Изобретение относится к технике антенных измерений, в частности бортовых антенн летательных аппаратов (ЛА), и может быть использовано для прогнозирования электромагнитной совместимости бортовых радиоэлектронных средств (РЭС), а также определения в целом электромагнитной обстановки (ЭМО) вокруг полномасштабного объекта измерений с учетом влияния его проводящей поверхности.
Известен стенд фирмы SCIENTIFIC - ATLANTA INC (США) для определения характеристик бортовых антенн полномасштабных объектов ЛА (SCINTIFIC - ATLANTA Instrumentation Product Catalog. 1975. Фото прилагается). При этом измерения характеристик бортовых антенн с учетом проводящей подстилающей поверхности ЛА производятся методом дальней зоны путем вращения самого объекта в ограниченных углах поворота и при закрелении его на опорно-поворотном устройстве последовательно с разных позиций.
В качестве аналога можно отметить автоматизированный стенд для измерения характеристик бортовых антенн в дальней зоне в условиях радиобезэховой камеры.
Очевидно, что процедуры проведения подобных измерений с полномасштабными объектами громоздки, дорогостоящи и требуют многом времени. В то же время при насыщенности объекта бортовыми РЭС такие измерения неизбежны. Существенным фактором при измерении электромагнитных характеристик крупногабаритных объектов выступает расстояние между объектом и вспомогательной антенной на вышке. Для измерений методом дальней зоны при размерах объекта в несколько десятков метров эти расстояния могут достигать сотен метров, т. е. измерения выводятся из безэховых камер на открытые полигоны. При этом объект приходится приподнимать от земли для уменьшения ее влияния.
Альтернативой являются измерения на масштабных моделях объектов ЛА, проводимых на соответствующих стендах методами дальней и ближней зоны. Однако при этом существенно снижается точность измерений, поскольку невозможно достичь полного геометрического и электромагнитного подобия модели с оригиналом.
Таким образом наиболее предпочтительным является вариант измерения характеристик антенн методом ближней зоны, причем для натуральных полномасштабных объектов.
Наиболее близким методически и конструктивно представляется стенд, описанный в работе Адамяна Р.М., Асатряна Д.Г, и Геруни С.П. "Измерительный комплекс "Сфера-2", - В кн.: "Антенные измерения. Тезисы докладов Четвертой Всесоюзной Конференции "Метрологическое обеспечение антенных измерений (ВКАИ-4), Ереван, 1987, с.237. Стенд обеспечивает измерение полей и в целом ЭМО вокруг крупногабаритных антенн, масштабных моделей объектов, а также фрагментов полномасштабных объектов по сферической поверхности в их ближней зоне.
Однако известный стенд мало приспособлен для измерения ЭМО вокруг крупных полномасштабных объектов ввиду сложности процедуры установки их на поворотный стенд и приведения во вращение вокруг азимутальной оси. Кроме того, устройство в одном цикле измерений обеспечивает исследование лишь верхней полусферы вокруг объекта, в то время как на реальном ЛА бортовые антенны и другие РЭС размещаются также и в нижней части фюзеляжа, для чего производят перезакрепление объекта.
Цель изобретения - упрощение методики и процедуры измерений при увеличении их информативности (углового сектора измерений) и сокращении времени измерений.
Это достигается тем, что в стенде для определения электромагнитной обстановки вокруг полномасштабного объекта, состоящем из его опорно-поворотного устройства, вертикально установленной криволинейной угломестной направляющей и измерительного зонда с возможностью перемещения по ней вертикальная угломестная направляющая выполнена в виду полуокружности, на которой с возможностью перемещения установлен первый измерительный зонд, сама она установлена с возможностью перемещения на горизонтально расположенной азимутальной направляющей в виде полной окружности, при этом опорно-поворотное устройство объекта отсутствует, а испытуемый объект неподвижно установлен внутри пространства, образованного угломестной и азимутальной направляющими, в плоскости последней размещены секции прямолинейных направляющих и второй измерительный зонд с возможностью перемещения по ним.
Вместо секций прямолинейных направляющих может быть установлена радиальная направляющая с возможностью перископического изменения длины вдоль радиуса, образованного азимутальной направляющей, прикрепленная первым концом к основанию угломестной направляющей, а вторым концом к колесной опоре, причем второй измерительный зонд установлен на нем неподвижно.
Кроме того, в каждом из них может быть введен третий измерительный зонд, который также закреплен на вертикальной углооместной направляющей с возможностью перемещения.
