Изобретение относится к машиностроению, в частности к двигателестроению, а именно к двигателям внутреннего сгорания с линейно перемещающимися рабочими органами цилиндро-поршневой группы.
Известен двигатель внутреннего сгорания, содержащий цилиндр с размещенным в нем поршнем, соединенным при помощи системы рычагов с кривошипным валом (1).
Недостатками аналога являются большие инерционные нагрузки в механизме, ведущие к необходимости его усиления и увеличению массы, а также большие газовые нагрузки на корпусные детали.
Известен двигатель внутреннего сгорания, содержащий картер, два оппозитных цилиндра, закрепленных на картере, установленные в цилиндрах втулки, снабженные головками и днищами, поршни, размещенные между головками и днищами с образованием подпоршневой и рабочей камер переменного объема, и механизм преобразования возвратно-поступательного движения, выполненный в виде силового рычага, установленного свободно на оси, и установленного в картере кривошипа с шатунной шейкой, связанной с первым плечом силового рычага при помощи шатуна, причем втулки и поршни попарно соединены между собой, одна из пар последних шарнирно связана с вторым плечом силового рычага, а ось кривошипа смещена относительно оси цилиндров (2).
В прототипе возможно некоторое уменьшение инерционных нагрузок в механизме посредством попарного соединения поршней, однако действие газовых нагрузок на картер и корпусные детали цилиндра приводит к необходимости их усиления и увеличения за счет этого их массы, а сравнительно большой угол качания силового рычага приводит к увеличению нагрузок и потерь в кулисном механизме связи рычага с поршнями.
Целью изобретения является повышение удельных показателей двигателя и его надежности.
Поставленная цель достигается тем, что известный двигатель снабжен установленным свободно на оси дополнительным рычагом с двумя плечами, втулки выполнены подвижными, а силовой рычаг выполнен трехплечим, причем вторая пара соединения связана с первым плечом дополнительного рычага с возможностью перемещения пар соединений втулок и поршней в противоположные стороны.
Поставленная цель достигается также тем, что ось качания силового рычага расположена симметрично оси качания дополнительного рычага относительно оси цилиндров.
Цель достигается тем, что одна пара соединения выполнена в виде жестко связанных между собой поршней, а другая пара - в виде жестко связанных втулок. Во втором варианте выполнения каждая пара соединения выполнена в виде поршня, жестко связанного со втулкой противоположного цилиндра.
Цель достигается также тем, что двигатель содержит дополнительную идентичную пару цилиндров с рычагами и шатуном, установленную параллельно первой паре цилиндров, причем оси рычагов пар цилиндров совпадают, а шатун дополнительной пары установлен на шатунной шейке кривошипа первой пары.
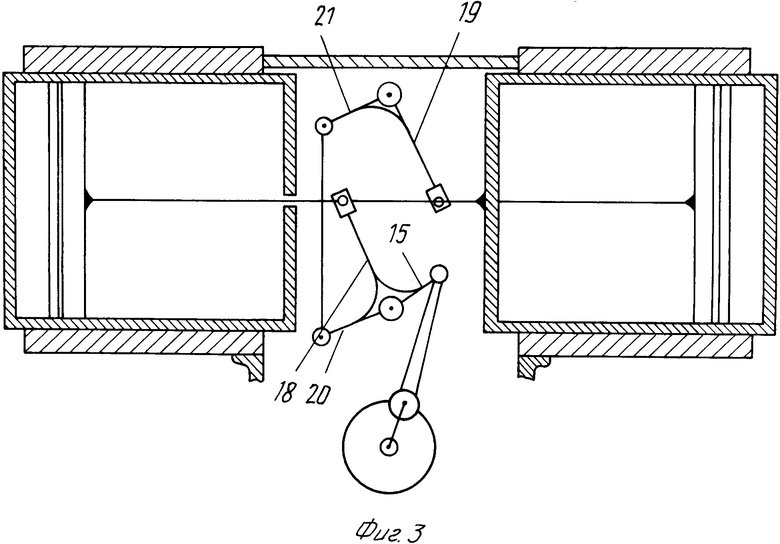
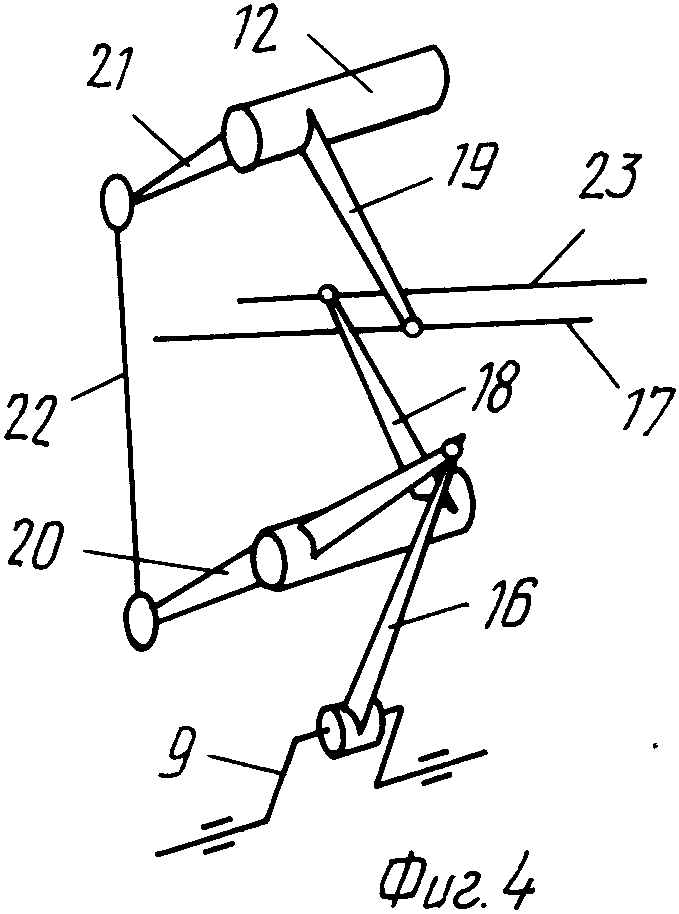
На фиг.1 представлен описываемый двигатель, вариант с жестко связанными между собой поршнями; на фиг.2 - разрез А-А на фиг.1; на фиг.3 - двигатель, вариант с соединением каждого поршня с втулкой противоположного цилиндра; на фиг.4 - кинематическая схема механизма преобразования в изометрии.
