Изобретение относится к управлению электрооборудованием дизель-электрических транспортных средств.
Силовая передача для тягового транспортного средства, такого как большой буксирующий грузовик, в типичном случае включает управляемые силовой установкой электрические генерирующие средства для подачи электрического питания на электрическую нагрузку, содержащую пару мощных электрических тяговых двигателей, соединенных в качестве привода с парой колес на противоположных сторонах транспортного средства. Силовая установка обычно является дизельным двигателем, генерирующие средства включают большой генератор переменного тока (альтернатор), подключенный к мощному мостовому выпрямителю, а тяговые двигатели представляют собой реверсивные электрические двигатели постоянного тока с регулируемой скоростью. Водитель транспортного средства управляет скоростью транспортного средства и направлением движения, т.е. вперед или назад, посредством манипулирования педалью управления скоростью и селекторным переключателем вперед-назад. Эта педаль управления скоростью приспособлена для управления скоростью и изменяет величину напряжения, приложенного к тяговым двигателям. В движении или "моторинговом" режиме работы число оборотов двигателей и, следовательно, линейная скорость транспортного средства зависят как от величины выходного напpяжения альтернатора, так и от напряженности поля двигателя. Обычно используются двигатели с независимым возбуждением, в которых возбуждением поля управляют так, что величина тока возбуждения двигателя является предварительно определенной функцией величины тока в обмотке ротора. Посредством этого достигаются желаемые характеристики двигателей с последовательным возбуждением.
Наиболее близким к предлагаемому является способ регулирования мощности тягового электродвигателя независимого возбуждения колесного транспортного средства, в котором измеряют напряжение, подводимое к якорю электродвигателя от генератора переменного тока после его выпрямления, и протекающий через якорь ток, по сигналам обратной связи воздействием на возбуждение генератора регулируют мощность в функции скорости электродвигателя с сохранением ее постоянства при токах якоря, меньших максимально допустимого уровня, и скоростях, не превышающих значение, соответствующее окончанию естественной механической характеристики.
Наиболее близким к предлагаемому является устройство для регулирования мощности тягового электродвигателя независимого возбуждения колесного транспортного средства, содержащее датчики напряжения и тока якоря электродвигателя, узел управления мощностью, входы которого соединены с выходами датчиков напряжения и тока якоря, а выход - с цепью возбуждения генератора переменного тока, подключенного к электродвигателю через выпрямитель.
В моторинговом режиме работы силовой передачи тягового транспортного средства скорость двигателя может изменяться в широком диапазоне. В нижней части диапазона допустимой скорости противоЭДС каждого тягового двигателя будет относительно низкой, ток в обмотке ротора - высоким, следовательно, двигатели могут развить большой момент, необходимый, когда транспортное средство, везущее груз, трогается с места или поднимается по крутому склону. При высокой скорости двигателя, что выполняется, когда груженое транспортное средство движется по практически ровной дороге или когда транспортное средство порожнее, противоЭДС будет высокой, а ток нагрузки и, следовательно, момент - относительно низким. По всему диапазону скорости величина напряжения, которое прикладывает альтернатор через мостовой выпрямитель к обмоткам роторов двигателей, зависит от скорости двигателя, напряженности поля альтернатора и величины тока, который альтернатор подает на обмотки ротора, тогда как величина тока нагрузки зависит от требуемого момента двигателя.
Силовая передача характеристически имеет три различные рабочие области для любой данной скорости двигателя: область ограничения тока на относительно низких скоростях, т.е. когда величина тока нагрузки является большой; область постоянной мощности, где скорость двигателя изменяется на промежуточном участке полного диапазона допустимых колебаний скорости; область ограничения напряжения на скоростях выше промежуточной области и ниже максимальной допустимой скорости, т. е. когда величина тока нагрузки является низкой.
Многие взаимозависимые переменные вовлечены в определение размеров различных компонентов силовой передачи большого буксирующего грузовика. Из-за веса и пространственных ограничений на практике не используется альтернатор, достаточно большой, чтобы подавать на тяговые двигатели по всему диапазону допустимых скоростей двигателя в моторинговом режиме работы 100% максимальной номинальной мощности, которую двигатель способен производить. Такая силовая передача в типичном случае управляется для 100% использования мощности в течение периода, пока выходное напряжение альтернатора не превышает определенной величины, которая ниже, чем максимально допустимое напряжение альтернатора, и для менее чем 100% использования мощности в противном случае. Как только напряжение альтернатора становится равным этой величине, скорость каждого тягового двигателя будет равна определенной скорости "угловой точки". Скорость "угловой точки" является наивысшей скоростью двигателя, при которой альтернатор может безопасно питать двигатели количеством электрической энергии, эквивалентным максимальной номинальной механической мощности двигателя без присущих потерь. Когда скорость двигателя превышает скорость "угловой точки", альтернатор не может выдавать такую эквивалентную скорость без увеличения тока в его обмотках возбуждения выше максимального уровня длительного тока возбуждения этой машины. Скорость "угловой точки" ниже, чем максимально допустимая скорость двигателя, которая определяется физическими или структурными ограничениями в тяговых двигателях. Физические размеры альтернатора и двигателей в основном пропорциональны произведению максимальной номинальной мощности двигателя на диапазон скорости двигателя, в котором максимальная мощность может длительно использоваться без превышения предварительно определенных рабочих ограничений альтернатора и двигателей. Для любой данной скорости "угловой точки" и максимально допустимой скорости показатель КПД для силовой передачи составляет процентное отношение максимальной номинальной мощности, достижимой при максимальной скорости тяговых двигателей.
На фиг. 1 показана типовая сравнительная характеристика моментных скоростей пары последовательно соединенных двигателей, к которым приложено выпрямленное напряжение альтернатора. Максимально допустимая скорость для отдельного двигателя, определяемая механическими конструкторскими ограничениями, составляет около 2320 оборотов оси в минуту. Поскольку скорость двигателя изменяется в промежуточной части полного диапазона скорости, т.е. от около 300 до около 1300 об/мин, силовая передача работает в области постоянной мощности для поддержания мощности двигателя при желаемом постоянном ограничении, которое выбирается равным максимальной номинальной мощности двигателя, управляемого альтернатором. Это иллюстрируется на фиг. 1 сплошной линией кривой между точками О и А (мощность пропорциональна произведению скорости и момента вращения). Для сохранения такой же мощности на высоких скоростях двигателя ток возбуждения альтернатора должен превышать его максимальный длительный уровень. Штрихпунктирная линия от точки А до точки В иллюстрирует продолжение кривой от т.О до т.А постоянной мощности для скоростей двигателя между скоростью "угловой точки" и максимально допустимой скоростью. Однако на практике рабочая область ограничения напряжения становится эффективной, когда скорость двигателя увеличивается выше угловой точки А и мощность двигателя падает по кривой постоянной мощности. Это иллюстрируется сплошной кривой между точками А и С для известного построения силовой передачи, в которой величина тока возбуждения альтернатора уменьшается от его максимального уровня для поддержания выходного напряжения альтернатора на уровне, достигнутом, когда скорость двигателя увеличилась до угловой точки А. Вертикальная разность между сплошной линией от точки А до точки С и штрихпунктирной линией от точки А до точки В представляет нежелательное большое уменьшение движущей силы. Чтобы минимизировать уменьшение мощности, когда скорость двигателя выше скорости "угловой точки", и использовать высокое процентное соотношение максимальной номинальной мощности на максимально допустимой скорости двигателя, характеристика между этими двумя линиями, как иллюстрируется на фиг. 1 штриховой линией между точками А и D, будет желательна, если она могла бы быть достигнута без превышения током возбуждения альтернатора его максимального длительного уровня, без увеличения тока в обмотке ротора двигателя выше предварительно определенного предела коммутации, который пропорционален произведению скорости двигателя и тока в обмотке ротора, и без нарушения или предела максимального выходного тока, или предела минимального возбуждения двигателей, ниже которых коммутация опускается до неприемлемого уровня. Эти ограничения определяют высокоскоростной диапазон работы силовой передачи обычного тягового транспортного средства. Мощность, подаваемая на тяговые двигатели при максимальной скорости двигателя, должна быть оптимизирована, если выходное напряжение альтернатора достигло его максимального предела, а ток обмотки ротора двигателя стал равным его пределу коммутации совместно со скоростью двигателя, достигающей максимальной допустимой скорости. Чем выше мощность, подаваемая на двигатели при максимальной скорости, тем больше степень крутизны, которую нагруженное транспортное средство может преодолевать на соответствующей высокой скорости, и, следовательно, тем больше его производительность.
