Изобретение относится к подъемно-транспортному машиностроению, в частности к пневматическим подъемникам, и может быть использовано в различных отраслях народного хозяйства, например, для подъема и перемещения изделий и грузов.
Известен подъемник, содержащий привод и грузовой орган, снабженный катками и взаимодействующий с внешней поверхностью эластичного рукава, связанного с нижним и верхним концами насосной станции. При этом в рукаве установлен с возможностью перемещения движитель грузового органа, содержащий эластичную оболочку, выполненную в виде тора.
Наиболее близким к изобретению по технической сущности и достигаемому результату является выбранный в качестве прототипа подъемника включающий поворотное основание со стойкой, шарнирно соединенную со стойкой и установленную с возможностью ограниченного поворота в вертикальной плоскости стрелу, механизм для поворота стрелы и грузоподъемный орган с приводом.
Недостатком известных технических решений является недостаточная надежность работы привода грузозахватного органа.
В основу изобретения поставлена техническая задача по созданию пневматического подъемника описанного выше типа, с приводом грузозахватного органа, конструкция которого обеспечивала бы высокую надежность работы устройства.
Такая техническая задача решается посредством пневматического подъемника, включающего поворотное основание со стойкой, шарнирно соединенную со стойкой и установленную с возможностью ограниченного поворота в вертикальной плоскости стрелу, механизм для поворота стрелы и грузозахватный орган с приводом. При этом, согласно изобретению, привод грузозахватного органа в таком пневматическом подъемнике выполнен в виде закрепленного на стреле полого цилиндрического корпуса с отверстием для прохода грузозахватного органа, гибкого рукава, размещенного во внутренней полости корпуса приводного барабана и сообщенного с внутренней полостью корпуса источника для подачи рабочего агента под давлением. При этом гибкий рукав намотан на приводной барабан, а свободный конец гибкого рукава вывернут наизнанку и герметично закреплен на корпусе по периметру его отверстия для прохода грузозахватного органа, причем грузозахватный орган размещен во внутренней полости гибкого рукава и жестко соединен с последним.
Предлагаемая конструкция привода грузозахватного органа гарантирует высокую надежность работы устройства и обеспечивает необходимую грузоподъемность.
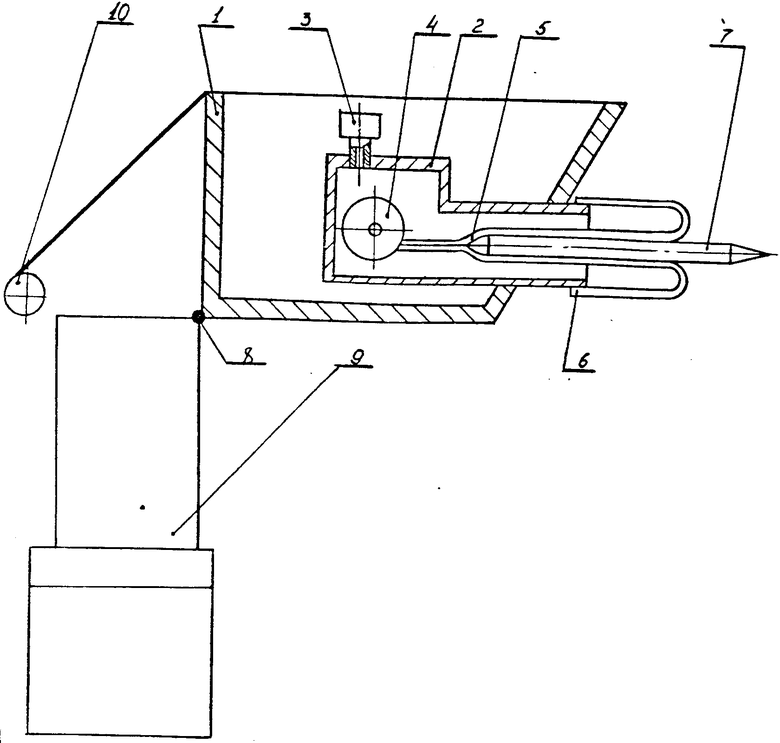
На чертеже изображен предлагаемый пневматический подъемник.
