Изобретение относится к горной автоматике, конкретно к методам и средствам измерения параметров вращения горных объектов, и может быть использовано при измерениях моментов и скоростей вращения турбобуров, буровых ставов, приводов и редукторов горных машин для дистанционного и автоматического управления горными машинами.
Известен способ измерения скорости вращения горных машин, основанный на преобразовании измеряемой величины в электрическое напряжение и передаче сигнала к измерительному прибору по оптическому каналу с волоконным световодом, в котором получение электрического напряжения осуществляют воздействием инерционного элемента на пакет пьезоэлектрических пластин, а полученное электрическое напряжение подводят к электро-оптическому преобразователю, который изменяет оптическую плотность в зависимости от электрического внешнего напряжения, и далее световую энергию передают по волоконному световоду к измерительному прибору [1]
Недостатками известного способа являются высокая сложность реализации способа и низкая чувствительность к измеряемой величине из-за использования для получения электрического напряжения низкочувствительного пакета пьезоэлектрических пластин.
Известен способ измерения крутящего момента на валу, основанный на применении тензометрических преобразователей, включенных в тензометрический мост, на которые передают преобразованную упругими элементами деформацию вала, в котором используется компенсационный механизм с приведенным двигателем, реечной передачей и потенциометрическим преобразователем, с помощью которых компенсируется сила скручивания вала на тензометрические преобразователи [2]
Недостатком известного способа является низкая чувствительность, связанная с незначительными изменениями сопротивления тензометрических преобразователей при их деформации.
Известен датчик частоты вращения турбобура, содержащий полый цилиндрический корпус, внутри которого размещены контейнер с электронной аппаратурой, измерительный преобразователь, выполненный в виде скобы, размещенной вдоль стенок корпуса, стержень, соединенный с валом турбобура и установленный внутри скобы, который для повышения надежности снабжен изолирующим стаканом, заземляющим электродом с флажком, установленным с зазором по отношению к скобе, а стержень выполнен из изолирующего материала, причем заземляющий электрод установлен внутри стержня, а скоба закреплена в изолирующем стакане, размещенном между ней и корпусом контейнера, и соединена с электронной аппаратурой, при этом скоба выполнена из электропроводящего материала [3]
Недостатком известного устройства является его низкая точность измерений из-за малой чувствителности к частоте вращения.
Известен измерительный преобразователь угловой скорости, содержащий инерционный элемент в виде балочки с грузами на концах, центральная часть которой закреплена на валу электродвигателя, вращающего балочку с постоянной угловой скоростью в поперечной плоскости, на верхней поверхности балочки между центральной частью и грузами выполнены поперечные прорези, образующие упругие шарниры на балочке, при воздействии на измерительный преобразователь измеряемой угловой скорости, вектор которой направлен перпендикулярно оси вращения электродвигателя, к грузам прикладываются моменты сил, стремящиеся сместить их в направлении, параллельном оси вращения электродвигателя, благодаря высокой жесткости упругих шарниров измеряемая угловая скорость вызывает пропорциональные ей смещения грузов, которые измеряются с помощью оптических устройств, содержащих зеркальца, закрепленные на внешних поверхностях грузов, источник света, направляющие световые пучки на зеркальца и фотоприемники, регистрирующие отраженный от зеркалец свет [4]
Недостатками известного измерительного преобразователя являются его высокая сложность, большая стоимость и низкая надежность работы по внезапным отказам из-за высокой сложности.
Известен способ измерения скорости вращения, основанный на отклонении вращающихся на валу под действием центробежной силы грузов и уравновешивание центробежной силы силой упругости пружины, в котором перемещение пружины передается перемещаемой вдоль оси вала муфте, перемещение которой рычажным механизмом передается на стрелочный механизм [5]
Недостатком известного способа является низкая точность из-за малой чувствительности к скорости вращения при низкой надежности работы из-за наличия рычажного и стрелочного механизмов.
Известен способ измерения момента на вращающемся валу, основанный на преобразовании кручения вала в электрический сигнал с помощью прикрепления к деформирующемуся участку вала нескольких тензорезисторов и преобразования деформации кручения вала в деформацию изгиба тензорезисторов [6]
Недостатком известного способа является низкая точность измерения момента вращения из-за малых изменений сопротивлений тензорезисторов при их деформации.
Известно устройство для измерения момента вращения бурового става, цилиндрический хвостовик которого жестко связан с вращателем, содержащее преобразователь угла, соединенный с входами узла контроля, включающего источник питания и блок вычисления момента, подключенный к индикатору, в котором для повышения точности узел контроля снабжен датчиком угловой скорости вращения бурового става и измерителем временных интервалов, а преобразователь угла выполнен в виде двух нормально разомкнутых магнитоуправляемых контактов, расположенных на жестко прикрепленном к вращателю кронштейне, а два постоянных магнита расположены на одной образующей цилиндрического хвостовика бурового става с возможностью взаимодействия с соответствующим магнитоуправляемым контактом, при этом выходы источника питания соединены с первыми входами магнитоуправляемых контактов, вторые выводы которых подключены к соответствующим входам измерителя временных интервалов, выход измерителя временных интервалов соединен с первым, а выход датчика угловой скорости вращения бурового става с вторым входами блока вычисления момента [7]
Недостатками известного устройства являются низкая точность из-за малой чувствительности к моменту вращения и низкая надежность работы по внезапным отказам из-за высокой сложности.
Известен измеритель крутящего момента, содержащий механическое передаточное устройство в виде колеса с внутренней цилиндрической ступицей, в сквозном продольном отверстии которой закреплен выходной вал, и с внешним кольцевым ободом, соединенным со ступицей четырьмя радиально расположенными упругими балочками, кольцевой обод имеет четыре прилива с отверстиями, с помощью которых он соединяется с испытуемым объектом, например с ротором электродвигателя, в средних частях двух упругих балочек, имеющих относительно большие поперечные сечения, выполнены разрезы под углом 45о относительно их продольных осей, эти разрезанные упругие балочки выполняют роль защитных упоров при перегрузках измерителя, две другие упругие балочки, расположенные диаметрально противоложным образом, выполняют функции упругих элементов измерителя, под воздействием измеряемого крутящего момента они изгибаются и внешний кольцевой обод поворачивается относительно ступицы на некоторый угол, пропорциональный крутящему моменту, этот угол измеряется с помощью индуктивного датчика угловых перемещений [8]
Недостатком известного устройства является низкая точность измерения момента вращения из-за низкой чувствительности индуктивного датчика угловых перемещений, который и измеряет в конечном счете момент.
Целью изобретения является повышение точности измерения параметров вращения горных объектов за счет увеличения чувствительности к измеряемому параметру при одновременном упрощении измерений.
