Изобретение относится к горной автоматике, более конкретно к средствам автоматического контроля угла наклона добычных и проходческих комбайнов, и может быть использовано при автоматизации процессов добычи или проходки в угольных, железорудных, соляных и других шахтах при подземной добыче и проходке, а также для измерения углов наклона роторных экскаваторов, перегружателей, забойных и подъемных конвейеров и других горных машин.
Известно устройство для одновременного измерения угла между вектором силы тяжести и осью, перпендикулярной к корпусу, и угла между проекцией вектора силы тяжести на плоскость, расположенную под прямым углом напротив перпендикулярной оси, и осью, являющейся подвижной относительно корпуса и расположенной в этой плоскости, содержащее преобразователь, имеющий постоянный прямой магнит, который установлен на свободном конце плеча маятника, четыре соленоида, образующих две пары дифференциально включенных магнитопроводов для магнитного потока постоянного магнита, в котором четыре соленоида расположены симметрично относительно нейтрального положения плеча маятника, которой позволяет определять угол наклона приборов в буровых скважинах [1].
Недостатком известного устройства является невозможность его использования для измерений малых углов наклона.
Известен датчик угла наклона горной машины, содержащий корпус с опорой, регистрирующий блок и маятниковый узел, выполненный в виде двуплечего рычага с грузом на его нижнем плече и компенсатора возмущений, установленного перпендикулярно оси подвеса и качания на верхнем плече, который для обеспечения измерения малых углов наклона снабжен направляющей, в которой закреплен компенсатор возмущений, при этом массу компенсатора возмущений и длину верхнего плеча двуплечего рычага выбирают из соотношения Ркl = РгL - Мт αз-I = 4 π2 f2 νΣ - Mт αз-I , где Рк - масса компенсатора возмущений; Рг - масса груза; l, L - длины верхнего и нижнего плеч двуплечего рычага; Мт - момент трения в опоре закрепления датчика; αз - статическая точность (угол застоя) датчика наклона; f - минимальная частота компенсирующих возмущений; νΣ - суммарный момент инерции компенсатора возмущений и груза относительно оси качания [2].
Недостатками известного датчика являются низкая точность измерения угла наклона из-за малой чувствительности и низкая надежность устройства по внезапным отказам из-за высокой сложности.
Целью изобретения является повышение точности измерений за счет увеличения чувствительности при одновременном повышении надежности за счет упрощения.
Цель достигается тем, что датчик угла наклона горной машины, содержащий корпус с грузом и регистрирующий блок, снабжен двумя эластичными упругими шнурами, каждый из которых выполнен в виде петли нити из электропроводной резины, помещенной в изоляционную эластичную оболочку, например из резины или латекса, причем регистрирующий блок выполнен в виде двух омметров, выходы которых соединены с входами измерителя разности, при этом одни концы шнуров прикреплены к противоположным сторонам груза без электрического контакта нитей с грузом, а другие концы шнуров с натягом закреплены на противоположных стенках корпуса, нити пропущены через стенки без электрического контакта с корпусом, а свободные концы нитей соединены с входами омметров.
Изобретательский акт при создании датчика заключается в преодолении технического противоречия, сущность которого состоит в следующем. Для повышения точности обычно прибегают к введению новых блоков: стабилизации напряжения питания или температуры, фильтрации сигнала от шумов, измерения влияющего параметра и введения коррекции и т.д. При этом одновременно с повышением точности устройство усложняется и снижается надежность его работы. С другой стороны, для повышения надежности работы путем упрощения за счет исключения вспомогательных блоков и узлов получают в результате снижение точности измерений. В настоящем датчике это техническое противоречие преодолено - точность повышена при одновременном упрощении датчика и увеличении надежности его работы. Для преодоления технического противоречия необходимы и достаточны все отличительные признаки датчика: 1) два эластичных упругих шнура; 2) каждый из эластичных упругих шнуров выполнен в виде петли нити из электропроводной резины, помещенной в изоляционную эластичную оболочку, например из резины или латекса; 3) регистрирующий блок выполнен в виде двух омметров, выходы которых соединены с входами измерителя разности; 4) одни концы шнуров прикреплены к противоположным сторонам груза без электрического контакта нитей с грузом; 5) другие концы шнуров с натягом закреплены на противоположных стенках корпуса; 6) нити пропущены через стенки без электрического контакта с корпусом; 7) свободные концы нитей обоих шнуров соединены с входами омметров. Все 7 отличительных признаков сформулированы конкретно в смысле однозначности выполняемых ими функций. Одновременно все 7 отличительных признаков сформулированы общо, чтобы конструктор имел возможность варьировать в нужных направлениях конкретные видоизменения признаков при сохранении неизменными функций этих признаков, то есть все признаки свободны от конкретных несущественных для достижения цели ограничений. Ни один из 7 отличительных признаков неизвестен даже по отдельности сам по себе ни в каких датчиках угла наклона, и ни один из признаков не мог служить ранее в датчиках наклона для преодоления технического противоречия. Из приведенного ниже описания датчика с однозначностью следует, что при исключении из датчика любого из 7 отличительных признаков техническое противоречие в датчике не будет преодолеваться. Замена любого из 7 отличительных признаков на эквивалентный признак невозможна из-за формулировки признаков общо. Поэтому совокупность 7 отличительных признаков датчика соответствует критериям "Новизна" и "Существенные отличия", а датчик соответствует изобретательскому уровню.
