Изобретение относится к технике для земляных и открытых горных работ.
Известно навесное оборудование для рыхления прочных грунтов, смонтированное на базовой машине со стрелой. Это оборудование включает направляющую штангу, шарнирно соединенную со стрелой базовой машины, и взаимодействующий с направляющей штангой клин-рыхлитель. Нижний конец направляющей штанги снабжен фиксаторно-прижимной головкой, которая установлена с возможностью ограниченного перемещения в осевом направлении внутри замкнутой полости. Последняя выполнена в корпусе клина-рыхлителя. На направляющей штанге над клином-рыхлителем смонтирован свободно падающий боек. Корпус клина-рыхлителя имеет вертикальный вырез, верхняя часть которого выполнена в виде сквозного паза в боковой стенке замкнутой полости, а нижняя - в виде прорези в клиновой части корпуса. При этом клин-рыхлитель снабжен шарнирно установленным в вырезе корпуса подпружиненным двуплечим рычагом, одно из плеч которого выполнено в виде скалывающего элемента, размещенного в прорези клиновой части корпуса, а другое расположено в сквозном пазу боковой стенки замкнутой полости с возможностью взаимодействия с фиксаторно-прижимной головкой направляющей штанги [1].
Недостатком этого оборудования является то, что рыхление прочных грунтов скалывающим элементом происходит только в одну сторону, что снижает производительность рыхления.
Цель изобретения состоит в повышении производительности рыхления.
Эта цель достигается тем, что в навесном оборудовании для рыхления прочных грунтов боек имеет в нижней части полость, в которой расположен с возможностью взаимодействия с размещенным в сквозном пазу боковой стенки замкнутой полости плечом двуплечего рычага подпружиненный ударный груз, и снабжен устройством регулирования высотного положения ударного груза. При этом устройство регулирования высотного положения ударного груза выполнено в виде винта, размещенного в бойке, ударный груз и устройство регулирования высотного положения ударного груза расположены соосно с направляющей штангой, а расстояние от ударного груза до двуплечего рычага соответствует величине 
 t1- где vб - скорость бойка в момент удара о клин-рыхлитель;
t1- где vб - скорость бойка в момент удара о клин-рыхлитель;
ω - собственная частота колебаний ударного груза;
t1 - время внедрения клина-рыхлителя после удара бойка;
mк, mб, mг - массы клина-рыхлителя, бойка и ударного груза;
F - сила сопротивления грунта внедpению клина-рыхлителя на требуемой глубине рыхления;
g - ускорение свободного падения;
с - жесткость пружины.
Введение в состав навесного оборудования подпружиненного ударного груза и устройства регулирования его высотного положения, а также выполнение расстояния от ударного груза до двуплечего рычага в соответствии с приведенной выше формулой позволяет получить новое свойство, заключающееся в возможности приложения к двуплечему рычагу комбинированного воздействия, состоящего из ударного воздействия со стороны ударного груза и статического воздействия со стороны фиксаторно-прижимной головки, что позволяет рыхлить прочный грунт двуплечим рычагом в двух направлениях, тем самым повышая производительность рыхления. Поэтому вводимые в состав навесного оборудования подпружиненный ударный груз и устройство регулирования высотного положения ударного груза, а также выполнение расстояния от ударного груза до двуплечего рычага в соответствии с приведенной выше формулой следует рассматривать как существенные отличительные признаки, обеспечивающие получение положительного эффекта, а данное решение соответствующим критерию "существенные отличия".
