Изобретение относится к машиностроению, в частности к двигателестроению, а именно к двигателям внутреннего сгорания с линейным и орбитальным перемещением рабочих органов двухстороннего действия.
Известен двигатель с размещенным в цилиндре поршнем двухстороннего действия и возвратно-качательным его перемещением вокруг своей оси (1).
Недостатками аналога являются необходимость установки отдельного нагнетателя для продувки, а также неблагоприятные условия работы шарового шарнира механизма качания поршня из-за совмещения его функций с кривошипно-шатунным механизмом преобразования движения поршня во вращение вала, предполагающего решения альтернативных задач: обеспечение требуемого рабочего хода поршня и возможность его поворота на угол, соответствующий радиусу кривошипа.
Известен двигатель с рычажным механизмом преобразования движения, содержащий картер, закрепленные на нем оппозитно два цилиндра, установленные в последних втулки, снабженные головками и днищами поршни, размещенные во втулках между головками и днищами с образованием подпоршневой и рабочей камер переменного объема, расположенный в картере кривошипный вал с шатунной шейкой, силовой рычаг, установленный свободно на оси, закрепленной в картере, и механизм преобразования качательного движения рычага во вращение вала, причем поршни жестко связаны между собой при помощи штока, расположенного со втулками, а силовой рычаг соединен со штоком при помощи шарнира (2).
Недостатками прототипа являются малая надежность работы цилиндро-поршневой группы вследствие значительного ее износа и большие потери на трение в приводе клапанов газораспределения.
Целью изобретения является повышение надежности и ресурса.
Поставленная цель достигается тем, что в известном двигателе плоскость качания силового рычага смещена относительно продольной оси штока, соединение штока с рычагом выполнено в виде пальца, закрепленного на штоке перпендикулярно продольной оси последнего и установленной в рычаге сферической обоймы шарового шарнира, в отверстии которой расположен палец, причем рычаг выполнен жестким с неизменным расстоянием между осью качания и осью шарнира.
Цель достигается также тем, что двигатель снабжен дополнительным рычагом, связанным кинематически с кривошипным валом, а втулки выполнены подвижными, жестко соединены между собой и связаны шарнирно с дополнительным рычагом с возможностью перемещения в сторону, противоположную перемещению поршней.
Цель достигается тем, что втулки связаны между собой при помощи полого штока, соединенного с днищами последних, при этом шток поршней расположен в полом штоке коаксиально с последним.
Цель достигается тем, что плоскость качания дополнительного рычага смещена относительно продольной оси штоков в сторону, противоположную смещению плоскости качания силового рычага, а шарнирное соединение полого штока с дополнительным рычагом выполнено идентично соединению силового рычага.
Цель достигается тем, что оси качания силового и дополнительного рычага совпадают.
Цель достигается тем, что кривошипный вал выполнен двухколенным со смещением шатунных шеек одна дополнительно другой на 180о по углу поворота вала, силовой и дополнительный рычаги выполнены двуплечими, а шатунные шейки связаны при помощи шатунов с плечами соответственно силового и дополнительного рычагов.
Цель достигается тем, что он может быть снабжен синхронизирующим двуплечим рычагом, кривошипный вал выполнен одноколенным, один из рычагов выполнен трехплечим, а другой - двуплечим, причем ось вращения вала смещена относительно оси цилиндров в сторону, противоположную смещению осей рычагов, синхронизирующий рычаг свободно установлен на оси вращения кривошипного вала, плечи силового и дополнительного рычагов соединены при помощи тяг, соответственно, с первым и вторым плечами синхронизирующего рычага, а шатун, установленный на шатунной шейке, шарнирно связан с третьим плечом трехплечего рычага.