Пневматический подъемник состоит из стрелы 1, на которой закреплен полый цилиндрический корпус 2, сообщенный с источником 3 для подачи рабочего агента под давлением. Во внутренней полости цилиндрического корпуса 2 размещен приводной реверсивный барабан 4, на котором намотан гибкий рукав 5, и его свободный конец 6 вывернут наизнанку и закреплен герметично на корпусе 2 по периметру его отверстия (не обозначено) для прохода грузозахватного органа 7, который размещен во внутренней полости гибкого рукава 5 и жестко соединен с ним. Стрела 1 с помощью шарнира 8 соединена со стойкой 9, установленной на поворотном основании (не обозначена). Механизм 10 обеспечивает ограниченный поворот стрелы 1 в вертикальной плоскости.
Предлагаемый пневматический подъемник работает следующим образом.
Поворачивая стойку 9 на заданный угол, опускают стрелу 1. От источника 3 подают в полость цилиндрического корпуса 2 рабочий агент под давлением, например газ или воздух. Гибкий рукав 5 начинает перемещаться вперед. В необходимом месте к установленному в гибком рукаве 5 грузозахватному органу 7 крепят груз. Затем начинают наматывать гибкий рукав 5 на барабан 4. Рабочий агент вытесняется рукавом 5 к источнику 3 и груз входит в рукав 5. После прохода груза к цилиндрическому корпусу 2 стрелу 1 поднимают в вертикальное положение и, если груз необходимо поднять вверх, подают рабочий агент от источника 3 в полость корпуса 2. Рукав 5 поднимается вверх до тех пор, пока груз не выйдет из него.
Если груз необходимо переместить в горизонтальной плоскости, то стойку 9 проворачивают на заданный угол. Затем механизмом 10 опрокидывают стрелу 1 и подают от источника 3 рабочий агент в полость корпуса 2. Гибкий рукав 5 перемещается вперед до тех пор, пока груз не выйдет из него. После этого возвращают рукав 5 и стрелу 1 в исходное положение. (56) Авторское свидетельство СССР N 537923, кл. В 66 В 9/04, 1975.
Авторское свидетельство СССР N 445614, кл. В 66 Г 3/24, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК | 1991 |
|
RU2048396C1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1991 |
|
RU2012539C1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1991 |
|
RU2012538C1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1991 |
|
RU2048415C1 |
| ПОДЪЕМНИК | 1991 |
|
RU2092420C1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ПЛОДОВ И ОВОЩЕЙ | 1991 |
|
RU2048126C1 |
| ГЛУБИННЫЙ УПЛОТНИТЕЛЬ БЕТОНА | 1992 |
|
RU2023836C1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1991 |
|
RU2040456C1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ ВЫРАБОТКИ В ГРУНТЕ | 1991 |
|
RU2015260C1 |
| ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК | 1991 |
|
RU2049713C1 |
Сущность изобретения: пневматический подъемник содержит поворотное основание со стойкой, стрелу, механизм для поворота стрелы и грузозахватный орган с приводом. Стрела шарнирно соединена со стойкой и установлена с возможностью ограниченного поворота в вертикальной плоскости. Привод грузозахватного органа выполнен в виде полого цилиндрического корпуса, гибкого рукава, приводного барабана и источника для подачи рабочего агента. Приводной барабан размещен внутри корпуса. Источник для подачи рабочего агента сообщен с внутренней полостью корпуса. Гибкий рукав намотан на приводной барабан. Свободный конец гибкого рукава вывернут наизнанку и герметично закреплен на корпусе. Грузозахватный орган размещен во внутренней полости гибкого рукава и жестко соединен с последним. 1 ил.
ПНЕВМАТИЧЕСКИЙ ПОДЪЕМНИК, включающий поворотное основание со стойкой, шарнирно соединенную со стойкой и установленную с возможностью ограниченного поворота в вертикальной плоскости стрелу, механизм для поворота стрелы и грузозахватный орган с приводом, отличающийся тем, что привод грузозахватного органа выполнен в виде закрепленного на стреле полого цилиндрического корпуса с отверстием для прохода грузозахватного органа, гибкого рукава, размещенного во внутренней полости приводного барабана и сообщенного с внутренней полостью корпуса источника для подачи рабочего агента под давлением, при этом гибкий рукав намотан на приводной барабан, а свободный конец гибкого рукава вывернут наизнанку и герметично закреплен на корпусе по периметру его отверстия для прохода грузозахватного органа, причем грузозахватный орган размещен во внутренней полости гибкого рукава и жестко соединен с последним.