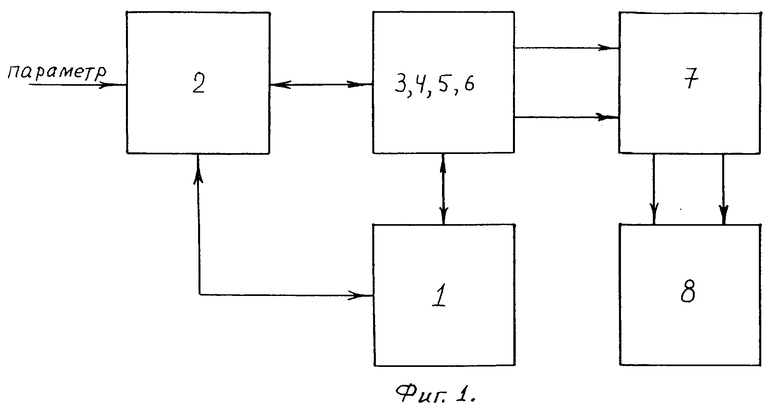
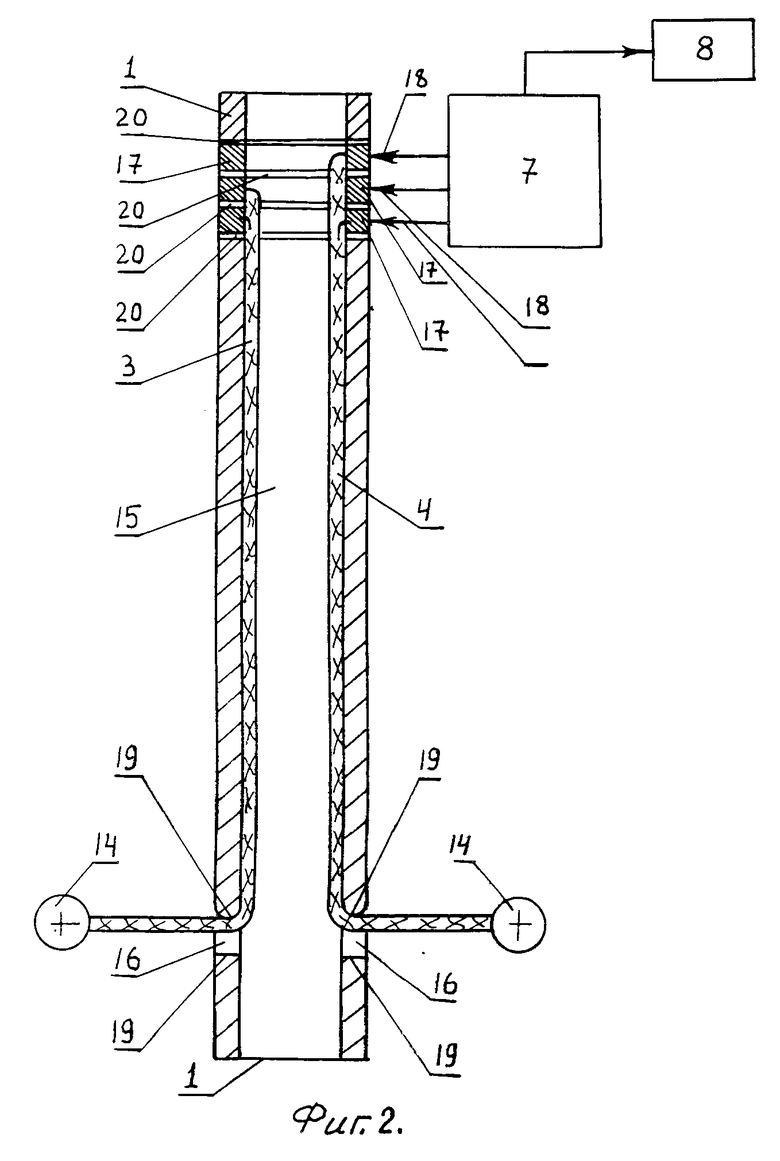
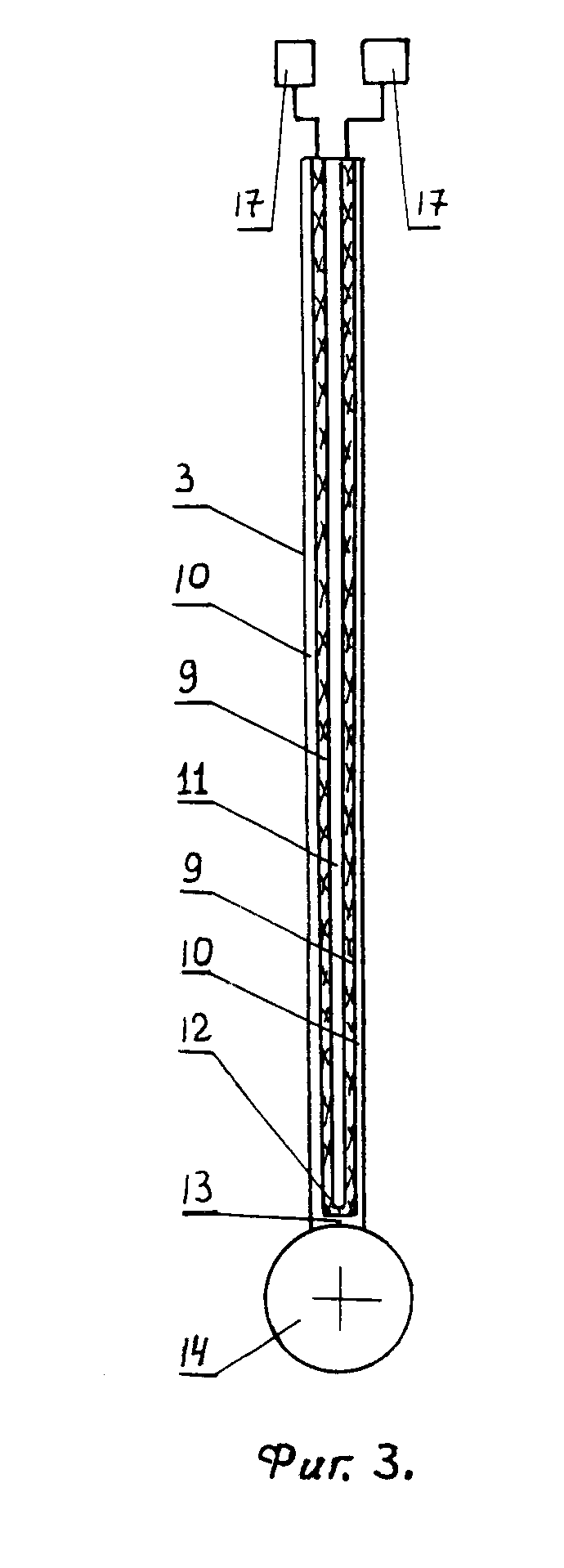
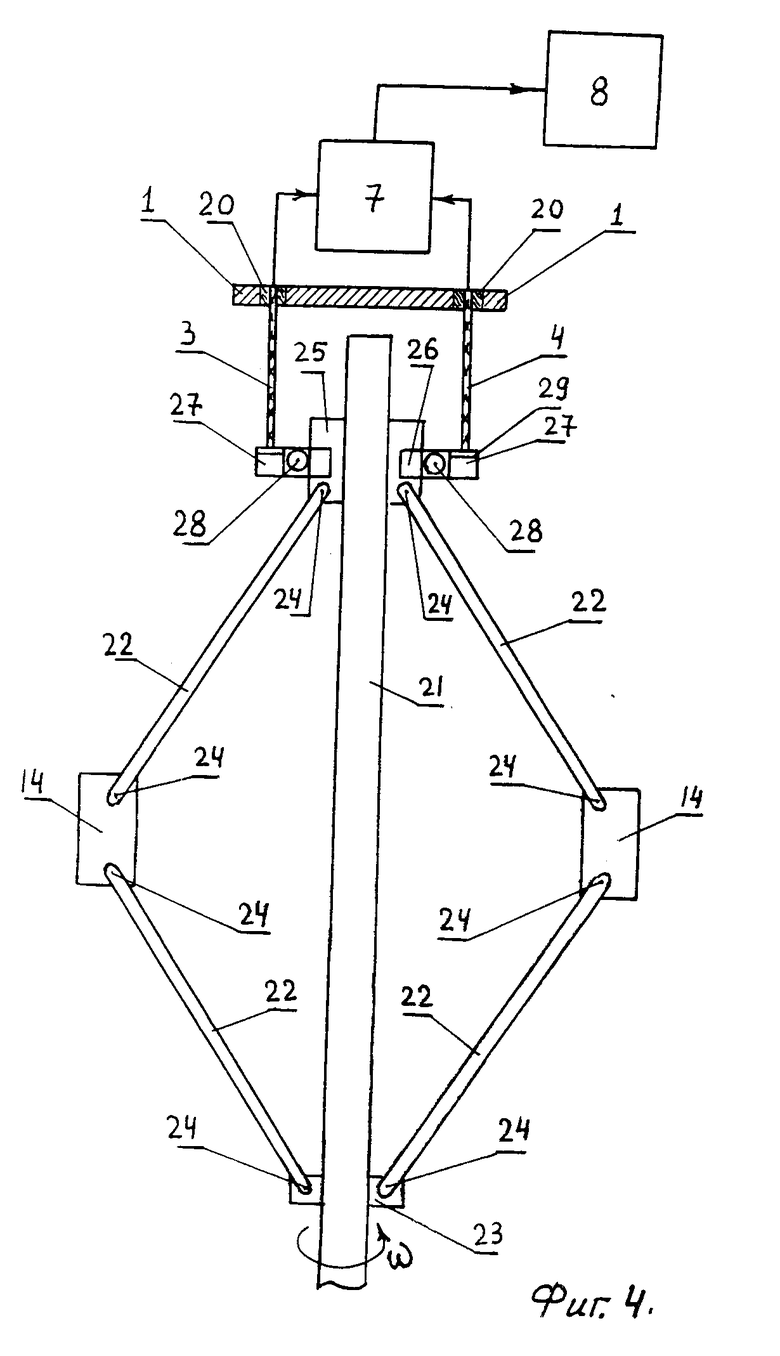
На фиг.1 показана схема устройств для измерения параметров вращения горных объектов; на фиг.2 устройство для измерения скорости вращения вала с пустотелым концом вала и двумя грузами; на фиг.3 петля нити, прикрепленная к грузу и соединение нитей с контактными кольцами, разрез; на фиг.4 устройство для измерения скорости вращения вала с двумя грузами и шарнирными рычагами; на фиг. 5 то же, с четырьмя грузами и двумя крестовинами; на фиг.6 то же, с кольцевым грузом и четырьмя нитями, продольный разрез; на фиг. 7 кольцевой груз с осью и двумя нитями, разрез; на фиг.8 устройство для измерения момента на вращающемся валу со специальным шкивом; на фиг.9 схема включения стержней устройства в мостовую схему обработки информации; на фиг.10 устройство для измерения момента на вращающемся валу с двумя нитями в качестве чувствительных элементов; на фиг.11 схема блока обработки информации.
Устройство для измерения параметров вращения горных объектов (фиг.1) содержит корпус 1, преобразователь 2 воздействия параметра вращения (скорости вращения или момента вращения) в одновременную деформацию растяжения-сжатия чувствительных элементов 3, 4, 5 и 6, выходы которых через блок 7 обработки информации соединены с входами блока 8 индикации и регистрации. Между чувствительными элементами 3, 4, 5 и 6, преобразователем 2 и корпусом 1 существуют двухсторонние механичесие связи, показанные сплошными линиями со стрелками на обоих концах (фиг.1).
Устройство для измерения скорости вращения вала (фиг.2 и 3) содержит корпус 1 (полая часть, скорость вращения которого измеряется), блок 7 обработки информации в виде омметра и блок 8 индикации и регистрации. Каждый чувствительный элемент выполнен в виде петли нити 9, помещенной в изоляционную оболочку 10 из эластичного упругого материала, с изоляцией половин нитей 9 друг от друга изоляционной перегородкой 11 из упругого эластичного материала и с изоляцией торца 12 нити 9 от окружающей среды изолятором 13. Преобразователь устройства выполнен в виде грузов 14, прикрепленных к торцам 12 