Целью изобретения является создание способа и устройства регулирования мощности тягового электродвигателя независимого возбуждения колесного транспортного средства, обеспечивающих минимизацию уменьшения движущей силы при работе на высокой скорости без увеличения стоимости силовой передачи.
Для этого в способе регулирования мощности тягового электродвигателя независимого возбуждения колесного транспортного средства измеряют напряжение, подводимое к якорю электродвигателя от управляемого источника электрической энергии, и протекающий через якорь ток, по сигналам обратной связи воздействием на указанный источник регулируют мощность в функции скорости электродвигателя с сохранением ее постоянства при токах якоря, меньших максимально допустимого уровня, и скоростях, не превышающих значение, соответствующее окончанию естественной механической характеристики, в диапазоне токов якоря электродвигателя ниже предварительно заданного порогового значения предельного напряжения якоря обратно пропорционально его току, не превышая максимально допустимого уровня, при этом увеличивают значение предельного напряжения вычитанием из сигнала обратной связи по напряжению сигнала компенсации, пропорционального разности между текущим уровнем тока якоря и его пороговым значением.
Пороговое значение тока якоря электродвигателя выбирают соответствующим значению скорости в конце естественной механической характеристики, а максимально допустимый уровень предельного напряжения якоря электродвигателя выбирают соответствующим минимально допустимому уровню тока коммутации на максимально допустимой скорости.
В устройстве узел управления мощностью снабжен органом изменения значения предельного напряжения якоря обратно пропорционально его току при токах, меньших предварительно заданного порогового значения.
В устройство введены датчик тока возбуждения электродвигателя и узел управления возбуждением последнего, соединенный входами с выходами датчиков токов возбуждения и якоря, а выходом с управляющим входом источника возбуждения электродвигателя, узел управления мощностью снабжен формирователем сигнала компенсации, пропорционального превышению порогового значения над текущим значением тока якоря электродвигателя, и блоком вычитания, входы которого соединены с выходами датчика напряжения якоря и формирователя, а выход - с исполнительным органом, формирователь сигнала компенсации включает блок предотвращения увеличения сигнала компенсации выше разности между начальным и максимально допустимым значениями предельного напряжения якоря электродвигателя, имеет блок формирования первого уровня, изменяемого при токах якоря электродвигателя, меньших порогового значения, блок формирования второго уровня, соответствующего максимально допустимому значению предельного напряжения якоря, и соединенный с ними селектор минимального из двух уpовней, содержит блок установки нулевого уровня сигнала компенсации при токах якоря электродвигателя, больших порогового значения, при этом один из входов формирователя сигнала компенсации соединен с соответствующим выходом органа изменения значения предельного напряжения якоря электродвигателя.
Таким образом, силовая передача в типичном случае включает электрический тяговый двигатель с регулируемой скоростью, в частности двигатель с независимым возбуждением, механически соединенный в отношении управления с колесом транспортного средства, управляемый источник электрической энергии, в частности управляемый дизельным двигателем альтернатор и неуправляемый мостовой выпрямитель, электрически соединенный в отношении подключения к источнику питания с роторными обмотками двигателя, и управляемый источник тока возбуждения, например мостовой выпрямитель с фазовым управлением, запитываемый от вспомогательной обмотки альтернатора, для обмоток возбуждения двигателя. Предусмотрены средства для получения сигналов обратной связи напряжения питания, тока в обмотке ротора двигателя и тока возбуждения двигателя. Силовая передача содержит управляющие средства, чувствительные к напряжению и сигналам обратной связи тока обмотки ротора для управления источником питания так, чтобы желаемое постоянное количество энергии поступало на тяговый двигатель, когда скорость двигателя изменяется в течение периода и не превышает предварительно определенной скорости "угловой точки", а величина тока нагрузки меньше, чем требуемый предел тока. Когда скорость двигателя превышает скорость "угловой точки", средства управления питанием обеспечивают регулирование, чтобы предотвратить увеличение значения напряжения источника питания больше, чем требуемый предел напряжения, следовательно, уменьшают количество энергии, которое источник питания подает на двигатель на верхнем участке диапазона изменений допустимой скорости. Кроме того, силовая передача включает средства управления возбуждением, чувствительные к сигналам обратной связи тока возбуждения и обмотки ротора и обеспечивающие управление источником тока возбуждения так, чтобы ток возбуждения двигателя изменялся как предварительно определенная функция тока обмотки ротора.
В соответствии с настоящим изобретением указанный предел напряжения не является фиксированным значением, но изменяется как функция величины тока обмотки ротора двигателя. Требуемый предел напряжения имеет предварительно определенное начальное значение, которое равно величине напряжения питания, когда двигатель запитывается максимальной номинальной мощностью, а его скорость равна скорости "угловой точки". В этой точке ток обмотки ротора имеет предварительно определенную пороговую величину. Когда скорость двигателя увеличивается от "угловой точки", ток обмотки ротора уменьшается от упомянутого порогового значения до нижнего значения, определяемого пределом коммутации двигателя на максимальной допустимой скорости двигателя, и предел требуемого напряжения увеличивается от его начального значения. Величина, на которую предел напряжения увеличивается сверх начального значения вплоть до предварительно определенной максимальной величины, пропорциональна величине уменьшения тока обмотки ротора ниже первой указанной пороговой величины, посредством чего увеличение предела напряжения достигается без перегрева источника питания, т.е. без превышения термического предела обмоток возбуждения альтернатора. В результате увеличения предела требуемого напряжения указанным способом уменьшение мощности, подаваемой на двигатель на высокой скорости, оказывается значительно меньшим, чем было бы, если бы предел напряжения сохранялся бы неизменным на начальной величине. Чтобы достигнуть максимальной скорости двигателя вместе с упомянутой нижней величиной тока обмотки ротора посредством оптимизации использования мощности на максимальной скорости двигателя, напряженность поля двигателя соответственно уменьшается. Для этой цели средства управления полем двигателя программируются так, что ток обмотки ротора уменьшается ниже первой упомянутой пороговой величины, указывающей, что скорость двигателя увеличивается выше скорости "угловой точки", отношение тока возбуждения к величинам тока нагрузки прогрессивно уменьшается, посредством чего напряженность поля двигателя становится слабее, когда ток обмотки ротора равен упомянутой нижней величине.