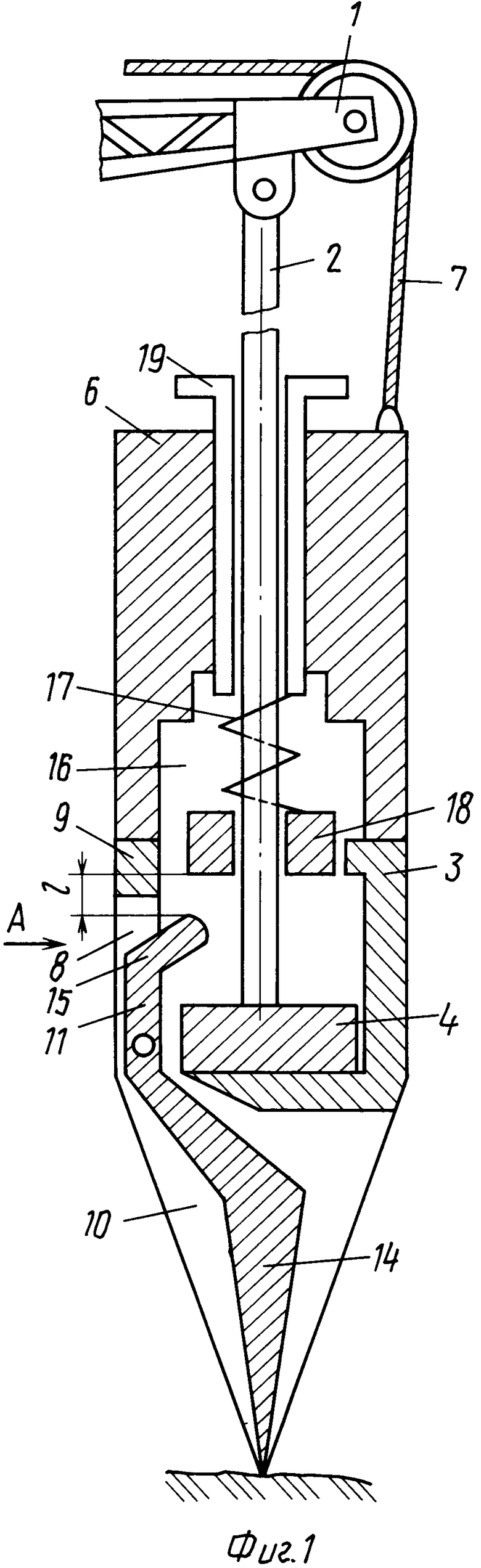
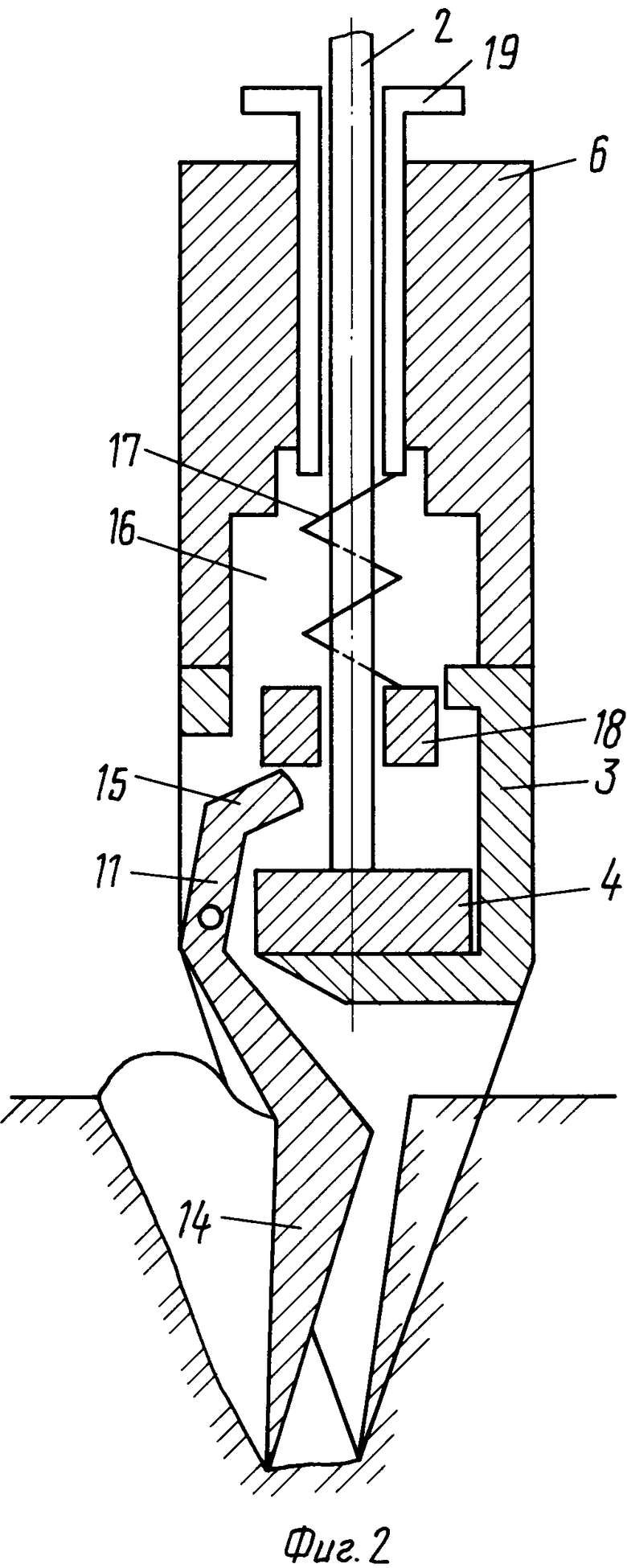
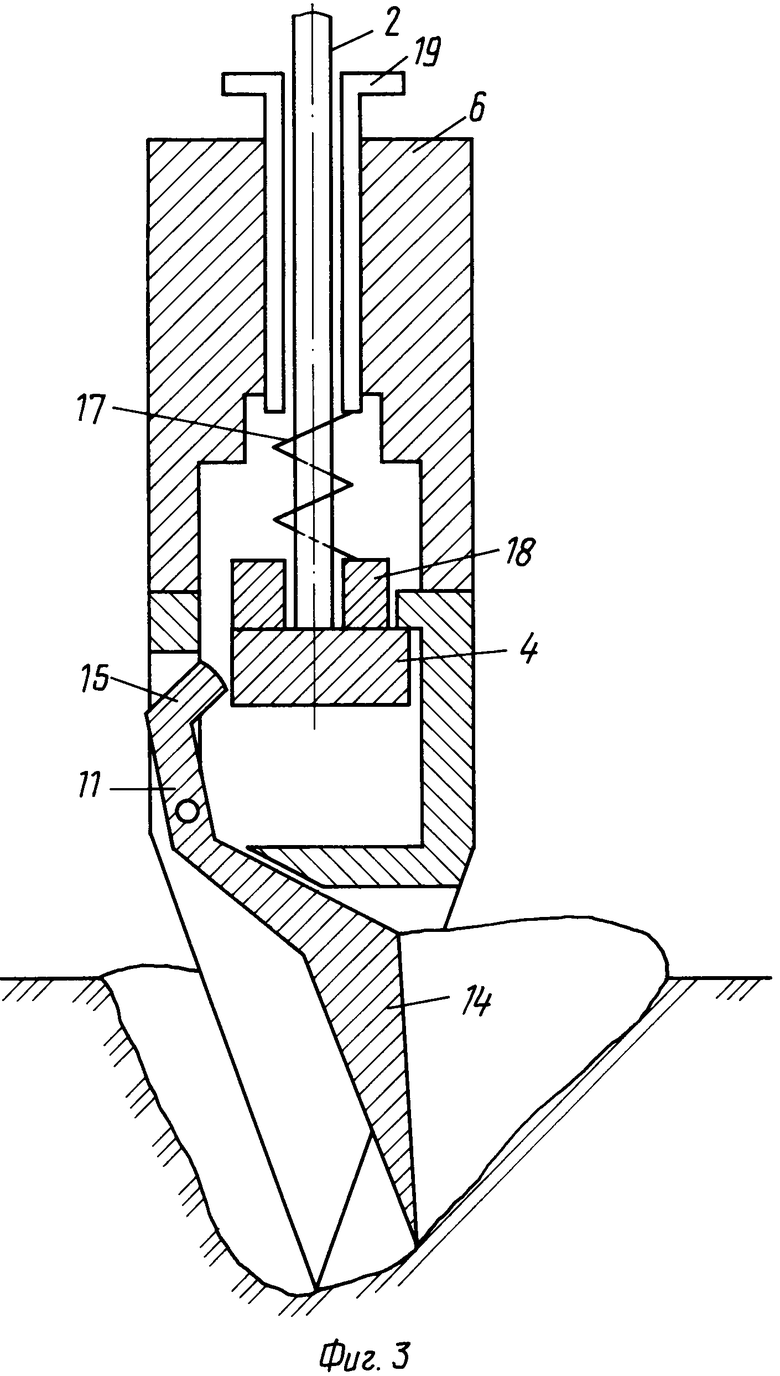
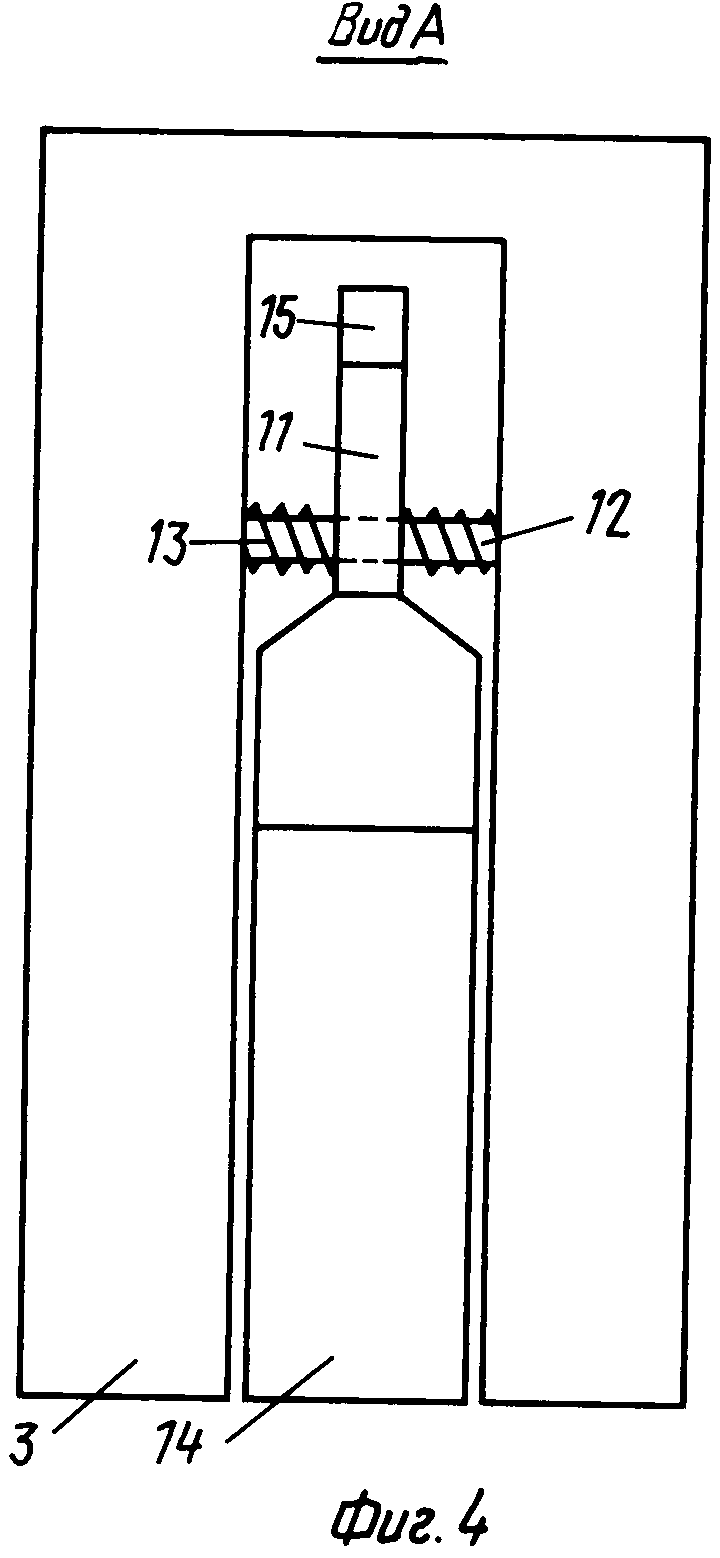
На фиг. 1 изображено навесное оборудование перед внедрением клина в грунт; на фиг. 2 - то же, при взаимодействии двуплечего рычага с ударным грузом; на фиг. 3 - то же, при взаимодействии двуплечего рычага с фиксаторно-прижимной головкой; на фиг.4 - вид по стрелке А на фиг.1.
Навесное оборудование для рыхления прочных грунтов монтируется на стреле 1 базовой машины и включает направляющую штангу 2, шарнирно соединенную со стрелой 1, и клин-рыхлитель 3. На нижнем конце направляющей штанги 2 имеется фиксаторно-прижимная головка 4, которая расположена