стродействующего регулятора состоит из последовательно соединенных активного элемента, резистора и второго нестабилизированного выпрямителя С полярностью включения, противо1
Изобретение относится к системам
Iавтоматического управления, в частности к мощным высоковольтным и низковольтным источникам питания высокой точности с большим кпд, и является усовершенствованием известного устройства по авт.св. № 731426
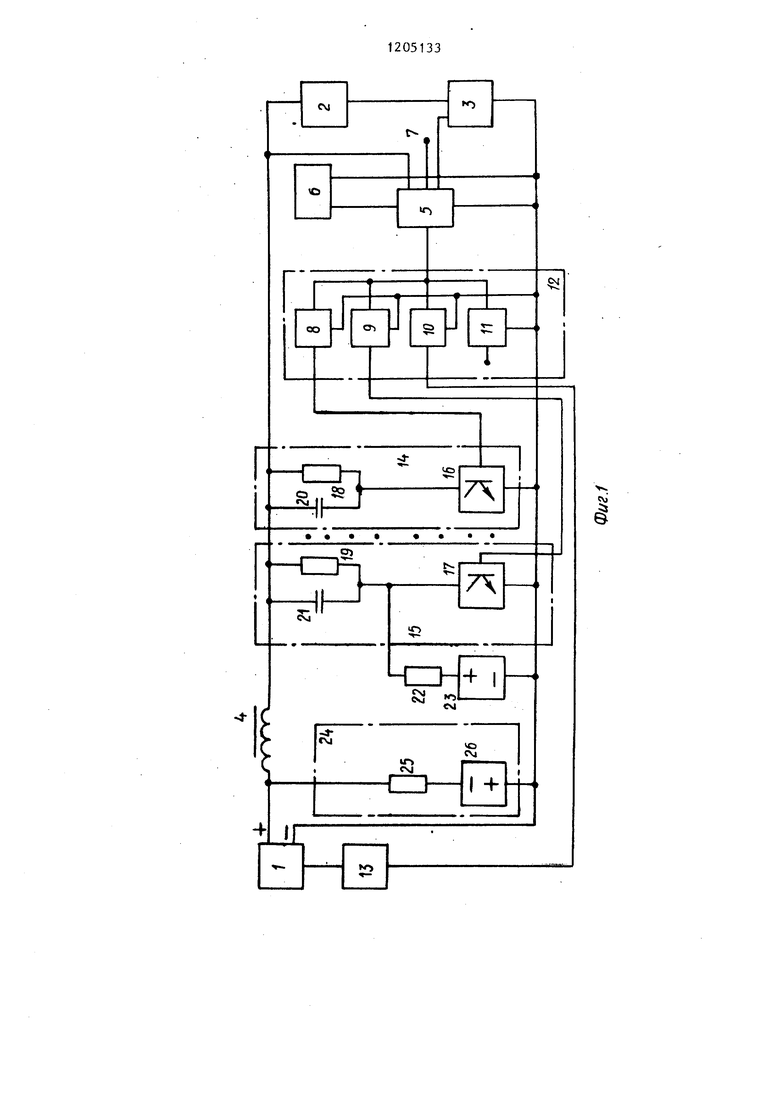
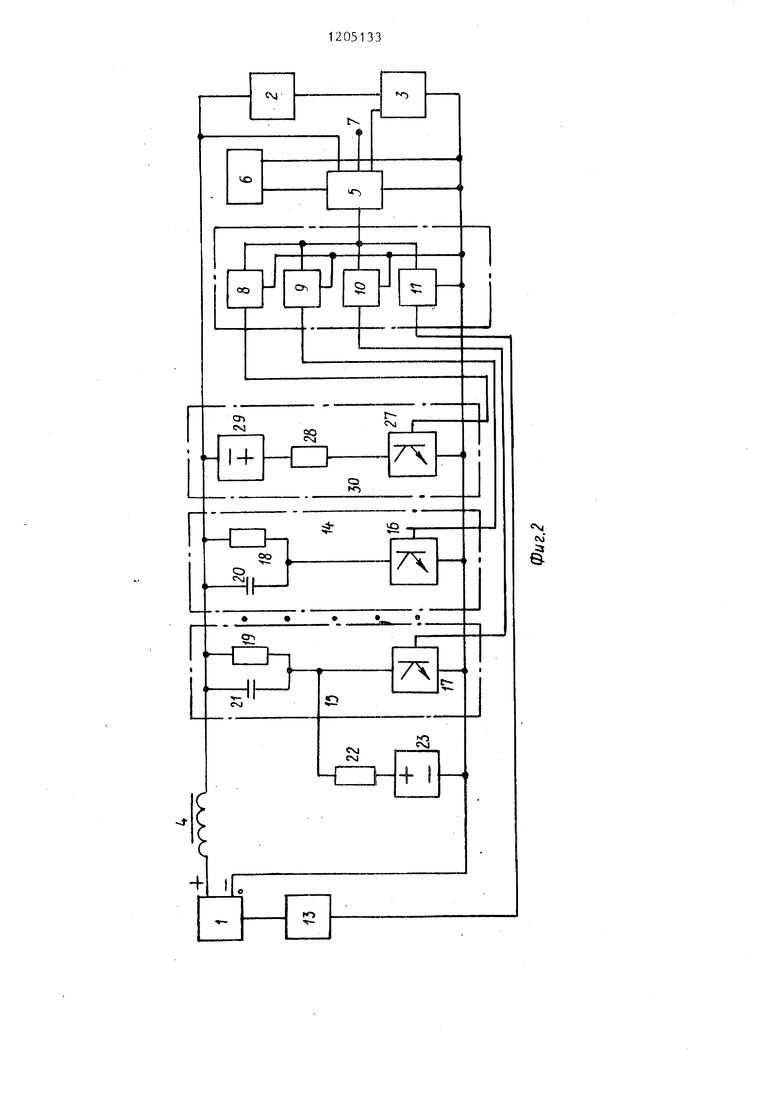
На фиг.1 изображена схема системы, первый вариант} на фиг.2 - то же, второй вариант.