Цель достигается тем, что двигатель может быть снабжен синхронизирующим трехплечим рычагом, установленным свободно на оси, кривошипный вал выполнен одноколенным, силовой и дополнительный рычаги выполнены двуплечими и установлены на оси вращения кривошипного вала, причем два плеча синхронизирующего рычага соединены при помощи тяг соответственно с плечами силового и дополнительного рычагов, а третье плечо синхронизирующего рычага связано при помощи шатуна с шатунной шейкой кривошипного вала.
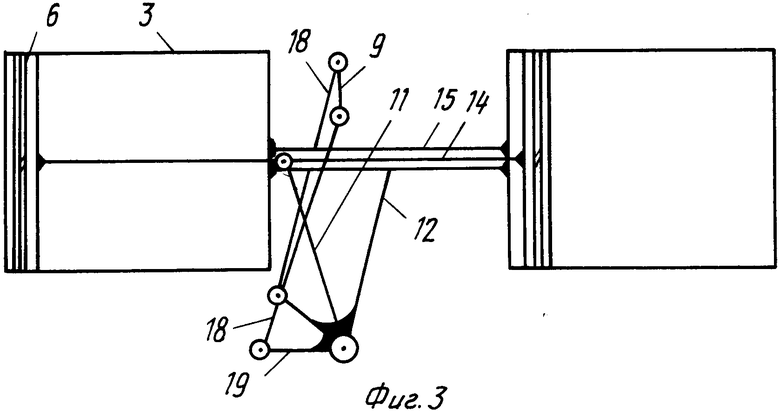
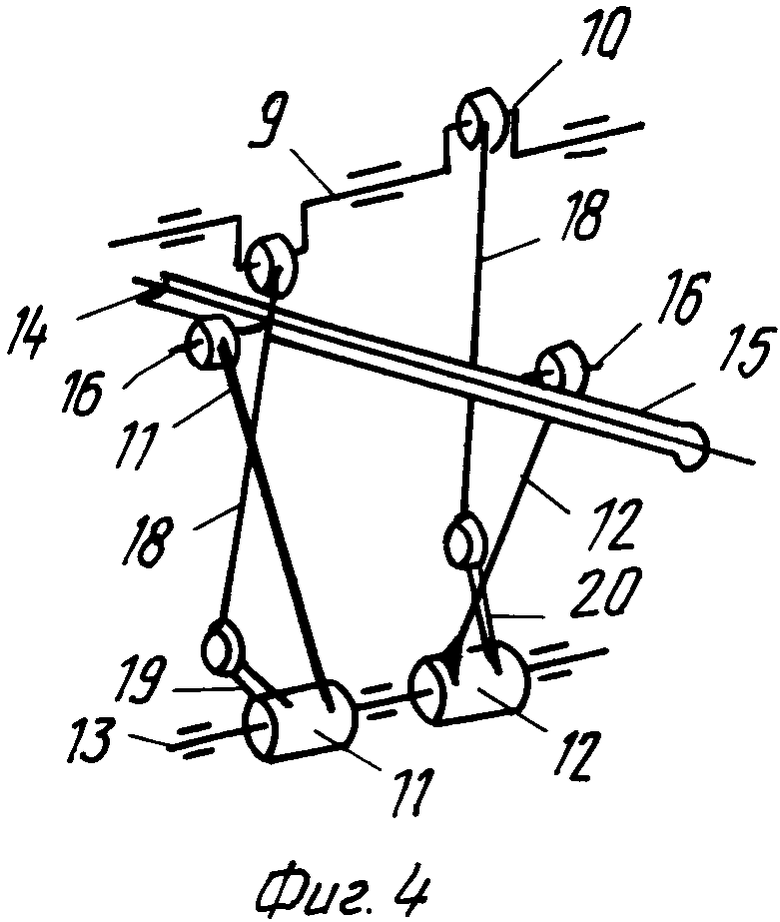
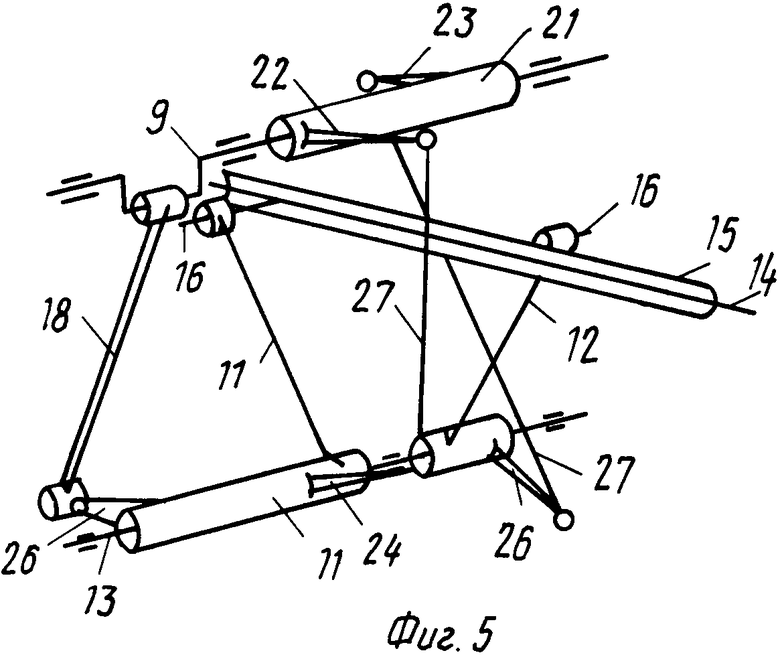
На фиг.1 изображен описываемый двигатель; на фиг.2 - разрез А-А на фиг. 1; на фиг.3 - вариант кинематической схемы механизма преобразования движения; на фиг.4 - то же, в изометрии; на фиг.5 - то же, вариант; на фиг.6 - то же, вариант.
Двигатель содержит картер 1, закрепленные на нем оппозитно два цилиндра 2, установленные в них втулки 3, снабженные головками 4 и днищами 5, поршни 6, размещенные во втулках 3 между головками 4 и днищами 5 с образованием подпоршневой 7 и рабочей 8 камер переменного объема, кривошипный вал 9 с шатунной шейкой 10, установленный в картере 1, силовой рычаг 11 и дополнительный рычаг 12, установленные свободно на оси 13 с возможностью качания в противоположные стороны. Поршни 6 жестко связаны между собой при помощи штока 14, связанного шарнирно с силовым рычагом 