Изобретение относится к средства неразрушающего контроля гетерогенны сред и может быть использовано как для исследования диэлектрических свойств композиционных материалов и веществ в непрерывном диапазоне час тот, так и для экспресс-анализа тех нолопнческих параметров изделий на основе сложных диэлектриков по их частотным характеристикам. Наиболее близким к изобретению по технической сущности является устройство для контроля физико-меха нических параметров сложных диэлект риков, основанное на измерении малы приращений емкости датчика, обуслов ленных дисперсией диэлектрических свойств исследуемой среды в полосе частот и преобразуемых в регистрируемые фазовые сдвиги зондирующего сигнала, и содержащее автогенератор последовательно соединенные первый смеситель, первый полосовьй фильтр, частотный детектор, низкочастотный усилитель и синхронный детектор, выход которого соединен с регулирую щим входом автогенератора, фазосдви гакяцую ячейку с измерительным датчиком, первый вывод которого соедин с корпусом устройства, последовател но соединенные второй смесителд), вто рой полосовой фильтр, фазовый детектор, опорный вход которого соединен с выходом первого полосового фильтра и индикатор, а также варикап, первый вывод которого соединен с корпусом устройства, образцовый генератор, выход которого соединен с первыми входами смесителей, переключатель, один из крайних контактов которого соединен с вторым выводом варикапа, а контакт - с вре мязадающей цепью образцового генератора, коммутационньш генератор, выход которого соединен с управляющий входами переключателя и синхронного детектора и блок развертки, вьрсод которого соединен с вторым выводом варикапа, регулирук)щими входами полосовых фильтров и синхронизирующим входом индикатора, кроме того, выход автогенератора соединен с вторым входом первого смесителя и входом фазосдвигакяцей ячейки, выход которой соединен с вторым вьгоодом измерительного датчика и вторым входом второго смесителя tiD. 70 Однако известное устройство обладает недостаточной точностью изме рения малых приращений емкости, поскольку при частотной развертке образцового генератора, осуществляемой с помощью варикапа и необходимой для перестройки зондирующего сигнала автогенератора в полосе иссл,едуемых частот, изменяются не только абсолютные значения опорных частот, которыми являются несущие частоты частотно-импульсно-модулированного сигнала на выходе образцового генератора и которые используются для сопоставления с частотой зондирующего Сигнала, но и интервал между опорными частотами и, как следствие, средняя величина (за период модуляции) интервала между зондирующей и опорными частотами, т.е. смещаются рабочие точки фазового и частотного детекторов, что приводит к значительным искажениям показаний измерителя из-за нелинейности частотных характеристик обоих детекторов и в виду сложности перестройки полосовых фильтров, осуществляемой для изменения их полосы пропускания, существенно ограничивает полосу.частот зондирующего сигнала и возможности распирения диапазона измерения приращений емкости как в сторону больимх, так и в сторону малых значений. Кроме того, температурный дрейф собственныхПараметров измерительного датчика влечет за собой неинформативные изменения фазы зондирующего сигнала, которые вызывая дрейф нуля измерителя, являются источником дополнительной погрешности при измерении малых приращений емкости. Целью изобретения является повышение точности измерения малых приращений емкости, связанных с дисперсией диэлектрических свойств гетерогенных сред, в полосе частот. Поставленная достигается тем, что в широкополосный измеритель параметров диэлектриков, содержащий автогененатор, последовательно соединенные первый смеситель, первый вход которого соединен с выходом автогенератора, первой полосовой ильтр, частотный детектор, низкочастотный усилитель, синхронный детектор, первый интегратор и индикатор, а также измерительный датчик, первый вывод которого соединен с корпу
сом устройства, последовательно соединенные второй смеситель и второй полосовой фильтр, первый кварцевый генератор, переключатель, один из крайних контактов которого соединен с выходом первого кварцевого генератора, коммутационный генератор, выхо которого соединен с управляющим входом переключателя, и блок развертки, выход которого соединен с синхронизируюпу1м входом индикатора, введены второй кварцевый генератор, выход которого соединен с вторым крайним контактом переключателя, свип-генератор, выход которого соединен с первым входом второго смесителя, фазоинвертор, выход которого соединен с управляющим входом синхронного детектора, второй интегратор, выход которого соединен с регулирующим входом автогенератора, прерыватель, оди из контактов которого соединен с входом BTOjjoro интегратора, образцовый датчик, первый вывод которого соединен с корпусом устройства,.коммутатор, крайние контакты которого соединены с вторыми выводами измерительного и образцового датчиков соответственно, а средний контакт с времязадающей цепью автогенератора и делитель частоты, выход которого соединен с управляющими входами фазоинвертора, прерывателя и коммутатора, кроме того, выход второго полосового фильтра соединен с вторым входом первого смесителя, средний контакт переключателя соединен с вторым входом второго смесителя, выход блока развертки соединен с входом свип-генератора, выход синхронного детектора соединен с вторым контактом прерывателя, а выход коммутационного генератора - с входами фазоинвертора и делителя частоты.