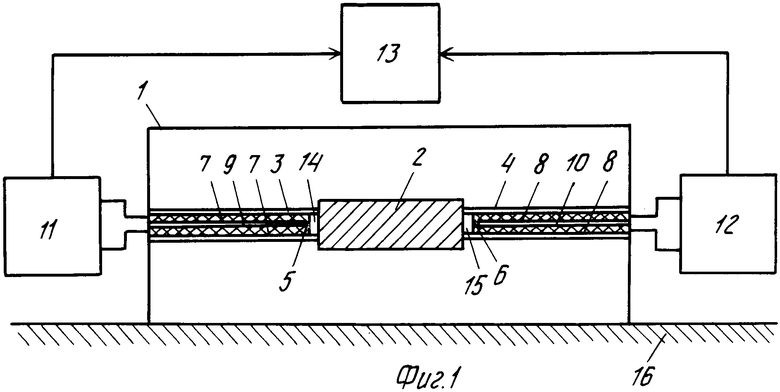
На фиг. 1 показана схема датчика при горизонтальном положении горной машины; на фиг. 2 - то же, при вертикальном положении горной машины.
Датчик угла наклона горной машины содержит корпус 1 с грузом 2 и регистрирующий блок.
Датчик снабжен двумя эластичными упругими шнурами 3 и 4, каждый из которых выполнен в виде петель 5 и 6 нитей 7 и 8 из электропроводной резины, помещенной в изоляционную эластичную оболочку 9 и 10, например из резины или латекса. Регистрирующий блок выполнен в виде двух омметров 11 и 12, выходы которых соединены с входами измерителя 13 разности. Одни концы шнуров 3 и 4 прикреплены к противоположным сторонам груза 2 без электрического контакта нитей 7 и 8 с грузом, для чего петли 5 и 6 прикреплены к грузу через изоляторы 14 и 15, например из изоляционного клея. Другие концы шнуров 3 и 4 с натягом закреплены на противоположных стенках корпуса 1, нити 7 и 8 пропущены через стенки без электрического контакта с корпусом 1, а свободные концы нитей 7 и 8 соединены с входами омметров 11 и 12.
Корпус 1 закреплен неподвижно на горной машине 16 так, что шнуры 3 и 4 через груз 2 устанавливаются в близкие к горизонтальным положения при горизонтальном положении горной машины 16 (фиг. 1).
Натяг шнуров 3 и 4 выполнен так, чтобы при вертикальном положении корпуса 1 шнур 3 еще оставался немного растянутым, а шнур 4 был растянут на величину максимального удлинения Δ lм и еще не выходил за пределы упругой деформации.
Работа датчика осуществляется следующим образом.
При горизонтальном положении горной машины 16 и корпуса 1 оба шнура 3 и 4 имеют одинаковую длину. Нити 7 и 8 из электропроводной резины также имеют одинаковую длину. Сопротивление каждой из нитей равно произведению удельного сопротивления нити ρ на длину нити l и обратно пропорционально поперечному сечению нити S, то есть равно
R = ρ l/S, (1) сопротивления нитей 7 и 8 согласно формуле (1) записывают соответственно в виде
R7 = l7 ρ /S7, (2)
R8 = l8 ρ /S8. (3)
Согласно формулам (2) и (3) при одинаковых длинах нитей 7 и 8 для горизонтального положения горной машины 16 и корпуса 1 сопротивления Р7и Р8 также будут одинаковыми. Одинаковыми будут и сигналы на выходах омметров 11 и 12, измеряющих эти сопротивления нитей. В результате на выходе измерителя 13 разности будет нулевой сигнал, соответствующий углу наклона горной машины, равному 0о, то есть горизонтальному положению горной машины.
