Изобретение относится к космическим исследованиям, в частности к транспортным аппаратам, пилотируемым в атмосфере Земли и в космосе. Транспортный аппарат может быть использован для плавания в морской воде.
Известен транспортный аппарат, содержащий аэродинамически профилированный осесимметричный корпус с изоляционной и магнитопрозрачной оболочками, энергодвигательную установку, включающую электрогенерирующую систему, подключенные к ней проводящие элементы, образующие секционированную электромагнитную структуру, взаимодействующую с внешней средой, а также средства для создания реактивной тяги, содержащие элементы для хранения, ионизации и организации истечения рабочего тела по внешнюю среду.
Недостатками транспортного аппарата являются узкая область его применения, низкая маневренность и управляемость.
Цель изобретения - расширение области применения транспортного аппарата, повышение его маневренности и управляемости.
Это достигается тем, что в транспортном аппарате, содержащем аэродинамически профилированный осесимметричный корпус с изоляционной и магнитопрозрачной оболочками, энергодвигательную установку, включающую энергогенерирующую систему, подключенные к ней проводящие элементы, образующие секционированную электромагнитную структуру, вводимую во взаимодействие с внешней средой, а также средства для создания реактивной тяги, содержащие элементы для хранения, ионизации и организации истечения рабочего тела во внешнюю среду, энергодвигательная установка снабжена подключенными к энергогенерирующей системе электродами, параллельными участками проводящих элементов, расположенных в радиальных плоскостях по отношению к оси симметрии корпуса, а также магнитогидродинамическими преобразователями, связанными через коммутационные средства с электрогенерирующей системой и имеющими в качестве своих каналов элементы для организации истечения рабочего тела во внешнюю среду, причем проводящие элементы размещены между внутренней изоляционной и внешней магнитопрозрачной оболочками корпуса, а электроды установлены на внешней оболочке корпуса. Электрогенерирующая система снабжена маховичными аккумуляторами