Изобретение относится к электронике и может использоваться в радиотехнических устройствах и системах с управляемыми индуктивностями, работающими в широком температурном диапазоне.
Известен способ коррекции температурной характеристики активной индуктивности, заключающийся в том, что измеряют температуру окружающей среды и в зависимости от результатов таких измерений подают постоянный эмиттерный ток либо от источника тока (при низкой температуре окружающей среды), либо от источника напряжения (при температуре окружающей среды выше заданной). Однако такой способ имеет недостаточную температурную стабильность и сложен.
Наиболее близким по технической сущности к предлагаемому является способ, который заключается в том, что измеряют температуру окружающей среды и подают постоянное напряжение на шину питания. При увеличении температуры увеличивают сопротивление делителя Rдел, задающего общий ток Iдел=  , (1) где Еп - питающее напряжение;
, (1) где Еп - питающее напряжение;
rk, ri ... rj - сопротивления резистивного делителя. Последовательно с резистивным делителем rk, ri ... rj включают переход коллектор-эмиттер транзистора. Это сопротивление Rкэ определяет момент включения и выключения транзисторов, образующих эквивалент p-n-p-n-структуры. Включение эквивалента p-n-p-n-структуры осуществляется при условии
Iдел(rk+ri+. . . +rj)≥Uбэ, (2) где Uбэ - напряжение на переходе база-эмиттер транзистора.
Увеличение температуры окружающей среды приводят к дрейфу напряжения на переходе база-эмиттер транзисторов
ΔUбэ= Uбэо- ε ˙ ΔТ, (3) где Uбэо - напряжение на переходе база-эмиттер транзистора при температуре Т=20оС; ε =(2-3) МВ/град - скорость дрейфа напряжения на переходе база-эмиттер;
ΔТ - приращение температуры. В результате этого эквивалент p-n-p-n-структуры включается при меньшем питающем напряжении, а ВАХ S-типа перемещается вдоль оси напряжений влево. Отрицательное дифференциальное сопротивление устройства с ВАХ S-типа определяется как R
R =
=  , (4) где Uвкл, Uвыкл, Iвкл, Iвыкл - напряжения и токи включения и выключения.
, (4) где Uвкл, Uвыкл, Iвкл, Iвыкл - напряжения и токи включения и выключения.
Для термостабилизации отрицательного дифференциального сопротивления необходимо выполнить систему уравнений
 (5) что никогда не соблюдается в реальных условиях эксперимента. С повышением температуры окружающей среды сопротивление перехода коллектор-эмиттер Rкэ термокомпенсирующего транзистора увеличивается, ток Iдел, протекающий через резистивный делитель, уменьшается. Поэтому для включения p-n-p-n-структуры, согласно соотношению (2), необходимо повысить ток Iдел, что достигается за счет увеличения питающего напряжения Еп. Это приводит к смещению ВАХ S-типа вправо и к частичной компенсации дрейфа напряжений и токов включения и выключения. Дрейф отрицательного дифференциального сопротивления
(5) что никогда не соблюдается в реальных условиях эксперимента. С повышением температуры окружающей среды сопротивление перехода коллектор-эмиттер Rкэ термокомпенсирующего транзистора увеличивается, ток Iдел, протекающий через резистивный делитель, уменьшается. Поэтому для включения p-n-p-n-структуры, согласно соотношению (2), необходимо повысить ток Iдел, что достигается за счет увеличения питающего напряжения Еп. Это приводит к смещению ВАХ S-типа вправо и к частичной компенсации дрейфа напряжений и токов включения и выключения. Дрейф отрицательного дифференциального сопротивления  R
R приводит к дрейфу активной индуктивности, выполненной на элементе с ВАХ S-типа, которая определяется как
приводит к дрейфу активной индуктивности, выполненной на элементе с ВАХ S-типа, которая определяется как
Lэкв(ω)= , (6) где Ro - сопротивление резистора, включенного последовательно с элементом, обладающим ВАХ S-типа и задающим положение рабочей точки;
, (6) где Ro - сопротивление резистора, включенного последовательно с элементом, обладающим ВАХ S-типа и задающим положение рабочей точки;
Сн - емкость нагрузки;
ω = 2πf - круговая частота.
Недостатком способа является недостаточная температурная стабильность, заключающаяся в том, что при его использовании для термостабилизации устройств с вольт-амперной характеристикой S-типа, работающих в линейном режиме (индукивностей, усилителей, генераторов), даже незначительное изменение отрицательного дифференциального сопротивления приводит к существенной нестабильности коэффициента преобразования K, определяемого соотношением
K=  =
=  , (7) где α - угол наклона прямой, являющейся вольт-амперной характеристикой резистора Ro;
, (7) где α - угол наклона прямой, являющейся вольт-амперной характеристикой резистора Ro;
ζ - угол между участком вольт-амперной характеристики, на котором активный элемент обладает отрицательным дифференциальным сопротивлением и прямой, являющейся вольт-амперной характеристикой резистора Rо. Для термостабилизации дрейфа индуктивности на элементе с вольт-амперной характеристикой S-типа достаточно (при изменении температуры окружающей среды) поддерживать угол постоянным (т.е. выполнить соотношение Δζ=0).
Цель изобретения - повышение температурной стабильности.
Поставленная цель достигается тем, что при способе термостабилизации активной индуктивности на элементах с вольт-амперной характеристикой S-типа, заключающемся в компенсации тепловых изменений вольт-амперной характеристики элемента с вольт-амперной характеристикой (ВАХ) S-типа, согласно изобретению компенсацию тепловых изменений вольт-амперной характеристики элемента с ВАХ S-типа осуществляют путем определения и запоминания зависимости от температуры параметров:
ΔUвкл(to) - напряжения включения элемента с вольт-амперной характеристикой; R
R (to) - дифференциального отрицательного сопротивления элемента с вольт-амперной характеристикой S-типа.
(to) - дифференциального отрицательного сопротивления элемента с вольт-амперной характеристикой S-типа.
В процессе работы изменяют выходное напряжение источника питания в соответствии с зависимостью
Е = Ео - ΔUвкл(to) , (8) и сопротивление токозадающего резистора в соответствии с зависимостью
R = Ro +  R
R (to), (9) где Ео и Rо - напряжение источника питания и сопротивление токозадающего резистора при нормальной температуре соответственно ΔUвкл(to) и
(to), (9) где Ео и Rо - напряжение источника питания и сопротивление токозадающего резистора при нормальной температуре соответственно ΔUвкл(to) и  R
R (to) - модули отклонений напряжения включения и дифференциального сопротивления элемента с ВАХ S-типа от нормальных значений соответственно.
(to) - модули отклонений напряжения включения и дифференциального сопротивления элемента с ВАХ S-типа от нормальных значений соответственно.
