Изобретение относится к технике строительства подземных коммуникаций, а именно к управляемым устройствам для проходки скважин способом раскатки.
Известно устройство для образования скважин в грунте раскаткой, содержащее приводной вал с установленными на нем катками, двигатель, систему управления с валиком и приспособление для изменения направления раскатки [1] .
Недостатком этого устройства является наличие сил трения при его перемещении, что снижает скорость проходки скважины.
Наиболее близким к предлагаемому по технической сущности и достигаемому эффекту является устройство для образования скважин в грунте раскаткой, содержащее приводной вал с установленными на эксцентриковых втулках катками, двигатель, систему управления и приспособление для изменения направления раскатки, выполненное в виде конусного головного катка с валом, связанным с приводным валом шарнирной муфтой.
Недостатком этого устройства является низкая надежность и долговечность из-за износа уплотнительных колец, установленных между вращающимися катками. Кроме того, устройство не обеспечивает дистанционного автоматического управления в процессе его движения, за счет чего снижается точность проходки скважин.
Цель изобретения - повышение надежности и долговечности работы, а также повышение точности проходки скважин.
Указанная цель достигается тем, что в устройстве для образования скважин в грунте раскаткой, содержащем приводной вал с установленными на эксцентриковых втулках катками, двигатель, систему управления и приспособление для изменения направления раскатки, выполненное в виде конусного головного катка с валом, связанным с