в замкнутой полости 5 корпуса клина-рыхлителя 3. Над клином-рыхлителем 3 на направляющей штанге 2 смонтирован боек 6, соединенный с грузовым канатом 7. Корпус клина-рыхлителя 3 имеет вертикальный вырез, верхняя часть которого выполнена в виде сквозного паза 8 в боковой стенке 9 замкнутой полости 5, а нижняя - в виде прорези 10 в клиновой части клина-рыхлителя 3. В вырезе корпуса установлен двуплечий рычаг 11, который пружинами 12 и 13 кручения подпружинен относительно корпуса. Одно из плеч рычага 11 выполнено в виде скалывающего элемента 14, размещенного в прорези 10, а другое плечо 15 расположено в сквозном пазу 8.
Боек 6 имеет в нижней части полость 16, в которой расположен с возможностью взаимодействия с размещенным в сквозном пазу 8 боковой стенки 9 замкнутой полости 5 плечом 15 двуплечего рычага 11 подпружиненный пружиной 17 ударный груз 18. Боек 6 снабжен устройством регулирования высотного положения ударного груза, выполненным в виде винта 19, размещенного в бойке 6.
Устройство регулирования высотного положения ударного груза, кроме механического, может быть выполнено с гидравлическим или пневматическим приводом.
Ударный груз 18 и устройство регулирования высотного положения ударного груза расположены соосно с направляющей штангой 2.
Расстояние от ударного груза 18 до двуплечего рычага 11 соответствует величине
 t1-→ где vб - скорость бойка 6 в момент удара о клин-рыхлитель 3;
t1-→ где vб - скорость бойка 6 в момент удара о клин-рыхлитель 3;
ω - собственная частота колебаний ударного груза 18;
t1 - время внедрения клина-рыхлителя 3 после удара бойка 6;
mк, mб, mг - массы клина-рыхлителя 3, бойка 6 и ударного груза 18;
F - сила сопротивления грунта внедpению клина-рыхлителя 3 на требуемой глубине рыхления;
g - ускорение свободного падения;
с - жесткость пружины 17. Расстояние l от ударного груза 18 до двуплечего рычага 11 определяется следующим образом.
Дифференциальное уравнение движения ударного груза 18 имеет вид
m = -C(hу-hк)+mгg, где hу - перемещение ударного груза 18 относительно грунта;
= -C(hу-hк)+mгg, где hу - перемещение ударного груза 18 относительно грунта;
hк - внедрение клина-рыхлителя 3 в грунт.