энергии, а электрогенераторы данной системы выполнены в виде обратимых электромашинных преобразователей с валами, кинематически связанными с валами маховичных аккумуляторов энергии, секции электромагнитной структуры выполнены в виде зигзагообразных изогнутых проводящих элементов, контуры которых замкнуты обмотками соленоидов, подключенных через коммутационные средства к электрогенерирующей системе и размещенных по периметру корпуса аппарата; каждый магнитогидродинамический преобразователь выполнен в виде последовательно расположенных приводного компрессора, связанного с окружающей средой, преобразователя топлива в ионизированное рабочее тело с электрогидравлическим разрядником, эжектирующего устройства, камера разрежения которого связана через автоматический перепускной клапан с отсеком маховичных аккумуляторов энергии, магнитогидродинамического канала с магнитной системой, соединенного с выходом эжектирующего устройства, и сопла. Проводящие элементы, обмотки электрогенераторов, соленоидов и обмотки магнитных систем магнитогидродинамических преобразователей выполнены сверхпроводящими. Аппарат снабжен ионизаторами внешней среды, взаимодействующей с магнитопрозрачной оболочкой корпуса, расположенными в верхней и нижней частях корпуса; аппарат снабжен топливным баком, связанным с преобразователями топлива в ионизированное рабочее тело и выполненным в виде полого секционированного по числу магнитогидродинамических преобразователей кольца и размещен в изоляционной оболочке симметрично относительно оси симметрии корпуса. Аппарат снабжен баком для воды, связанным с преобразователями топлива в ионизированное рабочее тело, выполненным в виде полого секционированного кольца и размещенным в изоляционной оболочке симметрично относительно оси симметрии корпуса. Изоляционная и магнитопрозрачная оболочки выполнены в виде полых дисков, верхние части которых имеют выпуклость, а нижние части - вогнутость, изоляционная и магнитопрозрачная оболочки по периметру соединены между собой полым кольцом для повышения прочности и размещения в нем соленоидов и части проводящих элементов секций электромагнитной структуры.