11, а втулки 3 соединены при помощи полого штока 15, связанного также шарнирно с дополнительным рычагом 12, при этом шток 14 расположен в полом штоке 15 коаксиально с ним. Плоскости качания силового 1 и дополнительного 12 рычагов смещены относительно оси штоков 14 и 15 в противоположные стороны, а шарнирное крепление штоков 14 и 15 с рычагами соответственно 11 и 12 выполнено в виде пальца 16, закрепленного на штоке 14 или 15 перпендикулярно его продольной оси и расположенного в отверстии сферической обоймы 17 шарового шарнира, установленной соответственно в рычаге 11 и 12.
Механизм преобразования движения поршней 6 и втулок 3 может быть выполнен в виде двухколенного кривошипного вала 9, шатунные шейки 10 которого смещены одна относительно другой на 180о и связаны при помощи шатунов 18 с плечами 19 и 20 соответственно силового 11 и дополнительного 12 рычагов.
Вал 9 может быть выполнен одноколенным. Тогда в варианте выполнения механизма на оси вращения вала 9 свободно установлен синхронизирующий двуплечий рычаг 21 с плечами 22 и 23, силовой рычаг 11 выполнен трехплечим с плечами 24 и 25, дополнительный рычаг 11 - двуплечим с плечом 26. При этом плечо 24 силового 11 и плечо 26 дополнительного 12 рычагов соединены при помощи тяг 27 соответственно с плечом 22 и плечом 23 синхронизирующего рычага 21, а плечо 25 силового рычага 11 связано при помощи шатуна 18 с шатунной шейкой 10 кривошипного вала 9.