Система содержит основной регулирующий орган (управляемый выпрямитель, широтно-импульсны или ключевой преобразователь, генератор постоянного тока, управляемый дроссель с выпрямителем) 1, объект (нагрузку) 2, датчик 3 тока, дроссель 4, сравнивающе-усилительный узел 5 на основе эффекта бесконечного усиления (ЭБУ), стабилизатор 6 напряжения на основе эффекта бесконечного усиления (ЭБУ), входную клемму 7, согласующе-усилительные каскады 8-11, блок 12 согласования и усиления, блок 13 управления регулирующим органом, первую 14 и вторую 15 секции активного элемента быстродействующего регулятора (ВДР), транзисторы (электронные лампы) 16 и 17 резисторы 18 и 19, конденсаторы 20 и 21, резистор 22, нестабилизиро- ванный выпрямитель 23 небольщой мощности, канал 24 компенсации, резистор 25 и нестабилизированный выпря-. митель 26 небольшой мощности.
Блок 13 управления соответствует основному регулирующему органу: если регулирующий орган 1 - управляемый выпрямитель, то блок 13 управления является схемой импульсно-фазо вого управления(СИФУ), если регулирующий орган 1 - широтно-импульсный или ключевой преобразователь, то блок 13 управления является модулятором J если регулирующий орган 1 - генератор постоянного тока, то блок
положной основному регулирующему органу, а усилитель сравнивающе-усилительного узла выполнен на основе усилителя с эффектом бесконечного
усиления.
13 управления - усилитель мощности на основе эффекта бесконечного усиления. Дроссель 4 выполнен как на осноэе сердечника, так и без него. Стабилизатор 6 напряжения на основе ЭБУ используется в схеме системы для питания каскадов в сравнивающе-усилительном узле 5J для задания уставки от резистора задания, находящегося внутри сравнивающе-усилительного узла 5.
Кроме того, сравнивающе-усилительный узел 5 снабжен клеммой 7 - входом задания уставки выходной координаты системы от внешнего источника напряжения. В выходную шину системы между выходом основного регулирующего органа 1 и объектом 2 с последовательно- включенным датчиком 3 тока включен дроссель 4. К выходным шинам системы подключены входы сравнивающе-усилительного узла 5 , к шинам питания которого подключен стабилизатор 6 напряжения на
основе ЭБУ, Сравнивающе-усилительный узел имеет входную клемму 7 для осуществления задания уставки выходных координат системы от внешнего источника сигнала. Выход сравнивающе-усилительного узла через согласующе-усилительные каскады 8-11 блока 12 согласования и усиления соединен .с блоком 13 управления основного регулирующего органа и управляющими входами секций 14 и 15 активных элементов быстродействующего регулятора, которые содержат транзисторы 16 и 17, последовательно с которыми вклю чены параллельно соединенные соответственно резисторы 18 и 19 и конденсаторы 20 и 21, при этом параллельно транзистору второй секции активного элемента включены последовательно включенные резистор 22 и нестабилизированный выпрямитель 23. Параллельно выходу основного регули
3
рующего органа включен канал 24 компенсации в виде последовательно соединенных резистора 25 и нестабилизированного выпрямителя 26 обратной полярности. При смене полярное- ти выходного напряжения основного регулирующего органа 1 соответственно изменяется на противоположные полярность нестабилизированных выпрямителей 23 и 26 и тип проводимости транзисторов 16 и 17, Тип блока 13 управления соответствует по конструкции установленному в систему регулирующему органу 1. Секции активных элементов могут содержать как парал- лельно соединенные подобные секции, так и параллельно соединенные транзисторы, число которых определяется общим током быстродействующего регулятора (БДР). На фиг.1 система изоб- ражена в состоянии для выходной координаты ток объекта , при переходе к координате напряжение на объекте схема системы упрощается: датчик тока исключается или отключает- ся соответствующий вход от датчика 3 тока.В конкретных условиях применения системы конденсаторы 20 и 21 могут полностью или частично исключаться из схемы.