гибкая связь трособлочной системы 8 одним концом прикреплена к каретке 3, а другим - соединена с противовесом 9. Механизм отвода торцовых щеток 4 выполнен в виде трособлочной системы 13 с противовесом 14. Гибкая связь трособлочной системы 13 закреплена одним концом к каретке 3, а другим - к силовому цилиндру 15, закрепленному на раме 1. Для чистовой обработки поверхности изделий служат две наклонные цилиндрические щетки 16, установленные на раме 1 посредством двуплечих рычагов 17. Подвод цилиндрических щеток 16 осуществляется трособлочной системой 18, закрепленной к свободным концам рычагов 17, и противовесом 19. Их отвод осуществляется трособлочной системой 20, противовесом 21 и силовым цилиндром 22. Щетки 16 могут быть выполнены резинотканевыми или из синтетических эластичных элементов и имеют привод 23. Цилиндрические щетки 16 свободно расположены на приводных валах 24, при этом на каждом из валов коаксиально расположены разнонаправленные цилиндрические винтовые пружины 25 растяжения - сжатия, наружные концы которых закреплены на втулках 26, установленных на валу 24 посредством скользящего соединения "шпонка-паз" с возможностью перемещения вдоль него. Внутренние концы пружин 25 жестко укреплены на ступицах 27 цилиндрического корпуса 28 щеток 16, свободно охватывающих приводной вал 24. Каждая цилиндрическая щетка снабжена механизмом осевого перемещения, который заключен в корпус. Вал 24 соединен с выходным поводком 29 механизма осевого перемещения, кинематически связанным с пальцем 30 сателлита 31, вал которого шарнирно соединен с водилом 32. Сателлит 31 находится в зацеплении с неподвижным зубчатым колесом 33, а водило 32 одним концом закреплено в подшипниковой опоре корпуса механизма осевого перемещения, другим связано через шатун 34 с кривошипом 35. закрепленным на конце приводного вала механизма осевого перемещения цилиндрической щетки 16. Кривошип 35 смещен относительно оси водила 32. Устройство оборудовано коллектором 36 с форсунками для струйной подачи промывочной жидкости.
Установка работает следующим образом.
Подводят каретку 3 с торцовыми щетками 4 к перемещаемому изделию. Для этого силовой цилиндр 15 поднимает противовес 14, противовес 9 опускается, и щетки 4 прижимаются к изделию. Каретка 3 продолжает перемещаться к изделию относительно торцовых щеток 4. Перемещение каретки 3 относительно торцовых щеток 4 происходит за счет разности усилий, действующих на них с помощью противовесов 9 и 14. По ходу перемещения изделия оно обрабатывается цилиндрическими щетками 16. Для их прижима необходимо включить силовой цилиндр 22, который с помощью трособлочной системы 20 поднимает противовес 21 и опускает противовес 19 с помощью трособлочной системы 18. В рабочем режиме обработки равномерное вращение от привода 23 передается кривошипу 35, который, вращаясь вокруг своей оси, передает движение шатуну 34, соединенному с ним водилу 32 и сателлиту 31, который вращается одновременно с этим водилом вокруг своей оси в результате взаимодействия с неподвижным зубчатым колесом 33. За счет того, что длина кривошипа 35 не равна длине водила 32, угловая скорость водила непостоянна по времени. При этом палец 30 сателлита 31 описывает сложную траекторию, которая характеризуется неравномерной скоростью его вращательного и поступательного движений относительно оси неподвижного колеса 33. Пальцы 30 передают суммарное сложное неравномерное движение через выходной поводок 29 валу 24 цилиндрической щетки 16.
Таким образом, щетка приводится в сложное движение с переменными угловыми и вертикальными линейными ускорениями внутри одного цикла. Создание заданного программируемого вращения и возвратно-поступательного перемещения цилиндрической щетки с переменным угловыми и вертикальными линейными ускорениями позволяет воздействовать на обрабатываемую поверхность изделий оптимальным образом, создавая необходимые параметры режима колебаний щетки. Заданный режим силового воздействия на щетку 16, в свою очередь, приводит к переменной деформации - возбуждению упругих элементов - пружин 25 (связывающих ее упруго с приводным валом 24) как в осевом направлении - вдоль вала 24, так и в угловом - вокруг вала 24, что, в конечном счете, проявляется в непрерывном автоколебании цилиндрической щетки 16 в осевом - с амплитудой ±Δ и в угловом - с амплитудой ±α направлениях при одновременном одностороннем непрерывном вращении щетки. Такое осциллирующее движение цилиндрической щетки повышает ее активность в зоне контакта с поверхностью изделия, очистные эластичные элементы более полно охватывают поверхность в зоне контакта, без микропропусков. При сложном характере движения механической системы вал - винтовая пружина - цилиндрическая щетка с переменными угловыми и вертикальными линейными ускорениями, за счет силового давления и за счет изменяющейся силы трения эластичных элементов щетки с поверхностью изделия, суммарный динамический момент массы подвижного щеточного рабочего органа и центробежный момент инерции носят в фиксированном интервале времени непостоянный характер. Совокупность указанных факторов при изменяющихся их текущих значениях с учетом годографа движения рабочего органа очистки влечет за собой изменение границ поступательных и угловых колебаний упругих связей между валом и цилиндрической щеткой, причем с большими вариациями амплитуд и частот этих колебаний, быстрыми их изменениями. Цилиндрическая щетка при своем вращении приобретает бигармонические колебания. При этом гармоника перемещения эластичных элементов щетки, силовое поле их воздействия и рисунок скольжения по контурной площадке касания поверхности изделия способствует качественному выполнению технологической операции очистки и к существенному сокращению времени на ее обработку. В силу того, что закон движения выходного поводка 29 позволяет создать на небольшом отрезке цикла неравномерности значительные ускорения рабочего органа очистки, появляется возможность использования винтовых пружин 25 с различной жесткостью по концам приводного вала 24. В этом случае, при сложных перемещениях цилиндрической щетки, воздействия сил инерции и трения, обеспечивается различное формирование угла вибрации цилиндрического корпуса 28 щетки 16 относительно узлов заделки упругих элементов - пружин с валом и модуля их колебаний. В результате щетка при сложных перемещениях приобретает эллиптические колебания, зона воздействия эластичных элементов щетки на поверхность изделия увеличивается, интенсифицируется процесс очистки.
