Изобретение касается измерения линейных скоростей путем измерения времени перемещения какой-либо характерной части (метки) на движущейся среде на контрольном участке пути и может быть использовано для определения среднего значения скорости рулонных материалов, а также скорости потоков жидкостей и газов.
Известен способ определения средней скорости [1] , заключающийся в возбуждении в движущейся среде меток, приеме их после прохождения контрольного участка пути, измерении времени прохождения метки и определении средней скорости по формуле
U =  , где L - длина контрольного участка пути;
, где L - длина контрольного участка пути;
δT - время прохождения контрольного участка.
При заданном значении длины определяют δTmax по формуле
δTmax =  , где Umin - минимальное значение скорости.
, где Umin - минимальное значение скорости.
Частоту F генерации меток находят из условия
F <  .
.
При этих условиях обеспечивается однозначность измерения скорости во всем диапазоне значений от Umin до Umax по измеренному времени прохождения пути меткой.
Однако в реальных условиях на выбор длины контрольного участка L накладывается ряд ограничений и условие однозначности измерений нарушается.
Выбор длины контрольного участка L зависит от длительности существования метки. Так, ионизационные метки быстро уничтожаются из-за рекомбинации ионов, а тепловые - из-за передачи тепла окружающей среде. При турбулентном режиме потока жидкости или газа метка по мере своего движения вследствие турбулентной диффузии размывается, увеличивая свой размер как в осевом, так и в радиальном направлении. Поэтому для надежного обнаружения и индикации меток целесообразна малая величина L. Но с точки зрения повышения точности измерения средней скорости движущейся среды расстояние L требуется увеличивать. В ряде случаев выбор малой величины L затруднен конструктивными и технологическими особенностями, например недопустимостью создания новых отверстий в стенке трубы или необходимостью размещения детектора метки на выходе технологического аппарата. В результате указанных ограничений длину контрольного участка L приходится выбирать большой, что приводит к снижению отношения сигнал/помеха на выходе детектора метки.
Для повышения точности индикации меток целесообразно повышать частоту генерации меток. Однако это вызывает появление неоднозначности измерений, так как период следования меток Т = 1/F становится меньше времени прохождения контрольного участка, а следовательно, частота генерации меток F > 1/ δ Tmax.
Известен способ определения среднего значения линейной скорости [2], заключающийся в генерировании последовательности электрических импульсов, преобразовании электрических импульсов в метки соответствующей физической природы в движущейся среде, приеме детектором меток на фиксированной длине контрольного участка пути, преобразовании их в электрические измерительные импульсы, формировании временного интервала между генерируемыми и измерительными импульсами, изменении частоты следования генерируемых импульсов до совпадения последующего генерируемого импульса с измерительным импульсом, измерении частоты следования совпадающих импульсов и определении среднего значения линейной скорости по формуле
v =  = L·F, где L - длина контрольного участка пути;
= L·F, где L - длина контрольного участка пути;
T - период повторения метода, равный времени прохождения контрольного участка;
F - частота следования меток.
В известном способе обеспечивается прямая пропорциональность между измеряемой скоростью и частотой следования меток.
Недостатком известных способов является неоднозначность результатов определения скорости в случае, когда период следования импульсов кратен времени прохождения меткой контрольного участка. В этом случае метка, выделенная детектором, может совпадать как с первой последующей меткой, так и со второй, третьей и более поздними метками. Из-за появления неоднозначности в фиксировании совпадения меток, следующих с высокой частотой повторения, сужается диапазон однозначного определения скорости и существенно снижается точность измерения при расширении диапазона измеряемых скоростей.
Целью изобретения является повышение точности и расширение диапазона измеряемых скоростей.
Указанная цель достигается тем, что в способе определения среднего значения линейной скорости движущейся среды, включающем генерирование последовательности электрических импульсов, разделение этой последовательности на опорные и зондирующие импульсы, преобразование зондирующих импульсов в физические метки в движущейся среде, прием детектором меток на фиксированной длине контрольного участка пути, преобразование их в электрические измерительные импульсы, формирование временного интервала между опорным и ближайшим измерительным импульсом, изменение частоты следования генерирующей импульсов до совпадения последующего опорного импульса с измерительным импульсом, измерение частоты F1 их следования и определения среднего значения линейной скорости по частоте генерируемых импульсов и длине контрольного участка пути дополнительно опорные импульсы задерживают на время, меньшее полупериода следования зондирующих импульсов, после чего увеличивают частоту следования генерируемых импульсов до значения, при котором опорные импульсы совпадают с измерительными импульсами и измеряют частоту F2 их следования, после чего ослабляют уровень зондирующих импульсов до уровня измерительных импульсов, увеличивают частоту следования генерируемых импульсов до совпадения опорных и зондирующих импульсов и измеряют частоту F3 их следования, при этом среднее значение линейной скорости U определяют как
v =  , где F1, F2, F3 - частоты следования генерируемых импульсов соответственно при первом, втором и третьем измерениях;
, где F1, F2, F3 - частоты следования генерируемых импульсов соответственно при первом, втором и третьем измерениях;
L - длина контрольного участка пути.