Если горная машина 16 наклоняется и правая сторона корпуса 1 поднимается, то начинает растягиваться шнур 4 и сокращаться шнур 3. При этом удлиняется нить 8 и соответственно укорачивается нить 7. В результате сопротивление нити 8 увеличивается, а сопротивление нити 7 уменьшается. Чем больше угол наклона, тем больше длина нити 8 и меньше длина нити 7. Когда горная машина 16 станет вертикально (фиг. 2), нить 8 удлинится на максимальную величину, а нить 7 уменьшится по длине также на максимальную величину. Сопротивление нити 8 станет максимальным R8' = макс, а сопротивление нити 7 станет минимальным R7' = мин. Измеритель 13 разности при этом покажет максимальный разностный сигнал Хмакс = R8' - R7', соответствующий углу наклона горной машины +90о.
При наклоне горной машины 16 в другую сторону будет постепенно по мере увеличения угла наклона увеличиваться сопротивление нити 7 и одновременно уменьшаться сопротивление нити 8. Когда машина станет в вертикальное положение, соответствующее углу наклона -90о, то сопротивление нити 7 станет максимальным R7'' = макс, а сопротивление нити 8 станет минимальным R8'' = мин. При этом измеритель разности покажет минимальный сигнал (то есть на его выходе сформируется максимальное отрицательное значение) Хмин = R8'' - R7''.
При увеличении длины соответствующей нити в К раз от l до Kl одновременно уменьшается сечение нити также в К раз от S до S/K, так как нить работает в пределах упругих деформаций, при которых в любой момент времени объем нити остается постоянным. Поэтому при увеличении длины нити от l до Kl и одновременном уменьшении сечения нити от S до S/K ее сопротивление согласно (1) увеличится от R до RK2. Поэтому, например, двукратное увеличение длины нити приведет к увеличению ее сопротивления в 4 раза, а К-кратное увеличение длины приведет к K2-кратному увеличению сопротивления. В этом первое существенное преимущество датчика.
Нити 7 и 8 выполнены в виде петель, поэтому длина нити 7 или 8 равна удвоенной длине шнура 3 или 4 и при удлинении шнура на Δ l длина нити увеличивается на 2 Δ l. Таким образом при удлинении (или при укорочении) нити абсолютный прирост длины нити равен удвоенному абсолютному приросту длины шнура. В результате этого абсолютный прирост сопротивления нити будет пропорционален удвоенному приросту длины шнура. Увеличение абсолютного значения прироста сопротивления при удлинении шнура приведет к увеличению вдвое прироста показаний омметра 11 или 12. В этом второе существенное преимущество датчика.
Результатом измерения являются показания измерителя 13 разности, который в любой момент времени показывает величину, пропорциональную значению Х = R8 - R7. Если при удлинении одной нити одновременно укорачивается вторая нить, то значение разности будет расти, во-первых, за счет увеличения R8 и, во-вторых, за счет уменьшения R7, или наоборот. В этом третье преимущество датчика перед известными датчиками наклона горных машин.
Таким образом, за счет увеличения относительного значения сопротивления в К2 раз при увеличении длины в К раз, за счет увеличения абсолютного прироста сопротивления нити в 2 раза, за счет выполнения нити в виде петли, за счет увеличения разности R8 - R7 из-за одновременного увеличения первого слагаемого и уменьшения второго слагаемого датчик обеспечивает очень высокую чувствительность к углу наклона.
Для приведения в однозначное соответствие показаний измерителя разности Х в единицы угла наклона датчик градуируют. Для этого приводят таблицу пересчета или шкалу измерителя 13 разности в единицы угла наклона. Метод градуировки в простейшем случае предусматривает приведение в однозначное соответствие нескольких точек шкалы Х в единицы угла наклона. На выходе измерителя разности должен быть показывающий прибор с нулем посередине: положительные значения сигнала будут соответствовать наклону горной машины в одну сторону, а отрицательные - в другую.