петель нитей 9. Конец вращающегося вала 1 выполнен с полостью 15 и радиальными отверстиями 16 и контактными кольцами 17. Свободные концы петель нитей 9 пропущены через радиальные отверстия 16 в вале 1 и изнутри вала подсоединены к кольцам 17 с последовательным соединением петель нитей 9 друг с другом. При этом щетки 18 соединены с омметром (7). Отверстия 16 имеют округленные края 19 со стороны колец и щеток. Кольца 17 изолированы друг от друга и от вала 1 изоляторами 20.
Устройство для измерения скорости вращения вала (фиг.4) содержит вал 21, омметр 7 и блок 8 индикации и регистрации. Преобразователь устройства выполнен в виде грузов 14, одни концы которых шарнирными рычагами 22 соединены с приливами 23 вала на шарнирах 24, другие концы грузов 14 шарнирными рычагами 22 связаны с перемещающейся вдоль вала скользящей муфтой 25 на шарнирах 24. На муфту 25 надет подшипник качения из внутреннего 26 и наружного 27 колец и шариков 28 между ними. К наружному кольцу 27 прикреплена шайба 29. Одни концы нитей (элементов 3 и 4) прикреплены к шайбе 29, а другие концы нитей жестко прикреплены к корпусу 1, установленному неподвижно у торца вала 21, с изоляцией от корпуса 1 изоляторами 20. Свободные концы нитей (3 и 4) подключены к входам омметра 7. Нити 3 и 4 соединены последовательно через проводящую шайбу 29.
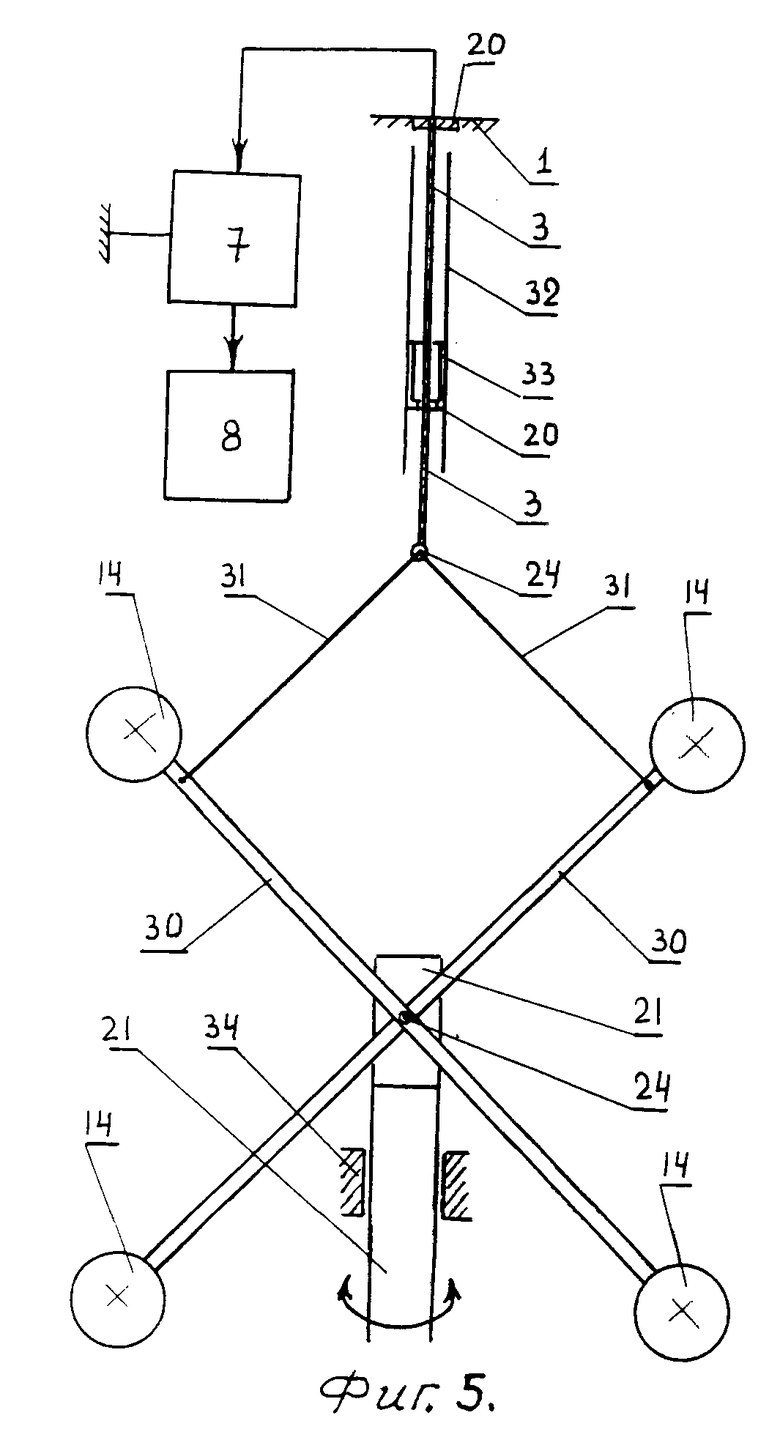
Устройство для измерения скорости вращения вала (фиг.5) состоит из вала 21, омметра 7 и блока 8 индикации и регистрации. Преобразователь устройства выполнен в виде четырех грузов 14, прикрепленных к концам двух крестовин 30 симметрично относительно оси вала 21, двух шарнирных тяг 31 на шарнирах 24 и установленного по оси вала цилиндра 32 со свободно перемещающимся в нем поршнем 33. Одни концы тяг 31 шарнирно прикреплены к концам крестовин 30, а другие концы тяг 31 скреплены шарниром 24 и прикреплены к одному концу нити 3, пропущенной через поршень 33 с изоляцией от поршня и с перемещением вместе с ним. Другой конец нити 3 прикреплен к неподвижному корпусу 1 с изоляцией от корпуса изолятором 20. Конец нити 3 соединен с входом омметра 7, второй вход которого, как и второй конец нити 3, заземлен. Вал 21 вращается в подшипнике 34.