Подача на шину питания линейно уменьшающегося с повышением температуры питающего напряжения и увеличение сопротивления токозадающего резистора позволяют повысить температурную стабильность активных индуктивностей, выполненных на элементах с ВАХ S-типа. Объясняется это тем, что с повышением температуры напряжение на переходе база-эмиттер транзисторов уменьшается, в результате чего они открываются, согласно формуле (3), при меньшем питающем напряжении. Поэтому уменьшение напряжения питания вызывает призакрывание транзисторов, формирующих S-образную ВАХ. Это равносильно перемещению ВАХ S-типа вправо вдоль оси напряжений, т.е. компенсации дрейфа. При этом уменьшение (с повышением температуры) напряжения питания и увеличение сопротивления резистора Rо приводит к сохранению линейного режима работы и обеспечению стабильности величины индуктивности в широком температурном диапазоне. Несмотря на одновременный дрейф абсолютной величины отрицательного дифференциального сопротивления  R
R и сопротивления резистора ΔRo, задающего положение рабочей точки, их отношение не меняется (Δζ=0). Это является необходимым условием температурной стабилизации активных индуктивностей, выполненных на элементах с ВАХ S-типа.
и сопротивления резистора ΔRo, задающего положение рабочей точки, их отношение не меняется (Δζ=0). Это является необходимым условием температурной стабилизации активных индуктивностей, выполненных на элементах с ВАХ S-типа.
Сравнение предложенного решения с прототипом позволило установить соответствие критерию "новизна". При изучении других известных технических решений признаки, отличающие заявляемое решение от прототипа, выявлены не были. Это обеспечивает соответствие критерию "существенные отличия".
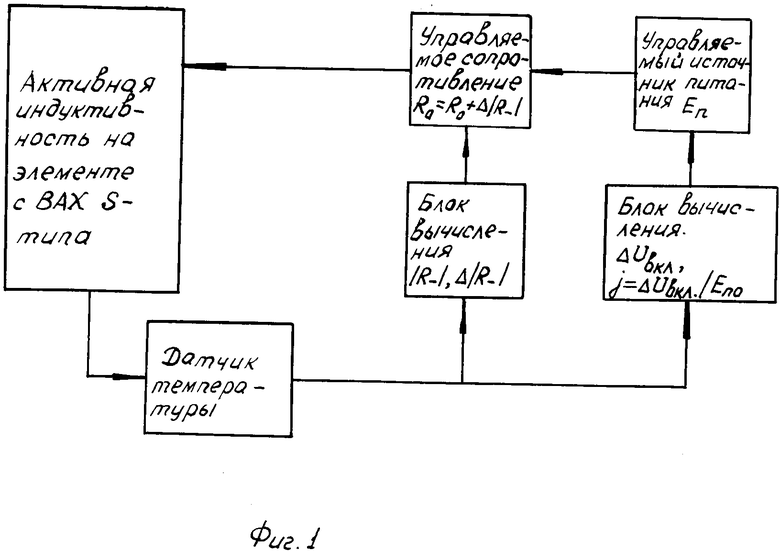
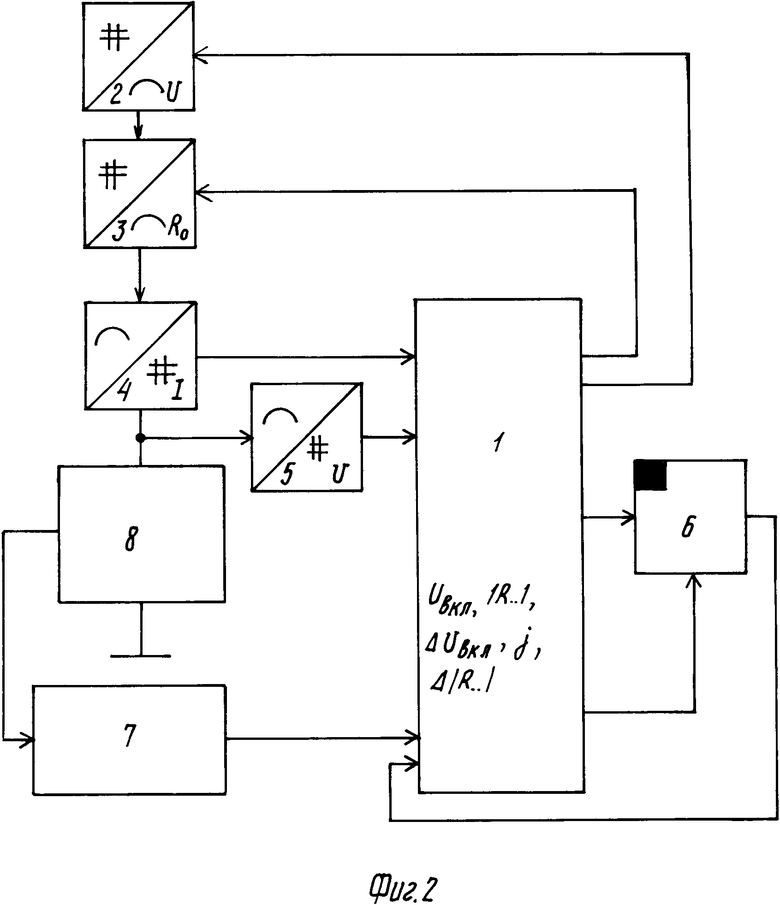
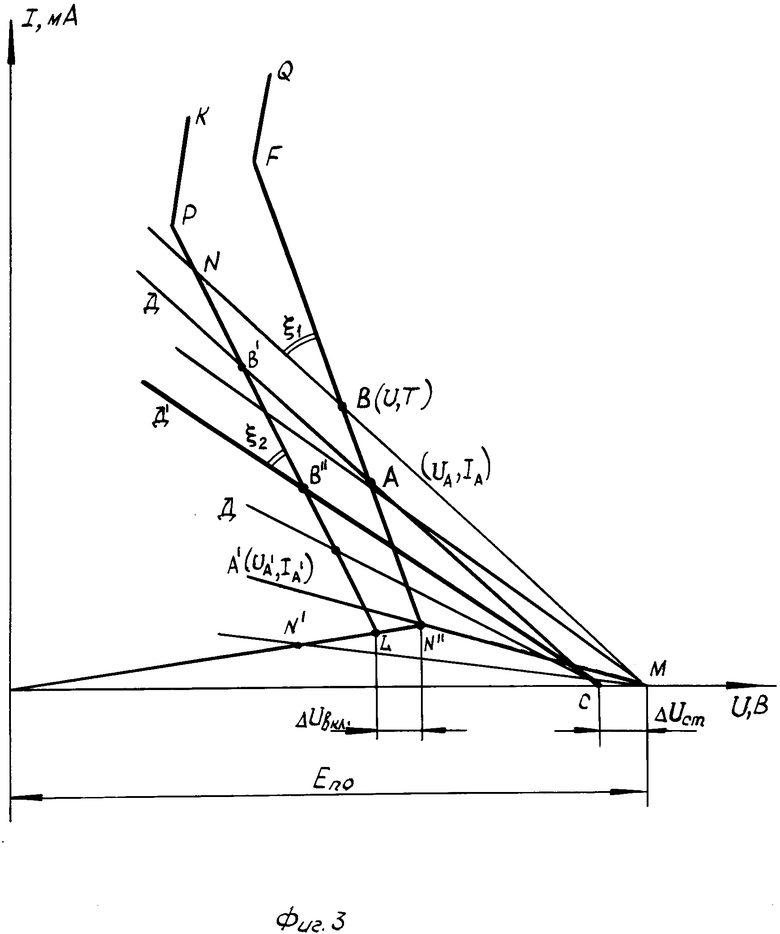
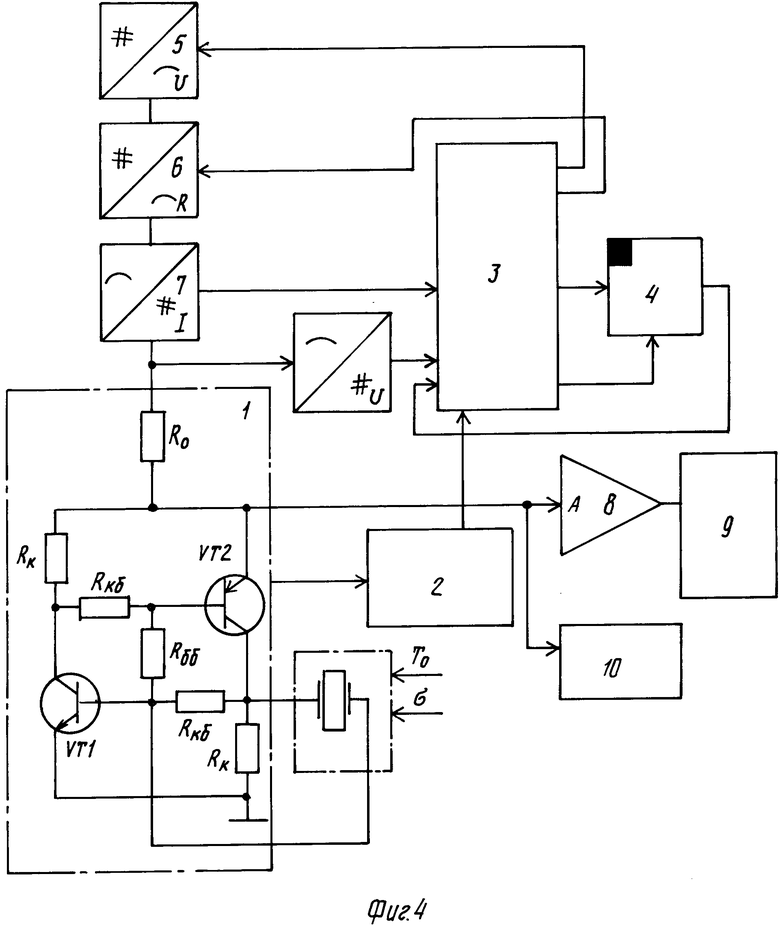
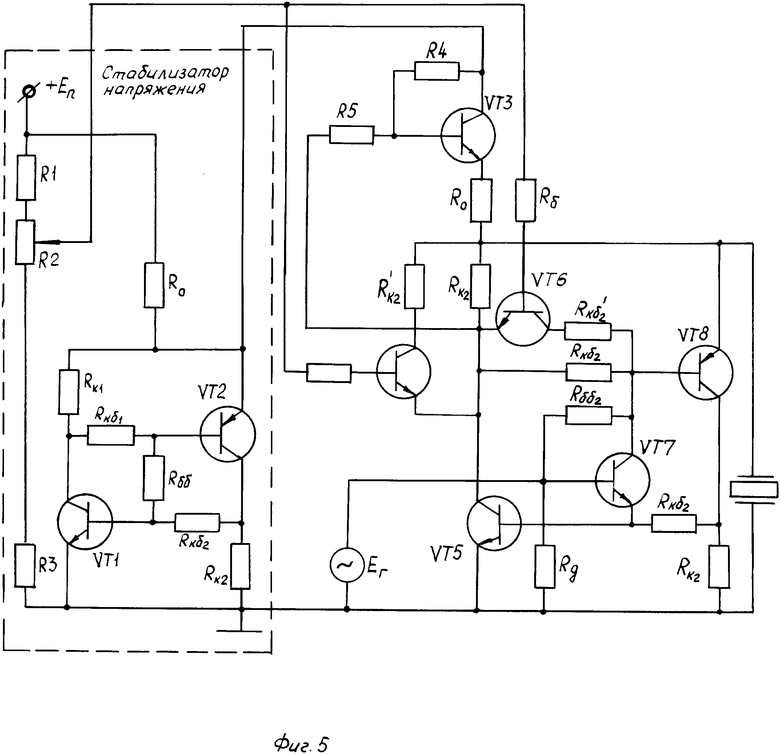
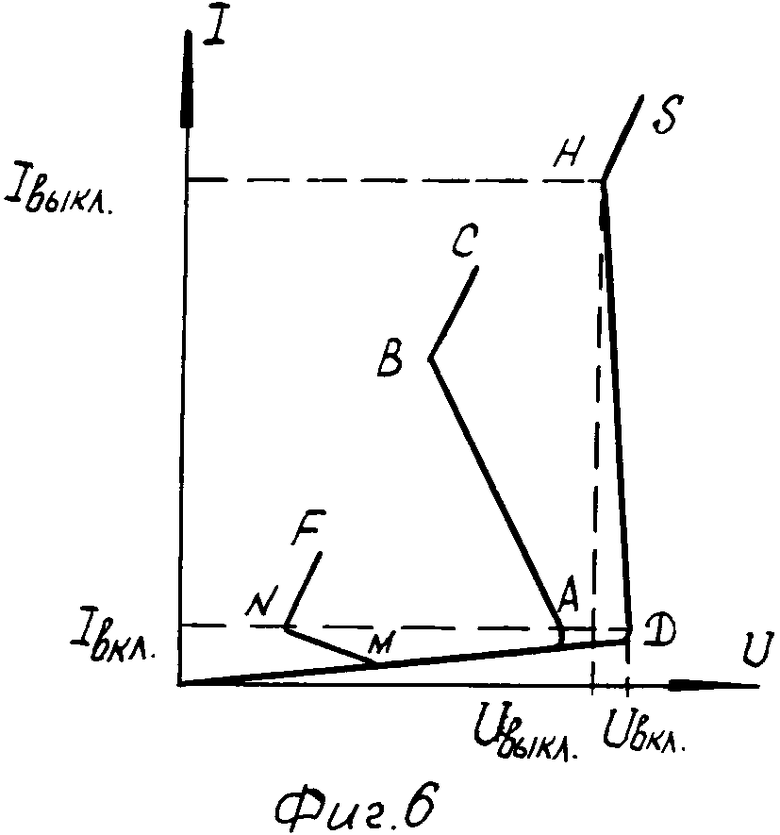
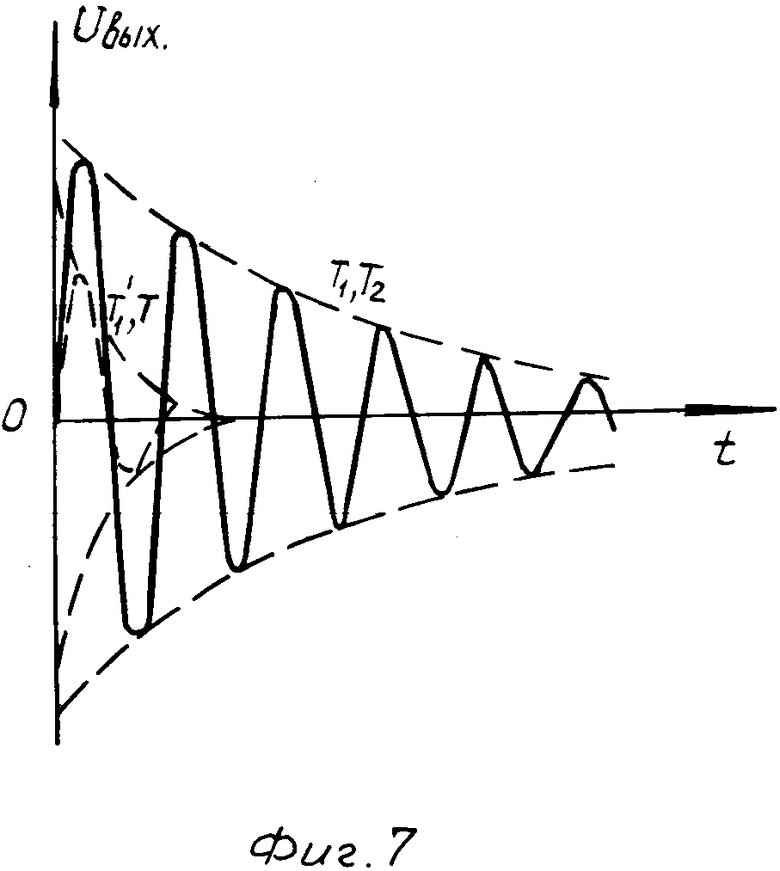