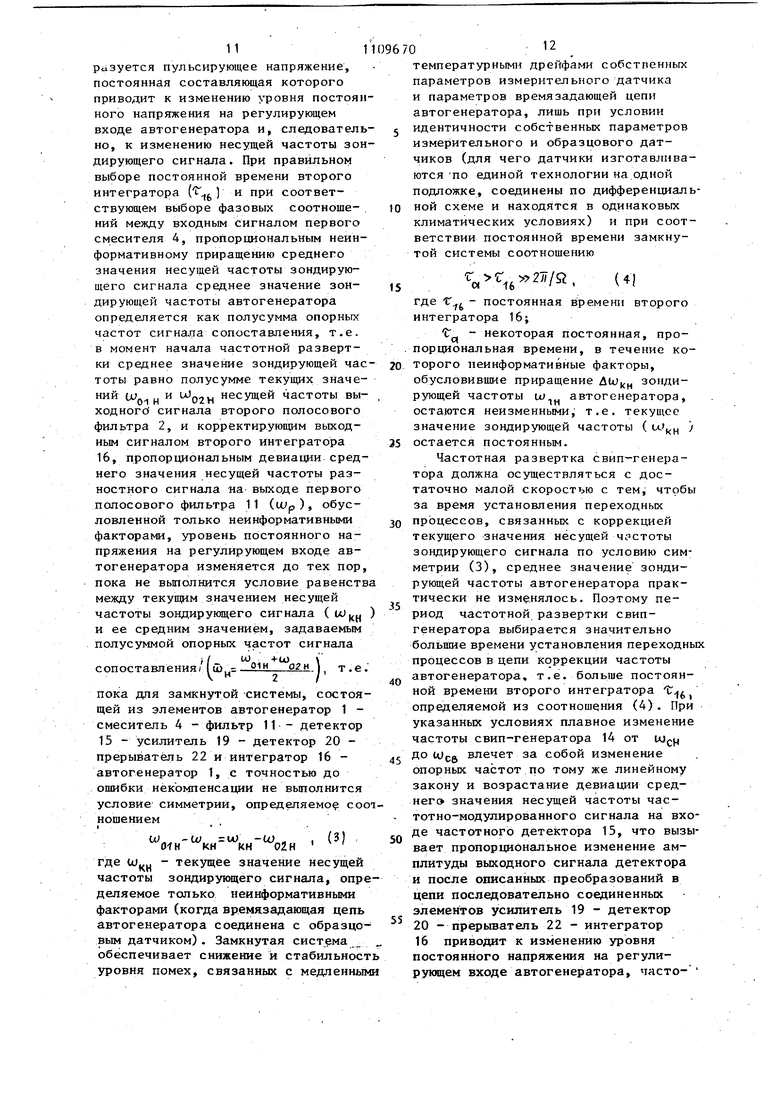
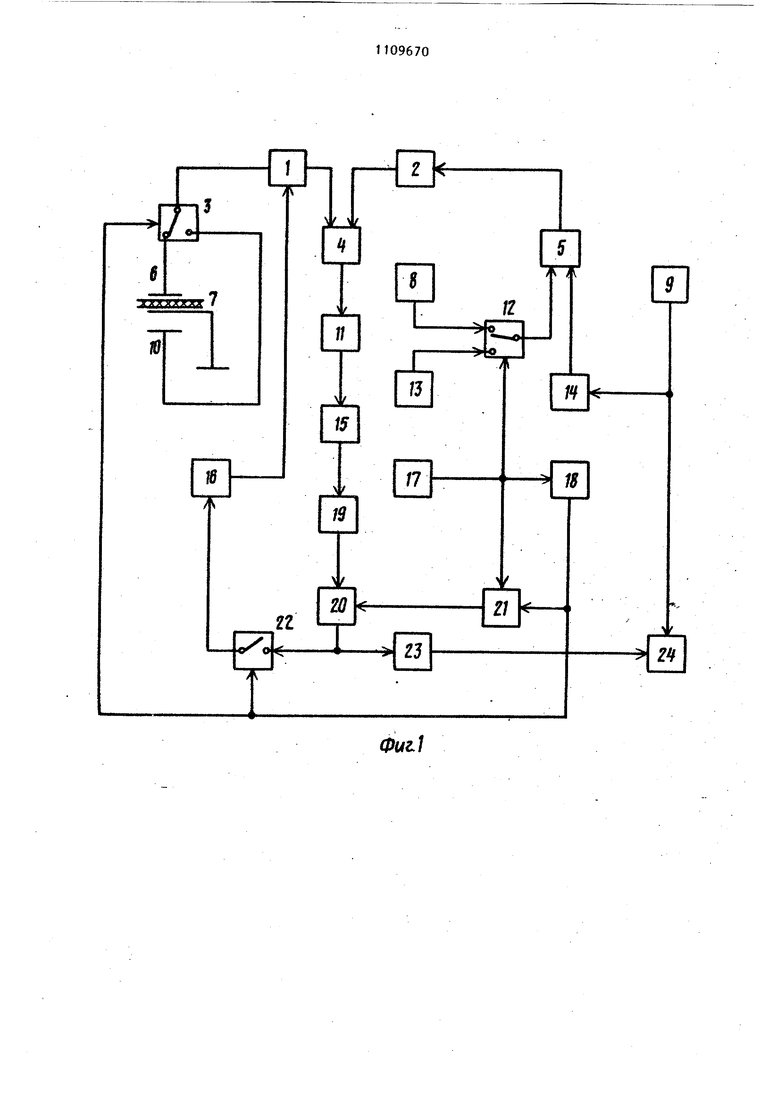
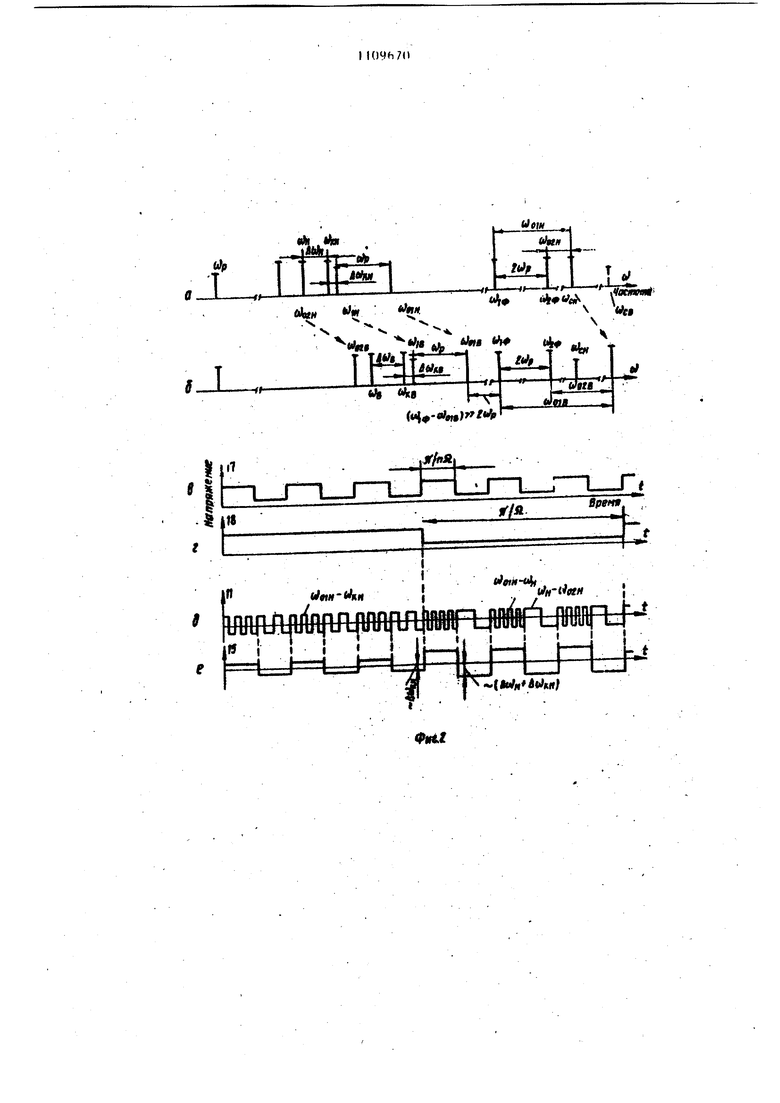
На фиг. 1 изображена, блок-схема предлагаемого измерителяj на фиг. 2 а 26- спектры частот с вип-генератор а кварцевых генераторов, области спектра зондирующего сигнала автогенератора, лежащие у нижнего (а) и верхнего (б) пределов полосы исследуемых частот, и соответствующие этим частотам области спектра несущих частот сигнала на выходе первого попосового фильтра; на фиг.2 в 2е, За-Зе - эпюры напряжений на выходе некоторых блоков схемы измерителя, а именно: коммутационного
генератора,делителя частоты, первого полосового фильтра, частотного детектора, низкочастотного усилителя, фазоинвертора, синхронного де5 тектора, прерывателя, второго и первого интеграторов соответственно, причем индексы у осей ординат, указывают к какому блоку относится представленный график.
О Измеритель содержит автогейератор 1, второй пхэлосовой фильтр 2, коммутатор 3, первый 4 и второй 5 смесители, измерительный датчик 6 с объектом 7 контроля, первый квар5 цевый генератор 8 фиксированной частотыU/, блок 9 развертки, образцовый датчик 10, первый полосовой фильтр 11, переключатель 12, второй кварцевый генератор 13 фиксирован0 ной частоты со,, , свип-генератор 14
с полосой частот to-to J, частотный
-i с -f CB.,
детектор 15, второй интегратор 16,
последовательно соединенные коммутационный генератор 17 частоты n5J
5 и делитель 18 частоты коммутационного генератора на п , где п- число, кратное десяти, последовательно соединенные низкочастотный усилитель 19 частоты коммутации п и синхрон0 ный детектор 20, фазоинвертор 21, прерыватель 22, первый интегратор
23и индикатор 24.
