Изобретение относится к области испытаний радиоэлектронных средств (РЭС). Изобретение может быть использовано при испытаниях и оценке эффективности систем подавления бортовых радиолокационных средств.
Наиболее близким по технической сущности к заявляемому изобретению является способ испытаний радиолокационных станций систем противовоздушной обороны и средств создания помех бортовым радиолокационным станциям (БРЛС), основанный на применении летательных аппаратов (ЛА): летающих лабораторий с размещенными на них имитаторами РЭС, беспилотных летательных аппаратах, авиационных мишенях и т.п. [В. Куценко, А. Кулаков, А. Грешилов Щит России. Системы противоракетной обороны. М.: Изд-во МГТУ им. Н. Э. Баумана, 2009, 504. С. 232-235]. Недостатками способа являются: зависимость возможности выполнения полетов ЛА от метеорологической обстановки; ограничения для полетов в запретных зонах; материальные затраты, связанные с обеспечением горючесмазочными материалами, расходом летного ресурса авиационной техники и привлечением большого количества обслуживающего персонала.
Данный способ принят в качестве прототипа.
Техническим результатом изобретения является устранение недостатков указанных выше.
Указанный технический результат достигается тем, что в известном способе испытаний средств создания помех БРЛС, основанном на применении ЛА, излучении сигналов БРЛС имитатором, приеме сигналов БРЛС объектом испытаний, измерении направления прихода излучения, построении траектории ЛА - носителя БРЛС, создании помех, регистрации и обработке результатов испытаний, согласно изобретению, сигналы БРЛС имитируют имитатором, установленным на земле на заданном расстоянии от объекта испытаний, с возможностью перемещения по вертикали по заданной программе, объект испытаний вращают вокруг своей вертикальной оси в азимутальной плоскости по заданной программе.
Сущность изобретения заключается в том, что сигналы БРЛС имитируют имитатором, установленным на земле на заданном расстоянии от объекта испытаний, с возможностью перемещения по вертикали по заданной программе, объект испытаний вращают вокруг своей вертикальной оси в азимутальной плоскости по заданной программе.
Сущность изобретения поясняется на фигуге.
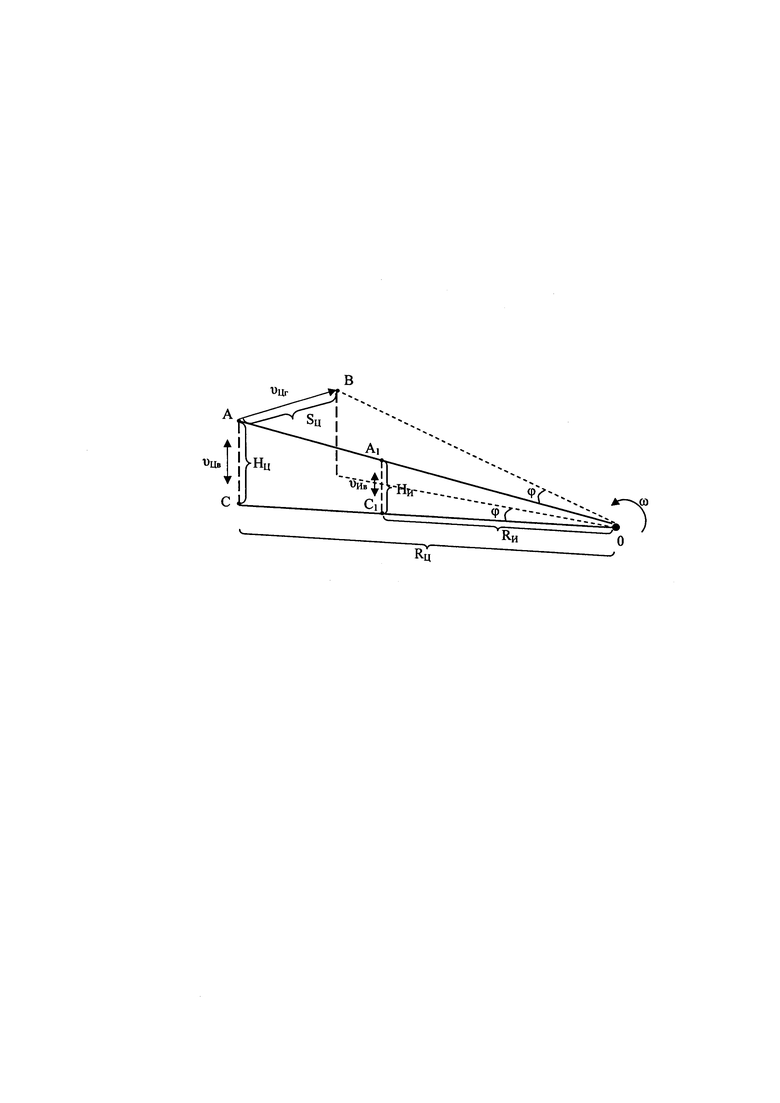
На фигуре обозначены:
0 - точка размещения объекта испытаний;
НЦ - высота полета ЛА - носителя БРЛС в угломестной плоскости при натурном эксперименте;
НИ - высота размещения имитатора БРЛС;
SЦ - величина перемещения ЛА - носителя БРЛС в азимутальной плоскости;
RЦ - расстояние от объекта испытаний до ЛА - носителя БРЛС;