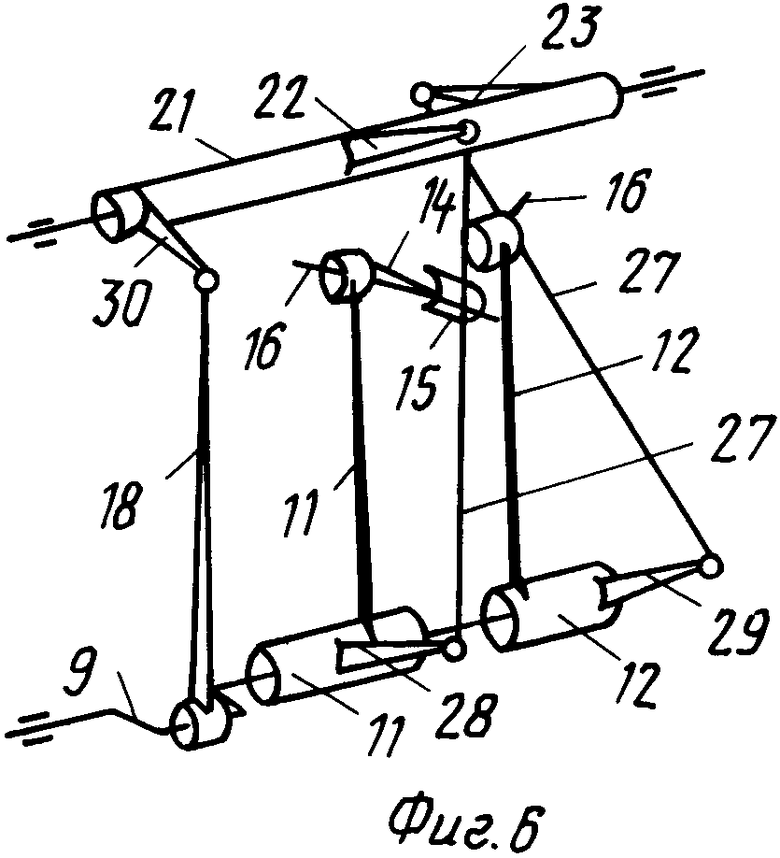
В варианте выполнения механизма с одноколенным валом 9 (фиг.5) оси 13 рычагов 11 и 12 совпадают с осью вращения вала 9, плечи 22 и 23 синхронизирующего рычага 21 соединены при помощи тяг 27 с плечами 28 и 29 соответственно силового 11 и дополнительного 12 рычагов, а третье плечо 30 синхронизирующего рычага 21 связано при помощи шатуна 18 с шатунной шейкой 10 вала 9.
Двигатель работает следующим образом. Поршни 6 и втулки 3 перемещаются возвратно-поступательно вдоль продольной оси цилиндров 2 в противоположных направлениях. Рычаги 11 и 12, связанные соответственно со штоками 14 и 15 поршней 6 и втулок 3, качаются на оси 13, и за счет их связи с кривошипным валом 9 при помощи шатунов 18 (см.фиг.3) преобразовывают движение поршней 6 и втулок 3 в его вращение.
Смещение плоскостей качания рычагов 11 и 12 и шарнирная их связь со штоками 14 и 15, расположенными коаксиально, при жесткой конструкции рычагов 11 и 12 с неизменным расстоянием между осью 13 и осью сферической обоймы 17 шарового шарнира позволяет поршням 6 и втулкам 3 совершать возвратно-вращательное движение вокруг их продольной оси в противоположных направлениях одновременно с возвратно-поступательным перемещением.