В датчике наклона горной машины шнуры 3 и 4 с нитями 7 и 8 внутри одновременно выполняют несколько функций: роль преобразователей угла наклона в единицы сопротивления; роль элементов передачи единиц электрического сопротивления к омметрам 11 и 12; роль пружин для удержания в равновесии груза 2 при любых наклонах горной машины и для возвращения груза 2 в исходное положение после выравнивания положения горной машины. За счет совмещения в шнурах 3 и 4 троякого рода выполняемых ими функций достигнуто как значительное увеличение чувствительности к углу наклона и пропорциональное чувствительности повышение точности измерения угла наклона, так и значительное упрощение датчика. Таким образом в датчике совокупность всех отличительных признаков позволила преодолеть техническое противоречие и одновременно и повысить точность измерения за счет увеличения чувствительности, и повысить надежность работы датчика за счет упрощения.
Отметим еще одну особенность датчика. Сигналы с омметров 11 и 12 могут быть использованы для определения вибраций горной машины по амплитуде переменной составляющей сигнала с соответствующего омметра. На выходе измерителя разности значение переменной составляющей сигналов с омметров будет удваиваться и поэтому по переменной составляющей сигнала с выхода измерителя разности также можно судить об амплитуде вибраций горной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА НАКЛОНА ПОДВИЖНОГО ОБЪЕКТА | 1992 |
|
RU2069310C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ СКОРОСТИ ШАХТНОЙ ВЕНТИЛЯЦИИ | 1992 |
|
RU2047779C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ТОЛЩИНЫ СЛОЯ ПЕНЫ И УРОВНЯ ПУЛЬПЫ В КАМЕРЕ ФЛОТОМАШИНЫ | 1992 |
|
RU2006290C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННОЙ ВИБРАЦИИ | 1992 |
|
RU2025671C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВРАЩЕНИЯ ГОРНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2034145C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ СКОРОСТИ ШАХТНОЙ ВЕНТИЛЯЦИИ | 1992 |
|
RU2018688C1 |
| СПОСОБ КОНТРОЛЯ ВЫСОТЫ УПЛОТНЕННОЙ ПОСТЕЛИ В ОТСАДОЧНОЙ МАШИНЕ | 1992 |
|
RU2026743C1 |
| РЕЗИСТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ | 1992 |
|
RU2097684C1 |
| РАСХОДОМЕР ПЕРЕМЕННОГО УРОВНЯ | 1992 |
|
RU2029242C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ СКОРОСТИ ШАХТНОЙ ВЕНТИЛЯЦИИ | 1992 |
|
RU2018687C1 |

Изобретение относится к горной автоматике и предназначено для автоматического контроля угла наклона добычных и проходческих комбайнов для измерения углов наклона роторных экскаваторов, перегружателей, забойных и подъемных конвейеров и других горных машин. Сущность изобретения: датчик содержит корпус с грузом, регистрирующий блок и два эластичных упругих шнура. Каждый из шнуров выполнен в виде петли нити из электропроводной резины, помещенной в изоляционную оболочку, эластичную упругую, например из резины или латекса. Регистрирующий блок выполнен в виде двух омметров, выходы которых соединены с входами измерителя разности. Одни концы шнуров прикреплены к противоположным сторонам груза без электрического контакта нитей с грузом, а другие концы шнуров с натягом закреплены на противоположных стенках корпуса. Нити пропущены через стенки без электрического контакта с корпусом. Свободные концы нитей соединены с входами омметров. Шнуры с нитями внутри одновременно выполняют роли преобразователей угла наклона в единицы сопротивления, элементов передачи единиц электрического сопротивления к омметрам и пружин для удержания в равновесии груза при любых наклонах машины и для возвращения груза в исходное положение. 2 ил.
ДАТЧИК УГЛА НАКЛОНА ГОРНОЙ МАШИНЫ, содержащий корпус с грузом и регистрирующий блок, отличающийся тем, что он снабжен двумя эластичными упругими шнурами, каждый из которых выполнен в виде петли нити из электропроводной резины, помещенной в изоляционную эластичную упругую оболочку, например, из резины или латекса, а регистрирующий блок выполнен в виде двух омметров, выходы которых соединены с входами измерителя разности, при этом одни концы шнуров прикреплены к противоположным сторонам груза без электрического контакта нитей шнуров с грузом, а другие концы шнуров с натягом закреплены на противоположных стенках корпуса, нити шнуров пропущены через стенки без электрического контакта с корпусом, а свободные концы нитей шнуров соединены с входами омметров.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР N 1367569, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