На фиг. 1 представлена типовая сравнительная характеристика моментных скоростей для пары последовательно соединенных тяговых двигателей постоянного тока; на фиг. 2 - функциональная схема типовой силовой передачи с двумя двигателями для транспортного средства на электрической тяге; на фиг. 3 - схема устройств управления питанием к блоку на фиг. 2; на фиг. 4 - типовая сравнительная характеристика тока нагрузки альтернатора и напряжения нагрузки альтернатора как функции тока возбуждения альтернатора с наложенной вольтамперной кривой альтернатора для работы с постоянной мощностью при выходе с максимальной номинальной мощностью; на фиг. 5 - типовая нагрузочная характеристика в области насыщения, построенная как функция тока нагрузки от отношения противоЭДС к числу оборотов в минутах для электрического тягового двигателя с независимым возбуждением; на фиг. 6 - одна форма схемы компенсации переменного напряжения ("vari - volt"), показанной на фиг. 3.
Силовая передача, изображенная на фиг. 2, предназначена для физического размещения на самодвижущемся тяговом транспортном средстве (не показано), таком как большой немагистральный буксирующий грузовик. Управляемый оператором регулятор, например ножная педаль (не показана), приспособлен для управления скоростью вращения (числом оборотов в минуту) первичного движителя, который может быть, например, дизельным двигателем 11. Предполагается, что оператор требует максимальную номинальную скорость двигателя. Выходной вал 12 двигателя управляемо соединен с ротором генератора (альтернатора) 13 электрической энергии переменного тока, который имеет набор из трехфазных роторных или главных обмоток (не показаны), пары вспомогательных (третьих) обмоток 14 и 15 и обмоток 16 возбуждения. Трехфазное в основном синусоидальное переменное напряжение, которое генерируется в главных обмотках альтернатора 13, преобразуется в постоянное напряжение посредством неуправляемого двухполупериодного мостового выпрямителя 17. Управляемый дизельным двигателем 11 альтернатор 13 служит в качестве источника питания для пары тяговых электродвигателей М1 и М2 с регулируемой скоростью, чьи соответствующие роторные обмотки соединены через соединитель Р и линии 18-20 последовательно друг с другом между выходными клеммами мостового выпрямителя 17. Двигатели М1 и М2 имеют обмотки F1 и F2 возбуждения с независимым возбуждением соответственно. Роторы этих двигателей соединены в отношении управления через соответствующую уменьшающую скорость зубчатую передачу, чтобы разделить колеса (не показаны) на противоположных сторонах транспортного средства. Посредством соответствующего управления скоростью двигателя 11 и возбуждением альтернатора 13 и полей электродвигателей транспортное средство может быть приведено в движение (моторинг) или динамически заторможено (электрическое торможение) с помощью его двигателей вперед или в обратном направлении.
В течение моторингового режима работы двигатели М1 и М2 вращаются со скоростью, которая в первую очередь зависит от величины тока возбуждения в их обмотках возбуждения F1 и F2 и величины напряжения, приложенного к соответствующим роторным обмоткам. Последняя величина является функцией скорости, на которой альтернатор 13 приводится к действие, величины тока нагрузки и величины тока возбуждения в обмотке 16 возбуждения альтернатора. Пока скорость двигателя постоянна, средняя величина выпрямленного выходного напряжения альтернатора 13 изменяется управляемым током возбуждения альтернатора. Ток возбуждения альтернатора 13 подается вспомогательной обмоткой 14 через однофазовый двухполупериодный с управляемой фазой мостовой выпрямитель 22. Его величина зависит от распределения по времени периодических запускающих сигналов, которые подаются на выпрямитель 22 по линиям 23 и 24 от обычного генератора 25 стробирующих импульсов, который соединен с входной линией 26 узла (средств) 27 управления мощностью.
Средства 27 управления мощностью принимают первый входной сигнал, представляющий напряжение VM на выходе мостового выпрямителя 17, второй входной сигнал, представляющий ток в электрической нагрузке, подключенной к этой мостовой схеме, т. е. ток IА в обмотках ротора двигателей М1 и М2, третий входной сигнал (от клеммы 21), который изменяется совместно со скоростью VS вращения двигателя 11, и другие сигналы с входов, показанных на фиг. 2. В моторинговом режиме эти управляющие средства являются эффективными для порождения на линии 26 выходного сигнала, имеющего значение, обычно представляющее какую-либо ошибку по величине между сигналом обратной связи питания, который пропорционален произведению VМ и IА, и опорным сигналом нагрузки, который изменяется как функция скорости двигателя. Опорный сигнал нагрузки ограничивает выход мощности альтернатора 13, пока двигатель 11 ускоряется от холостой скорости до предполагаемой максимальной номинальной скорости, и также служит для уменьшения выхода мощности, если двигатель 11 становится перегруженным и начинает "вязнуть" или замедляться. В случае относительно высоких значений VM, IА или скорости двигателя блокирующий сигнал обратной связи питания, пропорциональный соответствующей величине этих параметров, замещает сигнал обратной связи питания, и в течение работы в режиме динамического торможения предварительно селектированный постоянный опорный сигнал замещает указанный опорный сигнал нагрузки. Выходной сигнал на линии 26 управляет работой генератора 25 стробирующих импульсов и посредством этого определяет величину тока в обмотке 16 возбуждения. В результате возбуждение последней управляется так, чтобы регулировать напряжение нагрузки до значения, позволяющего достичь требуемой производительности транспортного средства .
Предлагаемая система силовой передачи включает узел (средства) управления возбуждением двигателя (маркированные "МОТ FLD CONTROLS") для порождения независимо переменного управляющего сигнала на выходной линии 28, которая соединена с обычным генератором 20 стробирующих импульсов. Этот генератор подает периодические запускающие сигналы на другой однофазный двухполупериодный мостовой выпрямитель 30 с фазовым управлением, подключенный между второй вспомогательной обмоткой 15 альтернатора 13 и обмотками возбуждения F1 и F2 двигателей М1 и М2. Две обмотки возбуждения двигателей соединены последовательно друг с другом и с выходом постоянного напряжения выпрямителя 30 через линии 32 и 33 и переключатель 31 изменения полярности. Таким образом, вспомогательная обмотка 15, выпрямитель 30 и генератор 29 стробирующих импульсов заключают в себе отдельный управляемый источник тока возбуждения для обмоток F1 и F2 возбуждения двигателя. Этот ток имеет переменную среднюю величину, а его направление в обмотках возбуждения двигателя зависит от позиции переключателя 31 полярности. При положении переключателя 31 в позиции, указанной сплошными линиями, ток течет слева направо через обмотки F1 и F2 возбуждения, как показано на фиг. 1, и двигатели вращаются в направлении по часовой стрелке. При положении переключателя 31 в позиции, указанной штриховыми линиями, ток течет справа налево через обмотки возбуждения и двигатели вращаются в противоположном направлении или против часовой стрелки.