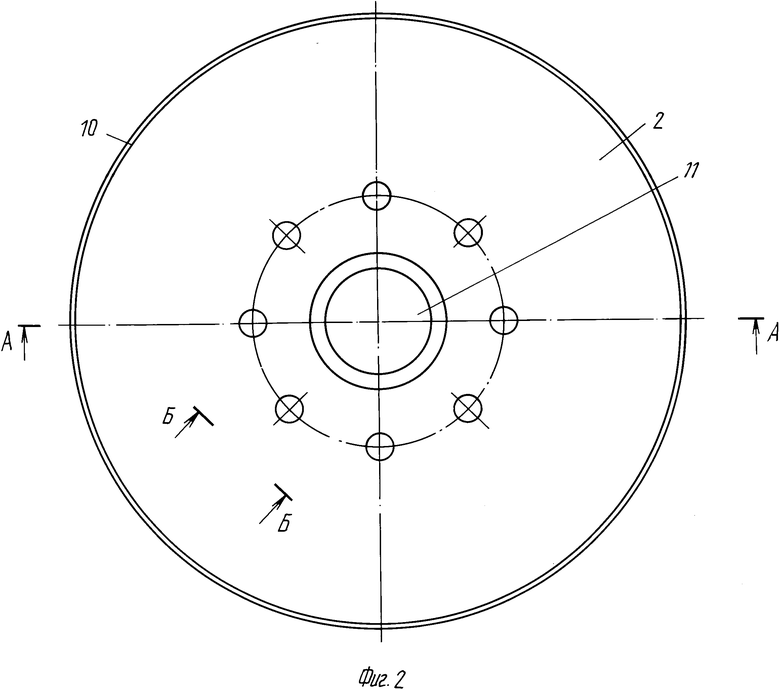
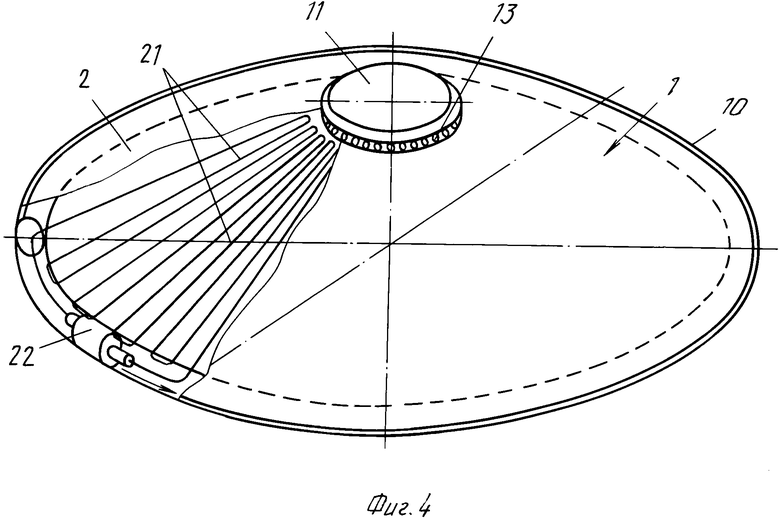
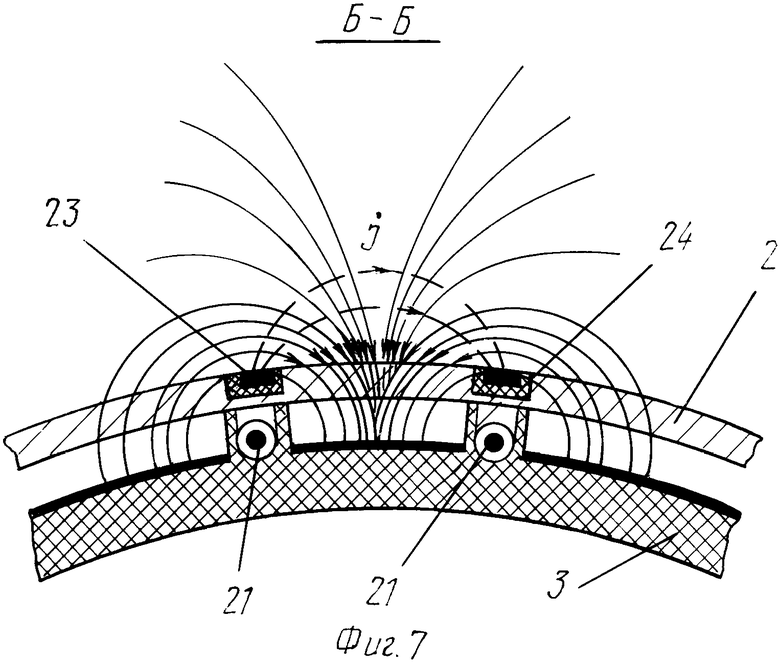
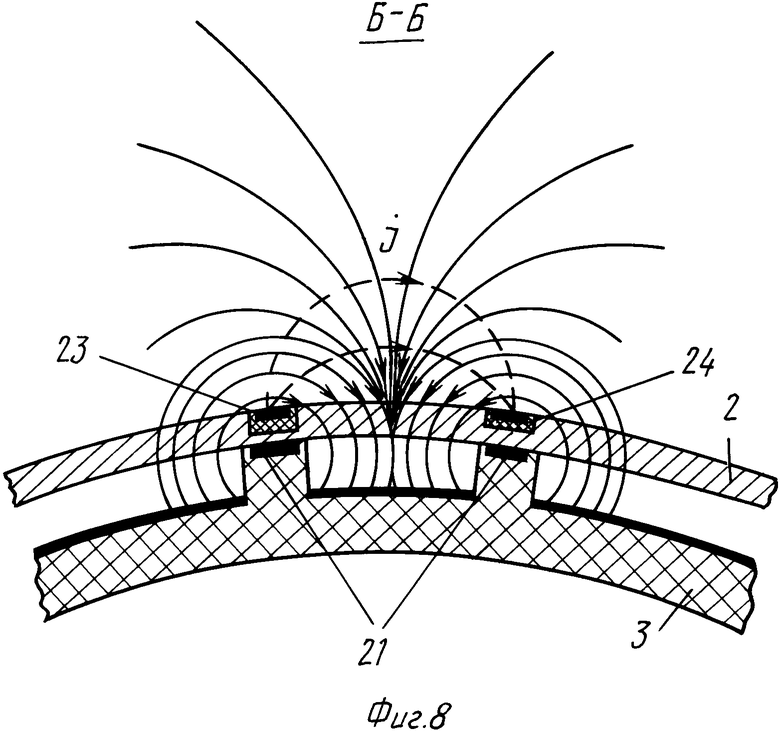
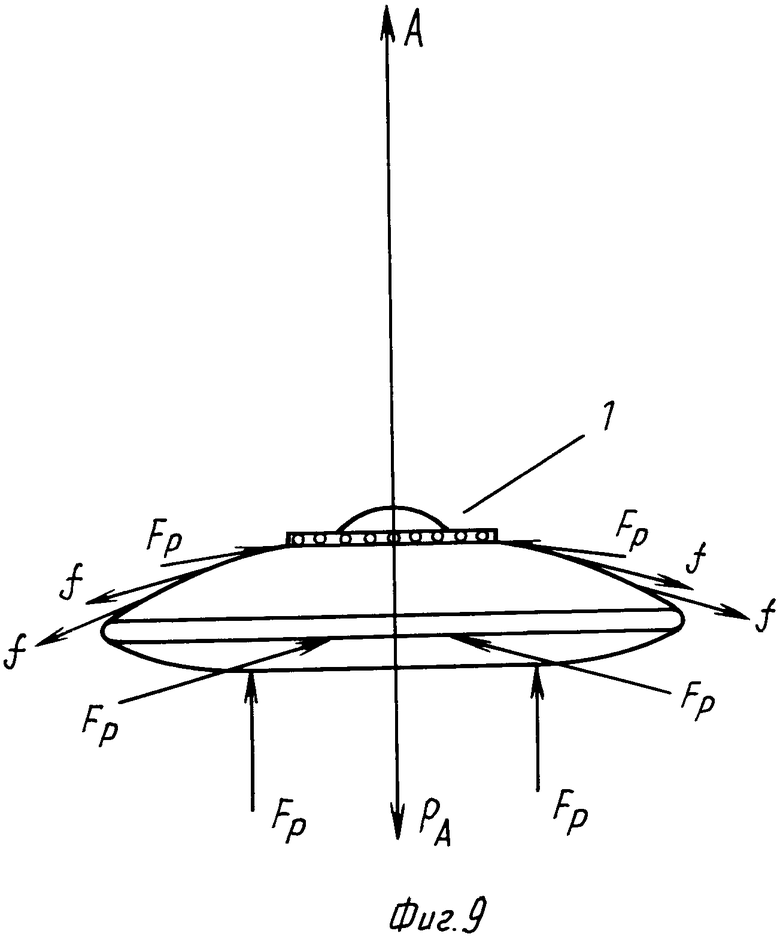
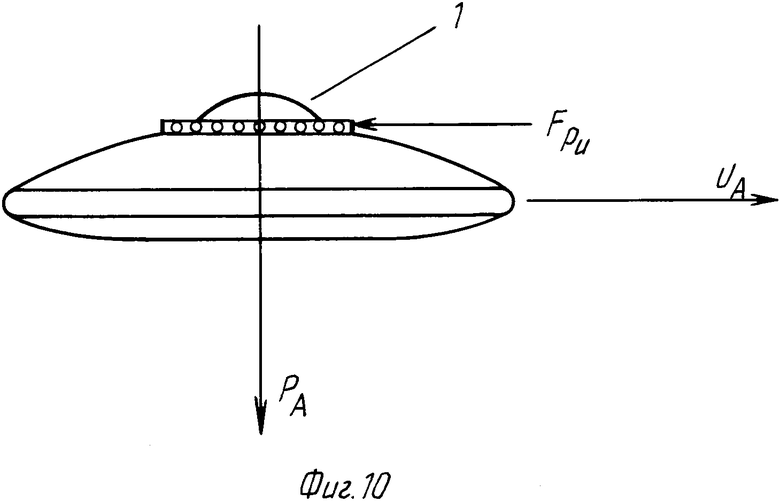
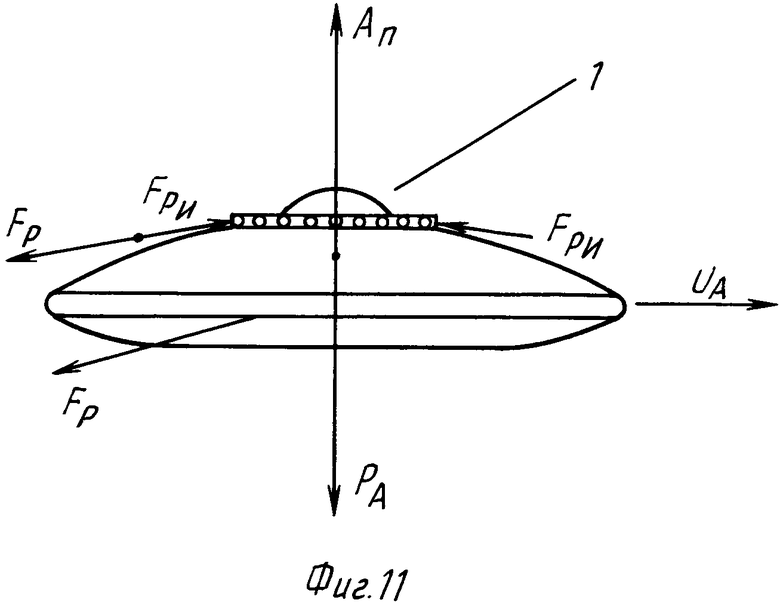
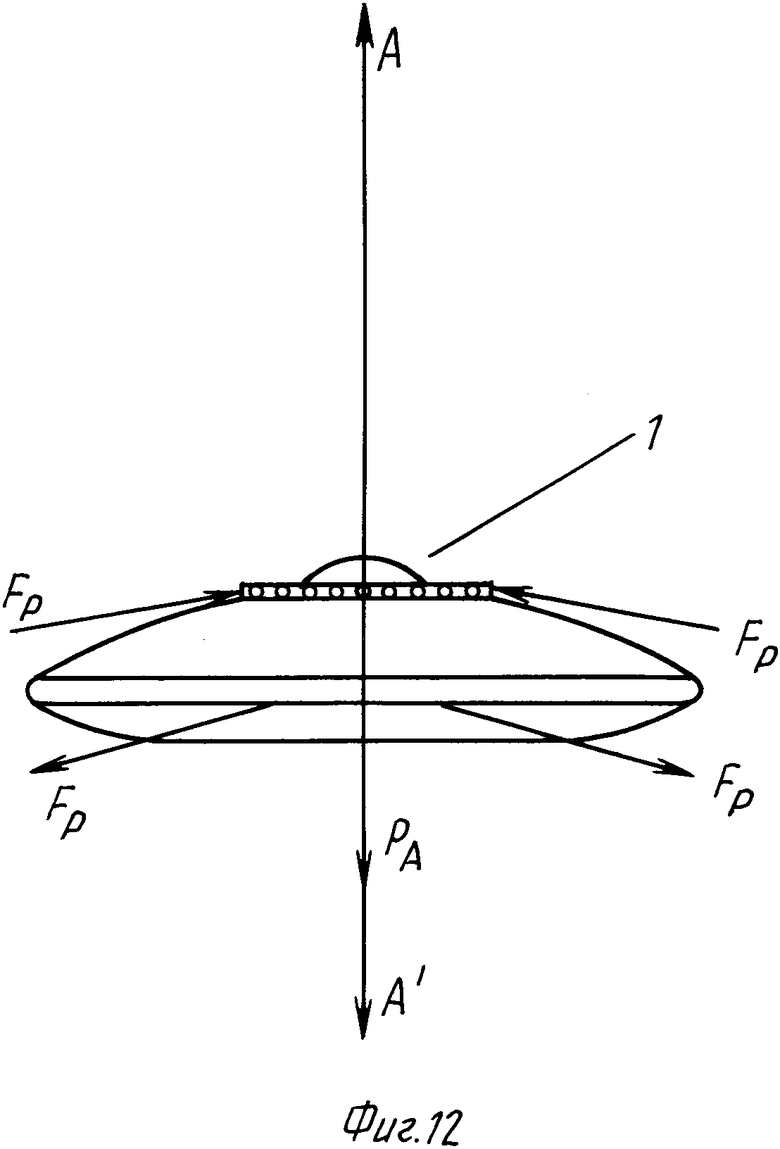
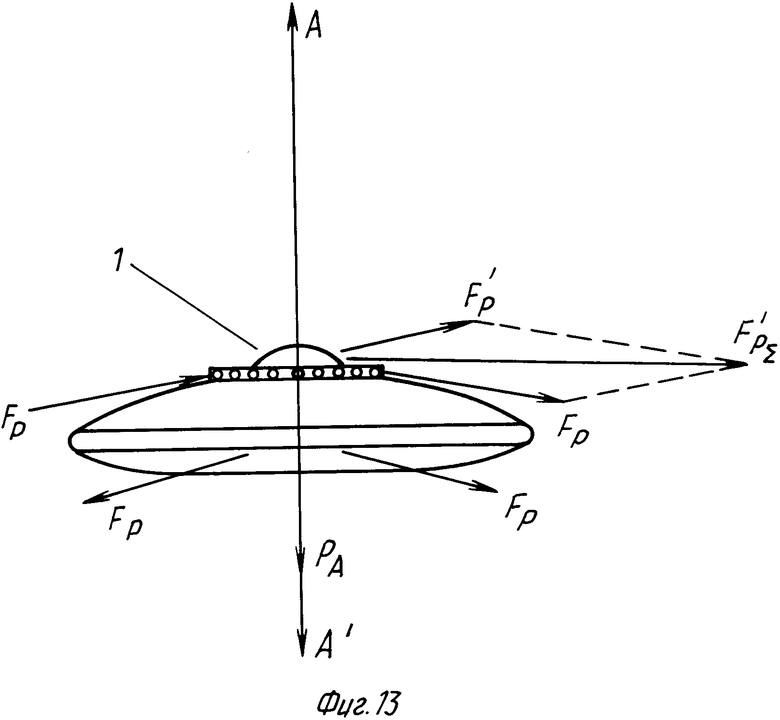
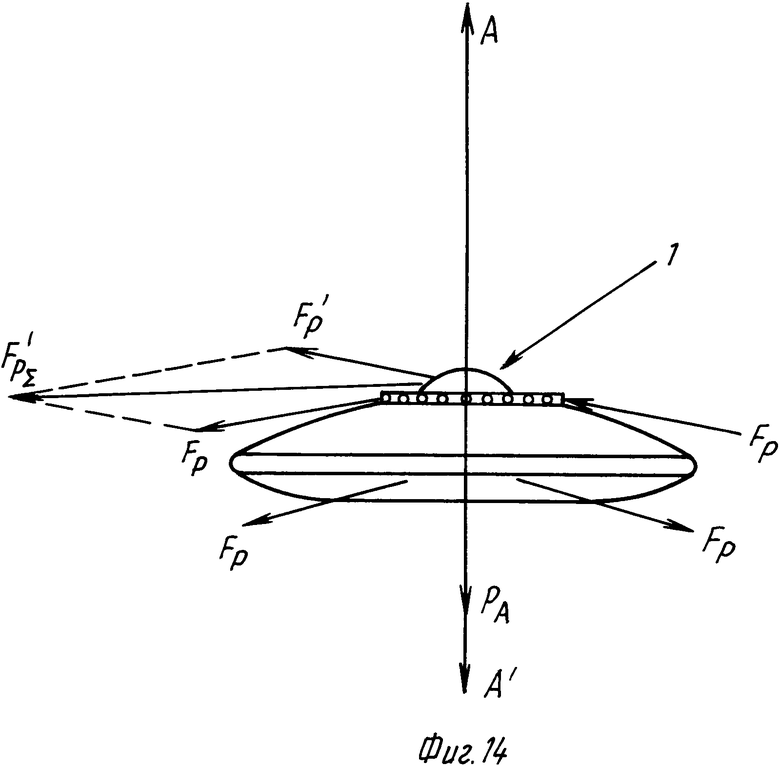
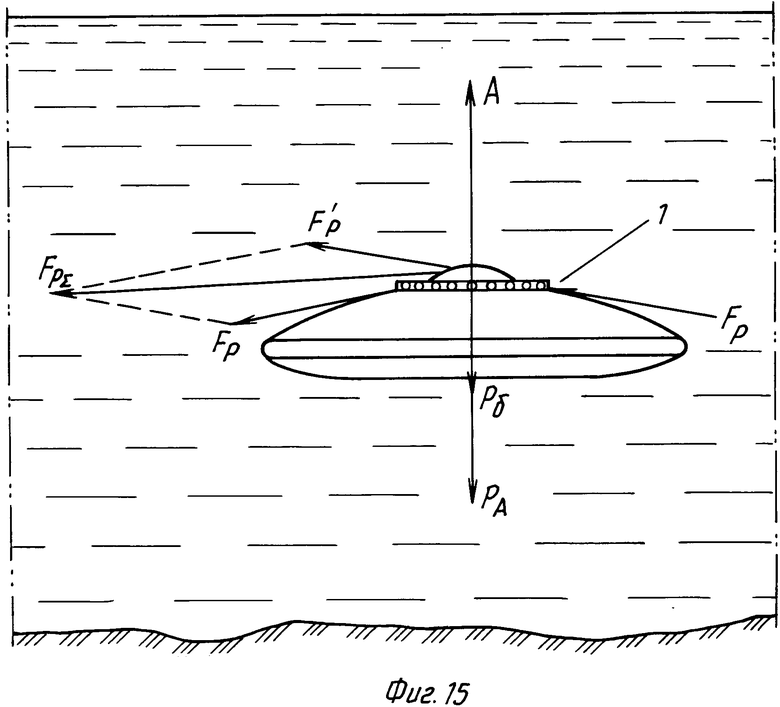
На фиг. 1 схематично изображен транспортный аппарат, общий вид; на фиг. 2 - то же, вид в плане; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - секция магнитной структуры, аксонометрия; на фиг. 5 - то же, магнитогидродинамический преобразователь, в увеличенном масштабе; на фиг. 6 - структурная схема управления секцией энергодвигательной установки; на фиг. 7 - сечение Б-Б на фиг. 2 (вид магнитного и электрического полей между двумя соседними электродами электромагнитной структуры); на фиг. 8 - вид другой модификации магнитного и электрического полей между двумя соседними электродами электромагнитной структуры; на фиг. 9 - схема расположения сил при старте и удалении аппарата от поверхности Земли; на фиг. 10 - иллюстрация расположения сил на I стадии торможения аппарата; на фиг. 11 - то же, на II стадии торможения аппарата; на фиг. 12 - то же, при зависании аппарата над поверхностью Земли; на фиг. 13 - то же, при движении аппарата из положения зависания; на фиг. 14 - то же, при изменении направления движения аппарата на 180о из положения зависания; на фиг. 15 - то же, при движении аппарата в морской воде.
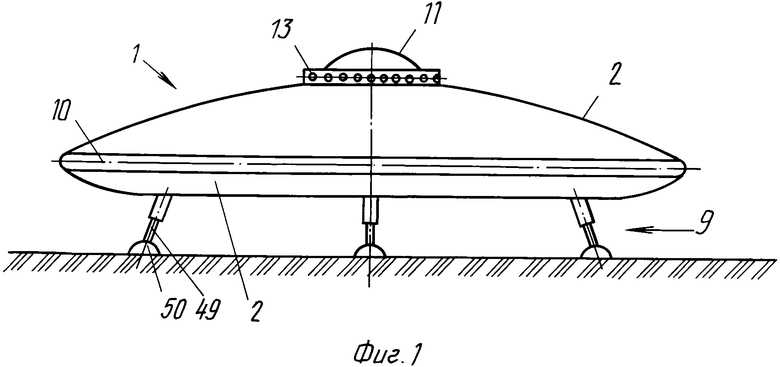
Транспортный аппарат 1 содержит аэродинамически профилированный осесимметричный с магнитопрозрачной 2 и изоляционной 3 оболочками корпус, энергодвигательную установку, включающую секционированную электромагнитную структуру 4, подключенную к электрогенерирующей системе 5, изолированную кабину 6 со средствами 7 и 8 жизнеобеспечения и управления аппаратом и устройство 9 для старта и посадки аппарата 1.