RИ- расстояние от объекта испытаний до имитатора;
υЦв, υЦг - скорости движения ЛА в вертикальной и горизонтальной плоскостях соответственно;
ω - угловая скорость вращения объекта испытаний;
ϕ - величина изменения углового азимутального положения ЛА - носителя БРЛС, относительно объекта испытаний.
В известном способе имитатор БРЛС размещается на борту ЛА, который совершает полет по заданной траектории. Имитатор БРЛС излучает сигнал, который принимается объектом испытаний. По принятому сигналу измеряют направление прихода излучения, строят траекторию ЛА и создают помехи, регистрируют и обрабатывают результаты испытаний.
Применение в процессе испытаний ЛА с размещенным на борту имитатором БРЛС требует:
- благоприятной метеорологической обстановки в месте проведения испытаний, необходимой для выполнения полетов ЛА, отсутствие которой затрудняет планирование проведения испытаний, неизбежно увеличивает их сроки, а так же приводит к дополнительным расходам при простое экипажей ЛА и обслуживающего персонала;
- учета запретных зон для полетов ЛА, при их планировании. Наличие ограничений на полеты ЛА не позволяет в полном объеме воспроизвести требуемые условия испытаний, что приведет к снижению достоверности их результатов;
- значительных затрат на применение авиационной техники при испытаниях включающих расходы на обеспечение горюче-смазочными материалами, содержание, обслуживание и ремонт ЛА, содержание обслуживающего персонала, что в итоге приводит к увеличению конечной стоимости испытываемого образца.
Поэтому, согласно изобретению, имитатор сигнала бортовой радиолокационной станции устанавливают на земле на заданном расстоянии от объекта испытаний, с возможностью перемещения по вертикали по заданной программе, объект испытаний вращают вокруг своей вертикальной оси в азимутальной плоскости по заданной программе.
Управление перемещением имитатора относительно объекта испытаний осуществляется программой, которая основана на пересчете параметров движения ЛА - носителя БРЛС в местоположение имитатора относительно объекта испытаний и выдаче соответствующих команд. В качестве исходных данных используются НЦ, SЦ,, RЦ,, υЦв, υЦг, которые выбираются в соответствии с условиями испытаний (параметрами движения ЛА - носителей БРЛС), например, описанных в [Радзиевский В.Г., Неволин А.В. Модели и методики оценки эффективности радиоподавления средств радиоэлектронной разведки и поражения авиационно-космических систем высокоточного оружия в условиях информационного конфликта / Монография. - Воронеж: ВУНЦ ВВС «ВВА», 2016, 234. С. 9-23].