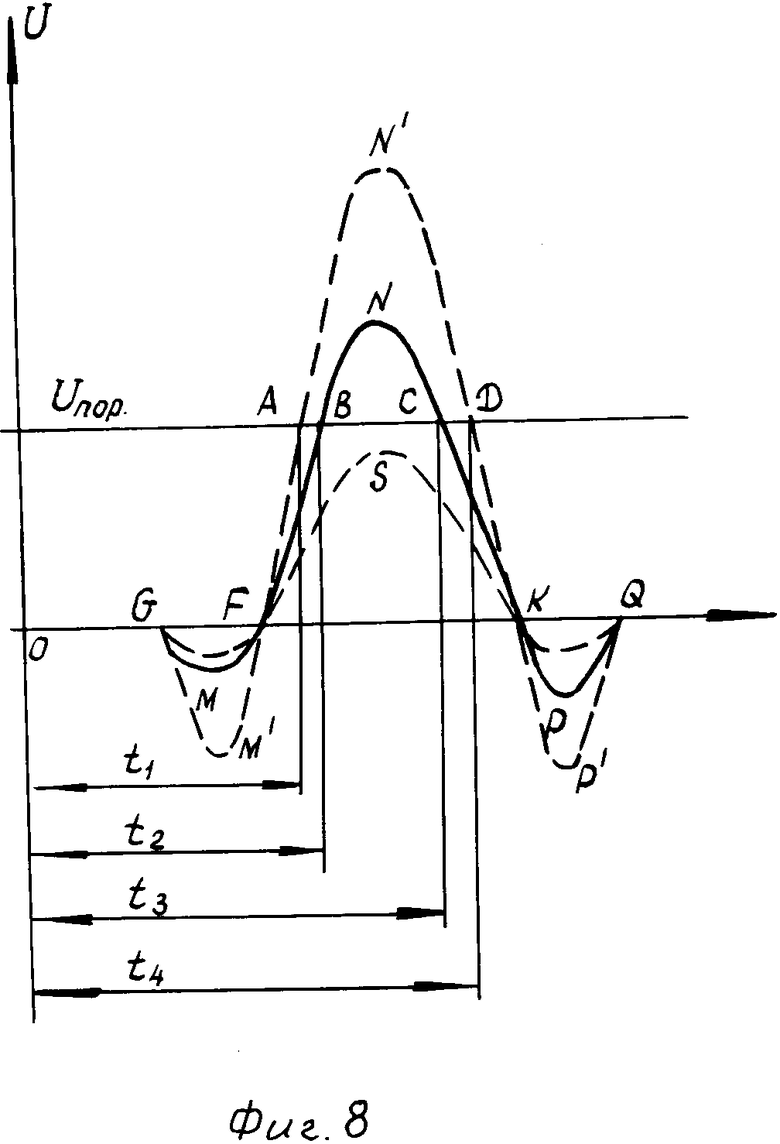
На фиг. 1 приведена структурная схема, поясняющая способ; на фиг. 2 - функциональная схема; на фиг. 3 показаны ВАХ S-типа ON'ABFQ и токозадающего резистора Rо (прямая MN) при начальной температуре То (в частности, То= 20оС) и при температуре Т=То+ ΔТ, при которой ВАХ S-типа занимает положение OLA'B'PK; на фиг. 4 - функциональная схема устройства для контроля качества изделий, выполненного на основе термостабилизированной индуктивности; на фиг. 5 - схема термостабилизированной активной индуктивности в качестве демпфирующего устройства для гашения паразитных колебаний пьезопреобразователей; на фиг. 6 приведены ВАХ S-типа, поясняющие работу устройства, изображенного на фиг. 5; на фиг. 7 - вид выходного сигнала пьезопреобразователя для различных постоянных времени Т1, Т2; на фиг. 8 показано влияние стабильности амплитуды выходного сигнала пьезопреобразователя на временную погрешность Δt.
Способ осуществляется следующим образом.