Средняя величина тока возбуждения в последовательно соединенных обмотках возбуждения зависит от величины управляющего сигнала, который подается на генератор 29 стробирующих импульсов через выходную линию 28 средств управления обмоткой возбуждения двигателя. Средства управления обмоткой возбуждения двигателя принимают входные сигналы на семь различных линий 36, 38, 40, 41, 50, 52 и 54 соответственно. Вход на линию 36 является сигналом тока обмотки возбуждения, имеющим значение, которое меняется со средней абсолютной величиной (IF) тока возбуждения в обмотках F1 и F2 возбуждения двигателя. Чтобы получить этот сигнал, линия 36 соединена с обычным токовым преобразователем в линии 33 через соответствующие средства 37 для преобразования биполярного выхода токового преобразователя в униполярный сигнал напряжения на линии 36, представляющий IF. В частности, электрический потенциал на линии 36, измеренный по отношению к предварительно определенному опорному потенциалу, например земли, имеет величину, пропорциональную количеству ампер, протекающих по линии 33, а его полярность не изменяется вне зависимости от того, является ли полярность выходного сигнала преобразователя положительной или отрицательной по отношению к земле.
Сигнал на второй входной линии 38 имеет значение, которое изменяется со средней величиной тока нагрузки двигателя. Чтобы получить этот сигнал, линия 38 соединена через селектор 39 максимального значения с токовыми преобразователями, которые соответственно размещены в соединениях от линии 20 до двигателей М1 и М2. Эти преобразователи контролируют электрические токи в роторных обмотках пары тяговых двигателей М1 и М2, которые вращают первое и второе колеса транспортного средства, и они получают сигналы обратной связи, представляющие соответственно средние величины этих токов. В результате сигнал на линии 38 фактически представляет верхнюю среднюю величину тока IА нагрузки в двух двигателях.
Сигналы третьей и четвертой входных линий 40 и 41 являются сигналами обратной связи скорости, отображающими соответственно фактические скорости вращения более медленного двигателя и более быстрого двигателя. Эти сигналы выдаются логическими средствами 42 скорости, которые соединены через линии 43 и 44 с парой обычных датчиков 45 и 46 скорости, соединенными с роторами двух двигателей М1 и М2. Выходом датчика 45 скорости является сигнал W1, величина которого изменяется с угловой скоростью ротора двигателя М1, а выходом датчика 46 скорости - сигнал W2, величина которого изменяется с угловой скоростью ротора двигателя М2. Поскольку каждый ротор двигателя механически соединен в отношении управления с колесом транспортного средства, эти сигналы также отображают соответственно скорости вращения первого и второго ведущих колес. Предпочтительно, чтобы каждый из сигналов W1 и W2 фактически являлся последовательностью дискретных импульсов постоянной амплитуды и длительности, но имеющих различную частоту, прямо пропорциональную скорости соответствующего колеса, каковая может быть выражена или оборотами в единицу времени, или линейной скоростью, например милями в час, по периметру шины колеса. Величина сигнала W > обратной связи на линии 41 более быстрого двигателя обычно отображает фактическую скорость транспортного средства.
Пятая входная линия 50 начинается в блоке 51, который представляет собой соответствующее средство для выработки опорного сигнала W* скорости требуемой величины, а шестая 52 и седьмая 54 линии - к управляющим средствам обмотки возбуждения двигателя, берут начало в командном блоке 55 торможения. Последний предствляет собой вручную управляемые средства для порождения на линии 52 предварительно определенного командного сигнала, когда требуется динамическое торможение транспортного средства, и для порождения на линии 54 сигнала торможения, имеющего величину, которая зависит от степени динамического торможения, задаваемого оператором транспортного средства. Командный сигнал создается или в результате нажатия оператором на ножную тормозную педаль транспортного средства (не показана), или увеличения скорости двигателя выше установленной точки превышения скорости. В ответ на этот случай средства управления возбуждением двигателя переключатся с моторингового режима работы, в котором величина управляющего сигнала на линии 28 отображает некоторую разность или ошибку между IF и опорной величиной, изменяющейся как предварительно определенная функция IА, на режим торможения, в котором значение управляющего сигнала отображает некоторую ошибку между IF и опорной величиной торможения. Последняя в пределах, которые являются функциями (предварительно определенными) IА и фактической скорости двигателя, обычно определяется сигналом торможения на линии 54. В то же время обычные исполнительные средства (не показаны) замыкают пару контакторов 57 и 58 одновременно, посредством этого подключая первую тормозную резисторную сетку 59 между линиями 18 и 20 и одновременно подключая вторую тормозную резисторную сетку 60 между линиями 19 и 20. Эти резисторные сетки используются для рассеяния выхода электрической энергии соответствующих двигателей М1 и М2, которые ведут себя как генераторы в течение работы в режиме динамического торможения.
Величина тока IF возбуждения в обмотках возбуждения двигателя зависит от величины управляющего сигнала на выходной линии 28 средств управления обмоткой возбуждения двигателя. В моторинговом режиме работы величина управляющего сигнала увеличивается или уменьшается, когда необходимо уменьшить до нуля некоторую ошибку между IF и опорной величиной, являющейся предварительно определенной функцией от величины тока IА в обмотке ротора двигателя. Предусмотрены соответствующие средства для "программирования" этой функции таким образом, чтобы крутизна отношения между IF и IА и, следовательно, относительная напряженность магнитных полей, возбуждающих тяговые двигатели, не была той же самой при всех значениях IА. Другими словами, отношение IF и IА не является тем же самым, когда IА относительно высок и когда IА низок.
Определенные части средств 27 управления мощностью показаны на фиг. 3, включая средства 62 суммирования, где выход предельного значения селектора 63 высшего положительного значения вычитается из опорной величины нагрузки на линии 64. Разность между суммированными значениями модифицируется, как требуется, посредством средств 65 компенсации и служит в качестве входного сигнала ошибки для схемы управления током обмотки возбуждения в альтернаторе 13. Если высшее предельное значение было меньше, чем опорное значение нагрузки на линии 64, то контроллер (не показан) тока обмотки альтернатора 13 увеличивает электрический выход альтернатора 13, что необходимо для минимизации результирующей разности. В течение работы в моторинговом режиме линия 64 соединена посредством бистабильных переключающих средств 66 с генератором 67 опорного сигнала нагрузки, который соединен с клеммой 21 так, чтобы опорное значение было определено скоростью VS двигателя, тогда как в течение динамического торможения эта линия альтернативно связана посредством переключающих средств 66 с источником 68 предварительно выбранного постоянного значения К1. Селектор 63 высшего положительного значения имеет четыре входа: предельное значение V напряжения; предельное значение MSO блокировки скорости двигателя. Первые три из этих входов получены из блока 69, обеспечивающие требуемые коэффициенты усиления и обычные схемы компенсации, и они определяются соответственно VM, IА и их произведением.
