Изобретение относится к мощным импульсным системам питания электромагнитов, в частности к кольцевым ускорителям заряженных частиц и к установкам типа ТОКОМАК.
Известные устройства и системы импульсного электропитания электромагнитов основаны либо на подключении всей обмотки электромагнита к импульсному источнику тока, либо на последовательном включении импульсных источников тока между секциями обмоток электромагнита (эта структура известна под названием "Хоровод"). Во всех системах по структуре "Хоровод" источники тока создают гальваническую связь между всеми секциями электромагнита. За рубежом по структуре "Хоровод" выполнены электромагниты кольцевых ускорителей, а в СССР по этой структуре выполнен проект строящегося в Протвино Ускорительно-накопительного комплекса (УНК), сведения о котором сообщаются в Трудах 4-10 Всесоюзного совещания по ускорителям заряженных частиц М. , Дубна, 1975-1987 г. г.
В качестве прототипа принимаем систему электропитания кольцевого электромагнита по структуре "Хоровод", которая содержит N источников тока, равномерно распределенных по кольцу между секциями электромагнита. Обычно стабилизирующий источник тока выполнен на управляемом выпрямителе, а остальные источники тока - неуправляемые, но содержат активные и пассивные фильтры, причем первые управляются от выходных шин для уменьшения пульсации тока. В процессе управления током электромагнита неуправляемые источники тока запираются и шунтируются ключами.
Основные недостатки прототипа: высокое напряжение в кольце электромагнита, которое требует соответствующего усиления изоляции как обмотки электромагнита, так и источников тока; большие потери энергии в электромагните и источниках тока; пассивные и активные источники энергии в замкнутом кольце являются источниками опасных перенапряжений; случайное заземление или пробой любого элемента в кольце создает аварийную ситуацию для секций электромагнита и источников тока; большое количество ключей в системе для обеспечения ее функционирования; система замыкания и размыкания источников тока тиристорными ключами создает предпосылки к аварийным ситуациям; множество факторов и возмущений, которые не выбираются предусмотренной системой стабилизации тока, в частности: неконтролируемые связи между источниками тока, утечки тока по кольцу, волновые процессы.
Сложность системы в целом затрудняет ее эксплуатацию, в частности поиск неисправностей в ней.
Большое количество указанных недостатков снижает устойчивость системы электропитания, а множество факторов, приводящих к аварийному состоянию кольца, снижает надежность всей системы электропитания электромагнита.
Целью изобретения является повышение КПД, качества магнитного поля и надежности в эксплуатации.
Цель достигается тем, что каждая секция электромагнита подключена к своему автономному источнику тока, выполненному на основе эффектов бесконечного усиления, при этом управляющий вход каждого источника тока подключен к одному управляющему (задающему) устройству.
Каждый источник тока выполнен в виде автоматической системы на управляемом выпрямителе с введенным в схему быстродействующим регулятором (БДР). Управляющие входы управляемого выпрямителя (УВ) и силовой части БДР через согласующе-усилительные каскады подключены к выходам блока главного усилителя (БГУ) на q(q ≥ 2) последовательно включенных усилительных каскадах на эффекте бесконечного усиления. Входы БГУ подключены к выходным координатам автоматической системы.
БГУ может быть выполнен как на q(q ≥ 2) последовательно включенных операционных усилителях без обратных связей, так и на q(q ≥ 2) дифференциальных усилителях, а также на сочетании их.
Шины питания БГУ запитаны от стабилизатора напряжения на эффектах бесконечного усиления.
Указанные отличительные признаки обуславливают новизну предложения. Эти отличительные признаки являются существенными, именно они обеспечивают создание положительного эффекта, отраженного в цели изобретения, и отсутствуют в известных технических решениях.