Магнитопрозрачная 2 и изоляционная 3 оболочки, образующие собственно корпус аппарата, выполнены в виде полых дисков, верхние поверхности которых имеют выпуклость, а нижние поверхности- вогнутость, обеспечивающие практически идеальный аэрогидродинамический профиль для движения в любой среде и любом направлении пространства.
Для повышения прочности корпуса магнитопрозрачная 2 и изоляционная 3 оболочки в диаметральной плоскости аппарата соединены полым кольцом 10. Магнитопрозрачная 2 и изоляционная 3 оболочки корпуса аппарата выполнены из специальных жаропрочных легких материалов, причем оболочка 2 изготовлена из прозрачного материала для магнитных полей, а оболочка 3 - из электромагнитно-изоляционного материала. В верхней части корпуса смонтирован аэрогидродинамический обтекатель 11, изготовленный из композиционного материала: прозрачного изнутри и непрозрачного снаружи к световым лучам. В нижней части корпуса смонтирован герметизированный люк 12. На периферии аэрогидродинамического обтекателя 11 и люка 12 смонтированы ионизаторы 13 внешней среды известной конструкции, например лазеры жесткого ультрафиолетового излучения (для ионизации внешней среды могут быть использованы рентгеновские лучи, γ-лучи). Ионизаторы 13 внешней среды предназначены для ионизации среды, взаимодействующей с магнитопрозрачной 2 оболочкой при движении аппарата 1 в пространстве.
Внутри изоляционной оболочки 3 смонтированы герметичные концентрические перегородки-переборки 14, 15, 16 с герметичными люками (не показаны) для повышения жесткости и прочности конструкции корпуса, образующие концентрические отсеки 17-20 для размещения оборудования аппарата 1. Люки предназначены для перемещения экипажа внутри аппарата 1 (не показаны). Отсеки 17 и 18 сообщаются с внешней средой посредством герметизированных устройств, например кингстонов (не показаны).
Секционированная электромагнитная структура 4 предназначена для изменения и регулирования скорости и направления аппарата и состоит из зигзагообразных изогнутых сверхпроводящих элементов 21, выполненных в виде проводников или кабелей, контуры каждой секции которых замкнуты сверхпроводящими обмотками соленоидов 22, и электродов 23, подключенных к электрогенерирующей системе 5.