Селектор 63 высшего значения принимает свое четвертое граничное значение MSO от суммирующих средств 70, имеющих первый и второй входы, соответственно отображающие фактическую скорость двигателя и установочную скорость В, которая определяется требуемой минимальной скоростью, при которой MSO будет достаточно высоким, чтобы влиять на значение сигнала ошибки, полученное посредством суммирующих средств 62. Следовательно, MSO включает в себя алгебраическую сумму значений этих двух входов. Первое входное значение пропорционально значению сигнала W> обратной связи двигателя на линии 41. Суммирующие средства 70 подключены к линии 41 через блок 71, который обеспечивает требуемое усиление, и переключатель 72, который замкнут только в моторинговом режиме. Второе входное значение, которое суммирующие средства 70 вычитают из первого входного значения, соответствует установочной скорости В, которая в типичном случае немного ниже, чем максимальная допустимая скорость тяговых двигателей. Относительно высокое усиление блока 71 выбирают таким, чтобы предел MSO блокировки скорости увеличивался до достаточно высокого значения всякий раз, когда скорость двигателя увеличена до установленной точки завышения скорости от указанной минимальной скорости, чтобы уменьшить сигнал ошибки от суммирующих средств 62 до нуля, даже если опорное значение нагрузки на линии 64 достаточно высоко.
Сплошная линия кривой моментной скорости на фиг. 1 от ее начала (О) до точки С иллюстрирует рабочую характеристику, типичную для силовой передачи транспортного средства, такой как описана на фиг. 2-3. Чтобы улучшить эффективность передачи на высокой скорости двигателя, т.е. увеличить использование мощности, желательно поднять кривую моментной скорости, чтобы приблизить до практически постоянной характеристики от точки А до точки В, такой как вдоль линии от точки А до точки D. Достигается этот результат без увеличения физического размера или превышения рабочих ограничений передачи физического размера или превышения рабочих ограничений передачи посредством разрешения требуемому пределу напряжения увеличиваться пропорционально разности между IА и предварительно определенной пороговой величиной (К2), когда скорость двигателя превышает скорость "угловой точки", в то же время совместно уменьшая напряженность (FS) поля двигателя. С этой целью (см. фиг. 3) сигнал обратной связи тока нагрузки на линии 38 подается в формирователь 73 сигнала компенсации переменного напряжения, который порождает на выходной линии 74 сигнал компенсации, отображающий напряжение смещения VC, пропорциональное величине тока IА нагрузки ниже, чем пороговая величина. Этот сигнал компенсации вычитается на суммирующих средствах 75 из сигнала обратной связи напряжения, представляющего выпрямленное выходное напряжение VM альтернатора, приложенное к нагрузке двигателя, а результирующий сигнал от суммирующих средств 75 отображает напряжение VMl , равное VM - VC. Последний сигнал подается на блок 69 усиления и компенсации и он определяет значение V предела напряжения, которое является одним из четырех входных сигналов селектора 63 высшего значения. На линию 74 сигнал компенсации не подается, т. е. VC = 0, если величина фактического тока IА нагрузки не находится ниже упомянутого порога. Пороговая величина К2 выбирается равной величине тока нагрузки при 100% использовании мощности и при скорости двигателя, равной скорости "угловой точки". Внутри рабочей области постоянной мощности IА превышает этот порог и VC = 0. Когда система работает в области предела напряжения, т.е. когда скорость двигателя выше "угловой точки", IА находится ниже порога и вырабатывается сигнал компенсации. В этот момент сигнал ошибки на контроллер поля альтернатора 13 задает току в обмотке возбуждения альтернатора ту величину, которая необходима для минимизации разности между значением V предела напряжения и опорным значением нагрузки на линии 64. Поскольку значение V предела напряжения определяется разностью между VM и VC, выходное напряжение VM может увеличиться до более высокого уровня, чем было до того в области предела напряжения для данного опорного значения нагрузки, заданного постоянным. Величина увеличения равна переменному напряжения VC смещения. Сигнал компенсации на линии 74 увеличивается с уменьшением IА (ниже порога К2), пока не достигнут предварительно определенного максимального значения, соответствующего VC - К3, а узел компенсации соответственно организуется для предотвращения увеличения сигнала компенсации выше этого значения, если IА продолжает уменьшаться. Пока сигнал компенсации зафиксирован на своем максимальном значении, операция регулирования иллюстрируемой схемы управления питанием предотвращает дальнейшее увеличение величины выходного напряжения VM.
На фиг. 4 показано семейство кривых, иллюстрирующих типовые соотношения между средними величинами напряжения нагрузки и средней величиной тока нагрузки на выходных клеммах выпрямителя 17, которые подаются типовым альтернатором 13, приводимым в движение с постоянной скоростью, например, 1900 об/мин, двигателем 11 и возбуждаемым током в обмотке возбуждения нескольких различных значений, отмеченных на соответствующих кривых. На эти кривые (фиг. 4) наложена другая кривая 76, иллюстрирующая напряжение тока нагрузки, требуемое для работы с постоянной мощностью при максимальном номинальном выходе мощности типового альтернатора. Для частного альтернатора уровень максимального длительного тока в обмотке возбуждения составляет 215 А и показан кривой 78. Однако более высокий ток в обмотке возбуждения может быть допустим в короткие периоды времени и необходим для лучшей эффективности в момент старта транспортного средства, когда ток нагрузки относительно высок. Например, альтернатор требует ток в обмотке возбуждения около 325 А, чтобы генерировать 2500 А тока нагрузки при 600 В. Чтобы достичь работы на кривой 76 постоянной мощности, средства управления мощностью должны заставить ток в обмотке возбуждения измениться от около 325 А при старте до около 200 А, когда скорость каждого тягового двигателя приблизится к "угловой точке" (см. точку А на фиг. 1). В точке Е пересечения двух кривых 76 и 78 фактическая величина тока в обмотке возбуждения альтернатора равна уровню максимального длительного тока в обмотке возбуждения в 215 А, напряжение нагрузки и ток имеют указанные значения, а скорость "угловой точки" достигнута. Когда скорость двигателя увеличивается выше скорости "угловой точки", альтернатор не может продолжать развивать такое же значение мощности, т.е. значение, представленное кривой 76, без увеличения тока в обмотке возбуждения выше 215 А. Чрезмерный ток в обмотке возбуждения при длительном существовании перегревает обмотки возбуждения и выводит из строя альтернатор. Как объяснялось выше, эта проблема была до этого устранена наложением фиксированного ограничения на выходное напряжение альтернатора посредством этого предупреждая превышение максимальным напряжением нагрузки значения верхней "угловой точки" UCP, которое достигается в точке Е пересечения. Такой фиксированный предел напряжения показан линией 80 и он сказывается в отклонении от кривой постоянной мощности фиг. 1, как показано линией от точки А до точки С.
В соответствии с настоящим изобретением требуемое большее использование мощности на высокой скорости двигателя достигается разрешением напряжению альтернатора увеличиваться выше предела UCP, который он достигает, когда скорость двигателя становится равна скорости "угловой точки", и посредством уменьшения или ослабления напряженности поля двигателя. Фиг. 4 иллюстрирует напряжение VM нагрузки, увеличивающееся по линии 82 от точки Е до верхнего значения на второй верхней "угловой точке" G, пока ток обмотки альтернатора остается равным или меньше, чем его максимальный длительный уровень. Верхнее UCP значение равно или меньше, чем предел максимального выходного напряжения альтернатора. Для иллюстрируемого примера требуемый предел напряжения увеличивается от UCP порядка 1700 В до более высокого UCP порядка 2000 В. Разность (К3) между первым и вторым предельными значениями напряжения составляет 300 В, которые поровну делятся на два двигателя М1 и М2. Фиг. 4 также иллюстрирует ток IА нагрузки, уменьшающийся по линии 82 от первого порогового значения (К2) около 1000 А в точке Е до второго более низкого порогового значения (К4) около 530 А в точке G.