Высота размещения имитатора БРЛС определяется из подобия треугольников ΔАОС ~ ΔA1OC1. Для подобных треугольников справедливо отношение  , из которого следует, что высота размещения имитатора определяется выражением:
, из которого следует, что высота размещения имитатора определяется выражением:

где НИ - высота размещения имитатора БРЛС;
НЦ - высота полета ЛА - носителя БРЛС в угломестной плоскости при натурном эксперименте;
RЦ - расстояние от объекта испытаний до ЛА - носителя БРЛС;
RИ - расстояние от объекта испытаний до имитатора;
Перемещение ЛА - носителя БРЛС в азимутальной плоскости SЦ и расстояние от объекта испытаний до ЛА - носителя БРЛС RЦ, скорости движения ЛА в вертикальной и горизонтальной плоскостях υЦв, υЦг задаются условиями испытаний.
Заданное расстояние от объекта испытаний до имитатора RИ должно определяться условием обеспечения дальней зоны антенны объекта испытаний, описанного в [Современная радиолокация (анализ, расчет и проектирование систем) пер. с англ. под ред. Кобзарева Ю.Б., М.: «Советское радио», 1969, 703. С. 374-377] и определяемого выражением  , где D - максимальный раскрыв антенны объекта испытаний, а λmin - минимальная длина волны излучения, на которой должны проводиться измерения.
, где D - максимальный раскрыв антенны объекта испытаний, а λmin - минимальная длина волны излучения, на которой должны проводиться измерения.
Скорость перемещения имитатора в вертикальной плоскости определяется в соответствии с выражением:

где RЦ - расстояние от объекта испытаний до ЛА - носителя БРЛС;
RИ - расстояние от объекта испытаний до имитатора;
υЦв - скорость движения ЛА - носителя БРЛС в вертикальной плоскости;
υЦг - скорость движения ЛА - носителя БРЛС в горизонтальной плоскости.
Скорость вращения объекта испытаний в азимутальной плоскости относительно имитатора определяется в соответствии с выражением:

где  величина изменения углового азимутального положения при полете ЛА - носителя БРЛС, относительно объекта испытаний;
величина изменения углового азимутального положения при полете ЛА - носителя БРЛС, относительно объекта испытаний;
SЦ - величина перемещения ЛА - носителя БРЛС в азимутальной плоскости;
RЦ - расстояние от объекта испытаний до ЛА - носителя БРЛС;
t - время, затрачиваемое на изменение углового азимутального положения ϕ при полете ЛА - носителя БРЛС, относительно объекта испытаний.
При этом направление вращения объекта испытаний в азимутальной плоскости противоположно направлению движения имитируемого объекта.
Технический результат предлагаемого способа заключается в упрощении технической реализации испытательных экспериментов путем замены летного эксперимента - наземным.
Технический результат достигается тем, что источник имитирующий сигнал БРЛС размещенный на земле, перемещается по вертикали - в угломестной плоскости, обеспечивает имитацию изменения высоты полета летательного аппарата, вращение объекта испытаний в азимутальной плоскости, относительно имитируемого сигнала БРЛС, осуществляет имитацию горизонтального перемещения ЛА - носителя БРЛС относительно объекта испытаний, аналогично известному способу. В [Справочник по радиолокации. Под ред. М. Сколника. Нью-Йорк, 1970: Пер. с англ. Под общей ред. К.Н. Трофимова; т. 3. Радиолокационные устройства и системы. Под ред. А.С. Виницкого. - М: «Советское радио», 1978, 527. С. 473-475] показана сходимость результатов испытаний.
Высота и скорость перемещения имитатора БРЛС в вертикальной плоскости, скорость вращения объекта испытаний рассчитываются в соответствии с выражениями (1) - (3) соответственно. Это позволяет воспроизвести параметры движения ЛА - носителя БРЛС в наземных условиях, что обеспечивает идентичность результатов испытаний по известному и предлагаемому способам и достижение указанного в изобретении технического результата. Исходными данными для расчетов параметров перемещения имитатора БРЛС и вращения объекта испытаний являются параметры движения ЛА - носителей БРЛС: НЦ, SЦ, RЦ, RИ, υЦв, υЦг.