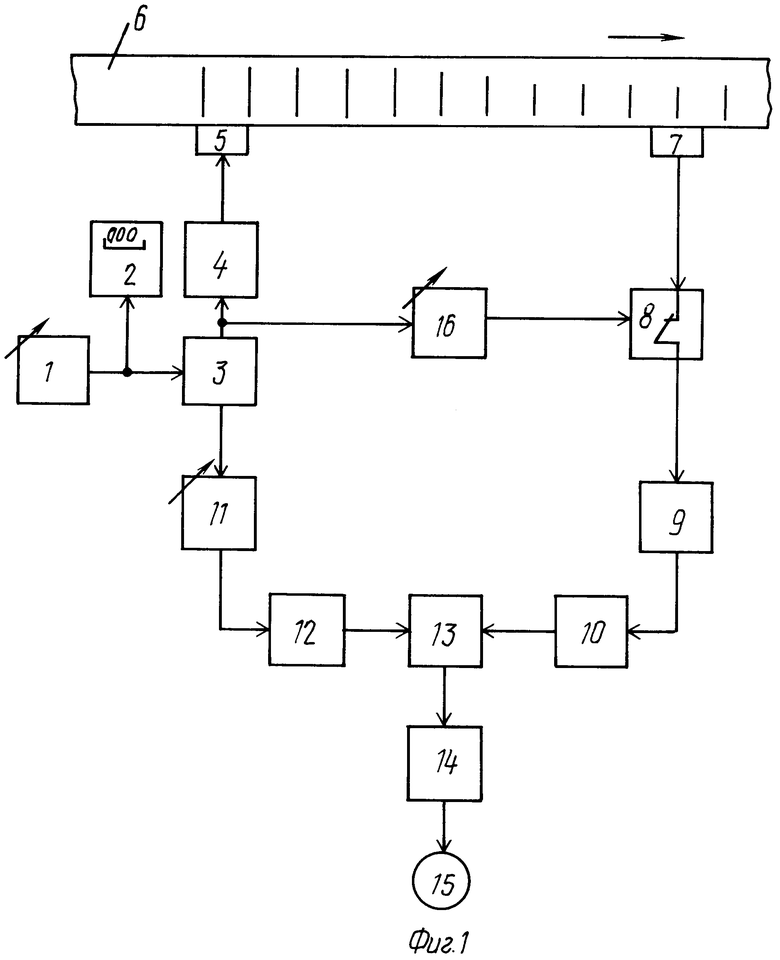
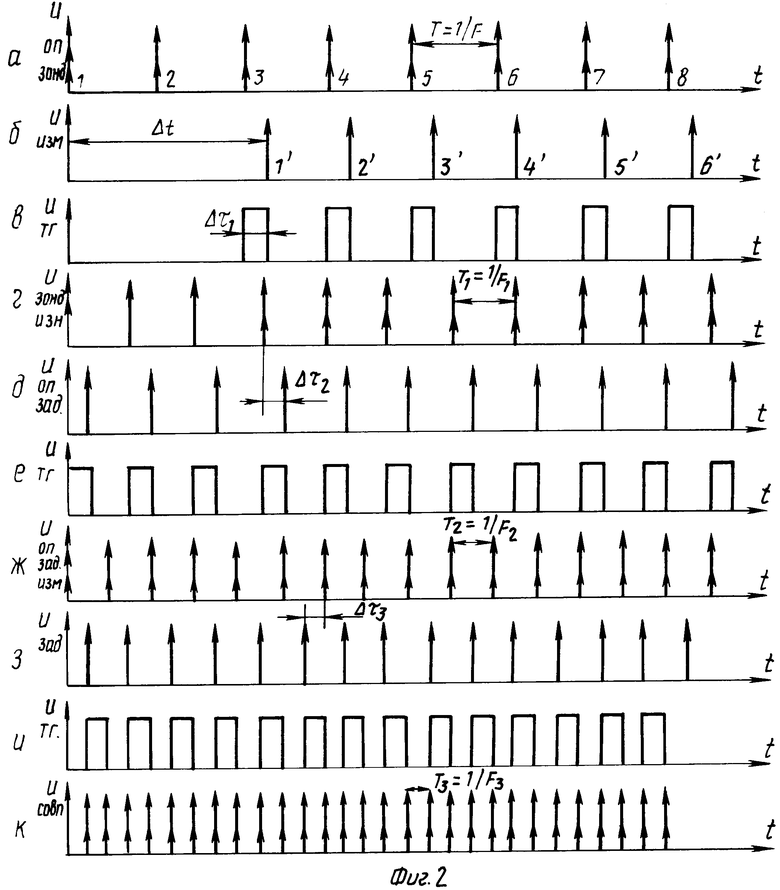
На фиг. 1 представлена структурная схема устройства для осуществления способа определения среднего значения линейной скорости движущейся среды; на фиг.2 - осциллограммы напряжений, поясняющие работу устройства.