В варианте выполнения механизма преобразования движения качание рычага 11 передается его плечам 24 и 25, а качание рычага 12 - его плечу 26. Синхронизация качания рычагов 11 и 12 в противоположных направлениях происходит за счет связи плеч 24 и 26 рычагов, соответственно, 11 и 12, при помощи тяг 27 с плечами 22 и 23 синхронизирующего рычага 21, установленного на оси вращения вала 9, а качание плеча 25 рычага 11 преобразуется во вращение кривошипного вала 9 при помощи шатуна 18, связанного с шатунной шейкой 10 (фиг.4).
На фиг.5 изображен вариант выполнения механизма с одноколенным валом, в котором ось качания рычагов 11 и 12 совпадает с осью вращения вала 9, а их качание синхронизировано при помощи тяг 27, соединяющих плечи 28 и 29 рычагов 11 и 12 соответственно с плечами 22 и 23 синхронизирующего рычага 21, а крутящий момент на кривошипный вал 9 передается через плечо 30 синхронизирующего рычага 21 при помощи соединенного с плечом 30 и шатунной шейкой 10 шатуна 18.
Таким образом вращательное движение поршней 6 и втулок 3 вокруг своей оси позволяет снизить пиковые значения силы трения в цилиндро-поршневой группе в мертвых точках и увеличить за счет этого ресурс двигателя. Выполнение связи штоков с рычагами при помощи шаровых шарниров позволяет отказаться от ползунных механизмов или других - со степенью свободы вдоль рычага, а одновременное перемещение втулок и поршней позволяет уменьшить абсолютную величину их перемещения и угол качания рычагов при неизменном рабочем объеме, что повышает надежность работы всего механизма из-за уменьшения в нем нагрузок.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОППОЗИТНЫЙ ДВИГАТЕЛЬ СО ВСТРЕЧНО ДВИЖУЩИМИСЯ РАБОЧИМИ ОРГАНАМИ | 1992 |
|
RU2044905C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2019722C1 |
| ЛИНЕЙНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2019721C1 |
| АКСИАЛЬНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1993 |
|
RU2067675C1 |
| АКСИАЛЬНЫЙ ДВИГАТЕЛЬ | 1993 |
|
RU2067676C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ЩЕЛЕВЫМ ГАЗОРАСПРЕДЕЛЕНИЕМ | 1996 |