Для обеспечения сверхпроводимости элементов 21 и соленоидов 22 используется, например, гелий. При изготовлении сверхпроводящих материалов, например, обладающих сверхпроводимостью при комнатной температуре, магнитная система может быть изготовлена, например, методом напыления материалов на изоляционную оболочку 3 корпуса, что сократит число проводящих элементов 21 в секции. Участки сверхпроводящих элементов 21 размещены между внутренней изоляционной 3 и внешней магнитопрозрачной 2 оболочками и расположены в радиальных плоскостях по отношению к оси симметрии корпуса. Сверхпроводящие соленоиды 22 с обмотками возбуждения расположены в полом кольце 10, сообщенные через специальные переходные устройства (не показаны) с сверхпроводящими элементами 21. Электроды 23 размещены параллельно участкам сверхпроводящих элементов 21 на поверхности магнитопрозрачной оболочки 2 корпуса и электроизолированы от нее. Для обеспечения обтекаемости аппарата электроды 23 проложены в канавках 24 магнитопрозрачной оболочки 2. Электромагнитная структура 4 взаимодействует с внешней средой. Количество секций электромагнитной структуры 4 аппарата предусматривается не менее восьми (по четырем секциям как в верхней, так и в нижней частях аппарата), а максимальное количество секций определяется в завимисости от способа использования и массы аппарата 1. В данной конструкции аппарата предусмотрено 16 секций, при этом нижние секции электромагнитной структуры смещены на 22,5о относительно верхних секций, что позволяет изменить курс движения с точностью 11,25о. При большом количестве секций курс движения возможно поддерживать с точностью 1о.
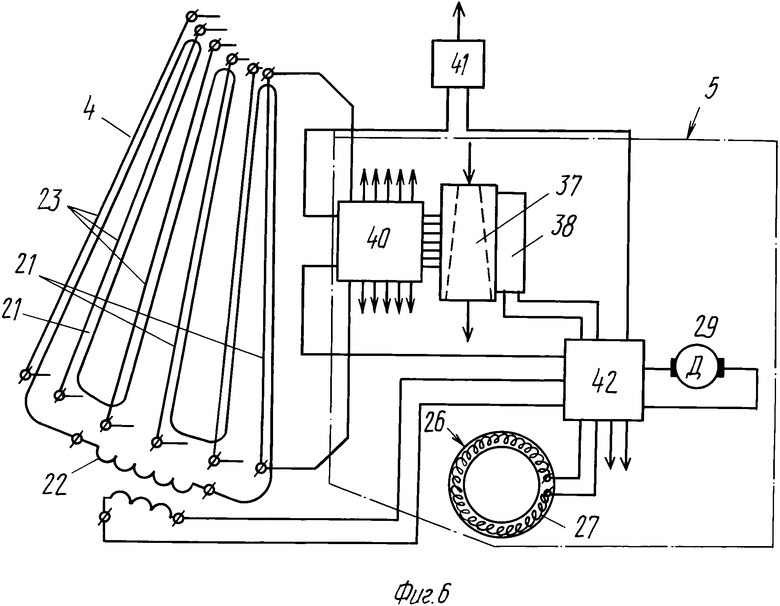
Электрогенерирующая система 5 энергодвигательной установки аппарата включает основные маховичные аккумуляторы 25 энергии, выполненные в виде супермаховиков, дополнительный аккумулятор 26 энергии, выполненный в виде сверхпроводящего кольцеобразного соленоида 27, размещенных в отсеке 20 под изолированной кабиной (ходовой рубкой) 6, магнитогидродинамические преобразователи 28 и электрогенераторы 29, выполненные в виде обратимых электромашинных преобразователей со сверхпроводящими обмотками, валы которых кинематически связаны с валами маховичных аккумуляторов 25 энергии.
Основные маховичные аккумуляторы 25 энергии выполнены с валами 30 вращения, ориентированными к оси симметрии аппарата 1, и расположены под изолированной кабиной 6. Количество супермаховиков соответствует количеству магнитогидродинамических преобразователей. Супермаховики 25 предназначены для стабилизации движения аппарата 1 за счет гироскопического эффекта и питания энергией электромагнитной структуры 4.
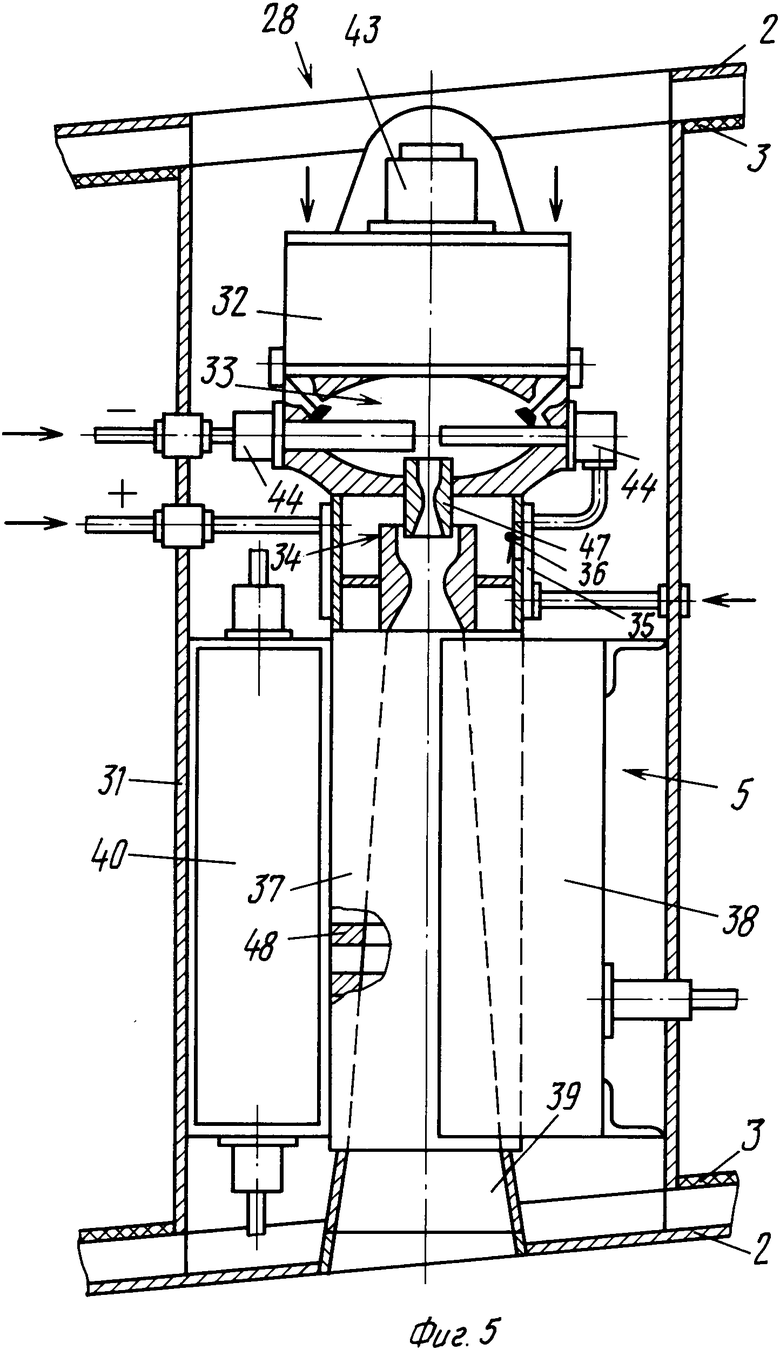
Магнитогидродинамические преобразователи 28 предназначены для создания реактивной тяги и генерирования электроэнергии и установлены в вертикально расположенных шахтах 31 симметрично относительно оси симметрии аппарата, в отсеке 19. Каждый магнитогидродинамический преобразователь 28 выполнен в виде последовательно расположенных приводного компрессора 32, связанного с окружающей средой, преобразователя 33 топлива в ионизированное рабочее тело, эжектирующего устройства 34, камера 35 разрежения которого связана через автоматический перепускной клапан 36 с отсеком 20 основных маховичных аккумуляторов 25 энергии и дополнительного аккумулятора 26 энергии, магнитогидродинамического канала 37 с сверхпроводящей магнитной системой 38, подключенной к дополнительному аккумулятору 26 энергии, соединенного с выходом эжектирующего устройства 34, и сопла (дюзы) 39, размещенного под аппаратом 1. Входные и выходные отверстия соответственно приводных компрессоров 32 и сопл 39 закрываются специальными герметизированными заслонками с приводами (не показаны). В данной конструкции аппарата предусмотрены восемь магнитогидродинамических преобразователей. Магнитогидродинамические каналы 37 электрически связаны через основные коммутационно-переключающие устройства 40 с блоками 41 управления и с электродами 23 верхних и нижний секций электромагнитной структуры 4.
