Изобретение относится к строению двигателей и компрессоров и может быть использовано в пищевой, энергетической, авиационной промышленности, например, для подачи сухого воздуха, в качестве пневмопривода, пневмоинструмента, пневмокомпрессора.
Известна роторная машина объемного вытеснения, состоящая из статора, коаксиального с ним ротора и шибера, вставленного в паз ротора, причем внутренняя поверхность статора образована телом вращения сложной формы. Недостаток данной конструкции - сложность ее изготовления, т. к. получение вышеуказанной внутренней поверхности статора сопряжено со значительными технологическими трудностями.
Известна роторная машина, содержащая статор, внутренняя поверхность которого образована цилиндрической поверхностью с большим радиусом R и фигурной поверхностью, включающей цилиндрическую поверхность с малым радиусом r, меньшим, чем R и двумя переходными участками между ними, в зоне которых расположены впускные и выпускные отверстия для рабочего тела, соосный со статором ротор с шибером, причем шибер имеет длину, равную длине рабочей камеры статора, ширину, равную сумме малого и большого радиусов цилиндрических поверхностей, и установлен пазу ротора с возможностью перемещения, а паз проходит через ось вращения ротора. Статор выполнен в виде втулки с внутренним диаметром, равным удвоенному большому радиусу с жестко установленным в ней серповидным вкладышем, внешняя поверхность которого выполнена цилиндрической с радиусом, равным большому радиусу, а радиус внутренней цилиндрической поверхности равен малому радиусу.
Недостаток известной конструкции - сложность ее изготовления из-за сложности изготовления криволинейных внутренних поверхностей статора.
Цель изобретения - упрощение изготовления роторной машины.
Сущность изобретения основана на том, что обрабатывать наружные поверхности, имеющие форму, образованную телом вращения (цилиндр), значительно легче, чем внутренние криволинейные поверхности.
Поставленная цель достигается тем, что в известной роторной машине переходные участки имеют радиус, определяемый из формулы
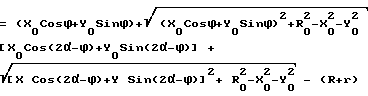
Ro=  , где l = (R + r)/2;
, где l = (R + r)/2;
Хo и Yo - координаты центра вращения образующей цилиндрической поверхности;
α - половина угла, заключенного между прямыми, исходящими из центра сечения машины к концам переходного участка.
Среди известных источников информации авторами не найдено решения, в котором эта поверхность была бы представлена как образованная тремя участками, каждый из которых - цилиндр (далее приводится обоснование того, что переходный участок можно описать окружностью), что существенно для заявляемой конструкции и приводит к достижению поставленной цели (упрощение изготовления) в совокупности с выполнением статора в виде двух деталей.
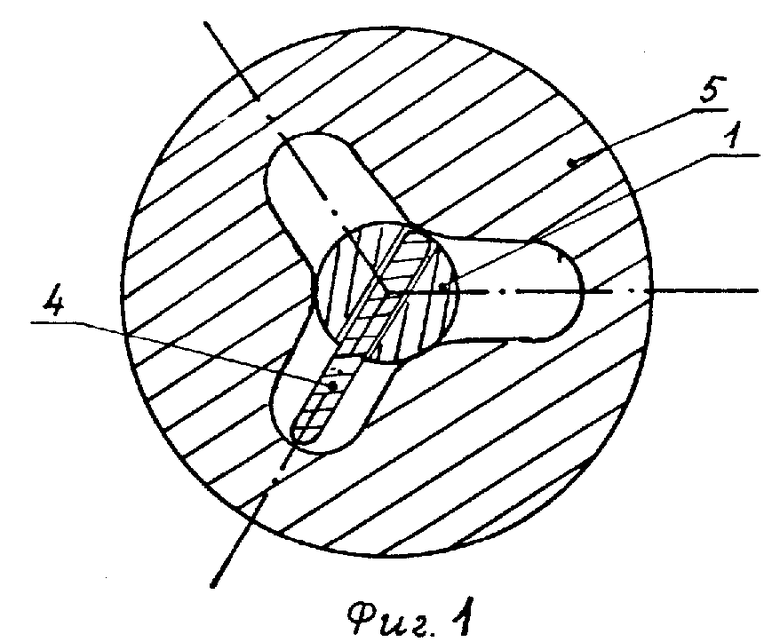
На фиг. 1 показана роторная машина, поперечное сечение; на фиг. 2 и 3 иллюстрируется обоснование того, что переходный участок внутренней поверхности статора в сечении можно описать окружностью.