приводным валом шарнирной муфтой, эксцентриковые втулки и катки выполнены со сферическими поверхностями, взаимодействующими между собой, при этом вал головного катка снабжен подпружиненным наконечником, соединенным с подвижной сферической опорой, взаимодействующей со штоком гидроцилиндров, вмонтированных в неподвижной трубе внутри приводного вала, система управления приспособлением для изменения направления раскатки дополнительно включает гироскопический датчик для регистрации отклонения устройства в вертикальной и горизонтальной плоскостях и датчик для фиксации его расстояния прохождения в скважине.
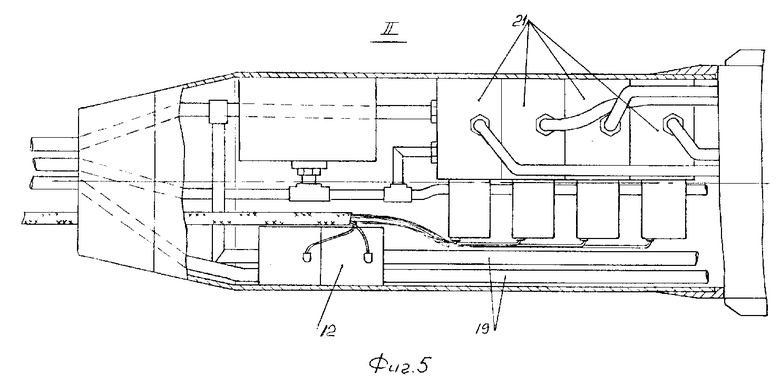
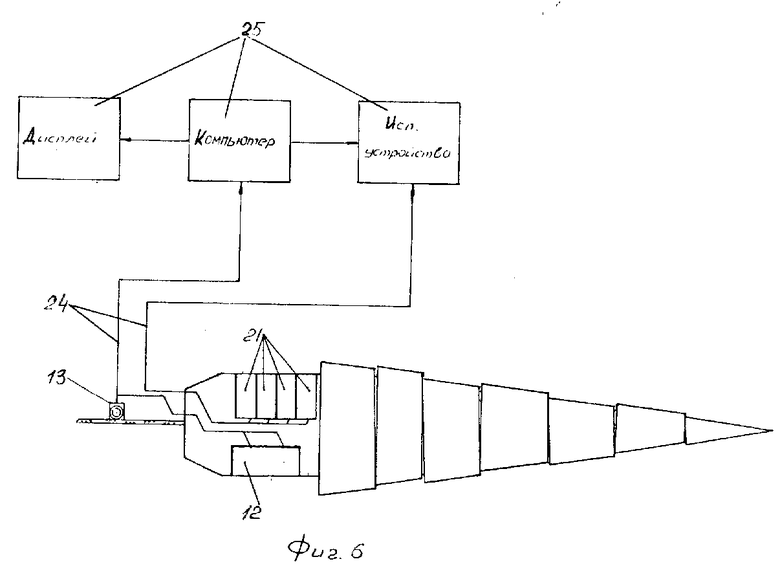
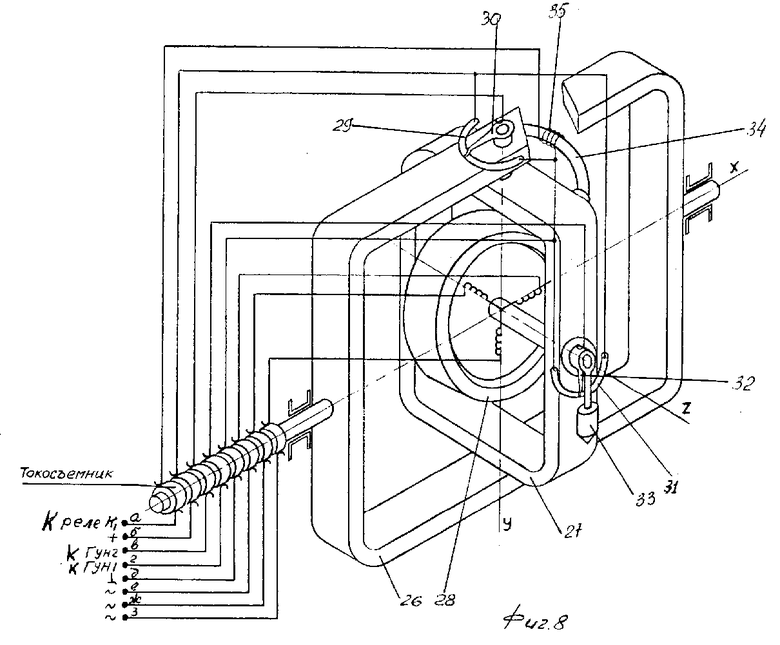
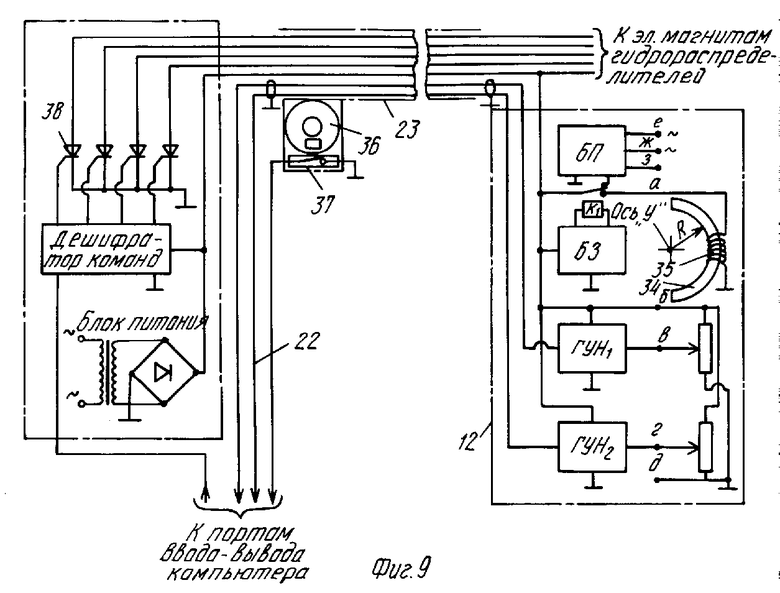
На фиг. 1 изображен общий вид устройства для образования скважин в грунте раскаткой; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 3; на фиг. 5 - узел II на фиг. 1; на фиг. 6 - принципиальная схема подключения устройства к исполнительной и регистрирующей аппаратуре; на фиг. 7 - принципиальная электрическая и гидравлическая схема управления конусного головного катка; на фиг. 8 - схема гироскопического датчика; на фиг. 9 - электрическая схема подключения гироскопического датчика и датчика фиксации расстояния к исполнительной и регистрирующей аппаратуре.
Устройство содержит приводной вал 1 с установленными на эксцентриковых втулках 2 катками 3, двигатель 4, систему управления и приспособление для изменения направления раскатки, выполненное в виде конусного головного катка 5 с валом 6, связанным с приводным валом 1 шарнирной муфтой 7.