Выход автогенератора 1 через последовательно соединенные пер5 вый смеситель 4, первый полосово11 фильтр 11, частотный детектор 15, низкочастотный усилитель 19 соединен с входом синхронного детектора 20, выход которого через первый ин0 тегратор 23 соединен с индикатором
24и через прерыватель 22 - с входом второго интегратора 16, выход которого соединен с автогенератором 1.
Измеритель работает следующим
5 образом.
С выхода автогененатора 1 на один из входов первого смесителя 4 (фиг. 1) поступает сигнал, частота которого Определяется уровнем посто0 яиного напряжения на регулирующем входе автогенератора и зависит от величины суммарной расстройки зондирукнцей частоты, вызванной температурным дрейфом собственных парамет- ров измерительного 6 и образцового . 10 датчиков, поочередно (с частотой сигнала коммутации и ) подключенных с помощью коммутатора 3 к времязадающей цепи автогенератора, и 5 .информативным приращение м емкости измерительного датчика, обусловленным диэлектрическими свойствами объекта 7 контроля, причем частотная развертка зондирующего сигнала в полосе исследуемых частот осуществляется при изменении уровня напряжения на регулирующем входе ав тогенератора. Одновременно на другой вход смеситепя 4 с выхода второго полосового фильтра 2 поступает сигнал, несущая частота которого формируется из разностных частот, образующихся в результате взаимодействия двух пбступахэщих на второй смеситель 5 разночастотных сигналов. На один из входов смесителя через контакты переключателя 12, управляемого коммутационным генератором 17, с выходов первого 8 и второго 13 кварцевых генераторов поочередно (с частотой сигнала управления пЯ) подаются гар монические сигналы, частоты кото- рых фиксированы и равны соответстВ то же время на др вен но и гой вход второго смесителя с вькода .свип-генератора 14 поступает синусо идальный сигнал, частота которого плавно возрастает в пределах от ui до по линейному закону, задавае мому пилообразным напряжением блока 9 развертки. Причем частоты квар цевых генераторов 8 и 13 ( и и) соответственно) лежат ниже полосы частот свип-генератора 14 ( и выше частот автогенератора 1 ( 1х ) 1 в пределах которых исследуются диэлектрические свойства объекта Вследствие частотной манипуляции одного из входных сигналов второ го смесителя 5 и плавной развертки частоты сигнала на его другом входе на выходе второго смесителя образуется частотно-модулированное напряжение, модулирующая частота которого задается Коммутационным генератором 17, вырабатывающим напряжение частоты прямоугольной формы, подаваемое на управляющий вход переключателя 12, а значения комбинационных частот, составляющих спект несущей частоты, одновременно плавно изменяются вслед за изменением частоты свип-генератора. При этом одна из составляющих, равная разност частот свип-генератора 14 и первого кварцевого генератора 8 (w-((,), изменяется в интервале частот от о06до , а другая составляющая, равная разности частот свип-генератора и второго кварцевого генератора 13 (с02ф), принимает непрерывный ряд значений OTUJ до ujjjg. Обе состав-, ляющих вьделяются вторым полосовым фильтром, полоса пропускания которого выбрана так, чтобы обеспечить перекрытие диапазона частот от до в который входят оба интервала разнрстных частот, и исключить паразитное прохождение несущих частот входных сигналов второго смесителя и комбинационных частот, равных сумме указанных-несущих. Предпол-ожим, что в начал ьньй момент после калибровки измерителя частоты зондирующего сигнала автогенератора 1 равна ш , а частота свип-генератора 14 фиксирована и соответствует нижнему пределу его полосы частот , т.е. начальному моменту периода частотной развертки. При поочередном подключении измерительного 6 и образцового 10 датчиков к времязадающей цепи автогенератора частота зондируклцего сигнала периодически изменяется, принимая поочередно значения uj и uj j соответственно, период следования которых задается периодом сигнала управления (2 л/И), поступающего на управляющий вход коммутатора 3 с выхода делителя 18 частоты. Сигнал управления формируется делением частоты tiQ коммутационного генератора 17 на число п , кратное десяти. В результате с выхода автогенератора в первый смеситель 4 поступает квазигармонический сигнал, расстройка несущей частоты которого в один из полупериодов Л(й (при . подключении образцового .чатчика) зависит только от неинформативных факторов и равна ui , а в следующий полупериод работы коммутатора 3 (при подключении измерительного датчика с объектом контроля) суммарная расстройка несущей частоты пропорциональна информативному приращению емкости измерительного датчика, связанному с диэлектрическими свойст вами объекта 7, и неинформативному приращению, вызванному температурным дрейфом собственной емкости измерительного датчика, и равна соответственно ДШи+йю.,,. . п „ Одновременно на второй вход смесителя 4 с выхода второго полосового 71 фильтра 2 подается частотно-модулированньй сигнал, несущая частота которого с частотой модуляции hS поочередно принимает два значения oiH о2И Р этом частота квар цевых генераторов и ija и частота , соответствующая нижнему пределу полосы частот свип-генератора, подобраны так, что в начальный момент времени, соответствующий началу периода частотной развертки, одна из вьщеляемых вторым полосовым фильтром разностных частот ( лежит ниже, а другая (и)) - выше зондирующей частоты w автогенератора, которая является нижним пре делом полосы исследуемых частот. Из смеси несущих частот сигналов, поступающих на соответствующие входы первого смесителя 4, первьпЧ полосовой фильтр 11 вьделяет и формирует (ограничивая по амплитуде и устраняя паразитную амплитудную модуляцию) частотно-модулированный сигнал, моду лирующая частота которого равна tiSl несущая определяется разностью несущих частот входных сигналов смесителя, т.