Обратимые электромашинные преобразователи (электрогенераторы) 29 связаны через дополнительные коммутационно-переключающие устройства 42 с магнитогидродинамическими преобразователями 28 и соленоидами 22 электромагнитной структуры 4. Кроме того, дополнительные коммутационно-переключающие устройства 42 электрически связаны с основными коммутационно-переключающими устройствами 40 и предназначены для подвода энергии к дополнительному аккумулятору 26 энергии и к электродам 23 электромагнитной структуры 4.
Приводной компрессор 32 известной конструкции имеет электродвигатель 43 для приведения его в действие и связан с основным коммутационно-переключающим устройством 40 магнитогидродинамического преобразователя. Компрессор 32 предназначен для сжатия окружающей среды и подачи ее в преобразователь 33 топлива в ионизированное рабочее тело.
Преобразователь 33 топлива в ионизированное рабочее тело снабжен электрогидравлическим разрядником 44 и через вспомогательную аппаратуру (не показана) подключен к топливному баку 45, выполненному в виде полого секционированного по числу магнитогидродинамических преобразователей кольца, размещенного симметрично относительно оси симметрии аппарата во внутренней изоляционной оболочке корпуса в отсеке 19. В качестве топлива может быть использовано как традиционное топливо - сжиженный газ, жидкий металл, так и другие виды топлива, например тяжелая вода (Д2O), сверхтяжелая вода (Т2О) для слияния ядер изотопов водорода. В отсеке 19 аппарата предусмотрен бак 46 для воды (Н2О), выполненный в виде полого секционированного кольца, размещенного симметрично относительно оси симметрии аппарата. Вода используется как для жизнеобеспечения космонавтов, так и для получения исходных продуктов, например, суспензий для топливной системы магнитогидродинамических преобразователей.
Эжектирующее устройство 34 предназначено для разгона ионизированного рабочего тела, а также откачивания воздуха из отсека 20 основных маховичных аккумуляторов 25 энергии и дополнительного аккумулятора 26 энергии. Устройство 34 состоит из нескольких ступеней сопл 47, например, Лаваля.
Магнитогидродинамический канал 37 может быть выполнен круглого или квадратного сечения с системой электродов 48, подключенных к основному коммутационно-переключающему устройству 40. Сопло (дюза) 39 известной конструкции предназначено для формирования ионизированного потока рабочего тела при движении аппарата 1 в пространстве.
Изолированная кабина (ходовая рубка) 6, предназначенная для управления аппаратом 1, по форме в плане представляет собой круг. Стенка 48, пол 49 и аэрогидродинамический обтекатель 11 предназначены для защиты экипажа от внешних и внутренних полей: электрических, магнитных, тепловых и ионизирующих излучений. Вблизи внешней поверхности стенки 48 в отсеке 21 размещены средства 7 жизнеобеспечения экипажа, связанные через специальные переходные устройства со средствами 8 управления аппаратом - с пультом управления и пространством кабины 6. К средствам 7 жизнеобеспечения могут быть отнесены агрегаты подготовки воздушной смеси для дыхания и ее утилизации, поддержания заданных пределов температуры, влажности и давления, утилизации отходов жизнедеятельности экипажа, а также устройства для их отдыха. В отсеке 21 размещен запас продуктов питания космонавтов. Кроме того, в отсеке 21 смонтированы ЭВМ, блоки управления 41, подключенные к пульту управления 8.
На внутренней поверхности стенки 48 кабины 6 размещены средства 8 управления - пульт управления. На пульте управления расположены органы управления и контроля агрегатами аппарата, приборы ориентации и движения в пространстве, автоматические приборы расчета траектории движения, средства связи, приборы контроля и управления средой обитания экипажа и другие приборы для исследования космического пространства. Устройство 9 для старта и посадки аппарата 1 может быть выполнено в виде телескопических силовых цилиндров 49, на свободных штоках которых монтируются опорные башмаки 50. Устройство 9 в полете убирается в отсек 18. Люк 12, шахта 51 и люк 52 предназначены для входа и выхода космонавтов из аппарата 1.
Транспортный аппарат работает следующим образом.
Перед стартом в аппарат 1 подаются топливо, вода, продукты питания, космонавты занимают рабочие места за пультом управления 8, причем все агрегаты аппарата отключены от источников питания и бездействуют.
Для приведения в действие оборудования аппарата подключают внешний мощный источник электрической энергии через ввод (фидер) к дополнительному коммутационно-переключающему устройству 42, с помощью которого приводят в действие обратимые электромашинные преобразователи 29. Электромашинные преобразователи 29 раскручивают до предельно возможных оборотов основные маховичные аккумуляторы 25 энергии - супермаховики, затем к внешнему источнику электроэнергии через другой ввод (фидер) подключают дополнительный аккумулятор 26 энергии и резервный аккумулятор питания органов управления аппаратом. После подготовительных операций электромашинные преобразователи 29 переключают в режим электрогенераторов, используя энергию супермаховиков, с помощью которых через коммутационно-переключающие устройства 42 и 40 подводится регулируемая электроэнергия к верхним и нижним секциям электромагнитной структуры 4, включаются ионизаторы 13 внешней среды.
Может быть предусмотрен другой вариант подготовительных операций. Сначала электроэнергию подают к основным и дополнительному аккумуляторам 25, 26 энергии, а затем ко всем секциям магнитной структуры аппарата, в которых в силу сверхпроводимости начинают непрерывно циркулировать токи. После этого с пульта управления 8 подключают электроды 23 и ионизаторы 13 внешней среды.
Электрический ток, протекающий по проводящим элементам 21 секций магнитной структуры, направлен в противоположные стороны. В результате этого магнитные поля, создаваемые участками секций магнитной структуры в окружающей транспортный аппарат 1 среде, складываются от смежных проводящих элементов. Подача электроэнергии - напряжения на электроды 23 благодаря ионизации внешней среды приводит к тому, что между электродами 23 начинают течь токи. Поскольку направление магнитного поля, создаваемого сверхпроводящими элементами 21, в основном перпендикулярно линиям электрического тока, на окружающую среду будет действовать лоренцова сила f в направлениях к периферии транспортного аппарата 1. Реакция отбрасываемой электромагнитной силой f окружающей среды (ионизированного воздуха) создает силу тяги (реактивную тягу), Fp, которая, складываясь от шестнадцати секций электромагнитной структуры, создает подъемную силу А, направленную от поверхности Земли. Транспортный аппарат, преодолевая силу притяжения Земли, отрывается от поверхности последней, при этом подъемную силу А аппарата регулируют за счет интенсивности ионизации внешней среды и увеличения тока между электродами 23. Реакция электромагнитного излучения ионизаторов внешней среды также увеличивает подъемную силу А. Транспортный аппарат 1 приобретает равномерно ускоренное движение.