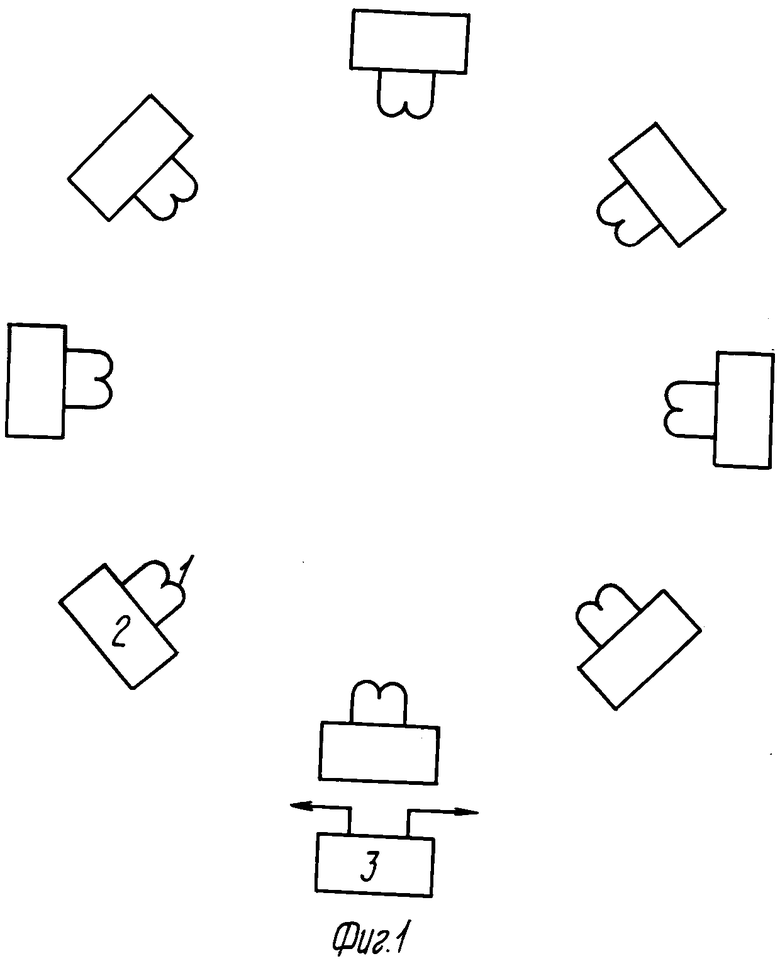
Схема системы импульсного питания электромагнита показана на фиг. 1, где 1 - секции электромагнита, 2 - источники тока, 3 - задающее (управляющее) устройство.
Из схемы фиг. 1 видно, что обмотка электромагнита разбита на отдельные секции, каждая из которых запитана от автономного полностью управляемого источника 2 тока. Выходные координаты каждого из источников тока управляются от одного задающего (управляющего) устройства 3. Число секций N электромагнита определяется в основном исходя из физических соображений, прочности изоляции обмотки диполя электромагнита, скорости нарастания тока в обмотке электромагнита, общего КПД, освоенных в промышленности преобразовательных устройств, стоимости оборудования и строительно-монтажных работ.
При цикличной работе системы фиг. 1 энергия, поглощающая секциями электромагнита и источниками тока, расходуется на компенсацию всех тепловых потерь Wп в них. Будем исходить из трапецеидальной формы тока в секциях электромагнита, временная характеристика которого определяется временем нарастания тока Т1; длительностью стола Т2; спада тока Т3; паузы Т4.
Полная энергия потерь в целом равна
Wп = rI 1+
1+  , (1)
, (1)
Tn = Т1 + Т3, где r - полное сопротивление потерь (сопротивление всех секций электромагнита, шинопровода, внутреннего сопротивления источников тока);
Ic - ток в секциях электромагнита в режиме стола.
Средняя мощность всей системы импульсного электропитания равна
Pп = 
 1+
1+ 
 . (2) Из (1) и (2) видно, что с уменьшением Тп, т. е. с увеличением скорости ввода и вывода тока в электромагните, уменьшаются как потери энергии в системе фиг. 1, так и средняя мощность системы электропитания, однако это ведет к увеличению напряжения в кольце электромагнита, что недопустимо в структуре типа "Хоровод", но вполне допустимо и нормально для системы фиг. 1. Чем больше N, тем эффективнее и полнее осуществляется коррекция магнитного поля электромагнита самой системой фиг. 1, что невозможно сделать в структуре типа "Хоровод".
. (2) Из (1) и (2) видно, что с уменьшением Тп, т. е. с увеличением скорости ввода и вывода тока в электромагните, уменьшаются как потери энергии в системе фиг. 1, так и средняя мощность системы электропитания, однако это ведет к увеличению напряжения в кольце электромагнита, что недопустимо в структуре типа "Хоровод", но вполне допустимо и нормально для системы фиг. 1. Чем больше N, тем эффективнее и полнее осуществляется коррекция магнитного поля электромагнита самой системой фиг. 1, что невозможно сделать в структуре типа "Хоровод".