Первая стадия. При начальной температуре То производится измерение напряжения включения Uвкл устройства с ВАХ S-типа, на котором построена активная индуктивность, а также измеряется величина отрицательного дифференциального сопротивления  R
R . Для этого сигналом с выхода вычислительно-управляющего блока 1 производится установка начального питающего напряжения Епо (см. фиг. 3), которая осуществляется цифроаналоговым преобразователем (ЦАП) напряжения 2 (см. фиг. 2). Далее сигналом с выхода вычислительно-управляющего устройства 1 производится изменение сопротивления токозадающего резистора Rо, которое осуществляется ЦАП сопротивления 3. В результате этого производится сканирование ВАХ S-типа (см. фиг. 3). С выхода аналого-цифрового преобразователя тока 4 (АЦП) и аналого-цифрового преобразователя 5 (АЦП)U напряжения текущие значения кодовых эквивалентов тока I и напряжения U подаются на входы вычислительно-управляющего блока 1. Вычислительно-управляющим блоком 1 производится их анализ с целью определения напряжения включения Uвкл. После определения напряжения включения Uвкл его кодовый эквивалент передается в блок памяти 6. После этого (для перемещения рабочей точки из положения N'' в точки А и В) на ВАХ S-типа ON''ABFQ по сигналам из вычислительно-управляющего блока 1 осуществляется увеличение сопротивления токозадающего резистора Rо, которое производится ЦАПR сопротивления 3. Кодовые эквиваленты тока IA и напряжения UA по сигналу с вычислительно-управляющего устройства 1 анализируются (с точки зрения принадлежности их участку ВАХ, где устройство обладает отрицательным дифференциальным сопротивлением
. Для этого сигналом с выхода вычислительно-управляющего блока 1 производится установка начального питающего напряжения Епо (см. фиг. 3), которая осуществляется цифроаналоговым преобразователем (ЦАП) напряжения 2 (см. фиг. 2). Далее сигналом с выхода вычислительно-управляющего устройства 1 производится изменение сопротивления токозадающего резистора Rо, которое осуществляется ЦАП сопротивления 3. В результате этого производится сканирование ВАХ S-типа (см. фиг. 3). С выхода аналого-цифрового преобразователя тока 4 (АЦП) и аналого-цифрового преобразователя 5 (АЦП)U напряжения текущие значения кодовых эквивалентов тока I и напряжения U подаются на входы вычислительно-управляющего блока 1. Вычислительно-управляющим блоком 1 производится их анализ с целью определения напряжения включения Uвкл. После определения напряжения включения Uвкл его кодовый эквивалент передается в блок памяти 6. После этого (для перемещения рабочей точки из положения N'' в точки А и В) на ВАХ S-типа ON''ABFQ по сигналам из вычислительно-управляющего блока 1 осуществляется увеличение сопротивления токозадающего резистора Rо, которое производится ЦАПR сопротивления 3. Кодовые эквиваленты тока IA и напряжения UA по сигналу с вычислительно-управляющего устройства 1 анализируются (с точки зрения принадлежности их участку ВАХ, где устройство обладает отрицательным дифференциальным сопротивлением  R
R ) и далее запоминается в блоке памяти 6. Затем аналогичные действия повторяются для точки В. После этого по сигналу с вычислительно-управляющего устройства 1 кодовые эквиваленты токов IA, IBи напряжений UA, UB из блока памяти 6 поступают на вход вычислительно-управляющего блока 1, который вычисляет отрицательное дифференциальное сопротивление
) и далее запоминается в блоке памяти 6. Затем аналогичные действия повторяются для точки В. После этого по сигналу с вычислительно-управляющего устройства 1 кодовые эквиваленты токов IA, IBи напряжений UA, UB из блока памяти 6 поступают на вход вычислительно-управляющего блока 1, который вычисляет отрицательное дифференциальное сопротивление  R
R при начальной температуре То по формуле (4). После этого кодовый эквивалент отрицательного дифференциального сопротивления
при начальной температуре То по формуле (4). После этого кодовый эквивалент отрицательного дифференциального сопротивления  R
R записывается в блок памяти 6. От датчика температуры 7 на вход вычислительно-управляющего устройства поступает сигнал, пропорциональный температуре окружающей среды, и затем записывается в блок памяти 6. При изменении температуры окружающей среды на ΔТ градусов
записывается в блок памяти 6. От датчика температуры 7 на вход вычислительно-управляющего устройства поступает сигнал, пропорциональный температуре окружающей среды, и затем записывается в блок памяти 6. При изменении температуры окружающей среды на ΔТ градусов
Т = То + ΔТ ВАХ S-типа смещается вдоль оси напряжений влево с изменением отрицательного дифференциального сопротивления и занимает положение OA'B''B'PK (см. фиг. 3). После этого вычислительно-управляющим блоком 1 определяется (аналогично изложенному выше) напряжение включения UвклТэлемента с ВАХ S-типа при температуре Т=То+ ΔТ. На следующем этапе из блока памяти 6 информация о напряжении включения Uвкл при начальной температуре передается в вычислительно-управляющий блок 1, который определяет величину дрейфа напряжения включения ΔUвклпо формуле
ΔUвкл = Uвклo-UвклT.
Вторая стадия. Кодовый эквивалент, пропорциональный дрейфу напряжения включения ΔUвкл, запоминается в блоке памяти 6 и из блока памяти 6 подается в вычислительно-управляющий блок 1. По сигналу, сформированному вычислительно-управляющим блоком 1, производится уменьшение питающего напряжения Епо на величину ΔUвкл в блоке ЦАПu напряжения 2
Еп = Епо - ΔUвкл = Епо(1- j), где γ=  - коэффициент. После этого вычислительно-управляющим блоком 1 формируется сигнал, подаваемый на вход разрешения записи блока памяти 6, и производится запись кодовых эквивалентов тока IA' и напряжения UA'. Затем сигналом управления с выхода вычислительно-управляющего блока 1, подаваемого на ЦАП 3, изменяется сопротивление Ro токозадающего резистора и рабочая точка перемещается в положение B'. В вычислительно-управляющий блок 1 передаются кодовые эквиваленты тока IB' и напряжения UB' и далее записываются в блоке памяти 6. Затем по сигналу с выхода вычислительно-управляющего устройства 1 кодовые эквиваленты токов IA', IB' и напряжений UA', UB' из блока памяти 6 подаются на выход вычислительно-управляющего блока 1, в котором определяется величина отрицательного дифференциального сопротивления
- коэффициент. После этого вычислительно-управляющим блоком 1 формируется сигнал, подаваемый на вход разрешения записи блока памяти 6, и производится запись кодовых эквивалентов тока IA' и напряжения UA'. Затем сигналом управления с выхода вычислительно-управляющего блока 1, подаваемого на ЦАП 3, изменяется сопротивление Ro токозадающего резистора и рабочая точка перемещается в положение B'. В вычислительно-управляющий блок 1 передаются кодовые эквиваленты тока IB' и напряжения UB' и далее записываются в блоке памяти 6. Затем по сигналу с выхода вычислительно-управляющего устройства 1 кодовые эквиваленты токов IA', IB' и напряжений UA', UB' из блока памяти 6 подаются на выход вычислительно-управляющего блока 1, в котором определяется величина отрицательного дифференциального сопротивления  R
R при температуре Т=То+ ΔТ
при температуре Т=То+ ΔТ R
R =
=  (10) После этого в вычислительно-управляющем блоке 1 определяется дрейф отрицательного дифференциального сопротивления
(10) После этого в вычислительно-управляющем блоке 1 определяется дрейф отрицательного дифференциального сопротивления  R
R . Для этого из блока памяти 6 в вычислительно-управляющий блок 1 поступает кодовый эквивалент отрицательного дифференциального сопротивления
. Для этого из блока памяти 6 в вычислительно-управляющий блок 1 поступает кодовый эквивалент отрицательного дифференциального сопротивления  R
R при температуре То и производится вычисление дрейфа
при температуре То и производится вычисление дрейфа  R
R отрицательного дифференциального сопротивления по формуле
отрицательного дифференциального сопротивления по формуле R
R =
=  R
R -
-  R
R (11) Этот кодовый эквивалент дрейфа
(11) Этот кодовый эквивалент дрейфа  R
R отрицательного дифференциального сопротивления запоминается в блоке памяти 6 и затем поступает на вход вычислительно-управляющего блока 1, который формирует сигнал, подаваемый на ЦАПR3 резистора R и увеличивает его сопротивление на
отрицательного дифференциального сопротивления запоминается в блоке памяти 6 и затем поступает на вход вычислительно-управляющего блока 1, который формирует сигнал, подаваемый на ЦАПR3 резистора R и увеличивает его сопротивление на  R
R по закону
по закону
R = Ro +  R
R На фиг. 3 ВАХ сопротивления Rо переходит из положения B' в положение B''. При этом углы ζ1 = ζ2, т.е. осуществлена термокомпенсация дрейфа активной индуктивности ΔLэ( ω). Следует подчеркнуть, что разделение способа на две стадии в работе устройства необходимо только при больших температурных изменениях, когда дрейфовые параметры ΔUвкл(to),
На фиг. 3 ВАХ сопротивления Rо переходит из положения B' в положение B''. При этом углы ζ1 = ζ2, т.е. осуществлена термокомпенсация дрейфа активной индуктивности ΔLэ( ω). Следует подчеркнуть, что разделение способа на две стадии в работе устройства необходимо только при больших температурных изменениях, когда дрейфовые параметры ΔUвкл(to),  R
R (to) нелинейны. При небольших температурных вариациях достаточно работать в основном во второй стадии.