Сравнивающе-усили- тельный узел 5 выполнен на основе одноканальной или многоканальной положительной обратной связи (ПОС), которые создают эффект бесконечного усиления. Дроссель 4 и секции 14 и 1 в указанном (фиг.1) соединении по силовым цепям и цепям управления соотносительно этих же цепей образуют быстродействующий регулятор (БДР). Система (фиг.1) работает на гфин- ципе регулирования по отклонению, и поэтому она в равной мере полность подавляет все возмущения на фиксированной уставке выходной координаты в ограниченном диапазоне возмужающих воздействий, что достигается в результате совместной работы основного регулирующего органа, быстродей- ствукядего регулятора и сравнивающе-усилительного узла на основе ЭБУ. Если выключить из схемы только БДР, то система неработоспособна, а если выключить только каналы ПОС в сравнивающе-усилительном узле 5, то она теряет показанное качество. БДР работает только в динамике. Первая секция 14 активного элемента БДР работает в системе до определенного минимального напряжения на выходных
5 0 5 о
0
5
334
шинах, при этом уменьшается протекающий через нее ток. В отличие от первой вторая секция (и дополнительно включенные подобные ей) 15 БДР работает при любом напряжении на выходных шинах (поскольку они подключены к источнику 23 питания), а также в противоположной полярности их. Канал 24 компенсации осуществляет нейтрализацию напряжения на объекте, создаваемого нестабилизированным выпрямителем 23, и создает необходимый ток смещения в основном регулирующем органе 1, что обеспечивает работоспособность его при нулевых и противоположных значениях выходных координат системы. К выпрямителям 23 и 26 не предъявляется требования к качеству их напряжения, так как их нестабильность подавляется сравнивающе-усилительным узлом 5 с помощью основного регулирующего органа 1 и БДР. Вторая секция 15, подключенная к источнику питания, обеспечивает повьше- ние быстродействия системы в начальной области выходных координат системы. С увеличением напряжения на объекте первая секция 14 БДР принимает на себя больший ток. С помощью согласующе-Усилительных каскадов 8 и 9 можно переводить ток БДР с секции 14 на секцию 15 и наоборот путем изменения коэффициентов передачи согласующе-усилитель- ных каскадов. По энергетическим соображениям, например, секцию 15, или подобную ей, совместно со своим согласующе-усилительным каскадом, можно сделать более мощной и в определенной степени инерционной, а секцию 14 - безынерционной, при этом они совместно с основным регулирующим органом 1 выступают как единое и безынерционное звено, т.е. при определенных параметрах 14 и 15 быстродействующий регулятор и основной регулирующий орган 1 воспринимаются объектом и системой в целом как единое безынерционное и полностью управляемое линейное звено, при этом неточная частотная компенсация вследствие нелинейности основного регулирующего органа 1 не имеет существенного значения, так как сравнивающе-усилительный узел на основе ЭБУ полностью компенсирует неточность частотной компенсации БДР и основного регулирующего
органа 1 в пределах линейного участка амплитудной характеристики входного каскада на основе ЭБУ в сравнивающе-усилительном узле 5. Из всех указанных видов регулирующего органа наиболее прогрессивным является управляемый выпрямитель, который обладает существенными недостатками, ограничивающими его применение (неполная управляемость, дискретность, нелинейность). В системе (фиг.1) БДР .под идеальным руководством сравнивающе-усилительного узла 5 полностью устраняет указанные недостатки основного регулирующего органа 1, при этом обеспе 1Швается полная управляемость системы, начиная от нуля ее выходных координат. Уставка выходных координат может быть -установлена как с помощью сравнивающе-усилительного узла 5 за счет изменения сопротивления его задающего резистора, так и с помощью внешнего источника напряжения , которое может быть подано на вход 7 задания уставки.
В системе с вьщеленньм каналом компенсации (фиг.1) выпрямитель 26 неполно используется. Кроме этого, .система может работать без явно выраженного дросселя 4, когда канал компенсации не удается реализовать без увеличения тока БДР.
На схеме (фиг.2) изображен второ вариант системы без явно выраженног канала компенсации, где 27 - транзистор (электронная лампа), 28 - резистор, 29 - нестабилизированный выпрямитель небольшой мощности.