е. в один из полупериодов ТГ/Й (при подключении образцового датчика 10 к времязадающей цепи автогенератора 1) несущая частота выде ляемого фильтром 11 разностного сигнала принимает поочередно (с частото пЯ ) значения ( кн а при включении измерительного датчика 6 с объектом 7 контроля () и (( Интервал между мгновенными значениями несущих частот ( и Wj-ju ) выделяемого вторым полосовым фильтром 2 сигнала остается постоянным в течение всего периода частотной развертки и всегда равен разности фиксированных частот кварцевых генераторов(и)ф-и)2ф) что позволяет избавиться от необходимости перестройки первого полосового фильтра 11 и за счет выбора оптималь ного разноса опорных частот, в качестве которых избираются два последовательных мгновенных значения несу щей частоты сигнала, выделяемого вто рым фильтром 2 за один период 27Г/пЯ работы переключателя 12, дает возможность использовать интервал между ними (опорными частотами) в качестве меры для определения величины девиации частоты зондирующего сигнала Кроме того, при выборе оптимального разноса опорных частот следует 708 учесть изменения величины расстройки зондирующей частоты автогенератора, вызванные изменениями информативного приращения емкости измерительного датчика 6 в полосе исследуемых частот, обусловленными дисперсией диэлектрических свойств объекта 7 контроля, оптимальный разнос опорных частот, задаваемьп разностью частот кварцевых генераторов, должен быть таким, чтобы максимальная величина информативной расстройки (4w) зондирующей частоты не превышала половины интервала между опорными частотами . При этом частоты кварцевых генераторов и нижний предел полосы частот свип-генератора выбираются Так, чтобы в момент начала частотной развертки соблюдались условия баланса опорньк частот (мгновенных значений несущей частоты сигнала на вькоде второго полосового фильтра 2) и несущей частоты выходного сигнала автогенератора, которые в отсутствие неинформативных факторов определяются соотношениями .,н где - значение зондирующей частоты автогенератора 1, соответствую:1(ие нижнему пределу полосы исследуемых частот и определяемое только собственными параметрами измерительного 6 и образцового 10 датчиков (которые после калибровки в отсутствие объекта 7 контроля идентичны); йи) - максимальная величина ин.формативного приращения несущей частоты зондирующего сигнала в полосе исследуемых частот, обусловленная дисперсией диэлектрических свойств объекта / контроля tu , w - мгновенные значения несущей частоты частотномодулированного напряжения на выходе второго полосового фильтра 2, соответствую1цие одному периоду 2Я(п5 работы переключателя 12 в начальный момент периода частотной развертки; U)p - среднее значение разнос ти между несущей частот зондирующего сигнала на выходе автогенератора t и несущими частотами частотно-модулированног сигнала на выходе второ го полосового фильтра 2 которое в течение всего периода частотной развертки остается неизмен ным и определяется выражением) гдесо иш - фиксированные частоты первого 8 и второго 13 кварцевых генераторов соответственно. После частотного детектирования разностного частотно-модулированног сигнала в частотном детекторе 15 на вход низкочастотного усилителя 1 поступает амплитудно-модулированное напряжение прямоугольной формы с не сущей частотой п5 , амплитуда которого зависит от девиации среднего значения несущей частоты (Ofp) разностного частотно-модулированного сигнала на входе частотного детекто ра, которое определяется выражением (2). При подключении образцового датчика 10 к времязадающей цепи автогенератора 1 девиация пропорциональна неинформированному приращениюди несущей частоты зондирующег сигнала иц, , вызванному температурным дрейфом собственных параметров образцового датчика, и при под1 лючении измерительного датчика 6 с объектом 7 контроля девиации определяется суммарным приращением Лсо (f зондирующей частоты которое в этом случае обусловле«о инфор мативны приращением емкости измерительного датчика под влиянием диэлектрических свойств объекта контр ля и неинформативными факторами. Причем в последнем случае неинформативные факторы могут стать причиной грубых искажений, если девиация настолько чрезмерная, что вызывает смещение текущего значения несущей частоты входного сигнала частотного детектора в область нелинейности его частотной характеристики, прямо линейность которой обеспечивается на ограшшенном участке частсмного диапазона. 