(to) нелинейны. При небольших температурных вариациях достаточно работать в основном во второй стадии.
В качестве управляемого источника напряжения (на фиг. 2 обозначен блоком 2) и управляемого сопротивления резистора Rо, задающего положение рабочей точки (на фиг.2 обозначен блоком 3) могут быть использованы цифро-аналоговые преобразователи КР572ПА2. В качестве АЦПIтока и АЦПU напряжения (на фиг. 2 обозначены блоками 4, 5) могут быть применены АЦП типа К572ПВ2. Вычислительно-управляющий блок (на фиг. 2 обозначен блоком 1) осуществляет функцию вычисления (определяет дрейф напряжения включения ΔUвкл, дрейф отрицательного дифференциального сопротивления  R
R ), а также формирует управляющие сигналы для управления ЦАПU напряжения и ЦАПR сопротивления. Блок памяти 6 осуществляет хранение начальных значений напряжения включения Uвкло и отрицательного дифференциального сопротивления
), а также формирует управляющие сигналы для управления ЦАПU напряжения и ЦАПR сопротивления. Блок памяти 6 осуществляет хранение начальных значений напряжения включения Uвкло и отрицательного дифференциального сопротивления  R
R , а также их дрейф ΔUвкло
, а также их дрейф ΔUвкло R
R . Блок памяти 6 и вычислительно-управляющий блок 1 могут быть выполнены на однокристальной микроЭВМ серии КР1816. В качестве транзисторов, на которых построена активная индуктивность, могут использоваться кремниевые транзисторы типа КТ3120, КТ315, КТ361.
. Блок памяти 6 и вычислительно-управляющий блок 1 могут быть выполнены на однокристальной микроЭВМ серии КР1816. В качестве транзисторов, на которых построена активная индуктивность, могут использоваться кремниевые транзисторы типа КТ3120, КТ315, КТ361.
При теплопрочностных испытаниях авиационных конструкций осуществляется комплексное воздействие силовых нагрузок и тепловых полей на исследуемую конструкцию. Устройство, показанное на фиг. 4, является многофункциональным преобразователем для работы с многопараметровыми сегнетоэлектрическими пьезодатчиками. Пьезопреобразователи обладают емкостным характером реактивности и являются датчиками генераторного типа. При прочностных испытаниях на поверхность контролируемого объекта помещают пьезодатчик. Под воздействием деформаций происходит изменение емкости преобразователя за счет изменения расстояния между электродами и диэлектрической проницаемости ε:
C= εεo , где F - площадь пластины датчика. Пьезопреобразователь как сегнетоэлектрик обладает зависимостью диэлектрической проницаемости (следовательно, и емкости датчика) от температуры. Это позволяет создавать на их основе емкостные датчики температуры. В функциональном преобразователе (см. фиг. 4) предусмотрен двухтактный режим работы. В первом такте устройство работает в усилительном режиме, в котором осуществляется регистрация сигналов, связанных с пьезоактивностью (например, сигналов акустической эмиссии, характеризующих продвижение трещины по конструкции). Во втором такте преобразователь работает в режиме генерации и осуществляет измерение температуры исследуемого объекта. Известно, что для работы в усилительном режиме должно выполняться неравенство вида:
, где F - площадь пластины датчика. Пьезопреобразователь как сегнетоэлектрик обладает зависимостью диэлектрической проницаемости (следовательно, и емкости датчика) от температуры. Это позволяет создавать на их основе емкостные датчики температуры. В функциональном преобразователе (см. фиг. 4) предусмотрен двухтактный режим работы. В первом такте устройство работает в усилительном режиме, в котором осуществляется регистрация сигналов, связанных с пьезоактивностью (например, сигналов акустической эмиссии, характеризующих продвижение трещины по конструкции). Во втором такте преобразователь работает в режиме генерации и осуществляет измерение температуры исследуемого объекта. Известно, что для работы в усилительном режиме должно выполняться неравенство вида:
Ro>  R
R (12) Изменение знака неравенства (12) и перевод устройства из одного режима работы в другой осуществляется за счет вариации сопротивления токозадающего резистора Rо. Это осуществляется вычислительно-управляющим блоком 3, который изменяет сопротивление R с помощью ЦАПR 6. Усиленный сигнал с выхода преобразователя на элементе с ВАХ S-типа поступает на основной усилитель 8 и далее в регистратор 9. После этого необходимо усиленный сигнал передать в блок определения координат (на фиг. 4 не показан) дефекта конструкции (например, усталостной трещины).
(12) Изменение знака неравенства (12) и перевод устройства из одного режима работы в другой осуществляется за счет вариации сопротивления токозадающего резистора Rо. Это осуществляется вычислительно-управляющим блоком 3, который изменяет сопротивление R с помощью ЦАПR 6. Усиленный сигнал с выхода преобразователя на элементе с ВАХ S-типа поступает на основной усилитель 8 и далее в регистратор 9. После этого необходимо усиленный сигнал передать в блок определения координат (на фиг. 4 не показан) дефекта конструкции (например, усталостной трещины).