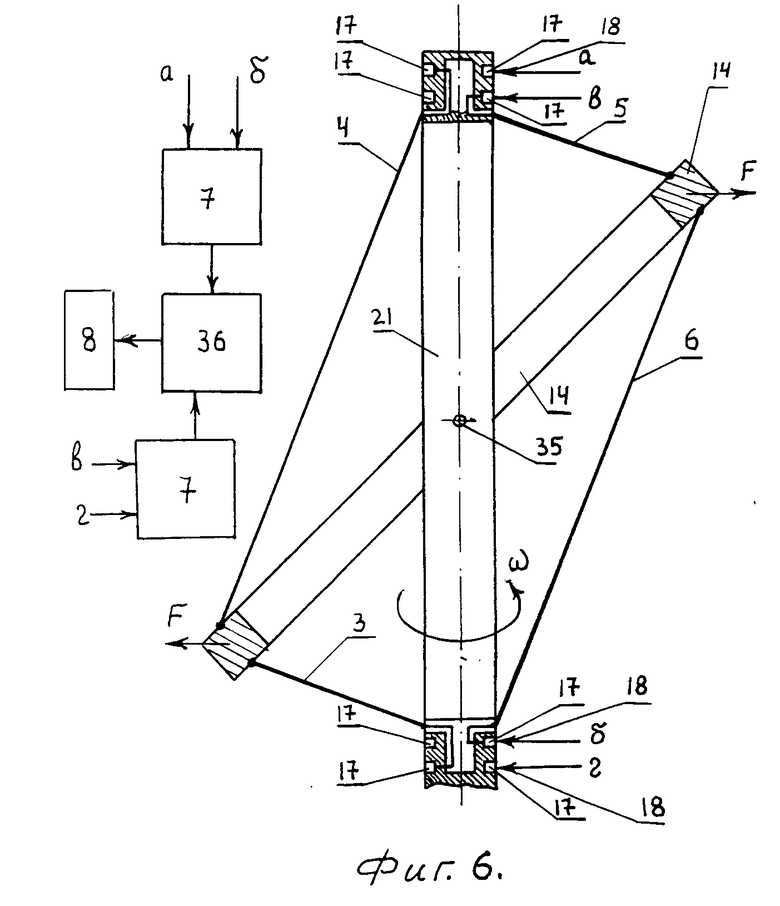
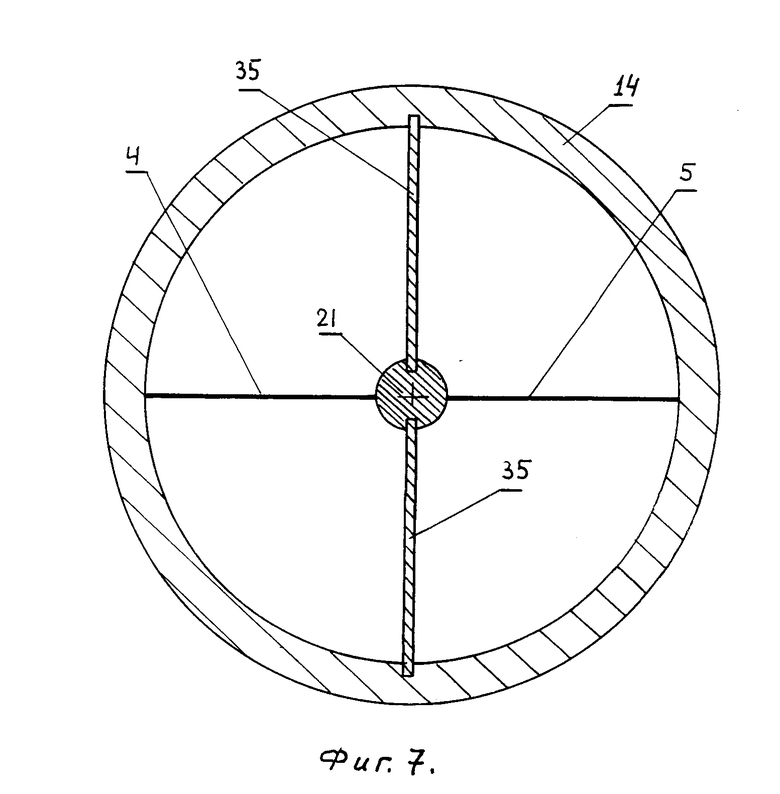
Устройство для измерения скорости вращения вала (фиг.6 и 7) содержит вращающийся вал 21 и блок 8 индикации и регистрации. Преобразователь устройства выполнен в виде кольцевого груза 14, связанного с валом 21 шарнирной осью 35. Четыре нити (3, 4, 5 и 6) одними концами прикреплены к кольцу, а другими концами прикреплены к валу 21 (фиг.6). При этом нити попарно соединены последовательно: противолежащие нити 3 и 5 соединены последовательно друг с другом; другие противолежащие нити 4 и 6 также соединены последовательно друг с другом. Эти соединения обеспечены соединением одних концов всех нитей с кольцом и соединением других концов нитей с токосъемными кольцами 17. Блок обработки информации устройства выполнен в виде двух омметров 7, выходы которых соединены с входами измерителя 36 отношений. Концы пар последовательно соединенных нитей соединены через кольца 17 и щетки 18 с входами омметров 7. Выход измерителя 36 отношений соединен с входом блока 8 индикации и регистрации. Кольца 17 изолированы от вала 21 и друг от друга.