Двигатель содержит картер 1, два оппозитных соосных цилиндра 2, закрепленных на картере 1, подвижные втулки 3, установленные в цилиндрах 2 и снабженные головками 4 и днищами 5, поршни 6, размещенные во втулках 3 между головками 4 и днищами 5 с образованием подпоршневой 7 и рабочей 8 камер переменного объема, и механизм преобразования, выполненный в виде установленного в картере 1 кривошипа 9 с шатунной шейкой 10, силового трехплечего рычага 11 и дополнительного двуплечего рычага 12, установленных свободно на осях соответственно 13 и 14, при этом плечо 15 силового рычага 11 связано при помощи шатуна 16 с шатунной шейкой 10 кривошипа 9.
Втулки 3 и поршни 6 попарно соединены между собой, например, при помощи штоков 17, при этом одна пара соединения шарнирно связана с плечом 18 силового рычага 11, другая пара - с плечом 19 дополнительного рычага 12, а плечи 20 и 21 соответственно рычагов 11 и 12 связаны между собой при помощи тяги 22.
Одна пара соединения может быть образована связанными между собой при помощи штоков 17 поршнями 6, а другая - связанными при помощи штоков 23 втулками 3.
В варианте выполнения (фиг.2) пары соединения образованы поршнями 6, жестко связанными с втулками 3 противоположных цилиндров 2.
Двигатель может содержать дополнительную идентичную пару цилиндров 2 с рычагами 11 и 12 и шатуном 16, установленную параллельно первой паре цилиндров 2, при этом оси 13 и 14 обеих пар цилиндров 2 соответственно совпадают, а шатун 16 дополнительной пары установлен на шатунной шейке 10 кривошипа 9 первой пары цилиндров 2.
Двигатель работает следующим образом. Жестко связанные между собой поршни 6 перемещаются во втулках 3, передавая возвратно-поступательное движение качающемуся силовому рычагу 11 за счет шарнирной связи его плеча 18 со штоком 17 поршней 6. Плечо 15 силового рычага 11 связано при помощи шатуна 16 с шатунной шейкой 10 кривошипного вала 9, за счет чего происходит преобразование качания силового рычага 11 во вращение вала 9. Движение втулок 3 в противоположную поршням 6 сторону передается качающемуся дополнительному рычагу 12, за счет шарнирной связи его плеча 19 со штоком 23 втулок 3. Синхронизация движения поршней 6 и втулок 3 происходит за счет кинематической связи плеча 20 рычага 11 с плечом 21 рычага 12 при помощи тяги 22.
Таким образом, процесс в рабочих камерах 8 при реализации в двигателе двухтактного цикла происходит поочередно и равномерно со сдвигом на 180о по углу поворота вала 9, что в совокупности с противоположным перемещением рабочих органов позволяет уравновесить двигатель. Выполнение втулок 3 с головками 4 подвижными позволяет устранить воздействие инерционных нагрузок на механизм преобразования и газовых нагрузок - на рубашку цилиндра 2 и картер 1. Перемещение головок 4 с втулками 3 позволяет также уменьшить абсолютную величину перемещения рабочих органов и деталей механизма преобразования при неизменном рабочем объеме двигателя.