Предлагаемая конструкция состоит из коаксиально установленных ротора 1 и статора, представляющего собой жесткое соединение цилиндрической его части 2 и серповидного вкладыша 3, взамен статора из прототипа (фиг. 2), а также шибера 4, установленного в пазу ротора 1 и проходящего через ось его вращения. Вкладыш 3 жестко соединяется своей наружной поверхностью с внутренней поверхностью цилиндрической части статора. Ротор 1 представляет собой вал диаметром d = 2r. Цилиндрическая часть 2 статора представляет собой отрезок трубы внутренним диаметром D = 2R. Шибер 4, длина которого равна длине ротора, а ширина L = R + r и толщина S, имеет скругление радиусом S/2 на скользящих по внутренней поверхности статора торцах. Шибер 4 установлен в паз ротора 1 по скользящей или ходовой посадке. Фигурная поверхность вкладыша образована тремя участками - двумя крайними (переходные участки (аd) и (сb) c радиусом Ro и средним (сd) радиусом r.
В стенке статора выполнены два сквозных отверстия (А - входное и Б - выходное), проходящие как сквозь цилиндрическую его часть 2, так и сквозь серповидную 3, таким образом, что расстояние (по прямой) между каналами на выходе их в полость статора в области переходных участков (аd и сb) должно быть не больше, чем R + r.
Машина работает следующим образом. В канал А подается газ под давлением. Давление газа на шибер заставляет поворачиваться ротор, при этом камера 6 расширяется, а камера 7 - уменьшается, газ из камеры 7 выталкивается через канал Б. Так как расстояние между каналами на выходе их в полость выбрано не более R + r, то во время вращения ротора не возникает прямых связей между входным и выходным каналами.
При вращении ротора рабочий конец шибера, разделяющий камеры расширения и сжатия, прижимается к поверхности статора. При необходимости на концах шибера могут быть установлены плоские уплотнительные пластины по типу поршневых колец двигателей внутреннего сгорания.
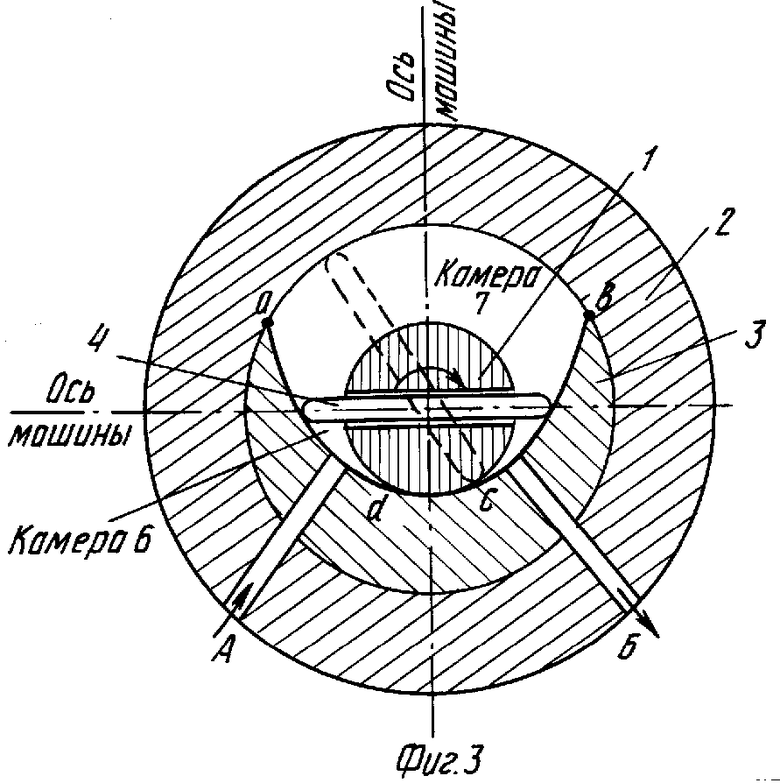