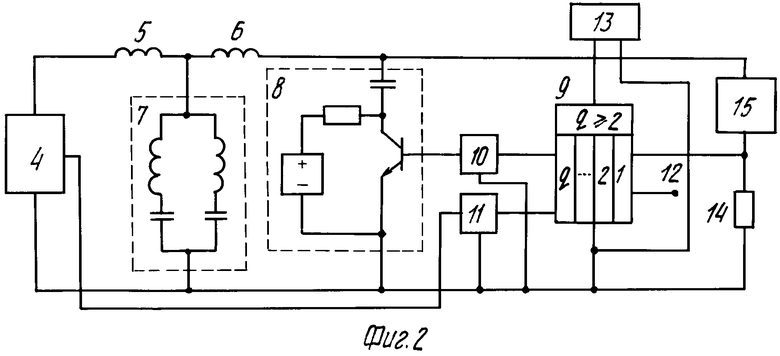
Предложенная автономно-секционированная система импульсного питания электромагнита, т. е. структура на схеме фиг. 1, основана на точных полностью управляемых источниках тока с самым прогрессивным в настоящее время силовым регулирующим органом - управляемом выпрямителе (УВ). На фиг. 2 показана блок-схема системы управления электрической величиной, используемой в схеме фиг. 1 в качестве источника тока, где 4 - управляемый выпрямитель (УВ), 5,6 - дроссели, 7 - блок резонансных звеньев, настроенных на основную гармонику УВ и при необходимости на последующие гармоники, 8 - активный быстродействующий элемент силовой части БДР, 9 - блок главного усилителя (БГУ), выполненный на q (q ≥ 2) последовательно включенных усилительных каскадах, каждый из которых на основе эффекта бесконечного усиления. БГУ может быть также выполнен на q (q ≥ 2) последовательно включенных без обратных связей операционных или дифференциальных усилителях, 10,11 - согласуще-усилительные каскады, 12 - входная клемма БГУ, 13 - стабилизатор постоянного напряжения на эффектах бесконечного усиления, 14 - датчик тока (или магнитного поля), 15 - объект (нагрузка).
В выходную шину управляемого выпрямителя 4 включены дроссели 5,6, а между общей точкой дросселей и общей шиной системы включен блок 7 резонансных звеньев. К выходным шинам системы подключены силовые выводы активного быстродействующего элемента. Элементы схемы 5,6,8 образуют силовую часть БДР. Активный быстродействующий элемент 8 содержит подключенные к выходным шинам последовательно включенные конденсатор и транзистор (или группу транзисторов), при этом общая точка конденсатора и коллектора транзистора через резистор подключена к одному выводу нестабилизированного выпрямителя небольшой мощности, а другой вывод - к общей шине системы. БГУ 9 входами подключен к выходным координатам системы, выходами через согласующе-усилительные каскады 10,11 соединен с управляющими входами УВ и БДР. БГУ, снабженный клеммой 12 для управления, запитан от стабилизатора 13 напряжения.
Система работает на принципе регулирования по отклонению, она обеспечивает точное управление выходными координатами от нуля и в противоположной знаковой области, при этом полностью подавляет все действующие на нее возмущения, включая и параметрические. Если выключить БДР, то система будет неработоспособной, а если выключить все каналы положительной обратной связи в БГУ, создающие эффект бесконечного усиления, то система потеряет свои идеальные свойства.
Технико-экономический эффект состоит в том, что предложенная система импульсного питания электромагнита устраняет недостатки прототипа и обеспечивает более высокий КПД, более высокое качество магнитного поля и большую надежность в эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНО-СЕКЦИОНИРОВАННАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОЛЬЦЕВОГО ЭЛЕКТРОМАГНИТА | 1999 |
|
RU2164059C2 |
| Система стабилизации электрической величины (ее варианты) | 1980 |
|
SU1205133A2 |
| Система управления электрической величиной | 1981 |
|
SU1422221A1 |
| Система стабилизации электрическойВЕличиНы | 1976 |
|
SU813383A1 |
| Система стабилизации электрической величины | 1980 |
|
SU1403033A2 |
| Стабилизатор электрической величины | 1985 |
|
SU1332287A1 |
| Компенсационный стабилизатор постоянного напряжения | 1980 |
|
SU1394207A1 |
| Система стабилизации электрической величины | 1975 |
|
SU731426A1 |
| СПОСОБ УСКОРЕНИЯ ЗАРЯЖЕННЫХ ЧАСТИЦ | 1999 |
|
RU2166844C1 |
| СПОСОБ УСКОРЕНИЯ ЗАРЯЖЕННЫХ ЧАСТИЦ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2000 |
|
RU2169444C1 |
Использование: относится к мощным импульсным системам питания электромагнитов. Сущность изобретения: автономно-секционированная система импульсного питания электромагнита состоит из независимых секций электромагнита, каждая из которых подключена к автономному полностью управляемому источнику тока на основе эффектов бесконечного усиления. Эта структура система позволяет увеличить скорость ввода и вывода тока в электромагните, что обеспечивает повышение КПД, повышает качеству магнитного поля и надежность в эксплуатации. 3 з. п. ф-лы, 2 ил.