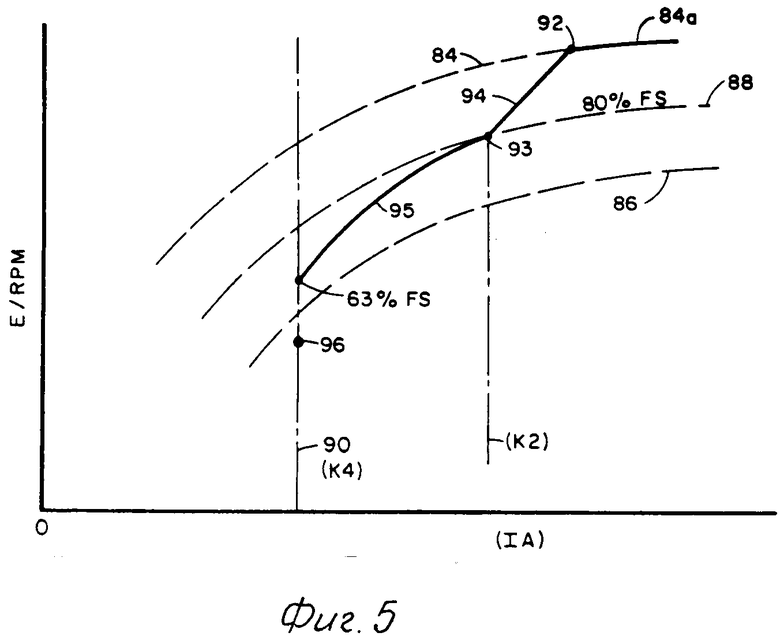
Преимущество увеличения предела напряжения может быть оценено сравнением разницы в величине мощности, подаваемой на два последовательно соединенных двигателя М1, М2 при 1700 и 2000 В соответственно. Перед выполнением этого сравнения обратимся к фиг. 5, которая иллюстрирует нагрузочную характеристику насыщения типового электрического тягового двигателя с независимым возбуждением, который может быть использован на практике. На фиг. 5 ток IА в роторной обмотке двигателя (ток нагрузки) изображен как функция отношения противоЭДС Е ротора двигателя к угловой скорости Е/RPM. Верхняя кривая 84 представляет отношение между этими переменными при полной (100%) напряженности FS поля двигателя. Нижняя кривая 86 представляет их отношение при минимальной FS, т.е. при возбуждении поля двигателя, ниже которого коммутация становится неудовлетворительной. Типовая минимальная напряженность поля составляет около 57%. Средняя штриховая кривая 88 соответствует типовой слабой, но безопасной FS на первом UCP значении выходного напряжения VM альтернатора (точка Е на фиг. 4) и может быть около 80% полной FS. Вертикальная линия 90 показывает высшее значение, которого IА может иметь без превышения предела коммутации двигателя, когда двигатель работает на максимальной допустимой скорости. Предпочтительно, линия 90 совпадает с вторым пороговым значением К4 тока IА нагрузки и определяет второй UCP значение напряжения VM (точка G на фиг. 4). Обычно двигатель начинает работу на крайнем правом участке сплошной линии 84а, являющейся частью линии 84, т.е. при высоком значении тока и полной напряженности поля. Когда скорость двигателя и противоЭДС увеличиваются, IА уменьшается, требуемое постоянное отношение величины тока в обмотке возбуждения к величине тока в обмотке ротора IF/IА первоначально в двигателе сохраняется, а отношение между Е/RPM и IА является таким, как показано сплошной линией 84а. Когда IА уменьшается от определенной точки 92 на линии 84а до низкого значения, указанного точкой 93 на фиг. 5, напряженность поля двигателя прогрессивно уменьшается за счет уменьшения IF/IА от его постоянного отношения полного поля до низкого отношения, которое является его заданной долей, например 0,8, а отношение между Е/RPM и I А будет теперь таким, как показано линией 94, связывающей две точки 92 и 93. Точка 93 соответствует скорости "угловой точки" двигателя (см. точку А на фиг. 1) и первому UCP значению напряжения нагрузки (см. точку Е на фиг. 4). В точке 92 излома IА имеет величину, например, около 1150 А, которая позволяет напряженности поля двигателя изменяться на требуемом постоянном уровне от 100% FS в точке 92 до более низкой заданной FS, например 80% FS в точке 93. Когда тяговый двигатель ускоряется от скорости "угловой точки" до его максимально допустимой скорости, IА продолжает уменьшаться. В соответствии с настоящим изобретением, когда А1 уменьшается от точки 93 до предела коммутации максимальной скорости, показанного вертикальной линией 90 на фиг. 5, например около 530 А, поле двигателя ослабляется дальше, но на меньшем уровне, чем было в случае, когда I А уменьшался от точки 92 к 93, за счет прогрессивного уменьшения IF/IА до нового отношения, которое является даже меньшей предварительно определенной долей отношения полного поля. Новое IF/IА отношение выбирают таким, чтобы при равенстве IА его пределу коммутации ослабленное поле имело предварительно определенную напряженность, например, приблизительно 63% FS, заметно ниже, чем заданная FS в точке 93, но не ниже, чем указанная минимальная напряженность поля (кривая 86). Отношение между Е/RPM и IА от точки 93 до линии 90 является таким, как показано линией 95 на фиг. 5. В известных силовых передачах, когда скорость двигателя увеличивается выше скорости угловой точки и IА уменьшается ниже его значения в точке 93 на фиг. 5, напряженность поля двигателя, в основном, сохраняется постоянной (кривая 88, изображенная штриховой линией), а выходное напряжение альтернатора фиксируется на постоянном пределе, например 1700 В. Если постоянная напряженность поля составляет 80% , а фиксированный предел напряжения составляет 850 В на двигатель, скорость двигателя достигнет только около 1635 об/мин при IА = 530 А. Чтобы довести 80% FS характеристику до максимально допустимой скорости двигателя, IА должно уменьшиться до около 330 А и двигатель развивает многоменьший вращающий момент. Кроме того, может быть показано, что уменьшаемая напряженность поля для достижения максимальной скорости двигателя при 850 В дает в результате FS ниже минимального приемлемого слабого возбуждения поля в 57%. Точка 96 отражает напряженность поля (около 45%), при которой максимальная скорость могла бы быть достигнута при 850 В и 530 А.
Чтобы понять воздействие описанных пределов, рассмотрим дизельный двигатель 11, выдающий 2350 лошадиных сил сетевой мощности на альтернатор 13, пару тяговых двигателей, работающих при 80% напряженности поля с максимально допустимой скоростью в 2320 об/мин, и известную силовую передачу, которая сохраняет 80% FS и позволяет развивать двигателю максимальную скорость при IА, равном 330 А. максимальная мощность, которую альтернатор выдает на оба двигателя на максимальной скорости, пропорциональна произведению 1700 В и 330 А и составляет около 561 КВт. Если напряжение поднимется до 2000 В (около 1000 В на двигатель для двух последовательно соединенных двигателей) и если IА увеличивается до его предела коммутации в 530А на максимальной скорости, эта скорость может быть достигнута при 63% FS (выше минимального допустимого возбуждения слабого поля), что дает в результате выход мощности в 2000 х 530 или около 1060 КВт. Имеет место почти двойное использование мощности известной передачи.