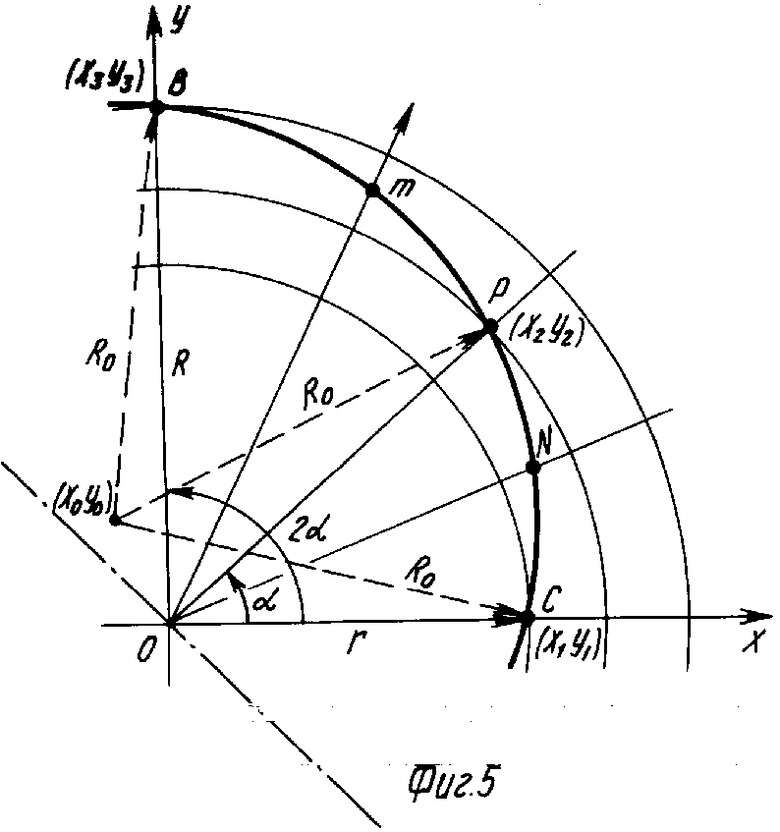
На фиг. 3 изображено сечение статора, где:
Rn и Rл - ширина правой и левой частей прибора;
Х1 и Y1 - координаты конца переходного участка в точке С;
Х3 и Y3 - координаты конца переходного участка в точке В;
Х2 и Y2 - координаты точки Р, в которой Rп = Rл;
Ro - радиус окружности, описывающей переходный участок;
Хo и Yo - координаты центра окружности, описывающей переходный участок;
ϕ - текущий угол, отсчитываемый от начала переходного участка;
2 . α - угол, которому соответствует дуга переходного участка cd (или аd).
На фиг. 3 более детально показан правый переходный участок при 2 α = 90o. При этом ось симметрии сечения повернута против часовой стрелки до совмещения точки С на фиг. 4 с осью Х на фиг. 5. Обращаясь к фиг. 3, приведем доказательство того, что переходная кривая может быть образована окружностью.
При вращении ротора с шибером оба конца шибера должны контактировать с поверхностью статора (с зазором, определяемым допусками на изготовление и сборку машины, а также условиями термического расширения деталей при работе). Это означает, что расстояние между точками пересечения линии, проведенной через ось ротора, с внутренней поверхностью статора должно быть неизменным по всем направлениям и равным R+r.
Покажем, что данное условие выполняется, если переходные участки описываются спиралью Архимеда. Уравнение спирали Архимеда имеет вид:
ρ= G˙β, (1) где ρ - радиус-вектор, описывающий спираль;
G - константа, определяющая скорость возрастания радиус-вектора;
β - угол, определяющий положение радиус-вектора на спирали
Если β = ϕ + βo, тo ρ= G(ϕ+βo)= G x
xϕ +G1.
В нашем случае (фиг. 5) ρ меняется от r до R, а ϕ от 0 до 2 α т. е. при ϕ = 0, G1 = r, при ϕ = 2α, G = (R-r)/2 α .
Таким образом, уравнение (1) принимает вид:
ρ = ϕ . (R - r) / 2 α + r. (2)
Определим ширину шибера L, которая удовлетворяет уравнению (2). Так как ширина шибера равна Rn + Rл, то с учетом симметрии конструкции:
L = ρ 2α-ϕ + ρ ϕ ; отсюда:
L = R + r.