При работе во втором такте с выхода вычислительно-управляющего устройства 3 задается другое значение кода, которое уменьшает сопротивление Ro ЦАПR 6, задающего положение рабочей точки. Приближение сопротивления Rо, задающего положение рабочей точке, к абсолютной величине отрицательного дифференциального сопротивления  R
R , вызывает неограниченное увеличение коэффициента усиления, определенного из выражения (7). При этом элемент с ВАХ S-типа переходит в режим генерации. Частота генерации f функционально связана с величиной емкости датчика Сд. Причем увеличение емкости датчика вызывает увеличение эквивалентной индуктивности Lэ(ω)
, вызывает неограниченное увеличение коэффициента усиления, определенного из выражения (7). При этом элемент с ВАХ S-типа переходит в режим генерации. Частота генерации f функционально связана с величиной емкости датчика Сд. Причем увеличение емкости датчика вызывает увеличение эквивалентной индуктивности Lэ(ω)
Lэ(ω)= Ro R
R Сдm, Приращение частоты генерации Δf, вызванное увеличением (или уменьшением) емкости датчика Сд за счет вариации температуры исследуемого объекта, измеряется частотомером 10. После этого цикл преобразования завершается. При изменении температуры окружающей среды на ΔТ градусов сигнал с выхода датчика температуры 2 поступает на вход вычислительно-управляющего блока 3. По сигналу управления с его выхода определяется напряжение включения Uвклт устройства с ВАХ S-типа при данной температуре, а также отрицательное дифференциальное сопротивление
Сдm, Приращение частоты генерации Δf, вызванное увеличением (или уменьшением) емкости датчика Сд за счет вариации температуры исследуемого объекта, измеряется частотомером 10. После этого цикл преобразования завершается. При изменении температуры окружающей среды на ΔТ градусов сигнал с выхода датчика температуры 2 поступает на вход вычислительно-управляющего блока 3. По сигналу управления с его выхода определяется напряжение включения Uвклт устройства с ВАХ S-типа при данной температуре, а также отрицательное дифференциальное сопротивление  R
R . В случае отклонения данных параметров от исходных, полученных при нормальной температуре То=20оС, осуществляют изменение питающего напряжения на величину дрейфа напряжения включения ΔUвкл с помощью ЦАПU 5 и изменение сопротивления токозадающего резистора с помощью ЦАПR 6 на величину дрейфа отрицательного дифференциального сопротивления
. В случае отклонения данных параметров от исходных, полученных при нормальной температуре То=20оС, осуществляют изменение питающего напряжения на величину дрейфа напряжения включения ΔUвкл с помощью ЦАПU 5 и изменение сопротивления токозадающего резистора с помощью ЦАПR 6 на величину дрейфа отрицательного дифференциального сопротивления  R
R .
.
С помощью данного устройства можно осуществлять одновременное измерение температуры и определять координаты продвигающейся трещины в конструкции. При теплопрочностных испытаниях современных материалов летательных аппаратов такие температуры могут составлять 800-900оС и при этом возникает проблема крепления тензодатчиков, окисление провода, из которого выполнен датчик и т.д. Устройство, показанное на фиг. 4, позволяет измерять две физические величины одним датчиком, который может либо напыляться, либо привариваться к исследуемой конструкции, что позволяет принципиально по-новому решать проблему теплопрочностных испытаний авиационных конструкций.
На фиг. 5 в качестве другого примера показано применение термостабилизированной активной электронно-управляемой индуктивности в качестве демпфирующего устройства в пьезопреобразователях. В отличие от схем на фиг. 2 и 4 термостабилизация активной индуктивности на фиг. 5 осуществляется непрерывно в аналоговом режиме за счет действия обратных связей. С повышением температуры напряжение на переходе база-эмиттер транзистора уменьшается
Uбэ= Uбэо- ε ˙ ΔТ, где Uбэо - напряжение на переходе база-эмиттер при температуре Т=20оС; ε=(2-3) мВ/град - скорость температурного дрейфа. В результате транзисторы включаются и выключаются при меньшем питающем напряжении, а ВАХ S-типа перемещается вдоль оси напряжений влево. Поскольку и стабилизатор напряжения (транзисторы VT1, VT2) и активная индуктивность (транзисторы VT3, VT6) выполнены на эквивалентах p-n-p-n-структуры, то они имеют практически одинаковый дрейф напряжения включения ΔUвкл(to). В результате этого питающее напряжение термостабилизированной индуктивности (являющееся выходным напряжением стабилизатора напряжения), автоматически отслеживает и компенсирует дрейф напряжения включения активного элемента индуктивности. Дрейф выходного напряжения эквивалента p-n-p-n-структуры подается на базу транзистора VT3 и призакрывает (либо приоткрывает) его, что приводит к соответствующим изменениям сопротивления перехода коллектор-эмиттер Rкэ3, а значит, и к изменениям сопротивления токозадающего резистора
R  =Ro+Rкэ3. Реальный пьезопреобразователь обладает емкостным характером реактивности, а в его выходном сигнале присутствуют паразитные колебания. Паразитные колебания подавляются за счет ускоренного разряда емкости пьезопреобразователя и поглощения энергии на активной составляющей
=Ro+Rкэ3. Реальный пьезопреобразователь обладает емкостным характером реактивности, а в его выходном сигнале присутствуют паразитные колебания. Паразитные колебания подавляются за счет ускоренного разряда емкости пьезопреобразователя и поглощения энергии на активной составляющей  R
R отрицательного дифференциального сопротивления:
отрицательного дифференциального сопротивления:
Z-(p)=- R
R +pLэ. В исходном состоянии транзисторы закрыты. Стабилизатор напряжения, выходное напряжение которого равно Uст - напряжению стабилизации, выполнен на двухполюснике с ВАХ S-типа, а активная индуктивность - на четырехполюснике с ВАХ S-типа. С повышением питающего напряжения открывается транзистор VТ7, в результате чего увеличивается его коллекторный и эмиттерный токи. При этом возрастает падение напряжения на этих резисторах Rк2, Rкб2. Как только падение напряжения на этих резисторах превысит напряжение открывания Uбэ транзисторов VT5, VT8, через резисторы Rкб2, замыкается положительная обратная связь (ПОС) по току. Перемещением движка переменного резистора R2 осуществляется изменение базовых токов транзисторов VT4, VT6 и дифференциального сопротивления переходов коллектор-эмиттер этих транзисторов Rкэ4, Rкэ6. Это приводит к изменению соотношения глубины положительных и отрицательных обратных связей, варьирование токами и напряжениями включения и выключения и отрицательным дифференциальным сопротивлением
+pLэ. В исходном состоянии транзисторы закрыты. Стабилизатор напряжения, выходное напряжение которого равно Uст - напряжению стабилизации, выполнен на двухполюснике с ВАХ S-типа, а активная индуктивность - на четырехполюснике с ВАХ S-типа. С повышением питающего напряжения открывается транзистор VТ7, в результате чего увеличивается его коллекторный и эмиттерный токи. При этом возрастает падение напряжения на этих резисторах Rк2, Rкб2. Как только падение напряжения на этих резисторах превысит напряжение открывания Uбэ транзисторов VT5, VT8, через резисторы Rкб2, замыкается положительная обратная связь (ПОС) по току. Перемещением движка переменного резистора R2 осуществляется изменение базовых токов транзисторов VT4, VT6 и дифференциального сопротивления переходов коллектор-эмиттер этих транзисторов Rкэ4, Rкэ6. Это приводит к изменению соотношения глубины положительных и отрицательных обратных связей, варьирование токами и напряжениями включения и выключения и отрицательным дифференциальным сопротивлением  R
R =
= (см. фиг. 6). Эквивалентная индуктивность Lэ(ω) устройства находится из выражения (6), из которого видно, что за счет изменения отрицательного сопротивления
(см. фиг. 6). Эквивалентная индуктивность Lэ(ω) устройства находится из выражения (6), из которого видно, что за счет изменения отрицательного сопротивления  R
R можно варьировать величиной эквивалентной индуктивности Lэ(ω). По теореме разложения определяется переходная хактеристика h(t) согласующего устройства
можно варьировать величиной эквивалентной индуктивности Lэ(ω). По теореме разложения определяется переходная хактеристика h(t) согласующего устройства
h(t)=K , (13) где
, (13) где 
 ;T2=
;T2=  - постоянные времени;
- постоянные времени;
Ко - коэффициент усиления;
P1,2= -  .