В варианте выполнения двигателя со связанными между собой поршнем 6 и втулкой 3 противоположного цилиндра 2 рабочие процессы в камерах 8 происходят одновременно при двухтактном цикле его работы, что не позволяет устранить воздействие инерционных сил в механизме, но упрощает подбор масс противоположно движущихся деталей и уменьшает габариты двигателя вдоль оси цилиндров 2.
Таким образом, предлагаемое техническое решение позволяет повысить удельные показатели двигателя за счет снижения массы корпусных деталей, а также повысить надежность работы механизма за счет снижения в нем нагрузок.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2018008C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2019722C1 |
| ОППОЗИТНЫЙ ДВИГАТЕЛЬ СО ВСТРЕЧНО ДВИЖУЩИМИСЯ РАБОЧИМИ ОРГАНАМИ | 1992 |
|
RU2044905C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ И КРИВОШИПНЫЙ МЕХАНИЗМ | 1992 |
|
RU2018007C1 |
| ОППОЗИТНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ И ЕГО КОЛЕНЧАТЫЙ ВАЛ | 1992 |
|
RU2018006C1 |
| ОППОЗИТНЫЙ ЧЕТЫРЕХТАКТНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2027035C1 |
| АКСИАЛЬНО-ПОРШНЕВАЯ МАШИНА | 1993 |
|
RU2067677C1 |
| АКСИАЛЬНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1993 |
|
RU2067675C1 |
| АКСИАЛЬНЫЙ ДВИГАТЕЛЬ | 1993 |
|
RU2067676C1 |
| ЧЕТЫРЕХТАКТНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2028471C1 |
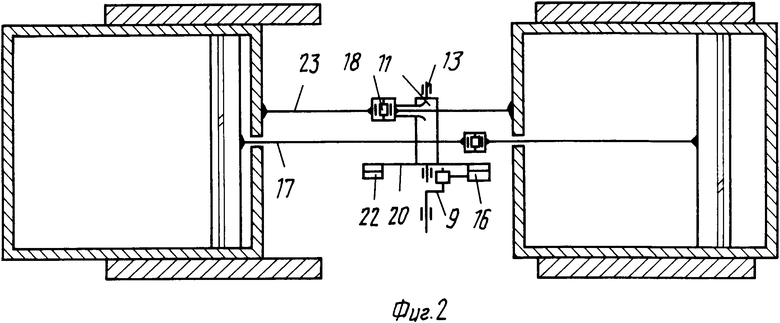
Использование: двигателестроение, а именно двигатели внутреннего сгорания с возвратно-поступательным перемещением соосно расположенных рабочих органов. Сущность изобретения: возвратно-поступательное перемещение жестко связанных между собой поршней 6 передается качающемуся свободно на оси 13 силовому трехплечему рычагу 11, а перемещение в противоположную сторону подвижных втулок 3, соединенных с головками 4 и днищами 5, (во втулках расположены поршни 6) передается качающемуся на оси 14 дополнительному рычагу 12. Рычаги 11 и 12 синхронизированы при помощи тяги 22, соединяющей их плечи 20 и 21, а качание рычагов 11 и 12 преобразуется во вращение кривошипа 9 за счет связи плеча 15 с шатунной шейкой 10 кривошипа 9 при помощи шатуна 16. Движение втулок 3 и поршней 6 в противофазе позволяет уравновесить двигатель, уменьшить массу корпусных деталей и снизить инерционные нагрузки в механизме. 4 з.п. ф-лы, 4 ил.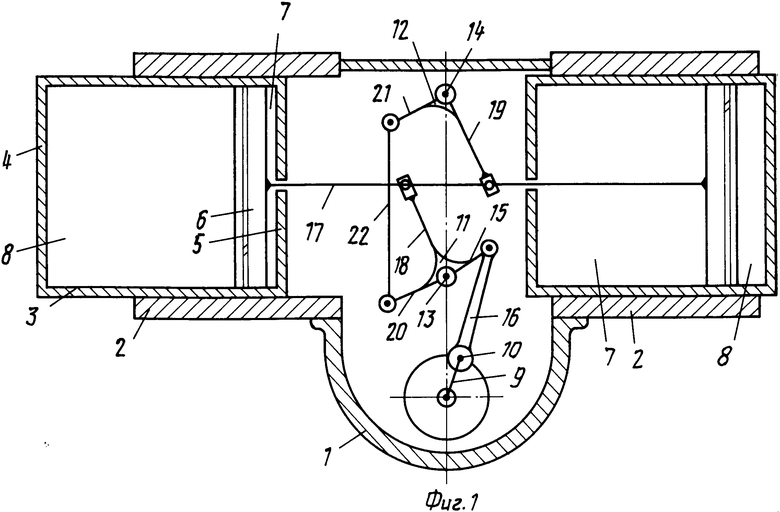
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 1762614, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