70 . Низкочастотный усилитель 19, настроенный на первую гармонику частоты п5, вьреляет Из вькодного прямоугольного амплитудно-модулированного напряжения частотного детектора синусоидальньй сигнал, амплитуда, которого в один из полупериодов TT/Q пропорциональна алгебраической сумме информативного и неинформативногс приращений частоты зондирующего сигнала, а в следующий полупериод содержит информацию только о неинформативных факторах, влияющих на изменения частоты того же сигнала. С выхода усилителя 19 амплитудно-модулированный сигнал частоты tjb подается на сигнальный вход синхронного детектора 20, на управляющий вход которого с выхода коммутационного генератора через фазоинвертор 21 поступает прямоугольное напряжение той же частоты. Фаза этого напряжения синхронно инвертируется в моменты переключения датчиков по сигналу частоты. Q , одновременно поступающему с делителя 18 частоты на управляющие входы фазоинвертора 21 и коммутатора 3. После синхронного детектирования (по двухтактной схеме) амплитудно-модулированного сигнала на выходе детектора 20 образуется последовательность пакетов выпрямленных полуволн синусоиды, полярность которых изменяется с частотой Q , при этом длительность пакета равна ///5 , а амплитуда полуволн синусоиды частоты пи в пакетах одной полярности (одного знака) пропорциональна амплитуде входного синусоидального сигнала детектора в соответствующий полупериод TT/Q . Прерыватель 22, включенный на вькоде синхронного детектора, замыкается по сигналу управления с делителя частоты в моменты подключения образцового датчика 10 х времязадающей цепи автогенератора 1, в результате чего на вькоде прерывателя формируется периодическая последовательность па.кетов длительностью n/Q , следующих с частотой Q и состоящих из полуволн синусоиды (частоты пи ) одной полярности, амплитуда которых пропорциональна только неинформативному приращению 4 UJ1 несущей частоты зондирующего сигнала u) . В результате усреднения пакетного однополярного напряжения на выходе второго интегратора 16 об11разуется пульсирующее напряжение, постоянная составляющая которого приводит к изменению уровня постоян ного напряжения на регулирующем входе автогенератора и, следователь но, к изменению несущей частоты зон дирующего сигнала. При правильном выборе постоянной времени второго интегратора () и при соответствующем выборе фазовых соотношеНИИ между входным сигналом первого смесителя 4, пропорциональным неинформативному приращению среднего значения несущей частоты зондирующего сигнала среднее значение зондирующей частоты автогенератора определяется как полусумма опорных частот сигнала сопоставления, т.е. в момент начала частотной развертки среднее значение зондирующей час тоты равно полусумме текущих значений (JJ и несущей частоты выходногс сигнала второго полосового фильтра 2, и корректирующим выходным сигналом второго интегратора 16, пропорциональным девиации среднего значения несущей частоты разностного сигнала на выходе первого полосового фильтра 11 (Шр ), обусловленной только неинформативными факторами, уровень постоянного напряжения на регулирующем входе автогенератора изменяется до тех пор пока не выполнится условие равенств между текущим значением несущей частоты зондирующего сигнала ( ю и ее средним значением, задаваемым полусуммой опорных частот сигнала (А) 4-U} 01Н огн сопоставления/ пока для замкнутой системы, состоя щей из элементов автогенератор 1 смеситель 4 - фильтр 11 - детектор 15 - усилитель 19 - детектор 20 прерыватель 22 и интегратор 16 автогенератор 1, с точностью до ощибки некомпенсации не выполнится условие симметрии, определяемо со ношением % н- кн чн-%2н где - текущее значение несущей частоты зондирующего сигнала, опр деляемое только неинформативными факторами (когда времязадающая цепь автогенератора соединена с образцо вым датчиком). Замкнутая система обеспечивает снижение и стабильнос уровня помех, связанных с медленны 012 температурными дрейфами собстпенных параметров измерительного датчика и параметров времязадающей цепи автогенератора, лишь при условии идентичности собственных параметров измерительного и образцового датчиков (для чего датчики изгoтaвJrивaютсяПО единой технологии на одной подложке, соединены по дифференциальной схеме и находятся в одинаковых климатических условиях) и при соответствии постоянной времени замкнутой системы соотношегшю . ( где постоянная времени второго интегратора 16; Сд некоторая постоянная, пропорциональная времени, в течение которого неинформативные факторы, обусловившие приращение &(}.. зондиругащей частоты и,. автогенератора, W остаются неизменными т.е. текущее значение зондирующей частоты ( t. ) остается постоянным. Частотная развертка свип-генератора должна осуществляться с достаточно малой скоростью с тем, чтобы за время установления переходных процессов, связанных с коррекцией текущего значения несущей частоты зондирующего сигнала по условию симметрии (3), среднее значение зондирующей частоты автогенератора практически не изменялось. Поэтому период частотной развертки свипгенератора выбирается значительно большие времени установления переходных процессов в цепи коррекции частоты автогенератора, т.е. больше постоянной времени второго интегратора t определяемой из соотношения (4). При указанных условиях плавное изменение частоты свип-генератора 14 от UJ. до WCB влечет за собой изменение опорных частот по тому же линейному закону и возрастание девиации среднегэ значения несущей частоты частотно-нодулиррванного сигнала на входе частотного детектора 15, что вызывает пропорциональное изменение амплитуды выходного сигнала детектора и пойле описанных преобразований в цепи последовательно соединенных элементов усилитель 19 - детектор 20 - прерыватель 22 - интегратор 16 приводит к изменению уровня постоянного напряжения на регулирукнцем входе автогенератора, частота которого синхронно с частотной разверткой свип-генератора плавно изменяется в пределах полосы исследуемых частот ( ), ширина которой задается шириной полосы частот свип-генератора, Причем разнос опорных частот, которые в начальный момент периода развертки определяются соотношениями
и W -to -00 (5)
UJ -U) -U) ,
01Н СН 1ф 02Н СН 2Ф
а в конце периода частотной развертки - соотношениями
, (И
01в Св-%ф
1 со.