Устройство содержит генератор импульсов регулируемой частоты 1, к которому подключены частотомер 2 и распределитель импульсов 3. К первому входу распределителя импульсов 3, подключены последовательно соединенные усилитель импульсов 4, источник меток 5, движущаяся среда 6, детектор меток 7, переключатель 8, усилитель импульсов 9 и формирователь импульсов 10, а ко второму входу - одновибратор 11 и формирователь импульсов 12. Выходы формирователей импульсов 10 и 12 соединены со входами триггера 13, к которому подключены фильтр нижних частот 14 и индикатор 15. Устройство содержит также аттенюатор 16, подключенный к первому входу распределителя импульсов 3, при этом выход аттенюатора соединен со вторым входом переключателя 8.
Определение среднего значения линейной скорости производится следующим образом.
Последовательность выходных импульсов генератора 1 разделяют на опорные и зондирующие импульсы (фиг. 2а) с помощью распределителя импульсов 3. Зондирующие импульсы усиливаются в усилителе 4 и воздействуют на источник меток 5. В качестве источника меток используют электроды, катушки, излучатели при создании ионизационных, диэлектрических, магнитных меток или дозаторы при вводе или нанесении вещества-индикатора на движущуюся среду. Движущиеся со средой 6 метки считываются детектором 7 и преобразуются в электрические измерительные импульсы (фиг.2б). В качестве детекторов меток также могут использоваться электроды, катушки, счетчики частиц, малоинерционные термопреобразователи, фотоэлементы и т.п. Измерительные импульсы через преобразователь 8 поступают на усилитель 9 где усиливаются до постоянного уровня. Из усиленных импульсов формирователем 10 создаются короткие импульсы, которые поступают на один из входов триггера 13. Опорные импульсы возбуждают одновибратор 11 с регулируемым временем задержки. Из задержанных выходных импульсов одновибратора формирователем 12 создаются короткие импульсы, поступающие на второй вход триггера 13.
Измерительные импульсы запаздывают относительно опорных импульсов на время прохождения контрольного участка пути между источником 5 и детектором 7 меток
δt = L/U (1) где δt - время прохождения контрольного участка пути;
L - длина контрольного участка пути;
U - скорость движения среды (меток).
Длительность выходных импульсов триггера 13 будет определяться разностью времен прихода опорных импульсов и ближайших к ним задержанных измерительных импульсов. Вначале задержка, вводимая одновибратором 11 устанавливается равной нулю. Если период следования импульсов равен Т, то опорный и соответствующий ему измерительный импульсы будут разделены количеством импульсов
n = EL = E
= E , (2) где F = 1/T - частота следования импульсов (меток);
, (2) где F = 1/T - частота следования импульсов (меток);
E[A] - целая часть числа A.
Длительность выходных импульсов триггера 13 (фиг.2в) пропорциональна дробной части времени задержки меток
δT1 =  - n·T =
- n·T =  - E
- E T. (3)
T. (3)
Из последовательности выходных импульсов триггера 13 фильтром 14 нижних частот выделяют постоянную составляющую напряжения, которую регистрируют индикатором 15. Частоту следования импульсов F предварительно устанавливают такой, чтобы обеспечить стабильные показания индикатора 15. Это обеспечивается повышением частоты следования меток, при котором возрастает отношение сигнал/помеха на выходе фильтра до требуемого значения.
После достижения стабильных показаний индикатора 15 плавно изменяют частоту F следования импульсов до совпадения последующих опорных импульсов с принимаемыми измерительными импульсами (фиг.2г). При достижении δ т1 = 0 получают
δt = L/U = n ˙ T1 = n/F1, (4) где F1 - частота следования совпадающих импульсов.