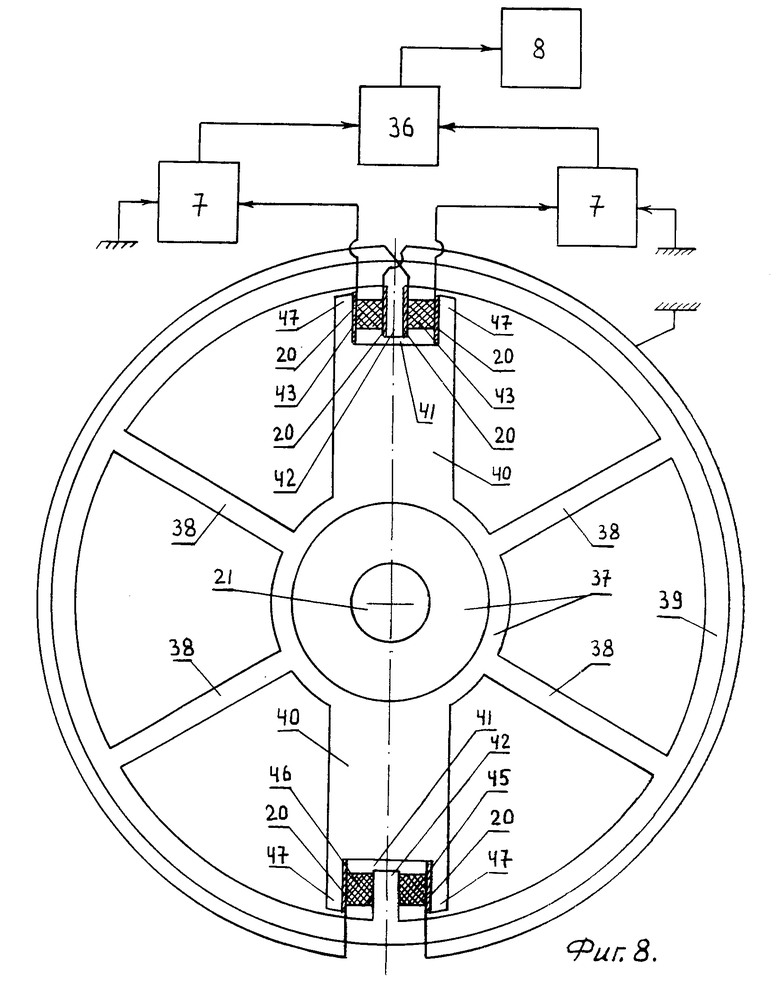
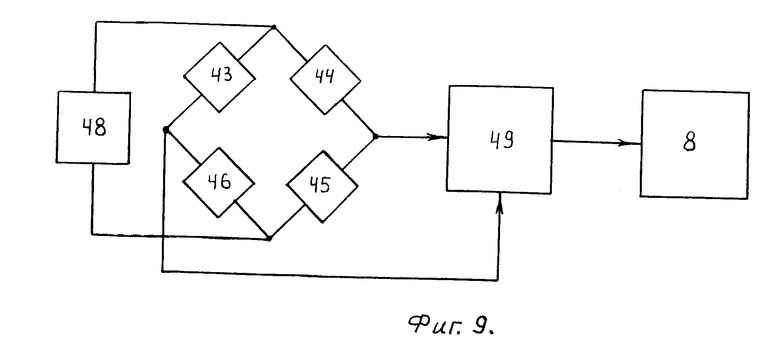
Устройство для измерения момента на вращающемся валу 21 (фиг.8) содержит блок обработки информации в виде двух омметров 7, выходы которых соединены с входами измерителя 36 отношений, выход которого соединен с входом блока 8 индикации и регистрации. Преобразователь устройства выполнен в виде специального шкива со ступицей 37, упругими спицами 38 и ободом 39. Две диаметрально противоположные спицы 40 выполнены жесткими и не соединены с ободом 39. Наружные концы жестких спиц 40 выполнены с углублениями 41. Обод 39 шкива выполнен с выступами 42 по середине углублений 41 без контакта выступов 42 с жесткими спицами 40. Четыре стержня 43, 44, 45 и 46 из электропроводящего эластичного упругого материала со сжатием вставлены в зазоре между выступами 42 и краями 47 углублений 41 в жестких спицах 40 и изолированы от выступов 42 и спиц 40 изоляторами 20. Накрест лежащие стержни 43-45 и 44-46 попарно последовательно соединены друг с другом, а их свободные концы соединены с входами блока обработки информации. На фиг.8 блок обработки информации выполнен в виде двух омметров 7, к входам которых подключены последовательно соединенные пары стержней 43-45 и 44-46, и измерителя 36 отношений. На фиг.9 блок обработки информации выполнен в виде мостовой схемы из стержней 43, 44, 45 и 46, источника 48 питания и усилителя 49. Для подсоединений в мостовую схему на фиг.9 стержни 45 и 46 дополнительно изолируются от выступа 42 изоляторами 20. Выход усилителя 49 соединен с входом блока 8 индикации и регистрации.
В устройстве для измерения момента вращения на вращающемся валу 21 (фиг. 10) преобразователь выполнен в виде двух жестко закрепленных на валу 21 на заданном расстоянии колец 50. К одному из них прикреплены два параллельных валу 21 кронштейна 51, а к второму кольцу прикреплен третий кронштейн 5, параллельный кронштейнам 51 и установленный между ними. Концы двух нитей 3 и 4 с натягом закреплены между кронштейнами 51 и 52 с изоляцией от кронштейнов 51 изоляторами 20. Эти изолированные концы нитей 3 и 4 соединены проводниками 53 с контактными кольцами 17 и через щетки 18 соединены с входами блока 54 обработки информации, выполненного, как и в устройстве на фиг.8, в виде двух омметров 7 и измерителя 36 отношений. Контактные кольца 17, как и в устройствах на фиг.2 и 6, изолированы от вала 21.
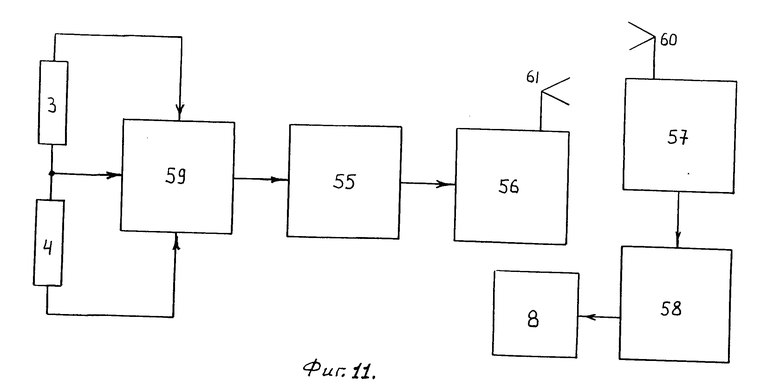
На фиг. 11 показана схема блока обработки информации для устройства по фиг.10. Блок обработки информации выполнен в виде генератора 55, соединенного с радиопередатчиком 56 с частотной модуляцией, которые установлены на вращающемся валу 21, и радиоприемника 57 с демодулятором 58, которые установлены неподвижно. Нити 3 и 4 включены в частотно-зависимую цепь 59 генератора 55. Радиоприемник и радиопередатчик снабжены соответственно приемной и передающей антеннами 60 и 61. Выход демодулятора 58 соединен с входом блока 8 индикации и регистрации.
В общем случае способ измерения параметров вращения горных объектов реализуется следующей последовательностью операций: воздействие контролируемого параметра вращения преобразуют в деформацию растяжения-сжатия чувствительных элементов из электропроводящего эластичного упругого материала; через чувствительные элементы пропускают электрический ток и измеряют сопротивление деформированных чувствительных элементов; о параметре вращения объекта судят по величине электрического сопротивления деформированных чувствительных элеметов из электропроводящего эластичного упругого материала.