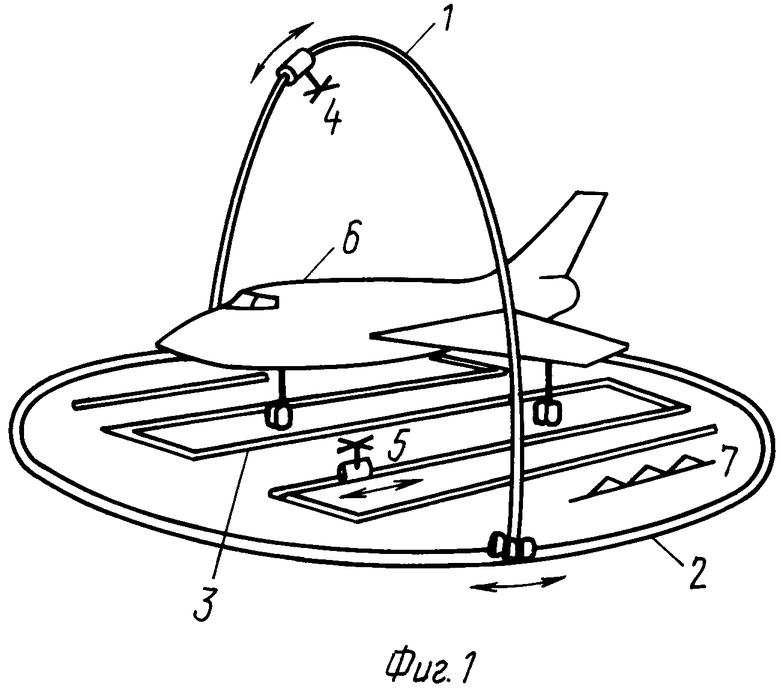
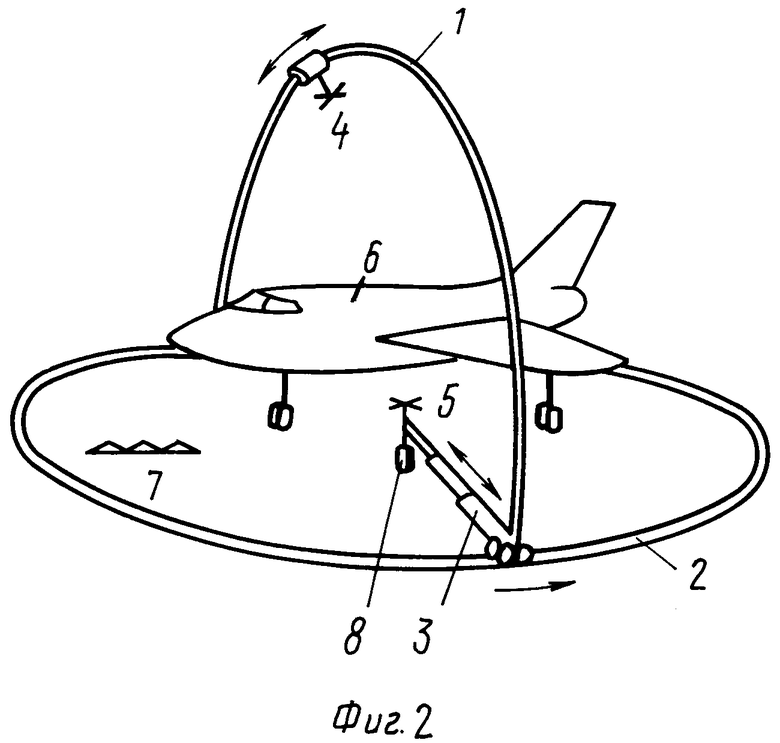
На фиг. 1 представлена функциональная схема предлагаемого стенда; на фиг.2 - то же, вариант исполнения; на фиг.3 - то же, вариант исполнения.
Стенд содержит вертикально установленную угломестную направляющую 1, горизонтально установленную азимутальную направляющую 2, секции прямолинейных направляющих 3, первый измерительный зонд 4, второй измерительный зонд 5, испытуемый объект 6 и радиопоглощающий материал (РПМ) 7.
Стенд работает следующим образом. Вертикальная угломестная направляющая 1, выполненная в виде полуокружности, установлена двумя основаниями в некоторой позиции, принимаемой за начальную, на горизонтально расположенной азимутальной направляющей 2. Первый измерительный зонд 4 начинает пробег по направляющей 1, описывая полуокружность и измеряя значения амплитуды и фазы поля в заданных дискретных точках в ближней зоне вокруг объекта 6. Электрическая ось зонда 4 направлена на центр синтезируемой сферической поверхности. Далее направляющая 1 совершает азимутальный поворот по направляющим 2 на заданный дискретный угол и пробег измерительного зонда 4 повторяется в обратном направлении. Процесс повторяется до достижения направляющей 1 положения, соответствующего ее полуобороту по азимуту, считая от начальной точки измерения. В этой позиции завершается синтез матрицы измеряемых значений амплитудно-фазового распределения (АФР) поля в ближней зоне вокруг объекта 6 по сферической поверхности. Матрица может быть подвергнута соответствующей математической обработке для определения характеристик поля в дальней зоне объекта.
Одновременно с измерениями в верхней полусфере производится также измерение поля в нижнем полупространстве объекта с использованием методики сканирования по плоской поверхности в его ближней зоне. Для этого второй измерительный зонд 5 совершает пробег по секциям прямолинейных направляющих 3, измеряя значения АФР поля в заданных дискретных точках синтезируеой прямоугольной планарной матрицы измерений. Далее матрица может быть подвергнута соответствующей математической обработке для определения характеристик поля в дальней зоне объекта. Электрическая ось зонда 5 направлена вертикально вверх. Для уменьшения влияния переотражений поверхность под объектом заставляется РПМ.