Измеряют частоту следования F1 импульсов (меток) частотомером 2. Дополнительно задерживают опорные импульсы одновибратором 11 на время, которое превышает порог чувствительности индикатора 15, но меньше полупериода следования импульсов (фиг.2д). Для этого плавно увеличивают постоянную времени одновибратора 11 до достижения максимальных показаний индикатора 15. Затем постоянную времени уменьшают до значения, при котором показания индикатора достигают половинного значения. В результате дополнительной задержки длительность выходных импульсов триггера 13 (фиг.2е) принимает значение
δT2 =  - δT0 -
- δT0 -  , (5) где δт0 - дополнительная задержка, вносимая одновибратором.
, (5) где δт0 - дополнительная задержка, вносимая одновибратором.
Далее увеличивают частоту следования импульсов до значения, при котором восстанавливается совпадение импульсов (фиг.2ж). При δ т2 = 0 получают - δT0 = n·T2 =
- δT0 = n·T2 =  , (6) где F2 - частота следования импульсов (меток) при втором совпадении.
, (6) где F2 - частота следования импульсов (меток) при втором совпадении.
Измеряют значение частоты F2 частотомером 2. Затем переключатель 8 переводят в противоположное состояние. При этом зондирующие импульсы через аттенюатор 16 непосредственно поступают на усилитель 9 (фиг.2з). Ослабление, вносимое аттенюатором 16 выбирают равным ослаблению, которое испытывают зондирующие импульсы в процессе преобразования в метки, приеме меток и преобразовании их в измерительные импульсы. В результате формирования коротких импульсов из ослабленных зондирующих импульсов на выходе триггера 13 формируются импульсы (фиг.2и) длительностью
δT3 = δT0 <  . (7)
. (7)
Увеличивают частоту следования импульсов до достижения совпадения (фиг. 2к). Так как дополнительная задержка δт0 < <Т2/2, совпадение будет иметь место при условии
δT0 =  = T3 , (8) где F3 - частота следования импульсов при третьем совпадении.
= T3 , (8) где F3 - частота следования импульсов при третьем совпадении.
Из соотношений (4), (6) и (8) составляют систему уравнений





(9)
Решив систему (9) относительно скорости движения меток U получают
U =  ·L. (10)
·L. (10)
Таким образом, по трем значениям частоты следования меток определяют среднее значение линейной скорости при заданном значении сигнал/помеха. При этом исключается неоднозначность измерений при длительности периода следования меток меньше времени прохождения метками контрольного участка пути (Т<<δt).
В качестве примера реализации предложенного способа определения среднего значения линейной скорости приведены результаты контроля скорости перемещения лентопротяжным механизмом магнитофона магнитной ленты. Последовательность меток на ленту наносилась с помощью магнитной головки, возбуждаемой от генератора импульсов Е6-26, частота следования которых измерялась частотомером типа Ч3-65. Длина контрольного участка пути исходя из конструктивных особенностей механизма протяжки ленты выбрана равной 0,05 m. Считывание магнитных меток производилось с помощью магнитной головки. Контроль скорости движения ленты производился в режиме воспроизведения звука.
Определение скорости осуществлялось в следующей последовательности. Генератором импульсов 1 устанавливали такую частоту следования импульсов (в данном случае не менее 45 Гц), при котором показания индикатора 15 становились устойчивыми. Затем плавно увеличивали частоту следования импульсов до установления нулевых показаний на индикаторе 15, что свидетельствовало о совпадении во времени опорных импульсов с принимаемыми измерительными. После достижения нулевых показаний частотомером 2 регистрировали первое значение частоты совпадающих импульсов F1, которое составило 49,38 Гц. Затем, с помощью одновибратора 9, выполненного на микросхеме К155АГ1 задерживали опорные импульсы на время, меньшее полупериода следования импульсов. Показания индикатора 15 при этом отличались от нуля. Плавно увеличивая частоту генератора 1 восстанавливали нулевые показания индикатора 15 и регистрировали второе значение частоты F2, которое составило 49,88 Гц. После этого переключатель 8 устанавливали положение б, показания индикатора 15 вследствие задержки импульсов в опорном канале вновь становились отличными от нуля. Частоту следования импульсов с генератора 1 увеличивали до достижения совпадения задержанных опорных и зондирующих импульсов. Момент совпадения фиксировали по нулевым показаниям индикатора 15 и регистрировали третье значение частоты F3, которое составило 192,31 Гц. Далее по формуле 10 определяли среднее значение скорости движения ленты:
U =  ·L = 9,64 cm/c.