В способе измерения скорости вращения горных объектов воздействие скорости вращения объекта преобразуют в центробежную силу грузов, а деформацию растяжения-сжатия чувствительных элементов из электропроводящего эластичного упругого материала получают уравновешиванием центробежной силы грузов силой упругости растягиваемых чувствительных элементов.
Для повышения точности при измерении момента на вращающемся валу воздействие момента через деформацию кручения преобразуют в деформацию растяжения-сжатия чувствительных элементов из электропроводящего эластичного упругого материала.
Работа устройства (фиг.1) осуществляется следующим образом.
Контролируемый параметр вращающегося объекта воздействует на преобразователь 2 воздействия параметра вращения. Преобразователь 2 и неподвижный корпус 1, к которым крепятся чувствительные элементы 3, 4, 5 и 6, преобразуют действие контролируемого параметра в деформацию растяжения-сжатия чувствительных элементов 3, 4, 5 и 6, через которые пропускают электрический ток, электрические сигналы поступают в блок 7 обработки информации, в котором электрические сигналы преобразуются в удобную форму и поступают в блок 8 индикации и регистрации, который индицирует и регистрирует значение контролируемого параметра вращения.
Работа показанного на фиг.2 и 3 устройства для измерения скорости вращения вала осуществляется следующим образом. При вращении вала 1 вместе с ним закручиваются и грузы 14, на которые начинает действовать центробежная сила F, прямо пропорциональная квадрату угловой скорости ω2, массе груза m и радиусу окружности вращения, который равен сумме начального радиуса d (расстояние от центра вала до центра груза 14 при нулевой угловой скорости вращения) и удлинения петли нити:
F m ω2(d + Δl) (1) Растяжение упругого шнура под действием центробежной силы грузов 14 происходят в пределах упругих деформаций, когда в любой момент времени объем нити 9 остается постоянным V πr2l const, то есть когда при удлинении нити 9 от l до (l + Δl) уменьшается радиус нити от r до (r Δr) так, что πr2 l (l + Δl) π(r Δr)2. Согласно закону Гука
Fp πr2 E Δl/l, (2) Fp растягивающая сила, Е модуль Юнга. При увеличении угловой скорости вращения вала 1 грузы 14 будут все больше расходиться в стороны, увеличивая радиус вращения путем удлинения нити 9. Состояние равновесия между положением грузов 14 и растяжением нитей 9 с оболочками 10 и перегордкой 11 установится в тот момент, когда центробежная сила F будет уравновешена силой упругости растянутого эластичного шнура, то есть когда силы по формулам (1) и (2) станут одинаковыми. Из равенства сил получают
m ω2(d + Δl)π Er2Δl(l)-1. (3)
Известно, что сопротивление любого проводника, каковым является и нить 9, пропорционально его длине l и удельному сопротивлению ρ и обратно пропорционально его поперечному сечению πr2. Для нерастянутой нити 9 ее сопротивление выразится формулой
Ro ρl/πr2. (4) С учетом постоянства объема нити 9 при ее растяжении ее сопротивление выразится в виде
R ρ(l + Δl)2/V. (5)
Определив из (4) площадь поперечного сечения нити и подставив это значение в (3), получают
mω2(d + Δl) E ρΔl(Ro)-1. (6) Определяют удлинение нити 9 из формулы (5) и подставляют это значение в формулу (6). Решив полученное выражение относительно угловой скорости, имеют выражение
ω  Eρ(-ρl+
Eρ(-ρl+ )
) mRo(dρ-ρl+
mRo(dρ-ρl+ . Из (7) видно, что величина электрического сопротивления нити 9 однозначно определяет угловую скорость вращения вала. Концы нитей 9 через контактные кольца 17 и щетки 18 подключены к входам омметров 7, которые в любой момент времени измеряют сопротивления нитей 9. По измеренным сопротивлениям нитей определяют угловую скорость вращения вала. Для приведения в однозначное соответствие сигналов на выходах омметра 7 со скоростью вращения устройство градуируют. Так как сопротивление нити 9 увеличивается пропорционально квадрату длины нити, то устройство обеспечивает высокую чувствительность к радиусу вращения грузов 14, то есть к величине угловой скорости вращения. За счет n-кратного по сравнению с известными устройствами повышения чувствительности соответственно в n раз увеличивается и точность измерения скорости вращения вала. Чтобы шнуры (элементы 3 и 4) легко вытягивались при растяжении из пустотелого вала, стенки отверстий 16 выполнены с закругленными краями 19 или вместо закруглений в местах выхода шнуров (элементов 3 и 4) устанавливают ролики. При использовании в качестве оболочки 10 изоляционной резины доста- точно выполнение отверстий со скруглением (краями 19). Нити 9 шнуров (элементов 3 и 4) могут быть соединены последовательно или параллельно друг с другом. В этом случае используется один омметр, сигнал на выходе которого будет пропорционален среднему квадрату длины двух нитей. В этом случае дополнительное повышение точности измерения скорости вращения вала обеспечивается за счет автоматического усреднения результатом из-за последовательного или параллельного соединения нитей шнуров (чувствительных элеметов 3 и 4). Съем информации от чувствительных элементов 3 и 4 к контактным кольцам здесь осуществляется без использования реохордов, движков, дифференциально-трансформаторных передач или других приспособлений. Непосредственный съем сигналов с преобразователей (элементов 3 и 4) обеспечивает повышение надежности работы устройства за счет его упрощения.
. Из (7) видно, что величина электрического сопротивления нити 9 однозначно определяет угловую скорость вращения вала. Концы нитей 9 через контактные кольца 17 и щетки 18 подключены к входам омметров 7, которые в любой момент времени измеряют сопротивления нитей 9. По измеренным сопротивлениям нитей определяют угловую скорость вращения вала. Для приведения в однозначное соответствие сигналов на выходах омметра 7 со скоростью вращения устройство градуируют. Так как сопротивление нити 9 увеличивается пропорционально квадрату длины нити, то устройство обеспечивает высокую чувствительность к радиусу вращения грузов 14, то есть к величине угловой скорости вращения. За счет n-кратного по сравнению с известными устройствами повышения чувствительности соответственно в n раз увеличивается и точность измерения скорости вращения вала. Чтобы шнуры (элементы 3 и 4) легко вытягивались при растяжении из пустотелого вала, стенки отверстий 16 выполнены с закругленными краями 19 или вместо закруглений в местах выхода шнуров (элементов 3 и 4) устанавливают ролики. При использовании в качестве оболочки 10 изоляционной резины доста- точно выполнение отверстий со скруглением (краями 19). Нити 9 шнуров (элементов 3 и 4) могут быть соединены последовательно или параллельно друг с другом. В этом случае используется один омметр, сигнал на выходе которого будет пропорционален среднему квадрату длины двух нитей. В этом случае дополнительное повышение точности измерения скорости вращения вала обеспечивается за счет автоматического усреднения результатом из-за последовательного или параллельного соединения нитей шнуров (чувствительных элеметов 3 и 4). Съем информации от чувствительных элементов 3 и 4 к контактным кольцам здесь осуществляется без использования реохордов, движков, дифференциально-трансформаторных передач или других приспособлений. Непосредственный съем сигналов с преобразователей (элементов 3 и 4) обеспечивает повышение надежности работы устройства за счет его упрощения.