Из аэрогидродинамики известно, что подъемная сила А равна произведению плотности ρ, циркуляции r и относительной скорости аппарата в среде V(A= ρ˙r˙ V). В связи с тем, что лоренцова сила f в каждый момент времени сбрасывает окружающую среду (ионизированный воздух) со всей поверхности транспортного аппарата, то как уплотнение среды с плотностью ρ, так и пограничный слой среды вблизи поверхности аппарата практически отсутствует, т.е. сопротивление среды движению аппарата практически равно нулю. Транспортный аппарат, сбрасывая в каждый момент времени ионизированную среду с поверхности, перемещается в искусственно создаваемом безвоздушном пространстве. Скорость V транспортного аппарата велика и может достигать порядка 185000 км/ч.
Таким образом, шестнадцать секций электромагнитной структуры энергодвигательной установки транспортного аппарата эквивалентны шестнадцати магнитогидродинамическим двигателям с внешним магнитным полем.
При подъема транспортного аппарата 1 от поверхности Земли уменьшается плотность среды. Плотность ρ на высоте 8 км 0,526 кг/м3, что снижает по абсолютной величине подъемную силу А аппарата 1. Для увеличения подъемной силы А аппарата необходимо либо увеличивать силу тока в электромагнитной структуре (резерв энергии ограничен), либо последовательно включать магнитогидродинамические преобразователи 28. На первой стадии подъема аппарата включают четыре магнитогидродинамического преобразователя, а затем на высоте 100 км - остальные магнитогидродинамические преобразователи.
Для включения магнитогидродинамических преобразователей 28 предварительно с пульта управления 8 открывают заслонки отверстий приводных компрессоров 32 и сопл 39, затем включают электродвигатель 43 компрессора 32 и систему топливопитания преобразователя 33 топлива в ионизированное рабочее тело. В преобразователь 33 одновременно впрыскивают при заданном соотношении топливо и воду и пропускают через среду высоковольтный искровой разряд, в результате которого возникает электрогидравлический удар. В преобразователе 33 среда мгновенно превращается в плазменное состояние с выделением большого объема ионизированного рабочего тела (ионизированный газ) с высоким давлением и температурой, при этом ударная волна направлена вдоль продольной оси преобразователя 33. Из преобразователя 33 ионизированное рабочее тело выбрасывается в эжектирующее устройство 34, в котором рабочее тело ускоряется, причем скорость потока ионизированного рабочего тела превосходит на порядок скорость звука. Ускоренный поток ионизированного рабочего тела устремляется в магнитогидродинамический канал 37 известной конструкции.
Из магнитной гидродинамики известно, что электрическая мощность р, генерируемая в единице объема рабочего тела, Вт/м3
р = σ˙B2˙v2˙η(1-η), где σ - удельная электрическая проводимость рабочего тела, Ом˙ м-1;
В - индукция магнитного поля, тл;
v - скорость движения рабочего тела, м/с;
η- нагрузочный параметр, при eta<N>< 1 величина р положительна и магнитогидродинамический преобразователь служит генератором; при eta<N>> 1 магнитогидродинамический преобразователь является двигателем.
Из вышеприведенного уравнения следует, что чем выше удельная электрическая проводимость рабочего тела σ , индукция магнитного поля В и скорость v движения рабочего тела, тем выше электрическая мощность р.
Из магнитогидродинамического канала 37 поток ионизированного рабочего тела выбрасывается через сопло 39 в пространство. Электрическая энергия, полученная в магнитогидродинамическом преобразователе, через коммутационно-переключающие устройства 40, 42 подводится соответственно к электродам 23, а также к основным маховичным аккумуляторам 25 энергии и дополнительному аккумулятору 26 энергии, при этом при помощи обратимых электромашинных преобразователей 29 дополнительно раскручиваются маховичные аккумуляторы 25 энергии и подзаряжается дополнительный аккумулятор 26 энергии.
При истечении ионизированного рабочего тела из сопл 39 магнитогидродинамических преобразователей 28 на сопла 39 действует сила тяги (реактивная сила) Fp, направленная по направлению движения аппарата 1.
Благодаря воздействию на транспортный аппарат 1 двадцати, а затем двадцати четырех магнитогидродинамических преобразователей аппарату сообщается дополнительное ускорение, вследствие чего увеличивается его скорость движения в пространстве.
При движении транспортного аппарата 1 в областях повышенной ионизации атмосферы Земли с максимумом ионов порядка 104 см3 на высоте 10-40 км интенсивность ионизаторов 13 внешней среды снижается либо ионизаторы 13 внешней среды отключаются в сильно ионизированных слоях атмосферы Земли.
При достижении заданного удаления от поверхности Земли, например 500 км и более, с пульта управления 8 отключаются магнитогидродинамические преобразователи 28 и обесточиваются ионизаторы 13 внешней среды и электроды 23 электромагнитной структуры 4, при этом магнитная структура функционирует для защиты аппарата от ионизированных полей и космических лучей. После отключения магнитогидродинамических преобразователей 28, ионизаторов 13 внешней среды и электродов 23 подъемная сила А аппарата падает до нуля и аппарат превращается благодаря действующим на него сил тяготения в искусственный спутник Земли для исследования космического пространства и проведения работ в соответствии с программой полета.
В связи с тем, что вращающиеся тела, например маховые колеса, роторы электрических моторов и другие тела, стремятся наклонить свои оси так, чтобы они указывали на Полярную звезду, т.е. чтобы их оси стали параллельны оси вращения Земли, супермаховики 25, взаимодействуя друг с другом, компенсируют друг друга и обеспечивают ориентацию аппарата 1 независимо от оси вращения Земли. Коррекцию траектории движения аппарата 1 осуществляют при помощи магниогидродинамических преобразователей 28 и ионизаторов 13 внешней среды.
Для обеспечения возвращения транспортного аппарата 1 из космического пространства на поверхность Земли включают ионизаторы 13 внешней среды в направлении движения аппарата. Реакция электромагнитного излучения ионизаторов 13 внешней среды направлена в направлении установки ионизаторов 13 внешней среды. Аппарат 1 тормозит свое движение и под действием силы тяжести снижается в направлении поверхности Земли.
При вхождении аппарата 1 в относительно плотные слои атмосферы Земли осуществляется дальнейшее торможение аппарата с использованием его аэродинамического профиля и возбуждаемых электромагнитных сил секций электромагнитной структуры 4. Для этого с пульта управления 8 включается часть ионизаторов 13 внешней среды и электродов 23 электромагнитной структуры 4 с изменением на противоположное течение токов в электродах 23, причем включение осуществляют тех ионизаторов 13 внешней среды и электродов 23 секций электромагнитной структуры 4, которые находятся за перпендикулярной к направлению движения аппарата плоскостью. При изменении направления течения токов в электродах 23 изменяется направление электромагнитных сил f к оси симметрии аппарата, а реактивная сила Fp - к периферии аппарата, при этом подъемная сила Аn, возникающая при движении, компенсирует силу тяжести аппарата Ра.