После преобразований имеем +ω2hу=
+ω2hу=  Vct-
Vct-  +g, где ω =
+g, где ω =  ;
;
Vc=  - скорость системы боек-клин-рыхлитель после удара бойка 6 о клин-рыхлитель 3;
- скорость системы боек-клин-рыхлитель после удара бойка 6 о клин-рыхлитель 3;
Решение уравнения имеет вид
hу-  sinωt +
sinωt +  (1-cosωt) -
(1-cosωt) -  + Vct, где a =
+ Vct, где a =  - ускорение внедрения клина-рыхлителя 3 с бойком 6 в грунт. Перемещение ударного груза 18 относительно бойка 6 определяется по формуле
- ускорение внедрения клина-рыхлителя 3 с бойком 6 в грунт. Перемещение ударного груза 18 относительно бойка 6 определяется по формуле
hу-hк=  sinωt +
sinωt +  (1-cosωt), где hк= Vct -
(1-cosωt), где hк= Vct -  - внедрение клина-рыхлителя 3 в грунт.
- внедрение клина-рыхлителя 3 в грунт.
Время внедрения клина-рыхлителя 3 в грунт определяется по формуле
t1=  .
.
Тогда перемещение l1 ударного груза 18 относительно бойка 6 к моменту окончания внедрения клина-рыхлителя 3 в грунт будет равно
l1=  sinωt1+
sinωt1+  (1-cosωt1).
(1-cosωt1).
Скорость ударного груза 18 в момент окончания внедрения клина-рыхлителя 3 в грунт определяется по формуле
V = ( Vб-Vc)cosωt1+  sinωt1 На втором участке кинетическая энергия ударного груза 18 переходит в потенциальную энергию растянутой пружины 17.
sinωt1 На втором участке кинетическая энергия ударного груза 18 переходит в потенциальную энергию растянутой пружины 17.
Тогда справедливо выражение =
= 
 (l1+l2)l
(l1+l2)l , где l2 - перемещение ударного груза 18 на втором участке. Откуда l2=
, где l2 - перемещение ударного груза 18 на втором участке. Откуда l2=  - l1.
- l1.
Тогда суммарное перемещение ударного груза 18 относительно бойка 6 равно
l3= l1+ l2=  . После преобразования получаем
. После преобразования получаем
l3=  t1 Расстояние от ударного груза 18 до двуплечего рычага 11 определяется по формуле
t1 Расстояние от ударного груза 18 до двуплечего рычага 11 определяется по формуле
l = l3 - lc, где lc=  - статическое растяжение пружины 17 под действием веса ударного груза 18.
- статическое растяжение пружины 17 под действием веса ударного груза 18.
Тогда  t1-
t1-
Навесное оборудование работает следующим образом.
Клин-рыхлитель 3 устанавливается на грунт. При этом фиксаторно-прижимная головка 4 упирается в нижнюю поверхность полости 5. Затем сбрасывается боек 6, который перемещается вдоль штанги 2 и осуществляет удар по корпусу клина-рыхлителя 3. В результате удара последний внедряется в грунт. Ударный груз 18, растягивая пружину 17, перемещается вдоль штанги 2. Расстояние от ударного груза 18 до двуплечего рычага 11 при помощи устройства регулирования высотного положения ударного груза выбирается таким, что удар ударного груза 18 о двуплечий рычаг 11 происходит после погружения клина-рыхлителя 3 на требуемую глубину рыхления. При этом скалывающий элемент 14 поворачивается по часовой стрелке, производя отрыв и сдвиг из забоя грунта.