|
RU2103525C1 |
| АКСИАЛЬНО-ПОРШНЕВАЯ МАШИНА | 1993 |
|
RU2067677C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ И КРИВОШИПНЫЙ МЕХАНИЗМ | 1992 |
|
RU2018007C1 |
| ОППОЗИТНЫЙ ЧЕТЫРЕХТАКТНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2027035C1 |
| ЧЕТЫРЕХТАКТНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2028471C1 |
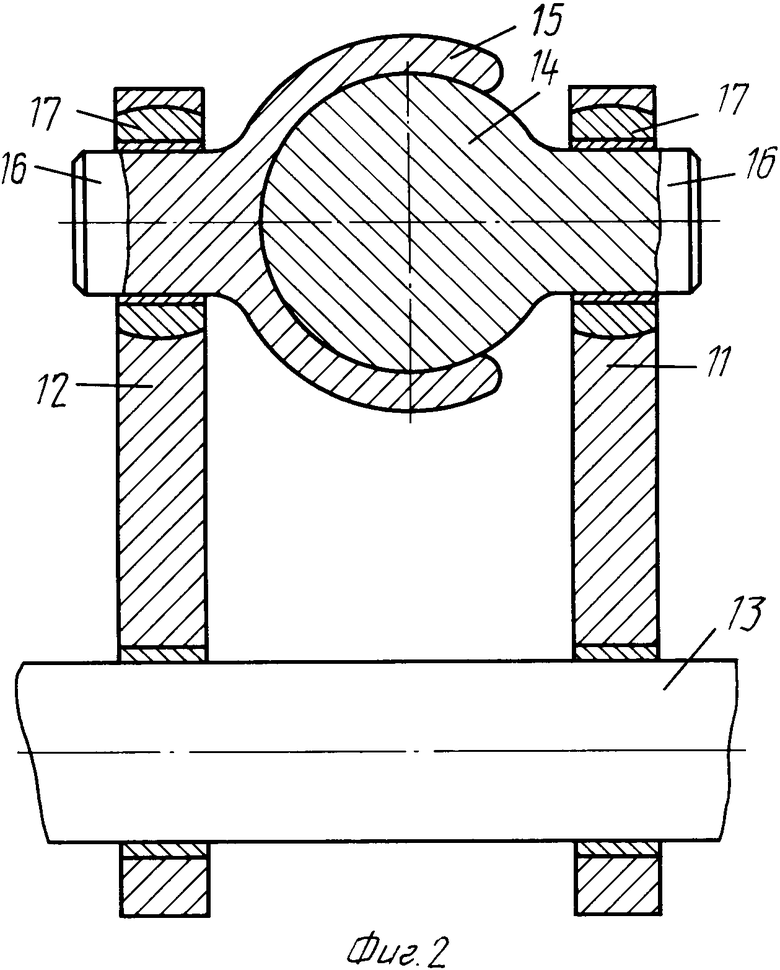
Использование: двигателестроение, а именно двигатели внутреннего сгорания с поршнями двухстороннего действия. Сущность изобретения: двигатель содержит два оппозитных цилиндра, в которых размещены подвижные втулки 3, снабженные головками 4 и днищами 5. Во втулках 3 между головками 4 и днищами 5 размещены поршни 6 с образованием подпоршневой 7 и рабочей 8 камер переменного объема. Втулки 3 жестко связаны между собой при помощи трубчатого штока 15, соединенного с их днищами 5, а поршни 6 соединены при помощи штока 14, который расположен внутри трубчатого штока 15 коаксиально с ним. Штоки 14 и 15 соединены соответственно с силовым рычагом 11 и дополнительным рычагом при помощи шарнирного соединения, выполненного в виде консольного пальца 16, который закреплен на каждом штоке перпендикулярно их продольной оси, и сферической обоймы - шарового шарнира, установленной в каждом рычаге, при этом палец 16 расположен в отверстии обоймы. Качание основного и дополнительного рычагов в противоположные стороны преобразуется во вращение кривошипного вала. За счет выполнения основного и дополнительного рычагов жесткими с неизменным расстоянием между осью их качания и осью шарнира крепления со штоками во время возвратно-поступательного перемещения поршни 6 и втулки 3 одновременно совершают и возвратно-вращательное движение, что позволяет снизить пиковые значения силы трения в мертвых точках и повысить надежность работы узлов механизма преобразования движения. 7 з.п. ф-лы, 5 ил.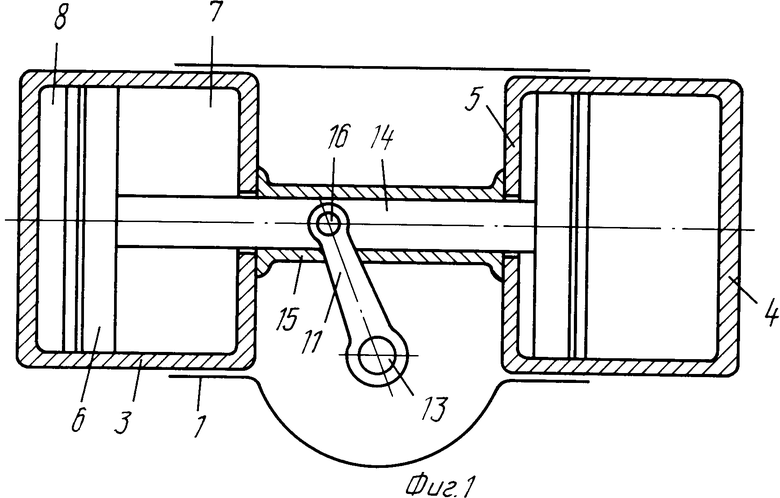
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 1762614, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