При достижении равенства сил, воздействующих на аппарат 1, с пульта управления 8 переключаются электроды 23 и включаются все ионизаторы 13 внешней среды с таким расчетом, чтобы верхние секции электромагнитной структуры 4 возбуждали подъемную силу А, направленную вверх, а нижние секции электромагнитной структуры 4 - силу А', направленную вниз аппарата 1, причем подъемная сила А больше силы А' на величину силы тяжести Ра аппарата 1. При таком соотношении сил аппарат 1 зависает над поверхностью Земли. При незначительном увеличении подъемной силы А на величину Δ А аппарат 1 из положения зависания удаляется от поверхности Земли, а при увеличении силы А' на величину ΔА', из положения зависания аппарат 1 приземляется на поверхность Земли, при этом из аппарата выдвигают устройство 9 для посадки аппарата 1.
Аппарат 1 из положения зависания над поверхностью Земли может перемещаться в любом направлении. Для этого с пульта управления 8 переключают часть электродов 23 электромагнитной структуры 4, размещенных на верхней части аппарата, в направлении движения, при этом направление электромагнитных сил f будет направлено к оси симметрии аппарата, а реакция электромагнитных сил - реактивная сила Fp - к периферии аппарата 1. В результате сложения реактивных сил Fp, возникающих на верхней части аппарата 1, аппарат перемещается в заданном направлении. При движении аппарата 1 в любом направлении увеличивается подъемная сила А за счет скорости V перемещения.
Электромагнитная структура 4 электродвигательной установки транспортного аппарата 1 позволяет резко изменять направление его движения, например на 180о. Для этого с пульта управления 8 уменьшают силу токов, протекающих по электродам 23 нижних секций электромагнитной структуры 4 аппарата, и реверсируют токи в электродах 23 верхних секций электромагнитной структуры 4. В результате транспортный аппарат 1 изменяет направление движения на 180о, при этом чем больше скорость движения аппарата, тем больше подъемная сила А, возникающая за счет аэродинамического профиля аппарата.
Транспортный аппарат 1 может перемещаться в морской воде, так как морская вода электропроводна.
Для осуществления движения в морской воде транспортный аппарат 1 приводняется, при этом в аппарате 1 задраиваются все люки в концентрических переборках и заслонки магнитогидродинамических преобразователей 28, а затем открываются кингстоны отсеков 17 и 18 (условно не показаны) и морская вода заполняет отсеки 17 и 18, увеличивая Ра на вес Рб балласта. При одновременном погружении аппарата 1 включаются секции электромагнитной структуры 4, при этом ионизаторы 13 внешней среды не включаются, так как проводимость забортной воды относительно высока и составляет 4 Ом˙ м-1, например, в Атлантическом океане на глубине 120 м.
Приемы включения секций электромагнитной структуры 4 аналогичны вышеописанным приемам. Старт транспортного аппарата с глубины океана осуществляется аналогичными приемами, описанными при старте аппарата с поверхности Земли в космическое пространство. Отличительная особенность заключается в том, что при переходе границы морская вода - воздух сначала включаются ионизаторы 13 внешней среды верхней части аппарата, а затем - на его нижней части. Кроме того, при подъеме аппарата с поверхности воды открываются кингстоны, из которых самотеком выливается вода из отсеков 17 и 18. В другом варианте вода из отсеков 17 и 18 продувается газообразной средой на глубине океана.
Отличительной особенностью движения аппарата в морской воде заключается еще и в том, что скорость движения аппарата под водой значительно ниже, чем в воздушной среде, так как плотность (удельный вес) морской воды во много раз выше в сравнении с воздухом.
Таким образом, транспортный аппарат обеспечивает возможность старта с космодрома в космическое пространство без ракеты-носителя, его возвращение, расширение области применения, повышение его маневренности и управляемости.
Транспортный аппарат универсален и может перемещаться в любых средах, что создает дополнительный положительный эффект, заключающийся в том, что предложенный аппарат может заменить ранее известные космические комплексы, а также средства для плавания под водой в океанах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прямоточный релятивистский двигатель | 2020 |
|
RU2776324C1 |
| КОСМИЧЕСКАЯ ДВУХРЕЖИМНАЯ ЯДЕРНО-ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА ТРАНСПОРТНО-ЭНЕРГЕТИЧЕСКОГО МОДУЛЯ | 2014 |
|
RU2592069C2 |
| ГИБРИДНЫЙ ПРИВОД К ТРАНСПОРТНОМУ СРЕДСТВУ | 1992 |
|
RU2020242C1 |
| КОСМИЧЕСКАЯ ДВУХРЕЖИМНАЯ ЯДЕРНО-ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА ТРАНСПОРТНО-ЭНЕРГЕТИЧЕСКОГО МОДУЛЯ | 2014 |
|
RU2592071C2 |
| Способ создания электрореактивной тяги | 2016 |
|
RU2635951C1 |
| СОЛНЕЧНАЯ МАГНИТОГИДРОДИНАМИЧЕСКАЯ ЭЛЕКТРОСТАНЦИЯ | 2010 |
|
RU2455583C2 |
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ БОГДАНОВА | 2010 |
|
RU2449170C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1999 |
|
RU2158683C1 |
| Сверхпроводящий накопитель энергии | 2018 |
|
RU2696831C1 |
| Способ реализации межпланетных сообщений и технические устройства для его реализации | 2019 |
|
RU2737751C2 |
Использование: космические исследования, транспортные средства, пилотируемые в атмосфере планеты, в открытом космосе, а также в морской воде. Сущность изобретения: транспортный аппарат (ТА) содержит аэродинамически профилированный корпус 2 с изолированной кабиной экипажа 6, дополнительный корпус 3 из электромагнитоизоляционного материала, ионизаторы 13 среды (лазеры жесткого УФ-излучения), средства регулирования скорости движения ТА в виде секционированной, установленной на корпусе 3 системы сверхпроводников 21, размещенных над ними на магнитопрозрачном внешнем корпусе 2 электродов и сверхпроводящих соленоидов 22, средства энергоснабжения ТА, включающие супермаховики 25 (в качестве основных аккумуляторов), дополнительный аккумулятор 26 в виде сверхпроводящего соленоида, МГД-преобразователи 28 и двигатели/генераторы 29 со сверхпроводящими обмотками, механически связанные с маховиками 25 (все указанные элементы связаны друг с другом и с элементами регулирования скорости ТА соответствующей коммутационной системой), а также различные вспомогательные системы: посадочно-взлетную, топливную (с баками 46 и 45 для воды, для горючего), жизнеобеспечения экипажа, управления (включая пульт 8) и т.д. Подъемная сила ТА создается за счет организации обтекания корпуса ионизуемой средой, а также работы МГД-преобразователей 28, куда подается среда из баков 45-46 и подвергается высоковольтному разряду. При плавании под водой затопляются отсеки 17 и 18 корпуса. 9 з.п. ф-лы, 15 ил.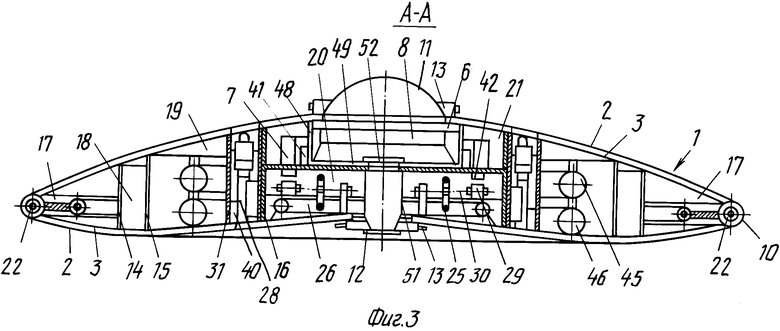
| Патент US N 3273336, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