Конструктивные особенности установки для обработки поверхности изделий из бетонных смесей позволяют улучшить ее эксплуатационные и технологические возможности, повысить производительность и снизить затраты труда.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1992 |
|
RU2012495C1 |
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1992 |
|
RU2012494C1 |
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1992 |
|
RU2012496C1 |
| РАБОЧИЙ ОРГАН УСТРОЙСТВА ДЛЯ МОЙКИ АВТОМОБИЛЕЙ | 1991 |
|
RU2017640C1 |
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1992 |
|
RU2011518C1 |
| РАБОЧИЙ ОРГАН УСТРОЙСТВА ДЛЯ МОЙКИ АВТОМОБИЛЕЙ | 1991 |
|
RU2014240C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ЗАЧИСТКИ ПОВЕРХНОСТЕЙ | 1991 |
|
RU2024334C1 |
| РАБОЧИЙ ОРГАН УСТРОЙСТВА ДЛЯ МОЙКИ АВТОМОБИЛЕЙ | 1991 |
|
RU2014239C1 |
| БУНКЕР ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ | 2003 |
|
RU2250188C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ВОЗДУХА | 2002 |
|
RU2234969C2 |



Сущность изобретения: установка содержит каретку с торцовыми щетками и цилиндрические щетки 16. Торцовые и цилиндрические щетки снабжены механизмами их прижима и отвода. Каждая из цилиндрических щеток снабжена механизмом ее осевого перемещения. Механизм осевого перемещения щетки 16 выполнен в виде сателлита 31 с пальцем 30, неподвижного зубчатого колеса 33 с водилом 32, кривошипа 35 и поводка 29. Поводок вала 24 щетки 16 кинематически соединен с пальцем 30 сателлита 31. Вал сателлита шарнирно соединен с водилом 32. Сателлит 31 находится в зацеплении с неподвижным зубчатым колесом 33. Водило 32 одним концом закреплено в опоре корпуса механизма осевого перемещения, а другим соединено через шатун 34 с кривошипом 35. Кривошип жестко закреплен на валу привода и расположен со смещением относительно оси водила 32. Положительный эффект: создание заданного программируемого вращения и возвратно - поступательного перемещения цилиндрической щетки с переменными угловыми и вертикальными линейными ускорениями позволяет воздействовать на обрабатываемую поверхность оптимальным образом, создавая необходимые параметры режима колебаний щетки, что существенно повышает качество обработки поверхностей изделий из бетонных смесей. 8 ил.
УСТАНОВКА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ, содержащая раму, в горизонтальных направляющих которой размещена каретка с торцевыми приводными щетками и механизмами их прижима к изделию и отвода, наклонные цилиндрические щетки, смонтированные на раме посредством двуплечих рычагов, свободные концы которых соединены с подводящей и отводящей трособлочными системами с противовесами и силовым цилиндром, при этом приводные валы торцевых щеток выполнены составными, механизм прижима - в виде трособлочной системы с противовесом, часть блоков которой установлена на свободных концах приводных валов торцевых щеток посредством подшипников качения, а другая часть блоков - на раме и каретке, механизм отвода торцевых щеток выполнен в виде смонтированных на раме отклоняющего блока, силового цилиндра и противовеса, противовес и каретка соединены со штоком силового цилиндра посредством гибкой связи, огибающей отклоняющий блок, отличающаяся тем, что каждая цилиндрическая щетка снабжена механизмом осевого перемещения, выполненным в виде корпуса, в котором размещены сателлит с пальцем, неподвижное зубчатое колесо, водило, поводок, кинематически соединенный с пальцем сателлита, вал которого шарнирно соединен с водилом, причем сателлит контактирует с неподвижным зубчатым колесом, водило одним концом закреплено в опоре корпуса, а другим соединено через шатун с кривошипом, размещенным со смещением относительно оси водила, при этом вал каждой наклонной щетки со стороны привода жестко соединен с кривошипом.