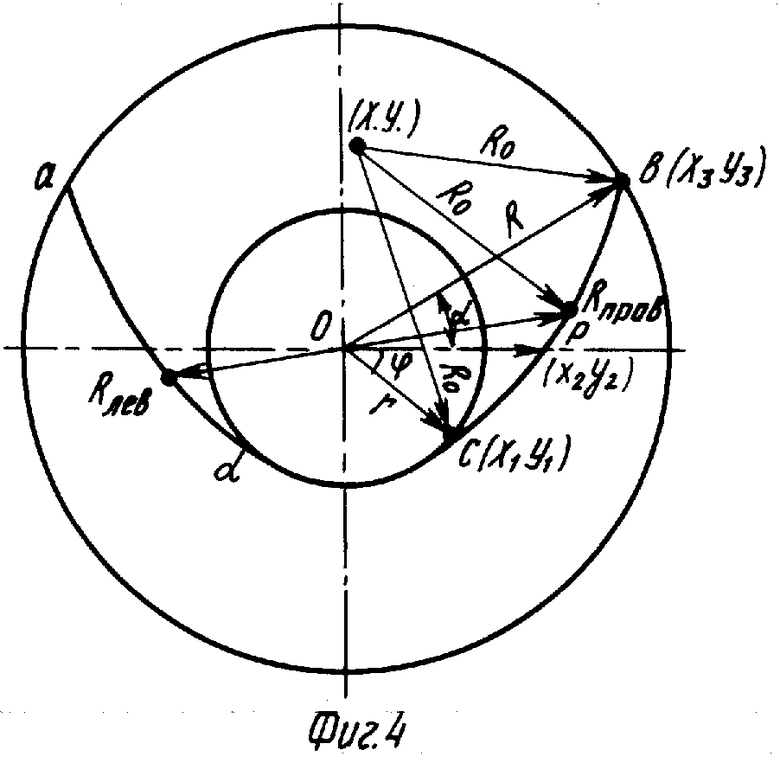
Докажем, что спираль Архимеда с высокой степенью точности можно заменить дугой, окружности, проведенной через три точки: концы переходной кривой (точки с и b фиг. 4), и ее середину - точку Р.
Координаты центра окружности Хo и Yo и ее радиус Ro определяют соотношениями:


Принимая во внимание, что
X1 = r, X2 = X2=  Cosα cos α , X3 = R cos 2 α
Cosα cos α , X3 = R cos 2 α
Y1 = 0, Y2 = Y2=  Sinα sin α , Y3 = R sin 2 α
Sinα sin α , Y3 = R sin 2 α
и обозначив (R + r)/2 = l, находим радиус и координаты центра вращения образующей: Ro2 = l2 - 2l (Xo cos α + Yo sin α) + Xo2 + Yo2 X0= - 
 Y0=
Y0= 

Погрешность аппроксимации спирали Архимеда окружностью, проходящей через две крайние и среднюю точки переходного участка, определяется как разность длин радиус-векторов, проведенных из центра статора до точек пересечения с окружностью и спиралью:
ε= ρo-ρ. Суммарный зазор δ между концами шибера и переходной поверхностью определяется как алгебраическая сумма погрешностей аппроксимации для углов ϕ и 2α-ϕ .
Для спирали Архимеда:
ρ = r +  .
.
Для окружности:
ρ
ρ
ρ0= (X0Cosϕ+Y0Sinϕ)+ ,
,
δ = εлев + εправ = ρ0(ϕ-r-  ϕ+ρ0(2α-ϕ)-r-
ϕ+ρ0(2α-ϕ)-r- (2α-ϕ),
(2α-ϕ),
 +. Был проведен численный анализ выражения (3) при различных углах α и соотношениях радиусов ротора и статора r/R при R = 100 мм. Анализ показывает, что максимальная погрешность аппроксимации соответствует точкам ϕ = α /2 и ϕ = 3/2 α (точки М и N на фиг. 5). Во всех рассмотренных случаях максимальная погрешность δ /R не превышает 2,7 . 10-3. Значения максимальных погрешностей приведены в таблице.