При подъеме ударного груза 18 происходит поворот двуплечего рычага 11 в исходное положение. После окончания ударного взаимодействия ударного груза 18 с двуплечим рычагом 11 и возврата двуплечего рычага в исходное положение производят изъятие клина-рыхлителя 3 из грунта. Для этого поднимают штангу 2. При ее подъеме фиксаторно-прижимная головка 4 взаимодействует с плечом 15 двуплечего рычага 11. В результате происходит поворот рычага 11, а следовательно, и скалывающего элемента 14 против часовой стрелки, при этом происходит отрыв и сдвиг из забоя дополнительного объема грунта.
После выставления клина-рыхлителя 3 на новое место фиксаторно-прижимная головка 4 опускается в полость 5 и упирается в ее нижнюю поверхность. При опускании головки 4 под действием пружин 12 и 13 происходит постепенный поворот рычага 11 и возврат скалывающего элемента 14 в исходное положение. Далее производится новый цикл погружения клина-рыхлителя.
Таким образом введение в состав устройства подпружиненного груза 18 и устройства регулирования его высотного положения, а также выполнение расстояния от ударного груза 18 до двуплечего рычага в соответствии с приведенной выше формулой позволяют рыхлить прочный грунт двуплечим рычагом в двух направлениях, тем самым повышая производительность рыхления.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВЕСНОЕ ОБОРУДОВАНИЕ ДЛЯ РЫХЛЕНИЯ ПРОЧНЫХ ГРУНТОВ | 1991 |
|
RU2014407C1 |
| НАВЕСНОЕ ОБОРУДОВАНИЕ ДЛЯ РЫХЛЕНИЯ ПРОЧНЫХ ГРУНТОВ | 1992 |
|
RU2092655C1 |
| НАВЕСНОЕ ОБОРУДОВАНИЕ ДЛЯ РЫХЛЕНИЯ ПРОЧНЫХ ГРУНТОВ | 1992 |
|
RU2092657C1 |
| НАВЕСНОЕ ОБОРУДОВАНИЕ ДЛЯ РЫХЛЕНИЯ ПРОЧНЫХ ГРУНТОВ | 1992 |
|
RU2092656C1 |
| НАВЕСНОЕ ОБОРУДОВАНИЕ ДЛЯ РЫХЛЕНИЯ ПРОЧНЫХ ГРУНТОВ | 1992 |
|
RU2047699C1 |
| НАВЕСНОЕ ОБОРУДОВАНИЕ ДЛЯ РЫХЛЕНИЯ ПРОЧНЫХ ГРУНТОВ | 1991 |
|
RU2017902C1 |
| Навесное оборудование для рыхления прочных грунтов | 1980 |
|
SU909052A2 |
| Навесное оборудование для рыхления прочных грунтов | 1980 |
|
SU926175A2 |
| Навесное оборудование для рыхления прочных грунтов | 1979 |
|
SU783425A2 |
| УСТРОЙСТВО ДЛЯ РАЗРУШЕНИЯ МЕРЗЛЫХ ГРУНТОВ | 1991 |
|
RU2014406C1 |
Использование: рыхление прочных грунтов. Сущность изобретения: боек имеет в нижней части полость, в которой расположен с возможностью взаимодействия с размещенным в сквозном пазу боковой стенки замкнутой полости плечом двуплечего рычага подпружиненный ударный груз, который снабжен механизмом регулирования его высотного положения. Он может быть выполнен в виде винта, размещенного в бойке. Ударный груз и механизм регулирования высотного положения ударного груза расположены соосно с направляющей штангой. 3 з.п.ф-лы, 4 ил.
 =
=
 +
+  sinωt
sinωt +
+  sin4
sin4 t
t ,
,
где vб - скорость бойка в момент удара о клин-рыхлитель;
ω - собственная частота колебаний ударного груза;
mк, mб, mг - масса клина-рыхлителя, бойка и ударного груза соответственно;
F - сила сопротивления грунта внедрению клина-рыхлителя на требуемой глубине рыхления;
g - ускорение свободного падения;
C - жесткость пружины;
t1 - время внедрения клина-рыхлителя после удара бойка.