.
Из выражения (13) следует, что переходный процесс на выходе данного устройства апериодический. Таким образом, регулировкой отрицательного дифференциального сопротивления  R
R осуществляется подстройка под требуемую величину индуктивности Lэ(ω), при которой подавляется определенное число периодов паразитных колебаний. В реальных акустико-эмиссионных диагностических системах в качестве информационного параметра используется время прихода сигнала, а последующие резонансные колебания пьезодатчика являются паразитными, но также преобразуются системой (например, оцифровываются). В результате этого неэффективно используется время обработки массивов данных и память миниЭВМ. Для исключения паразитных колебаний параллельно пьезодатчику включают управляемую активность индуктивность, в которой осуществлено электронное управление величиной индуктивности. Температурные изменения приводят к дрейфу активной индуктивности, а значит изменению функций (6), (13) и амплитуды сигнала на выходе пьезодатчика (см. фиг. 8). Поскольку в реальных системах в качестве информационного параметра используется время прихода сигнала акустической эмиссии, то дрейф индуктивности, а значит и передаточной функции (11), приводит к тому, что выходной сигнал пьезодатчика будет либо меньше некоторой пороговой величины Uпор (см. фиг. 8) и тогда вообще не зафиксируется (т.е. произойдет потеря информации), либо зафиксируется с временной погрешностью Δt= t1-t2. Это означает, что системой будут с большой погрешностью определены координаты развивающейся трещины в конструкции.
осуществляется подстройка под требуемую величину индуктивности Lэ(ω), при которой подавляется определенное число периодов паразитных колебаний. В реальных акустико-эмиссионных диагностических системах в качестве информационного параметра используется время прихода сигнала, а последующие резонансные колебания пьезодатчика являются паразитными, но также преобразуются системой (например, оцифровываются). В результате этого неэффективно используется время обработки массивов данных и память миниЭВМ. Для исключения паразитных колебаний параллельно пьезодатчику включают управляемую активность индуктивность, в которой осуществлено электронное управление величиной индуктивности. Температурные изменения приводят к дрейфу активной индуктивности, а значит изменению функций (6), (13) и амплитуды сигнала на выходе пьезодатчика (см. фиг. 8). Поскольку в реальных системах в качестве информационного параметра используется время прихода сигнала акустической эмиссии, то дрейф индуктивности, а значит и передаточной функции (11), приводит к тому, что выходной сигнал пьезодатчика будет либо меньше некоторой пороговой величины Uпор (см. фиг. 8) и тогда вообще не зафиксируется (т.е. произойдет потеря информации), либо зафиксируется с временной погрешностью Δt= t1-t2. Это означает, что системой будут с большой погрешностью определены координаты развивающейся трещины в конструкции.
Таким образом осуществляется способ термостабилизации в активной индуктивности, которая применяется в рассмотренных выше устройствах. Эти устройства нашли применение в диагностических комплексах на основе акустической эмиссии, которые применяются для теплопрочностных и прочностных испытаний объектов авиационной и космической техники.
Изобретение относится к области электроники и может быть использовано в радиоэлектронных устройствах с управляемыми активными индуктивностями. Сущность изобретения: для повышения стабильности активной индуктивности изменения ВАХ от температуры активного элемента и, следовательно, изменения угла компенсируют, т.е. обеспечивают его малое изменение, за счет изменений R и E . Причем для адекватной компенсации по данному способу термостабилизации активности индуктивности выполняют следующие действия: на первой стадии определяют и запоминают /например с помощью устройств АЦП и ЭВМ/ зависимости от температуры Uвкл(t°) и /R-/(t°); на второй стадии /в рабочем режиме/ по информации о температуре объекта /активной индуктивности/ изменяют сопротивление токозадающего резистора и напряжение источника питания в соответствии с зависимостями E = Eo-ΔUвкл(t° ), R = Ro+Δ/R-/(t°), где Eo и Ro - напряжение источника питания и сопротивление токозадающего резистора при нормальной температуре; ΔUвкл(t° ) и Δ/R-/(t°) - модули отклонения напряжения включения и дифференциального отрицательного сопротивления ВАХ активного элемента от нормальных значений. 8 ил.
СПОСОБ ТЕРМОСТАБИЛИЗАЦИИ АКТИВНОЙ ИНДУКТИВНОСТИ, содержащей элемент с вольт-амперной характеристикой S-типа, токозадающий резистор и источник питания Е, заключающийся в компенсации тепловых изменений вольт-амперной характеристики элемента с вольт-амперной характеристикой (ВАХ) S-типа, отличающийся тем, что, с целью повышения температурной стабильности активной индуктивности, компенсацию тепловых изменений вольт-амперной характеристики элемента с ВАХ S-типа осуществляют путем определения и запоминания зависимости от температуры параметров: Uвкл(t°) - напряжения включения вольт-амперной характеристики /R-/(to) - дифференциального отрицательного сопротивления вольтамперной характеристики элемента с ВАХ S-типа, изменения в процессе работы выходного напряжения источника питания в соответствии с зависимостью: E = Eo-ΔUвкл(t°) и сопротивления токозадающего резистора в соответствии с зависимостью: R = Ro+ R-
R- (t°),, где E0 и R0 - напряжение источника питания и сопротивление токозадающего резистора при нормальной температуре соответственно, ΔUвкл(t°) и
(t°),, где E0 и R0 - напряжение источника питания и сопротивление токозадающего резистора при нормальной температуре соответственно, ΔUвкл(t°) и  R-
R- (t°) - модули отклонения напряжения включения и дифференциального отрицательного сопротивления вольт-амперной характеристики от нормальных значений соответственно.
(t°) - модули отклонения напряжения включения и дифференциального отрицательного сопротивления вольт-амперной характеристики от нормальных значений соответственно.
| Устройство с вольт-амперной характеристикой @ -типа | 1985 |
|
SU1290491A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