Эксцентриковые втулки 2 и катки 3 выполнены со сферическими поверхностями, взаимодействующими между собой, при этом вал 6 головного катка 5 снабжен подпружиненным наконечником 8, снабженным подвижной сферической опорой 9, взаимодействующей со штоками гидроцилиндров 10, вмонтированных в неподвижной трубе 11, установленной в приводном вале 1. Система управления приспособление для изменения направления раскатки дополнительно включает гироскопический датчик 12 для регистрации отклонения устройства в вертикальной и горизонтальной плоскостях и датчик 13 для фиксации расстояния его прохождения в скважине.
Устройство снабжено задавливающим приспособлением, выполненным в виде вращающейся обечайки 14 со спиральной лопастью 15, взаимодействующей со стенками скважины и приводимой во вращение от двигателя 4 через планетарный редуктор, включающий подвижные 16 и неподвижные 17 водила и сателлиты 18. Трубки 19 для подачи жидкости к гидроцилиндрам 10 пропущены через неподвижную трубу 11 и неподвижные водила 17 планетарного редуктора и подсоединены к гирораспределителям 21, установленным в хвостовой части устройства. Шарнирная муфта 7 выполнена в виде шарнира Гука. Между эксцентриковыми втулками 2 головного катка 5 и смежного с ним катка 3 установлена промежуточная шаровая опора 22. Вал 6 головного катка 5 выполнен полым, в нем помещена пружина 23, взаимодействующая с торцом наконечника 8. Гироскопические датчики 12, датчик 13 и гирораспределители 21 подключены с помощью электрокабеля 24 к исполнительной регистрирующей аппаратуре 25 (фиг. 6).
Гироскопический датчик включает гироскоп с тремя степенями свободы (фиг. 8), состоящий из рамки 26 со степенью свободы по оси х, рамки 27 со степенью свободы по оси у и гиромотора 28, ось вращения которого - по оси z. На раме 26 закреплен потенциометр для фиксации отклонения устройства в горизонтальной плоскости, включающий резистор 29 и щетку 30, жестко закрепленную на рамке 27 и размещенную на оси у. На рамке 27 закреплен потенциометр для фиксации отклонения устройства в вертикальной плоскости, включающий резистор 31 и щетку 32, закрепленную на маятнике 33. На рамке 27 установлен электромагнит 35 на сердечнике 34, которой жестко прикреплен к рамке. Центр радиуса сердечника 34 совпадает с осью у.
Гиродатчик работает следующим образом.
При включении блока питания (фиг. 9) исполнительного устройства срабатывает блок задержки (БЗ) отключения реле К1, при этом через контактную группу реле К1 напряжение поступает на обмотку электромагнита 35, сердечник 34 устанавливает рамку 27 перпендикулярно оси устройства для начала отсчета координат отклонения устройства в горизонтальной плоскости. После отключения реле К1 его контактная группа отключает обмотку электромагнита 35 и подает напряжение на блок питания (БП) гиромотора. После того как ротор гиромотора 28 набрал обороты, устройство готово к проходке скважин.
Напряжение с щеток 30 и 32 подается соответственно на генераторы, управляемые напряжением (ГУН1 и ГУН2). При изменении положения устройства в горизонтальной и вертикальной плоскостях изменяются потенциалы на щетках 30 и 32 за счет изменения положения рамки 27 и маятника 33, соответственно изменяются частоты на выходах ГУН1 и ГУН2, которые фиксируются портом ввода компьютера (фиг. 6). На порт ввода компьютера поступает информация от датчика расхода расстояний проходки устройства в грунте.
Датчик расхода расстояний состоит из ролика 36, постоянного магнита, вмонтированного в ролик, и герконового реле 37 (фиг. 9). Датчик устанавливается на дневной поверхности и его ролик 36 контактирует с кабелем или тросом (фиг. 6). При движении устройства в грунте каждый оборот ролика фиксируется герконовым реле 37.
Работа исполнительного устройства осуществляется следующим образом.
Компьютер, считывая показания с гиродатчика 12 и датчика 13 расхода расстояния управляют дешифратором команд, установленным в исполнительном устройстве. Дешифратор команд подключает напряжение через тиристоры 38 к одной или нескольким обмоткам электромагнитов гирораспределителей 21 в соответствии с заложенной в компьютер программой траектории движения устройства в грунте.
Устройство работает следующим образом.