На описанном выше принципе центробежных сил работает и показанное на фиг.4 устройство. При увеличении скорости вращения вала 21 увеличивается действующая на грузы 14 центробежная сила и грузы расходятся в стороны от оси вала 21. При этом рычаги 22 через шарниры 42 сдвигают вниз скользящую муфту 25. Муфта 25 вместе с надетым на нее шариковым подшипником и шайбой 29 растягивает нити (3 и 4). Раздвижка грузов 14 от оси вала 21 прекращается в то время, когда сила раздвижки грузов уравновешивается упругой силой растянутых нитей 3 и 4, так как другие концы нитей 3 и 4 неподвижно и жестко прикреплены к неподвижному корпусу 1. Нити 3 и 4 через металлическую шайбу 29 соединены последовательно друг с другом. Поэтому омметр 7, к входам которого подключены свободные концы нитей 3 и 4, в любой момент времени показывает суммарное электрическое сопротивление растянутых нитей 3 и 4. Чем больше скорость вращения вала 21, тем больше действующая на грузы 14 центробежная сила, тем сильнее грузы 14 отклоняются от оси вала 21, тем в большей степени растянуты нити 3 и 4 и тем большее сопротивление измеряет омметр. Квадратичная зависимость сопротивлений нитей 3 и 4 обеспечивает n-кратное увеличение чувствительности к скорости вращения вала и соответственно n-кратное повышение точности измерения скорости вращения вала по суммарному сопротивлению последовательно соединенных нитей. Благодаря специальному выполнению муфты 25 с шариковым подшипником и шайбой и соответствующего расположения корпуса 1 и закрепления нитей 3 и 4 между шайбой и корпусом в устройстве обеспечен съем сигнала на омметр без никаких механизмов и приспособлений, что приводит к упрощению и повышению надежности работы устройства по внезапным отказам.
Работа показанного на фиг.5 устройства осуществляется следующим образом. При увеличении скорости вращения вала 21 в подшипнике 34 грузы 14 под действием центробежной силы, пропорциональной квадрату скорости вращения вала, расходятся от оси вала. При этом угол между крестовинами 30 и валом 21 увеличивается, шарнирные тяги 31 через шарниры 24 вытягивают нить 3 вниз от корпуса 1. Как только центробежная сила на грузы 14 уравновесится упругой силой растянутой нити 3, наступает момет динамического равновесия. При дальнейшем увеличении скорости вращения увеличится длина нити 3, а при снижении скорости вращения вала 21 длина нити 3 будет уменьшаться. При изменениях длины нити 3 для обеспечения ее перемещений по прямой в устройстве имеются цилиндр и свободно перемещающийся в цилиндре 32 поршень 33, к которому через изолятор 20 прикреплена нить 3. При удлинениях-сокращениях нити 3 поршень 33 будет соответственно перемещаться вниз-вверх, обеспечивая линейность перемещений нити 3 и предупреждая возможные перекосы места соединения тяг 31 шарниром 24. Концы нити 3 подключены к входам омметра, который в любой момент времени показывает сопротивление растянутой нити 3. Величина сопротивления нити растет с ростом скорости вращения вала 21. Соединение одного конца нити 3 с конструкцией, которая заземлена, и заземление одного конца омметра позволили вместе с деталями (32, 33 и 20) обеспечить бесконтактный съем электрического сигнала с нити 3 на омметр 7. Квадратичная зависимость сопротивления нити от ее длины обеспечивает повышение точности, а специальная конструкция преобразователя обеспечивает упрощение и повышение надежности работы устройства.
Работа показанного на фиг.6 и 7 устройства осуществляется следующим образом. Кольцевой груз 14 с помощью нитей 3, 4, 5 и 6 предварительно устанавливается так, чтобы при неподвижном вале 21 кольцевой груз 14 был снизу и сверху поближе к валу 21. Положение груза 14 при этом уравновешивается силами натяжений четырех нитей 3, 4, 5 и 6. При закручивании вала 21 с увеличением скорости вращения вала кольцевой груз под действием центробежных сил стремится занять перпендикулярное к валу 21 положение: при этом нити 3 и 5 удлиняются, а нити 4 и 6 сокращаются. Условие динамического равновесия в любой момент времени наступает при компенсации центробежной силы на кольцевой груз 14 вектором сил натяжения четырех нитей. Нити 3, 4, 5 и 6 одними концами прикреплены к кольцевому грузу 14, а другими концами к контактным кольцам 18 и соединены с входами двух омметров 7 так, что нити 3 и 5 оказываются соединенными последовательно и подключенными к входам в и г нижнего на фиг.6 омметра, а нити 4 и 6 также оказываются соединенными последовательно и подключенными к входам а и б верхнего по схеме на фиг.6 омметра 7. Омметры 7 непрерывно измеряют сопротивления пар последовательно соединенных нитей 3-5 и 4-6, сопротивление первых из которых с ростом скорости вращения увеличивается, а других уменьшается. При изменениях скорости вращения вала 21 и изменениях положения кольцевого груза 14 он поворачивается вокруг оси 35, которая перпендикулярно валу 21 закреплена в нем. Сигналы с выходов омметров 7 подаются на входы измерителя 36 отношений. Если с ростом угловой скорости сопротивление нитей 3-5 увеличивается, то одновременно сопротивление нитей 4-6 уменьшается. В результате в измерителе 36 определяется частное сопротивлений элементов 3-5 и 4-6, которое растет и за счет увеличения сопротивлений элементов 3-5 и за счет уменьшения сопротивлений элементов 4-6; если сопротивления нитей 3 и 5 увеличатся в 3 раза, а сопротивления нитей 4 и 6 уменьшатся в 3 раза, то сигнал на выходе измерителя 36 отношений увеличится уже в 9 раз. Использование двух омметров и измерителя 36 отношений, а также специальное подключение пар нитей к омметрам позволяют в данном примере дополнительно увеличить чувствительность еще в 3 раза по сравнению с квадратичной зависимостью каждого сопротивления от длины и за счет этого в 3 раза увеличить точность измерений и дополнительно еще в 2 раза увеличить точность измерений за счет получения значений двух сопротивлений попарно последовательно соединенных нитей. Незначительное усложнение устройства за счет второго омметра и измерителя 36 дало возможность в 6 раз для рассматриваемого примера повысить точность, тогда как при классических скобах повышение точности в 2 раза достигается только более чем пятикратным усложнением устройства.
Работа показанных на фиг.8 и 9 устройств для измерения момента на вращающемся валу осуществляется следующим образом. На вал 21 насажен шкив из ступицы 37 упругих спиц 38 и обода 39, с которого снимается передаваемая валом 21 энергия. При этом обод 39 через упругие спицы 38 и ступицу 37 старается затормозить вращение вала 21. В результате благодаря упругости спиц 38 обод 39 закручивается относительно вала 21 на некоторый угол, являющийся мерой передаваемого валом 21 на обод 39 момента вращения. Для измерения этого момента в зазоры между выступами 42 обода 39 и краями 47 углублений 41 в жестких спицах 40 со сжатием вставлены стержни 43, 44, 45 и 46. При изменении угла закручивания обода 39 относительно вала 21 одна пара стержней сжимается (укорачивается), а вторая разжимается (удлиняется). При закручивании обода 39 относительно вала 21 против часовой стрелки сжимаются (укорачиваются) стержни 43 и 45 и удлиняются стержни 44 и 46. При закручивании по часовой стрелке происходит обратная картина: стержни 43 и 45 удлиняются, а стержни 44 и 46 укорачиваются. Стержни 43 и 45 соединены последовательно и подключены к входам левого на фиг.8 омметра 7. Стержни 44 и 46 также соединены последовательно и подключены к входам правого омметра 7. С ростом момента вращения растет угол закручивания, увеличиваются сопротивления стержней 43 и 45 и уменьшаются сопротивления стержней 44 и 46. В результате измеряемое измерителям 36 отношение сопротивлений последовательно соединенных стержней 43-45 и 44-46 будет расти в еще большей степени: если, например, сопротивление стержней 43-45 увеличится в 4 раза, а сопротивление стержней 44-46 уменьшится в 4 раза, то сигнал с выхода измерителя 36 увеличится уже в 16 раз. Здесь, как и в устройствах по фиг.6 и 7, происходит трехступенчатое повышение точности измерений: первое повышение точности обеспечивается квадратичной зависимостью сопротивления от длины стержней, второе повышение точности обеспечивается определением отношения, третье повышение точности обеспечивается за счет последовательных соединений пар стержней.