·L = 9,64 cm/c.
После этого переключателем лентопротяжного механизма магнитофона устанавливалась другая скорость перемещения магнитной ленты и по описанной выше методике проводились замеры частот, в результате которых получено:
F1 = 207,36 Гц; F2 = 209,86 Гц; F3 = 322,58 Гц.
Средняя скорость перемещения магнитной ленты во втором режиме работы магнитофона составила 19,21 cm/с.
В результате исключения неоднозначности в определении среднего значения скорости предложенный способ по сравнению со способом-прототипом позволяет существенно расширить диапазон измеряемых скоростей и повысить точность измерений в условиях помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО МЕСТА ПОВРЕЖДЕНИЯ ВОЛОКОННОГО СВЕТОВОДА | 1992 |
|
RU2069335C1 |
| Устройство для измерения скорости распространения ультразвуковых колебаний | 1990 |
|
SU1820230A1 |
| СПОСОБ ИЗМЕРЕНИЯ ОПТИЧЕСКОЙ РАЗНОСТИ ФАЗ | 1990 |
|
RU2028577C1 |
| ИЗМЕРИТЕЛЬ РАССТРОЙКИ СВЧ-РЕЗОНАТОРА | 1991 |
|
RU2014623C1 |
| Импульсно-фазовое устройство для контроля толщины | 1990 |
|
SU1747894A1 |
| Устройство для измерения разности частот двух СВЧ резонаторов | 1988 |
|
SU1580291A1 |
| Сверхвысокочастотный влагомер | 1991 |
|
SU1794248A3 |
| Способ определения скорости распространения акустических колебаний в средах | 1986 |
|
SU1381343A1 |
| Широкополосный измеритель параметров диэлектриков | 1983 |
|
SU1109670A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НЕРАВНОМЕРНОСТИ СПЕКТРА ЭКСТИНКЦИИ ПОТОКА ИЗЛУЧЕНИЯ | 1992 |
|
RU2024846C1 |
Изобретение относится к измерительной технике и может быть использовано для определения среднего значения линейной скорости рулонных, ленточных и листовых материалов, а также скорости потоков жидкости и газа. Сущность изобретения: способ, включающий разделение генерируемой последовательности электрических импульсов на опорные и зондирующие импульсы, преобразование зондирующих импульсов в физические метки, прием детектором меток на фиксированной длине контролируемого участка, преобразование их в электрические измерительные импульсы, формирование временного интервала между опорным и ближайшим измерительным импульсами, изменение частоты следования генерируемых импульсов до совпадения последующего опорного импульса с измерительным импульсом, измерение частоты их следования, задерживание опорных импульсов, увеличение частоты следования генерируемых импульсов до совпадения опорных импульсов с измерительными импульсами, измерение частоты их следования, ослабление уровня зондирующих импульсов, увеличение частоты следования генерируемых импульсов до совпадения опорных и зондирующих импульсов, измерение частоты их следования, определение среднего значения линейной скорости по трем значениям измеренных частот генерируемых импульсов и длине контролируемого участка. 2 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ СРЕДНЕГО ЗНАЧЕНИЯ ЛИНЕЙНОЙ СКОРОСТИ движущейся среды, включающий генерирование последовательности электрических импульсов, разделение этой последовательности на опорные и зондирующие импульсы, преобразование зондирующих импульсов в физические метки в движущейся среде, прием детектором меток на фиксированной длине контрольного участка пути, преобразование их в электрические измерительные импульсы, формирование временного интервала между опорным и ближайшим измерительным импульсами, изменение частоты следования генерируемых импульсов до совпадения последующего опорного импульса с измерительным импульсом, измерение частоты F1 их следования и определение среднего значения линейной скорости по частоте генерируемых импульсов и длине контролируемого участка пути, отличающийся тем, что, с целью повышения точности и расширения диапазона измеряемых скоростей, опорные импульсы задерживают на время, меньшее полупериода следования зандирующих импульсов, после чего увеличивают частоту следования генерируемых импульсов до значения, при котором опорные импульсы совпадают с измерительными импульсами, и измеряют частоту F2 их следования, после чего ослабляют уровень зондирующих импульсов до уровня измерительных импульсов, увеличивают частоту следования генерируемых импульсов до совпадения опорных и зондирующих импульсов и измеряют частоту F3 их следования, при этом среднее значение линейной скорости v определяют из выражения
v =  ,
,
где F1, F2, F3 - частоты следования генерируемых импульсов соответственно при первом, втором и третьем измерениях;
L - длина контрольного участка пути.