При желании использование мощности могло бы быть увеличено только увеличением предела напряжения альтернатора и без изменения напряженности поля. Например, для 80% FS и 2000 В может быть показано, что максимальная скорость двигателя достижима при 390А, давая в результате выход мощности в 2000 х 390 или 780 КВт и увеличение в 40% по сравнению с известной передачей. Если напряженность поля двигателя уменьшится при сохранении предела напряжения, зафиксированного на 1700 В, то максимальная скорость двигателя не может быть достигнута при 530 А, потому что напряженность поля должна уменьшиться ниже минимального предела в 57%. Например, для двигателей, имеющих характеристику, показанную на фиг. 5, максимальная скорость при 530 А потребует напряженности поля около 45%. Поскольку эта напряженность поля меньше, чем минимальное слабое возбуждение поля в 57%, то напряженность поля не может быть настолько уменьшена. Максимальная скорость при фиксированном пределе напряжения и минимальной напряженности поля вызовет только 33% увеличение выхода мощности по сравнению с известной передачей с 80% напряженностью поля.
Обратимся снова к фиг. 2 и 3. Регулятор поля альтернатора 13 из средств 27 управления мощностью отвечает на сигнал ошибки от средств 65 компенсации, чтобы изменить значение напряжения VM так, как необходимо для минимизации этой ошибки. Сигнал ошибки отражает разность между опорным значением нагрузки (предполагаемым постоянным) на линии 64 и наивысшим из четырех предельных значений V, HP, I и MSO. Всякий раз, когда скорость двигателя превышает скорость "угловой точки" и не превышает указанной установочной скорости В, предельное значение V будет выше, чем другие три. Теперь передача работает в области предела напряжения, так что VM не превышает требуемого предела, определенного опорным значением нагрузки. В примере, показанном на фиг. 4, требуемый предел составляет 1700 В, когда фактическая скорость двигателя равна скорости "угловой точки", а усиление, которое связывает величину VM с значением V предела напряжения, выбирают таким, чтобы V было равно опорному значению нагрузки, когда VM = =1700. Если V определяется исключительно величинойVM, как это происходит в известной силовой передаче, то VM поддерживается при одном и том же пределе по области предела напряжения. Настоящее изобретение использует узел компенсации, чтобы получить сигнал независимой компенсации тока нагрузки, который вычитается из сигнала обратной связи напряжения нагрузки способом, объясненным ранее, посредством чего VM может увеличиться до требуемого предела, который не является фиксированным, но увеличивается, когда скорость двигателя возрастает выше "угловой точки", не заставляя значение V предела увеличиваться выше опорного значения нагрузки. Этот возрастающий предел напряжения требуемым образом увеличивает процент максимальной номинальной мощности, которая подается на тяговые двигатели при скоростях, приближающихся к максимальной допустимой скорости двигателя. Хотя рабочая область предела напряжения находится в диапазоне изменений скорости двигателя от скорости "угловой точки" до максимальной точки, на практике, если указанная установочная скорость В ниже, чем максимальная скорость, величина выходного напряжения альтернатора 13 не превышает UCP предела (VM = 2000) при максимальной скорости двигателя и фактически уменьшается до нуля при действии предельного значения MSO блокировки скорости двигателя.
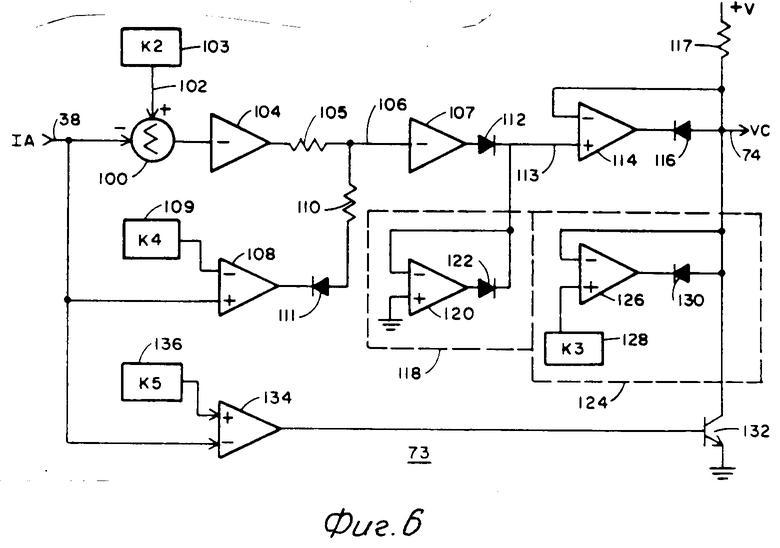
Схема компенсации переменного напряжения показана на фиг. 6. Различные пассивные компоненты, в основном требующиеся в таких схемах, такие, как смещающие и соединяющие резисторы и конденсаторы, хорошо известны. Входной сигнал на линии 38, отображающий ток IА нагрузки двигателя, подается на суммирующие средства 100, где вычитается из другого сигнала на линии 102. Сигнал на линии 102 получен из соответствующих средств 103 и имеет предварительно определенную постоянную величину, соответствующую указанному пороговому значению К2 IА. Результирующий сигнал от суммирующих средств 100, следовательно, имеет величину, пропорциональную разности между IА и К2, а знак - отрицательный, когда IА больше, чем К2, и положительный, когда IА меньше, чем К2. Этот сигнал приложен к инвертирующему усилителю 104, а выходная клемма усилителя 104 соединена через резистор 105 и линию 106 с выходной клеммой другого инвертирующего усилителя 107. Токовый сигнал обратной связи на линии 38 также поступает на первый вход усилителя 108. Соответствующие средства 109 предусмотрены для подачи на второй вход усилителя 108 сигнала предварительно определенной постоянной величины, соответствующей второй пороговой величине К4 тока IА нагрузки (К4 ниже, чем К2). Усилитель 108 имеет положительный выход, пока IА больше, чем К4, и его выход становится отрицательным в ответ на увеличение IА до К4. Выход усилителя 108 соединен с линией 106 через резистор 110 и диод 111, который включен так, что проводит только тогда, когда этот выход отрицателен.