Работа устройства по фиг. 8 с блоком обработки информации по мостовой схеме на фиг. 9 осуществляется со следующими особенностями. Мостовая схема обеспечивает дифференциальный принцип измерений и позволяет компенсировать влияния флуктуаций факторов, которые в одинаковой степени изменяют параметры чувствительных элементов, а также компенсировать дрейф нуля. Стержни 43, 45, которые укорачиваются, включены в одну пару противоположных плеч моста, а стержни 44, 46, которые удлиняются, включены во вторую пару противоположных плеч моста. При равенстве соответственно сопротивлений стержней 43 45 и 44 46 на усилитель 49 не подается сигнал, что обеспечивает компенсацию дрейфа нуля. Компенсируются также влияния флуктуаций температуры, влажности и запыленности воздуха. По сравнению с мостовой схемой с одним чувствительным элементом в одном плече моста показанная на фиг.9 схема обеспечивает четырехкратное увеличение чувствительности, а по сравнению со схемой с двумя чувствительными элементами двухкратное повышение чувствительности. Еще одним преимуществом схемы на фиг.9 является линейность зависимости сигнала на вход усилителя 49 от изменений сопротивлений чувствительных элементов (стержней 43, 44, 45 и 46). Если в качестве источника питания используется стабилизатор напряжений, то измеряемым на выходе мостовой схемы сигналом является ток, а при использовании в качестве источника 48 питания стабилизатора тока в качестве сигнала в усилитель 49 формируется изменяемое напряжение.
Показанное на фиг.10 устройство для измерения крутящего момента на валу 21 работает следующим образом. В этом устройстве в качестве торсионного упругого элемента, преобразующего момет на валу в угол закручивания, используется участок вала 21 между неподвижными жестко насаженными на вал 21 кольцами 50. При закручивании колец 50 друг относительно друга соответствующим образом изменяются расстояния между кронштейнами 52 и 51: либо укорачивается нить 3 и одновременно удлиняется нить 4, либо наоборот укорачивается нить 4 и удлиняется нить 3. Блок 54 обработки информации в устройстве выполнен как и в устройстве на фиг.8 в виде двух омметров 7 и измерителя 36 отношений. Поэтому сигнал на выходе измерителя отношений численно равен отношению сопротивлений нитей 3 и 4, причем величина абсолютного значения отношений сопротивлений является однозначной мерой момента на валу 21, а знак отношения сопротивлений показывает направление момента кручения вала. Благодаря использованию измерителя отношений в блоке обработки информации обеспечивается дополнительное повышение чувствительности к моменту и уменьшение погрешности измерения момета. Кроме того измерение отношения сопротивлений в качестве меры момента вращения позволяет компенсировать влияние флуктуаций тех возмущающих факторов, которые вызывают одинаковые по знаку изменения сопротивлений нитей 3 и 4.
Устройство для измерения момента вращения вала в случае необходимости передачи информации о моменте на расстояние от контролируемого вала имеет показанный на фиг.11 блок обработки информации. Отличительными особенностями этого блока обработки информации являются: включение нитей 3 и 4 в частотно-зависимую цепь 59 генератора 55, с одной стороны, включение генератора 55 в цепь частотной модуляции радиопередатчика 56, а также включение на выходе радиоприемника 57 демодулятора 58. Работа показанного на фиг.11 устройства заключается в преобразовании цепью 59 с нитями 3 и 4 и генератором 55 изменения сопротивлений нитей 3 и 4 в частоту на выходе генератора 55. Эта низкая частота с генератора 55 поступает в радиопередатчик, где происходит модуляция высокой несущей частоты радиопередатчика 56 с помощью низкой частоты генератора 55. Модулированный сигнал с выхода радиопередатчика через передающую антенну 61 передается к месту приема и обработки информации о моменте на валу 21. Частотно-модулированный сигнал принимается антенной 60 и радиоприемником 57. Демодулятор 58 выделяет низкую модулирующую частоту из принятого радиоприемником сигнала. Эта частота, являющаяся мерой момента на валу, поступает в блок 8 индикации и регистрации, который выполнен, например, в виде частотомера. Индицируемая и регистрируемая частота блоком 8 и является численно равной измеряемому моменту.
Таким образом в любом из приведенных выполнений преобразователя всегда он осуществляет преобразование параметра вращения объекта в деформацию растяжения-сжатия чувствительных элементов из электропроводящего эластичного упругого материала. Аналогично в любом из приведенных блоков обработки информации он осуществляет преобразование получаемых на выходах измерительных преобразователей из эластичного упругого электропроводящего материала сигналов о величине их сопротивления за счет пропускания через них электрического тока в удобную для индикации и регистрации форму о параметре вращения горного объекта. Поэтому при всех исполнениях тех или иных блоков всегда реализуется один метод измерений параметров вращения горных объектов.
В методе и устройстве измерения параметров вращения горных объектов, всегда достигается как минимум n-кратное увеличение чувствительности к измеряемому параметру вращения и за счет этого обеспечивается как минимум n-кратное повышение точности при одновременном упрощении за счет исключения упругих элементов для преобразования параметра вращения в деформацию чувствительных элементов, за счет обеспечения съема информации с чувствительных элементов без дополнительных механизмов и токосъемников, за счет обеспечения демпфирования возникающих при измерениях колебаний самими чувствительными элементами, а также обеспечивается расширение функциональных возможностей за счет стойкости чувствительных элементов к агрессивным, влажным и запыленным средам. Повышение точности при одновременном упрощении и расширении возможностей свидетельствует о преодолении в способе и устройстве технического противоречия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НЕПРЕРЫВНОГО ОПРЕДЕЛЕНИЯ ВЯЗКОСТИ И ПЛОТНОСТИ ЖИДКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2069848C1 |
| СПОСОБ НЕПРЕРЫВНОГО ОПРЕДЕЛЕНИЯ ВЯЗКОСТИ И ПЛОТНОСТИ ЖИДКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2051374C1 |
| СПОСОБ КОНТРОЛЯ ВЫСОТЫ УПЛОТНЕННОЙ ПОСТЕЛИ В ОТСАДОЧНОЙ МАШИНЕ | 1992 |
|
RU2026743C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЯЗКОСТИ ЖИДКОСТИ | 1992 |
|
RU2051372C1 |
| СИЛЬФОННЫЙ ДИФМАНОМЕТР | 1992 |
|
RU2006012C1 |
| ПОПЛАВКОВЫЙ ПЛОТНОМЕР | 1992 |
|
RU2031395C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЯЗКОСТИ ЖИДКОСТИ | 1992 |
|
RU2051371C1 |
| РОТАЦИОННЫЙ ВИСКОЗИМЕТР | 1992 |
|
RU2051373C1 |
| ДАТЧИК УГЛА НАКЛОНА ГОРНОЙ МАШИНЫ | 1992 |
|
RU2018635C1 |
| ПЛОТНОМЕР | 1992 |
|
RU2031394C1 |

Способ измерения параметров вращения горных объектов и устройство для его осуществления относится к горной автоматике, конкретно к способам и средствам измерения параметров вращения горных объектов, и может быть использовано при измерениях моментов и скоростей вращения турбобуров, буровых ставов, приводов и редукторов горных машин для дистанционного и автоматического управления горными машинами. Сущность изобретения заключается в том, что параметры вращения (скорость вращения, момент вращения и т. д.) преобразуются через деформацию растяжения - сжатия чувствительных элементов. 2 с. и 14 з.п. ф-лы, 11 ил.
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Заявка ФРГ N 4004590, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