где uJj.( и W(..g - соответственно нижний и верхни пределы полосы частот свип-генератора 14, и
026 °
01Н
венные значения несущей частоты частотно-модулиропанного напряжения на выходе второго полосового фильтра 2, соответствукмцие одному периоду ( 271 LSI ) работы переключателя. 12 в момент окончания периода pi зверткй, остается неизменным в течение всего периода частотной развертки и равным разности частот кварцевых генераторов. Рабочая точка частотного детектора 15, определяемая как среднее значение разности между несущей частотой зондирующего сигнала и опорными частотами, также не зависит от частотной развертки, поэтому нелинейность частотной характеристики детектора 15 не влияет на показания измерителя, если в пределах полосы исследуемых частот выполняются условия баланса опорных частот и .зондирующей частоты (1), поскольку линейность частотной характеристики детектора 15 обеспечивается в этом случае в пределах узкого диапазона частотWptЛWj.KpoMe того, стабилизация разноса опорных частот .позволяет повысить помехозащищенность входных цепей аналогового тракта за счет сужения полосы пропускания первого полосового фильтра 1 1 .
Остаточное напряжение .корректирующего сигнала на регулирующем входе автогенератора, связанное с ошибкой некомпенсации замкнутой системы, не искажает результат измерений и увеличивает погрешность нуля измерителя в том случае, если оно обусловлено медленным дрейфом частоты автогенератора, связанным с
температурными изменениями параметро времязадающей цепи и собственных параметров измерительного и образцового датчиков (т.е. если выполнены условия (1) и (А) для замкнутой системы), поскольку неинформативные составляющие выходного сигнала синхронного детектора, пропорхщональные приращению частоты автогенератора, вызванному внешними неинформативными факторами, взаимокомпенсируются в первом интеграторе 23 благодаря инверсии полярности пакетов полуволн синусоиды, следуюш 1х поочередно с выхода синхронного детектора 20 на первый интегратор и вызывающи периодический процесс перезаряда его накопительных элементов. Поэтому на выходе первого интегратора 23 появляется пульсирующее напряжение, уровень постоянной составляющей которого пропорционален некомпенсированной величине информативного приращения /Su), частоты ш выходного сигнала автогенератора, которое вызывается приращением емкости измерительного датчика 6,, связанным с диэлектрическими свойствами объекта 7 контроля на данной частоте. Неинформативное приращение этой частоты, связанное с неидентичностью собственных параметров измерительного 6 и образцового 10 датчиков, устраняется перед началом измерений в режиме калибровки.
Режим калибровки проводится в отсутствие объекта контроля и заключается в ручной регулировке с помощью подстроечного элемента параметров времязадающей цепи автогенератора и в подстройке емкости образцового датчика с помощью триммера (.регулирующие элементы автогенератора и образцового датчика не показаны). Блок развертки на время калибровки измерителя отключается. Регулировки ведутся до тех пор, пока на индикаторе 24 не установится нулевое показание, что происходит когда частота автогенератора соответствует условию устанавливаемому для текущего значения зондирукяцей частоты и соответствующих значений опорных частот соотношением (3) в оба такта работы коммутатора 3, т.е. когда собственные емкости измерительного и образцового датчиков становятся идентичными с точностью до погрешности отсчета нулевого -показания. Пульсация выходного напряжения первого интегратора 23 сглаживается при соответствующем подборе постоянной интегрирования f, , которая должна быть близкой величине постоянной времени , второго интегратора 16 и соответственно должна удовлетворять аналогичным условиям (4). Период развертки частоты свипгенератора выбирается гораздо большим времени установления переходных процессов в цепи коррекции частоты автогенератора, поэтому постоянАая времени блока 9 развертки должна быть выше постоянных времени первого и второго интеграторов, т.е. минимальный период частотной развертки должен быть сравним с постоянной времени Т определяемой соотношением (4)., Блок 9 развертки, необходимьй для перестройки частоты свип-генератора 14, служит одновременно для создания частотных меток на индикаторе 24, постоянное напряжение на сигнальном входе которого изменяется в зависимости от изменений информативного приращения емкости измерительного датчика 6, связанных с дисперсией диэлектрических свойст объекта 7 контроля, при частотной развертке зондирующего сигнала авто генератора в полосе частот (w. -W Таким образом, введение сйипгенератора и второго кварцевого генератора обеспечивает формирование такого сигнала (используемого для сопоставления с зондирующим сигналом автогенератора), разнос несущих частот которого не зависит от абсолютных значений этих частот, что позволяет за счет выбора оптимальных соотношений между опорными частотами и несуюорми частотами зондирующего сигнала подавить влияние нелинейности частотной характеристи ки частотного детектора при разверт ке частоты зондирующего сигнала и за счет сужения полосы пропускания перв9го полосового фильтра существ но повысить помехозащищенность цепе высокочастотной части аналогового тракта.