В отличие от фиг.1 стенд содержит радиальную перископическую направляющую 3 и колесную опору 8.
Стенд (фиг.2) работает следующим образом.
Параллельно с передвижением первого измерительного зонда 4 по вертикальной угломестной направляющей 1 происходит выдвижение (вдвижение) радиальной перископической направляющей 3. Она закреплена первым (базовым) концом к одной из опор вертикальной угломестной направляющей 1, а вторым (переменным) концом прикреплена к колесной опоре 8. Второй измерительный зонд 5, электрическая ось которого направлена вертикально вверх, закреплен на вором конце перископической направляющей 3 и в процессе радиального перемещения зонда 5 от центра окружности, образованной азимутальной направляющей 2 (или обратно), происходит измерение поля в заданных дискретных точках вдоль радиуса. Далее вертикальная угломестная направляющая 1, а вместе с ней и прикрепленная к ней радиальная направляющая 3 поворачиваются на свой заданный дискретный азимутальный угол и пробег измерительных зондов 4 и 5 повторяется в обратном направлении. Процесс повторяется до достижения положения направляющей 1 соответствующего полуобороту по азимуту, считая от начальной точки измерения. В этой позиции завершается как синтез верхней полусферической измерительной матрицы, так и синтез плоско-полярной измерительной матрицы, соответствующей нижнему полупространству в ближней зоне объекта 6. Обработка данных по плоско-полярной матрице проводится соответствующим математическим обеспечением.
Стенд (фиг. 3) содержит дополнительный третий измерительный зонд 9, закрепленный также на вертикальной угломестной направляющей 1 с возможностью перемещения по ней.
Стенд работает следующим образом.
В отличие от работы стенда (см.фиг.2) общая длина сканирования по вертикальной угломестной направляющей 1 условно разделяется на два одинаковых сектора (0о-90о и 91о-180о по углу места). Первый измерительный зонд 4 совершает свои реверсивные пробеги только в одном из секторов направляющей 1, а третий измерительный зонд 9 - только во втором секторе. Перемещения обоих зондов 4 и 9 и соответствующие измерения АФР поля происходят параллельно во времени, что сокращает время, затрачиваемое на сканирование верхнего сферического полупространства и делает его соизмеримым со временем, затрачиваемым на сканирование нижнего планарного полупространства.
Таким образом, используя различные методики определения характеристик объекта в дальней зоне по результатам измерения АФР на сферической и планарной поверхностях в его ближней зоне, либо сферической и плоскополярной, можно составить полную картину ЭМО вокруг объекта с учетом влияния проводящей поверхности объекта. При этом применение параллельного во времени сканирования дает большой выигрыш во времени. Предлагаемый стенд может быть смонтирован непосредственно на аэродромах, на месте стоянки ЛА или в оборудованных РПМ ангарах, и его обычных условиях, т.е. выполняя условия неразрушающего контроля при измерениях. При этом радиоизмерительная аппаратура может быть размещена в передвижной лаборатории.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения характеристик поля антенны | 1990 |
|
SU1800402A1 |
| Стенд для измерения амплитудно-фазового распределения электромагнитного поля в ближней зоне антенны | 1985 |
|
SU1350628A1 |
| Способ комплексной калибровки пеленгатора - корреляционного интерферометра на мобильном носителе | 2016 |
|
RU2640354C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ФИЗИЧЕСКИХ ПОЛЕЙ ВЕРХНЕЙ ПОЛУСФЕРЫ МОРСКОГО ОБЪЕКТА | 2011 |
|
RU2481601C2 |
| Способ определения диаграммы направленности антенны | 1985 |
|
SU1357880A1 |
| Способ измерения характеристик направленности излучающей гидроакустической антенны | 2023 |
|
RU2817561C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2285933C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2285932C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2282866C1 |
| СПОСОБ ИСПЫТАНИЙ СРЕДСТВ СОЗДАНИЯ ПОМЕХ БОРТОВЫМ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 2020 |
|
RU2748482C1 |

Использование: в технике антенных измерений бортовых антенн летательных аппаратов, для прогнозирования электромагнитной совместимости бортовых радиоэлектронных средств и для определения электромагнитной обстановки вокруг полномасштабного объекта с учетом влияния его проводящей поверхности. Сущность изобретения: азимутальная направляющая 2 выполнена в форме кольца, а угломестная направляющая 1 - в форме полукольца и установлена на азимутальную направляющую 2 с возможностью вращения по азимуту. Первый и третий зонды 4, 9 установлены с возможностью перемещения на угломестной направляющей 1. В плоскости азимутальной направляющей 2 установлены секции прямоугольной направляющей 3, на которой установлен с возможностью перемещения второй зонд 5. Прямолинейная направляющая 3 может быть выполнена в виде телескопической штанги, а второй зонд 5 установлен на ней неподвижно. 2 з.п. ф-лы, 3 ил.