Применение предложенного способа позволяет существенно снизить временные и материальные затраты при проведении испытаний и оценке эффективности систем подавления бортовых радиолокационных средств.
Способ может быть реализован с применением известных технических устройств. Перемещение имитатора сигнала БРЛС по вертикали - в угломестной плоскости может быть осуществлено, например, с помощью описанного в [Страхов А.Ф. Автоматизированные антенные измерения, М.: «Радио и связь», 1985, 136. С. 125-127] линейно-координатного устройства, а возможность вращения объекта испытаний в азимутальной плоскости может быть осуществлена, с помощью описанного в [Страхов А.Ф. Автоматизированные антенные измерения, М.: «Радио и связь», 1985, 136. С. 127-133] координатно-поворотного устройства. Возможность управления перемещениями линейно-координатного и координатно-поворотного устройств может быть реализовано, например, с помощью описанного в [Фолкенберри Л.М. Справочное пособие по ремонту электрических и электронных систем: Пер. с англ. - М.: Энергоатомиздат, 1989. - 416. С. 382-387] устройства управления, а выдача сигналов обратной связи может быть осуществлена, например, с помощью описанных в [Фолкенберри Л.М. Справочное пособие по ремонту электрических и электронных систем: Пер. с англ. - М.: Энергоатомиздат, 1989. - 416. С. 393] датчиков.
Изобретение относится к области испытаний радиоэлектронных средств. Изобретение может быть использовано при испытаниях и оценке эффективности систем подавления бортовых радиолокационных средств. Способ испытаний средств создания помех бортовым радиолокационным станциям (БРЛС) заключается в том, что сигналы БРЛС имитируют имитатором, установленным на земле на заданном расстоянии от объекта испытаний, с возможностью перемещения по вертикали по заданной программе, а объект испытаний вращают вокруг своей вертикальной оси в азимутальной плоскости по заданной программе. Упрощается техническая реализация испытательных экспериментов. 1 ил.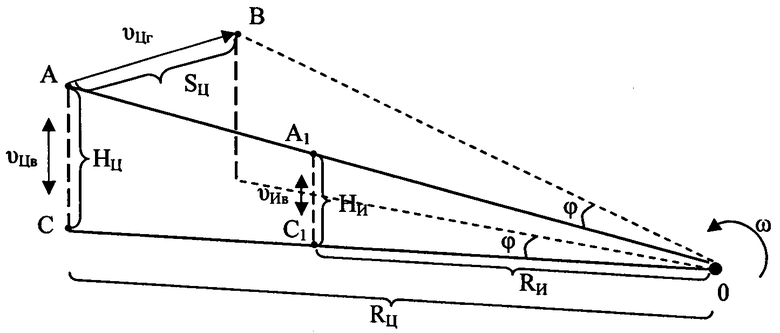
Способ испытаний средств создания помех бортовым радиолокационным станциям, основанный на излучении сигналов бортовых радиолокационных станций имитатором, приеме сигналов бортовых радиолокационных станций объектом испытаний, измерении направления прихода излучения, построении траектории носителя бортовой радиолокационной станции, создании помех, регистрации и обработке результатов испытаний, отличающийся тем, что сигналы бортовой радиолокационной станции имитируют имитатором, установленным на земле на заданном расстоянии от объекта испытаний, с возможностью перемещения по вертикали по заданной программе, объект испытаний вращают вокруг своей вертикальной оси в азимутальной плоскости по заданной программе.
| "Системы противоракетной обороны", В | |||
| Куценко, А | |||
| Кулаков, А | |||
| Грешилов, Щит России | |||
| М.: Изд-во МГТУ им | |||
| Н | |||
| Э | |||
| Баумана, 2009, всего 504 с., с | |||
| Крутильно-намоточный аппарат | 1922 |
|
SU232A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841104A1 |
| ИМИТАТОР ДВИЖУЩЕЙСЯ ЦЕЛИ | 1984 |
|
SU1840999A1 |
| US 10578715 B2, 03.03.2020. | |||