Перед запуском устройства электрокабель 24 от электромагнитных гирораспределителей 21 и гироскопических датчиков 12 и датчика 13 подключают к исполнительной и регистрирующей аппаратуре (фиг. 6 и 9). Затем устройство вводится в предварительно подготовленное конусное углубление в грунте и включатся двигатель 4. Крутящий момент от последнего (фиг. 3) передается через планетарный редуктор, включающий шестерню 39, сателлиты 18, подвижное водило 16, от которого через шестерню 40 и сателлиты 18 (фиг. 4) - на центральное солнечное колесо 41 и далее через ступицу 42 на приводной вал 1. От центрального колеса 41 крутящий момент через сателлиты 18, подвижное водило 16, неподвижное водило 17 передается на обечайку 14. Крутящий момент на вал 6 головного катка 5 передается через ведущий вал 1 и закрепленный к нему шарнир Гука. Таким образом одновременно происходит самозавинчивание в грунт конических катков 3,5 и спиральной лопасти 15.
Самозавинчивание лопастей 15 в уплотненные стенки скважины создает постоянное поддавливание устройства к забою, обеспечивая постоянную скорость его движения в любых грунтах с разным гранулометрическим составом и влажностью.
При отклонении движения устройства в горизонтальной и вертикальной плоскостях от проектной траектории, заложенной в программу компьютера, сигнал от гироскопического датчика через компьютер подается на исполнительное устройство, которое автоматически переключает электромагниты одного из четырех гирораспределителей 21 (фиг. 7), и поток жидкости по питающим трубкам 19 подается в гидроцилиндры 10, которые поворачивают головной каток 5 в нужное направление для вывода устройства в проектное положение.
При включении одного или нескольких гирораспределителей 21 жидкость по трубкам 19 поступает в поршневую полость гидроцилиндров 10, которые управляют головным катком. При отключении одного или нескольких электромагнитов гирораспределителей 21 за счет кинематической связи штоков гидроцилиндров 10 головной каток 5 устанавливается в нужное направление, а жидкость из поршневой полости гидроцилиндров 10 протекает через отключенный гирораспределитель 21 на выход гиросистемы.
Отклонение устройства от проектной траектории фиксируется на дисплеи визуально, что позволяет оператору следить за движением устройства. Применение предлагаемого устройства позволяет повысить надежность и долговечность его работы за счет исключения уплотнительных колец между катками, а также повысить точность проходки скважин за счет автоматического и дистанционного управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ МЕТОДОМ РАСКАТКИ | 1993 |
|
RU2054506C1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 1991 |
|
RU2023117C1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 1990 |
|
RU2023116C1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИНЫ В ГРУНТЕ МЕТОДОМ РАСКАТКИ | 1993 |
|
RU2053332C1 |
| УСТРОЙСТВО ДЛЯ РАСКАТКИ СКВАЖИН В ГРУНТЕ | 1997 |
|
RU2121546C1 |
| Установка для бестраншейной прокладки коммуникаций, раскатчики для образования и расширения скважин, приспособление для центрирования вала раскатчика с приводной штангой | 2002 |
|
RU2221128C1 |
| РАСКАТЧИК ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 2008 |
|
RU2383687C1 |
| УСТРОЙСТВО ДЛЯ ПРОКЛАДКИ ГИБКИХ ЭЛЕМЕНТОВ | 1992 |
|
RU2025853C1 |
| РАСКАТЧИК ДЛЯ ОБРАЗОВАНИЯ ЛИДЕРНОЙ СКВАЖИНЫ В ГРУНТЕ | 2008 |
|
RU2379429C1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ ГРУНТОВОГО АНКЕРА | 1991 |
|
RU2024684C1 |

Сущность изобретения: устройство содержит двигатель, полый приводной вал, эксцентриковые втулки, катки, приспособление для изменения направления раскатки, систему управления приспособлением для изменения направления раскатки и механизм подачи. Двигатель кинематически связан с приводным валом. Приспособление для изменения направления раскатки содержит вал, сферический шарнир, головной каток и механизм для поворота головного катка. Механизм подачи выполнен в виде обечайки с лопастями для взаимодействия со стенками образуемой скважины и планетарного редуктора. Механизм для поворота головного катка выполнен в виде гидроцилиндров, шаровой опоры и гидрораспределителей. Одним торцом шаровая опора шарнирно соединена с валиком сферического шарнира, а другим торцом - со штоками гидроцилиндров. 3 з. п. ф-лы, 9 ил.
