Изобретение относится к горному делу и может быть использовано для автоматизации управления гидрофицированными крепями.
Известна система контроля переднего положения секций механизированной крепи (авт. св. N 885567), содержащая датчик переднего положения секций и гидравлические связи.
Управляющий сигнал поступает с предыдущей секции на ряд гидроэлементов, которые переключаются и подключают линию управления к исполнительному блоку. Начинается передвижка секции. Домкрат передвижки секции по окончании цикла передвижки воздействует на датчик переднего положения, который переключается и соединяет камеру управления исполнительным блоком со сливом. На этом передвижка секции заканчивается и секция начинает распираться. По окончании распора срабатывает реле давления и выдает сигнал управления на следующую секцию.
Основным недостатком данной системы контроля переднего положения секций является ее непригодность для использования на выбросоопасных пластах, где требуется дистанционный контроль управления крепями. Согласно существующим требованиям на выбросоопасных пластах необходимо осуществлять дистанционный контроль за передвижкой извне пределов видимости секций, что практически невозможно осуществить с помощью непосредственной блокировки между секциями через датчик переднего положения. Информация от датчиков должна быть выведена на штрек в безопасную зону, где находится оператор. Для этого требуется от каждого датчика протянуть на штрек гидравлическую линию, что практически неосуществимо.
Известна система контроля переднего положения секций (авт. св. N 1514956), содержащая датчики секций, выполненные в виде дифференциальных переключающих устройств, обе полости которых сообщены с линией управления воспринимающего элемента, установленного с возможностью взаимодействия с цилиндром гидродомкрата, блок управления, сообщенный гидролиниями с линией напора и слива и со штоковой и поршневой полостями гидродомкрата передвижки, индикатор давления с дросселем, сообщенным с реле давления и с выходом датчика первой секции, вход которого посредством контрольной линии соединен последовательно с выходами и входами датчиков остальных секций, вход последнего из которых соединен с линией напора, при этом поршни дифференциальных переключающих устройств выполнены подвижными относительно друг друга, а линия управления сообщена со штоковой полостью гидродомкрата передвижки.
Данная система дополнительно усложнена индикаторами давления, гидрораспределителями и гидромагистралью. В такой системе из-за потерь давления в дополнительных узлах и магистралях и увеличения утечек в них снижается уровень перепада давления, что приводит к снижению чувствительности индикаторов давления и недостаточной надежности в работе.
Наиболее близким по технической сущности к предлагаемому является устройство контроля переднего положения секции крепи, основанное на измерении перемещения штока домкрата передвижки (Руководство по эксплуатации УАК. 00.00.000РЭ. Устройство автоматизации комплекса КМ138А УАК.УХЛ5. Донецк: НПО Автоматгормаш, 1986).
Устройство состоит из постоянного магнита, магнитоуправляемого контакта МУК, клеммной коробки, пульта управления секций ПУС и кабельной линии связи. Постоянный магнит закреплен на штоке гидродомкрата передвижки, а МУК - на корпусе этого домкрата. Выводы от МУК проложены в защитной трубе, жестко соединенной с клеммной коробкой. При полной передвижки секции магнит приближается к МУК, который срабатывает и замыкает цепь контроля положения секции.
Данному устройству присущи следующие недостатки.
Устройство содержит большое количество МУК и разветвленную сеть кабельных связей. Под действием агрессивной шахтной среды снижается сопротивление изоляции электрической сети, что снижает надежность системы. Кроме того, по этой же причине в системе возникают дополнительные потери мощности, что при ограниченной искробезопасной мощности источника питания приводит к падению напряжения в системе и ложным срабатываниям. Кроме того, кабели, клеммные коробки и пульты управления повреждаются падающими кусками породы и движущимися частями машин.
По этим причинам при испытании экспериментального образца аппаратуры автоматизации крепи М138Н на шахте "Распадская" П.О.Южкузбассуголь данная аппаратура оказалась неработоспособной.
Целью изобретения является обеспечение надежного дистанционного контроля переднего положения секций.
Поставленная цель достигается тем, что устройство контроля содержит домкраты передвижки, датчики секций, гидравлические связи и гибкий орган, присоединенный посредством пружин натяжения к блоку контроля за перемещением гибкого органа, каждая секция снабжена механизмом захвата, между зажимами которого закреплен гибкий орган.
В качестве гибкого органа может быть использован металлический трос, концы которого подсоединены к пружинным механизмам.
Захваты представляют собой два зажима, один из которых неподвижен и имеет полочку для укладки гибкого органа, а другой перемещается вдоль полочки и зажимает гибкий орган.
Блок контроля состоит из измерителя расстояния, выполненного в виде двух счетчиков, один из которых фиксирует перемещение конца гибкого органа на эталонное расстояние, соответствующее додвижке секции в переднее положение, а другой фиксирует недодвижку секции в переднее положение, которое имеет место, если конец гибкого органа не перемещается на эталонное расстояние.
Пружинный механизм служит для натяжения гибкого органа и обеспечивает возможность перемещения конца гибкого органа на расстояние не менее эталонного.