Усиленный инвертированный разностный сигнал от суммирующих средств 100 инвертируется снова вторым усилителем 107 и подается через изолирующий диод 112 на линию 113. Линия 113 соединена с неинвертирующим входным контактом усилителя 114. Выходной контакт усилителя 114 соединен через диод 116 с выходной линией 74, на которой вырабатывается сигнал компенсации, отображающий напряжение VC смещения. Резистор 117 соединяет выходную линию 74 и шину +V управляемого питания относительно положительного постоянного напряжения. Пока диод 116 находится в проводящем состоянии, величина сигнала компенсации на линии 74 определяется выходным значением усилителя 114. Блок 118 фиксации нулевого выходного напряжения подключен к линии 113 для гарантии, что выход усилителя 114 зафиксирован на опорном потенциале, например 0В, всякий раз, когда результирующий сигнал от суммирующих средств 100 отрицателен, т. е. всякий раз, когда IА выше, чем К2. Блок 118 фиксации включает инвертирующий усилитель 120, имеющий неинвертирующий входной контакт, подключенный к линии опорного потенциала, например земле, инвертирующий входной контакт, подключенный непосредственно к линии 113, и выходной контакт, подключенный к той же самой линии 113 через диод 122, который находится в непроводящем или блокирующем состоянии всякий раз, когда напряжение на линии 113 положительно по отношению к земле. Следовательно, сигнал компенсации может быть подан на линию 74 только тогда, когда IА меньше, чем К2, и в этом случае величина сигнала компенсации отслеживает величину разности между IА и К2.
Чтобы ограничить отклонение сигнала компенсации от предварительно определенного максимального значения, блок 124 фиксации максимального значения соединен с выходной линией 74 узла компенсации. Блок 124 фиксации включает инвертирующий усилитель 126, имеющий неинвертирующий входной контакт, соединенный с соответствующими средствами 128 для обеспечения сигнала предварительно определенной постоянной величины, соответствующей требуемому максимальному значению К3 переменного напряжения VC смещения, инвертирующий входной контакт, соединенный непосредственно с линией 74, и выходной контакт, соединенный с той же самой линией 74 через диод 130. Всякий раз, когда положительное выходное напряжение усилителя 114 ниже, чем предварительное постоянное значение сигнала, создаваемого средствами 128, т.е. всякий раз, когда VC меньше, чем К3, диод 130 находится в непроводящем или блокирующем состоянии. В противном случае диод 130 - проводящий, диод 116 находится в блокирующем состоянии, значение сигнала компенсации на линии 74 определяется постоянным напряжением усилителя 126 и VC остается равным К3. В результате диоды 116 и 130 формируют схему селектора наименьшего значения, которая селектирует в качестве сигнала компенсации меньшее из положительных выходных напряжений соответствующих усилителей 114 и 126. Выходной сигнал усилителя 114 достигает предварительно определенного значения, которое инициализирует описанное действие фиксации, когда IА на определенную величину ниже, чем К2. Указанное второе пороговое значение К4 выбирается так, чтобы по существу оно было равно К2 минус эта определенная величина. Таким образом, IА уменьшается до К4 в фактически то же самое время, когда действие фиксации блока 124 становится эффективным. В результате уменьшения IА до К4 выходной сигнал усилителя 108 изменяется от положительного до отрицательного, диод 111 изменяет свое состояние с блокирующего на проводящее, большой отрицательный сигнал прикладывается к входу инвертирующего усилителя 107, выход последнего усилителя переводится на уровень насыщения (максимум), а выходной сигнал усилителя 114 резко возрастает до значения, значительно выше предварительно определенной величины, которая инициализирует фиксирующее действие. Это шаговое увеличение выходного напряжения усилителя 114 гарантирует, что диод 116 определенно находится в блокирующем состоянии, посредством этого запирая блок фиксации максимального значения.
Чтобы выключить узел компенсации в течение динамического торможения, между линией 74 и землей включен ключ 132 на n-p-n транзисторе. Управляющий вывод транзисторного ключа 132 подключен к выходу бистабильного компаратора 134. Предусмотрены соответствующие средства 136 для подачи на первый вход компаратора 134 сигнала предварительно определенного положительного постоянного значения, соответствующего третьему относительно низкому пороговому значению К5 тока IА нагрузки (К5 ниже, чем К4). Сигнал обратно связи, представляющий IА, подается на другой вход этого компаратора. Если IА положителен и ниже, чем К5, или если IА отрицателем (как в течение динамического торможения), компаратор 134 будет в первом состоянии, в котором его выход находится в высоком состоянии или "1", и, следовательно, транзисторный ключ 132 переводится в проводящее состояние. Пока ключ 132 проводит или "включен", линия 74 находится под потенциалом земли и отсутствует сигнал компенсации, т.е. VC = 0. Однако если IА положителен и выше, чем К5 (как в течение моторингового режима работы), компаратор 134 будет в низком состоянии или "0" выхода, из-за чего ключ 132 не проводит.
В итоге описанная функция vari-volt эффективна, когда силовая передача работает в области предела напряжения, чтобы обеспечить напряжение VC переменного смещения, позволяющее требуемый предел напряжения VM питания увеличивать от его первого UCP значения (точка Е на фиг. 4) до более высокого UCP значения (точка G на фиг. 4) в пропорции к величине, на которую ток IА нагрузки уменьшается ниже его порогового значения К2 (точка Е на фиг. 4 и точка 93 на фиг. 5). Это увеличивает процент максимальной номинальной мощности, которую альтернатор выдает на тяговые двигатели, когда скорость двигателя превысит скорость "угловой точки" по сравнению с известной передачей, в которой предел напряжения является фиксированным на первом UCP значении. Чтобы оптимизировать величину мощности, выдаваемой на двигатели, когда VM равно верхнему UCP значению, средства управления полем двигателя организуются для такого изменения отношения IF к IА, чтобы напряженность поля двигателя изменялась от заданной FS, когда IА = К2 (в точке 93 на фиг. 5) до предварительно определенной более слабой FS, когда IА равен его второму более низкому пороговому значению К4 (линия 90 на фиг. 5), установленному пределом коммутации двигателя на максимальной допустимой скорости двигателя. В результате двигатели достигнут максимальной скорости одновременно с достижением напряжением питания его верхнего UCP значения.
Использование: дизель-электрические грузовики, аппаратура для оптимизации мощности, выдаваемой управляамым от дизельного двигателя генератором (альтернатором) электрической энергии на электрический тяговый двигатель с регулируемой скоростью в процессе работы на высокой скорости. Сущность изобретения: альтернатор соответствующим образом управляется для выдачи постоянной мощности, если его выходное напряжение не превышает первого предварительно определенного значения, соответствующего скорости "угловой точки" на механической характеристике двигателя, и для ограничения величины напряжения, когда скорость двигателя превышает эту "угловую точку", посредством этого предохраняя ток возбуждения от превышения уровня максимального продолжительного тока в обмотке возбуждения альтернатора. Когда скорость двигателя увеличивается выше скорости "угловой точки", на двигатель выдается меньшая мощность, но уменьшение мощности минимизируется посредством увеличения предела напряжения выше первого предварительно определенного значения. Величина увеличения предела напряжения вплоть до предварительно определенного максимального уровня пропорциональна величине снижений тока нагрузки двигателя ниже его значения, когда скорость двигателя равна скорости "угловой точки". Совместно с этим увеличением предела напряжения уменьшается отношение величины тока в обмотке возбуждения двигателя к току нагрузки. Посредством этого ослабляется поле двигателя, которое позволяет двигателю работать на максимально допустимой скорости без превышения предела коммутации двигателя всякий раз, когда достигается увеличение на предварительно определенную максимальную величину предела напряжения. 2 с.и 8 з.п. ф-лы, 6 ил.
| Ефремов И.С | |||
| и др | |||
| Теория и расчет тягового привода электродвигателей | |||
| М.: Высшая школа, 1984, с.30-38, рис.1.12, с.43-47, 84-88, 90-100. |