Введение в цепь автоподстройки зондирующей частоты прерывателя с вторым интегратором и во времязадающую цепь автогенератора образцового датчика с коммутатором позволяет с точностью до ошибки некомпенсации замкнутой цепи коррекции исключить медленные дрейфы частоты зондирующего сигнала, связанные с температурно-временной нестабильностью параметров времязадающей цепи автогенератора и собственных параметров измерительного датчика. Кроме того, введение фазоинвертора с делителем частоты в управляющую цепь синхронного детектора позволяет разделить информативный и неинформативные параметры информационного сигнала и при последующем интегрированйи исключить погрешность, определяемую величиной ошибки некомпенсации корректирующего сигнала, т.е. позволяет осуществить автоматическую установку нуля в процессе измерения, что в сравнении с известным устройством дает возможность существенно повысить точность измерения малых приращений емкости, связанных с дисперсией диэлектрических свойств гетерогенных сред, в полосе частот. Предлагаемый измеритель может быть использован на предприятиях химической и легкой промьшшепности, выпускакяцих изделия на основе композиционных полимерньк диэлектриков, для автоматизации операций, связанных с контролем технологических параметров выпускаемой продукции, что обеспечит оптимальное управление режимами технологических процессов и позволит повысить качество готовых изделий. Кроме того,использование измерителя для экспрессанализа технологических параметров готовой продукции или полуфабрикатов по частотной зависимости от диэлектрических свойств позволит снизить трудоемкость операций при проведении анализов и сократить затраты ручного труда.
0Ut1
AW
,4V
VeC№IHIli
Цф 4«ц
4t
(



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля многослойных диэлектриков | 1983 |
|
SU1095101A1 |
| Устройство для измерения емкости диэлектриков | 1980 |
|
SU938202A1 |
| Диэлькометрический измеритель концентрации пластификатора в пленочных материалах | 1982 |
|
SU1081566A1 |
| Измеритель частотных свойств диэлектриков | 1982 |
|
SU1041922A1 |
| Автогенераторный измеритель дисперсии диэлектрических свойств полимерных материалов | 1983 |
|
SU1100580A1 |
| Автогенераторный диэлькометрический измеритель | 1980 |
|
SU868634A1 |
| Широкополосный диэлькометрический измеритель | 1980 |
|
SU949541A1 |
| Измеритель параметров диэлектриков и проводящих сред | 1982 |
|
SU1051456A1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ПРОДУКТОПРОВОДОВ | 2007 |
|
RU2343499C1 |
| ИМПУЛЬСНЫЙ СВЕРХШИРОКОПОЛОСНЫЙ ДАТЧИК | 2008 |
|
RU2369323C1 |
ЩИРОКОПОЛОСНЫЙ ИЗМЕРИТЕЛЬ . ПА АИЕТРОВ ДИЭЛЕКТРИКОВ, содержащий автогенератор, последовательно соединенные первый смеситель, первый вход которого соединен с выходом автогенератора, перЁый полосовой фильтр, частотный детектор, низкочастотный усилитель, синхронный детектор, первый интегратор и индикатор, а также измерител1 ный датчик, первый вывод которого соединен с корпусом устройства, последовательно соединенные второй смеситель и второй полосовой фильтр, первый кварцевый генератор, переключатель, один из крайних контактов которого соединен с выходом первого кварцевого генератора, коммутационный генератор, выход которого соединен с управляющим входом переключателя, и блок развертки, вькод которого соединен с синхронизирующим входом индикатора, отличающийся тем, что, с целью повышения точности измерения мальк приращений емкости. ii 13 связанных с дисперсией диэлектрических свойств гетерогенных сред, в полосе частот, в него введены второй кварцевый генератор, выход которого соединен с вторым крайним контактом переключателя, свип-генератор, выход которого соединен с первым входом второго смесителя, фазоинвертор, выход которого соединен с управляющим входом синхронного детектора, второй интегратор, выход которого соединен с регулирующим входом авто- генератора, прерыватель, один из контактов которого соединен с входом второго интегратора, образцовьй датчик, первый вывод которого соединен с корпусом устройства, коммутатор, (Л крайние контакты которого соединены с вторыми выводами измерительного и образцового датчиков соответственно, а средний контакт - с времязадающей § цепью автогенератора, и делитель частоты, выход которого соединен с управляющими входами фазоинвертера, о со а прерывателя и коммутатора, кроме того, выход второго полосового фильтра соединен с вторым входом первого смесителя, средний контакт переклю чателя соединен с вторым -входом второго смесителя, выход блока развертки соединен с входом свип-генератора, выкод синхронного детектора соединен с вторым контактом прерывателя, а выход коммутационного ге.нератора - с : входами фазоинвертора и делителя частоты.
L
.- --Т-а
Jk
.г-Т
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Широкополосный диэлькометрический измеритель | 1980 |
|
SU949541A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