+. Был проведен численный анализ выражения (3) при различных углах α и соотношениях радиусов ротора и статора r/R при R = 100 мм. Анализ показывает, что максимальная погрешность аппроксимации соответствует точкам ϕ = α /2 и ϕ = 3/2 α (точки М и N на фиг. 5). Во всех рассмотренных случаях максимальная погрешность δ /R не превышает 2,7 . 10-3. Значения максимальных погрешностей приведены в таблице.
Таким образом, переходный участок вкладыша можно выполнить в виде дуги окружности с относительной погрешностью порядка 2,7 . 10-3.
По сравнению с прототипом предложенное решение позволяет заменить обработку внутренней поверхности статора сложной формы на обработку внешней цилиндрической поверхности вкладыша с последующей установкой вкладыша в полости статора. Эти операции не вызывают технологических трудностей.
Это показывает, что цель изобретения - упрощение изготовления роторной машины - достигнута.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНАЯ ОБЪЕМНАЯ ГИДРОПНЕВМОМАШИНА | 1995 |
|
RU2082020C1 |
| РОТОРНО-ПЛАСТИНЧАТЫЙ ДВИГАТЕЛЬ | 2016 |
|
RU2630643C1 |
| ОБЪЁМНЫЙ РОЛИКОВЫЙ НАСОС | 2016 |
|
RU2627488C1 |
| РОТОРНО-ПЛАСТИНЧАТЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1990 |
|
RU2013593C1 |
| РОТОРНО-ПЛАСТИНЧАТАЯ МАШИНА | 2005 |
|
RU2283961C1 |
| ГАЗОВАЯ МАШИНА | 1988 |
|
RU2054566C1 |
| РОТОРНЫЙ АППАРАТ ГИДРОУДАРНОГО ДЕЙСТВИЯ "САМПО" | 1992 |
|
RU2019281C1 |
| СПОСОБ ПОСТРОЕНИЯ НАПРАВЛЯЮЩЕЙ КРИВОЙ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ РОТОРА ИЛИ КОРПУСА (ВАРИАНТЫ) | 1999 |
|
RU2163977C2 |
| РОТОРНАЯ МАШИНА | 1993 |
|
RU2116514C1 |
| МЕХАНИЗМ УРАВНОВЕШИВАНИЯ ПОРШНЕВОЙ МАШИНЫ | 1990 |
|
RU2011061C1 |


Сущность изобретения: роторная машина содержит статор, внутренняя поверхность которого образована цилиндрической поверхностью с большим радиусом, фигурной поверхностью, включающей цилиндрическую поверхность с малым радиусом, и двумя переходными участками между ними, в зоне которых расположены впускное и выпускное отверстия для рабочего тела, соосный со статором ротор с пазом и шибером. Шибер имеет длину, равную длине рабочей камеры статора, ширину, равную сумме большого и малого радиусов цилиндрических поверхностей, и установлены в пазу ротора с возможностью перемещения, а паз проходит через ось вращения ротора. Статор выполнен в виде втулки с внутренним диаметром, равным удвоенному радиусу, с жестко установленным в ней серповидным вкладышем, внешняя поверхность которого выполнена цилиндрической с радиусом, равным большому радиусу, а радиус внутненней поверхности равен малому радиусу. 5 ил. , 1 табл.
РОТОРНАЯ МАШИНА, содержащая статор, внутренняя поверхность которого образована цилиндрической поверхностью с большим радиусом R и фигурной поверхностью, включающей цилиндрическую поверхность с малым радиусом r<<R, и двумя переходными участками между ними, в зоне которых расположены впускное и выпускное отверстия для рабочего тела, соосный со статором ротор с пазом и шибером, причем шибер имеет длину, равную длине рабочей камеры статора, ширину, равную сумме большого и малого радиусов цилиндрических поверхностей, и установлен в пазу ротора с возможностью перемещения, а паз проходит через ось вращения ротора, при этом статор выполнен в виде втулки с внутренним диаметром, равным 2R, с жестко установленным в ней серповидным вкладышем, внешняя поверхность которого выполнена цилиндрической с радиусом, равным R, а радиус его внутренней поверхности равен r, отличающийся тем, что, с целью упрощения изготовления, переходные участки имеют радиус R0, определяемый по формуле
Ro=  ,
,
где L = (R + r)/2;
X0 и Y0 - координаты центра вращения образующей цилиндрической поверхности;
α - половина углового расстояния между линиями, проходящими через концы каждого переходного участка.