Последовательно соединенные транзистор 27, резистор 28 и нестабилизированный выпрямитель 29 включены па- раллельно выходным шинам системы, т.е. параллельно секциям 14 и 15 активного элемента БДР, Элементы 27-29 совместно образуют секцию активного элемента 30 БДР.
Оба варианта системы работают аналогично, но отличие второго варианта состоит в том, что секция активного элемента 30 помимо функции, выполняемой секциями 14 и 15, дополнительно выполняет функцию канала 24
компенсации в схеме первого варианта. Ток компенсации устанавливается за счет выбора рабочей точки покоя транзистора 27, стабильность которой не имеет значения, так как ее нестабильность полностью компенсируется сравнивающе-усилительным узлом 5. Во втором варианте нестабилизированный вьшрямитель 23 может быть
исключен из схемы, т.е. работоспособность системы может быть обеспечена без выпрямителя 23 во всем диапазоне выходных координат системы не только в окрестности их нуля, но
и при отрицательном значении выходных координат, как это имеет место и в первом варианте системы, т.е. фиг.2 эквивалента фиг.1.
Технико-экономический эффект
предлагаемой системы состоит в том, что создана система стабилизации электрической величины при любой уставке ее выходных координат, начиная от нуля, при этом повышено ее быстродействие.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система стабилизации электрической величины | 1980 |
|
SU1403033A2 |
| СИСТЕМА ИМПУЛЬСНОГО ПИТАНИЯ ЭЛЕКТРОМАГНИТА | 1988 |
|
RU2013893C1 |
| Система стабилизации электрическойВЕличиНы | 1976 |
|
SU813383A1 |
| Система управления электрической величиной | 1981 |
|
SU1422221A1 |
| Стабилизатор электрической величины | 1985 |
|
SU1332287A1 |
| Система стабилизации электрической величины | 1975 |
|
SU731426A1 |
| АВТОНОМНО-СЕКЦИОНИРОВАННАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОЛЬЦЕВОГО ЭЛЕКТРОМАГНИТА | 1999 |
|
RU2164059C2 |
| БОРТОВОЙ СИГНАЛИЗАТОР ТОКА УТЕЧКИ ТРОЛЛЕЙБУСА | 1996 |
|
RU2099207C1 |
| Компенсационный стабилизатор постоянного напряжения | 1980 |
|
SU1394207A1 |
| Программируемый стабилизатор напряжения постоянного тока с изменяющейся полярностью | 1981 |
|
SU1013929A1 |
1. Система стабилизации электрической величины по авт.св. № 731426, отличающаяся тем, что, с целью обеспечения регулировки вькодной электрической величины от нуля с заходом в область противоположного знака, повышения быстродействия и точности выходной электрической величины, в нее введены (т-1) дополнительных секций активного элемента быстродействующего регулятора, подключенных параллельно первой секции активного элемента быстродействующего регулятора, (т-1) дополнительных согла- сующе-усилительных каскадов, входами подключенных к входу первого согласутоще-усилительного каскада, а выходами соединенных с управляющими входами соответствующих секций быстродействующего регулятора, цепь подпитки, состоящая из последовательно соединенных первого нестабилизированного выпрямителя с полярностью включения той же, что и основного регулирующего органа, и резистора, подключенная параллельно к силовым выводам активного элемента секции быстродействующего регулятора, и цепь компенсации, состоящая из последовательно соединенных второго нестабилизированного выпрямителя с полярностью включения, противоположной основному регулирующему органу, и резистора, подключенная параллельно основному регулирующему органу, кроме того, в сравнивающе-усилительном узле усилитель выполнен на основе усилителя с эффектом бесконечного усиления. 2. Система стабилизации электрической величины по авт.св. № 731426, от личающаяся тем, что, с целью обеспечения регулировки выходной электрической величины от нуля с заходом в область противоположного знака, повьшения быстродействия и точности выходной электрической величины, в нее введены m дополнительных секций активного элемента быстродействующего регулятора, подключенных параллельно первой секции активного элемента быстродействующего регулятора. Ил дополнительных согласующе- усилительных каскадов, входами подключенных к входу первого согласую- ще-усилительного каскада, а выходами соединенных с управляющими входами соответствующих секций быстродействующего регулятора, цепь подпитки, состоящая из последователь- нб соединенных первого нестабилизированного вьшрямителя с полярностью включения той же, что и у основного регулирующего органа, и резистора, подключенная параллельно к силовым вьшодам активного элемента быстродействующего регулятора, причем одна из дополнительных секций быi (Л С ND О сл со со
„ J о, J Ci -I
«N
«Vl
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система стабилизации электрической величины | 1975 |
|
SU731426A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