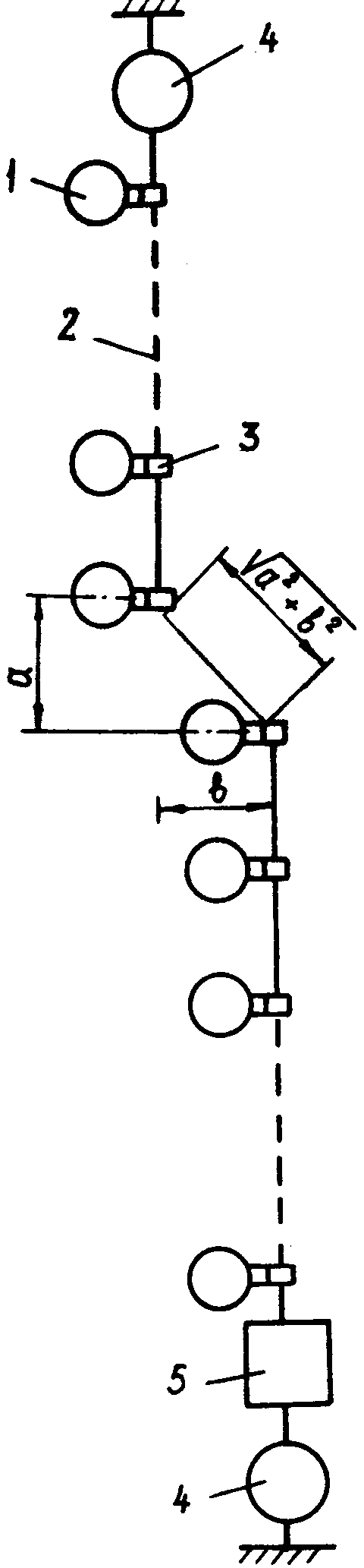
На чертеже представлена схема предлагаемого устройства контроля.
Устройство содержит секцию крепи 1, гибкий орган 2, захват 3, пружинный механизм 4 и блок 5 контроля.
Устройство работает следующим образом.
В исходном положении все секции крепи 1 находятся на одной линии. Гибкий орган 2 свободно проходит через зажимы захватов 3 всех секций. По обоим концам гибкий орган растянут с помощью упругой связи, т.е. пружинным механизмом 4, до величины, когда провисание гибкого органа между секциями отсутствует. После прихода от комбайна команды на передвижку секции гидрозахват срабатывает и зажимает гибкий орган. Начинается передвижка секции. При этом гибкий орган вытягивается с одной стороны и ослабляется с другой на величину
Δl = -a, где а - расстояние между секциями;
-a, где а - расстояние между секциями;
b - шаг передвижки.
Например, если расстояние между секциями равно 1 м, а шаг передвижки 0,6 м, то величина перемещения конца гибкого органа равна 17 см. Это расстояние контролируется счетчиком блока контроля. Как только секция доходит до своего крайнего положения, счетчики фиксируют додвижку. Гидрозажим отпускает гибкий орган, который, перемещаясь в обратном направлении, становится в исходное положение. Устройство готово к контролю передвижки следующей секции. В случае, если секция не додвинется, срабатывает вспомогательный счетчик и фиксирует недодвижку секции. При этом основной счетчик не срабатывает.
Предлагаемое техническое решение дает возможность обеспечить надежный контроль переднего положения секций, что обеспечивает возможность управления механизированной крепью на пластах, опасных по внезапным выбросам извне пределов видимости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления механизированной крепью | 1990 |
|
SU1809099A1 |
| Устройство удержания базовой балки механизированной крепи для крутых пластов | 1988 |
|
SU1608352A1 |
| Система контроля переднего положения секций механизированной крепи | 1987 |
|
SU1514956A1 |
| СПОСОБ ИСПЫТАНИЯ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ ГОРНЫХ КОМБАЙНОВ, ПРЕИМУЩЕСТВЕННО РОТОРНОГО ТИПА, НА ФРИКЦИОННУЮ ИСКРОБЕЗОПАСНОСТЬ | 1992 |
|
RU2064592C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ПРИЗАБОЙНОЙ ЗОНЫ ОЧИСТНОЙ ВЫРАБОТКИ ОТ СКАТЫВАЮЩИХСЯ КУСКОВ ГОРНОЙ МАССЫ | 1992 |
|
RU2066766C1 |
| СПОСОБ ИСПЫТАНИЯ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ ГОРНЫХ КОМБАЙНОВ НА ФРИКЦИОННУЮ ИСКРОБЕЗОПАСНОСТЬ | 1992 |
|
RU2061881C1 |
| СПОСОБ РАЗРАБОТКИ КРУТЫХ УГОЛЬНЫХ ПЛАСТОВ | 1992 |
|
RU2081317C1 |
| Система пылеподавления механизированной крепи | 1980 |
|
SU900029A1 |
| Нарезной комбайн | 1986 |
|
SU1382945A1 |
| Устройство для улавливания ленты конвейера в случае ее обрыва | 1983 |
|
SU1115980A1 |
Использование: автоматизация управления гидрофицированными крепями. Сущность изобретения: устройство содержит домкраты передвижки, связанные с гидравлической системой и гибким органом. Последний закреплен по концам и связан через блоки для контроля его положения с фиксирующими элементами, закрепленными на перемещаемых секциях. Фиксирующие элементы выполнены в виде захватов с зажимами. Блоки для контроля положения гибкого органа выполнены в виде счетчиков додвижки и недодвижки секций и связаны с гибким органом упругой связью. Последняя может быть выполнена в виде троса. 1 з.п.ф-лы, 1 ил.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ БАЗЫ МЕХАНИЗИРОВАННОЙ | 0 |
|
SU364746A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
