Изобретение относится к испытательной технике, а именно к захватам машин для испытания образцов на растяжение-сжатие.
Известен захват, содержащий корпус, размещенные в нем зажимные губки и силовозбудители, жестко связанные с губками и предназначенные для зажима образца. Недостатками этого захвата является прямое взаимодействие силовозбудителей с захватными губками, что требует больших усилий силовозбудителей, чтобы достаточно сильно зажать образец в губках, а при мощных силовозбудителях увеличиваются их габариты и вес, энергоснабжение, что делает их неудобными и ненадежными в эксплуатации, как и захват в целом.
Известен захват, содержащий корпус, размещенные в нем зажимные клиновые губки и прижимной винт. Недостатками этого захвата являются однократное использование клинового эффекта, а следовательно, для зажатия образца в губках требуется создать большую силу прижимным винтом, что не всегда возможно из-за прочности резьбы прижимного винта и требует увеличения габаритов, а значит и веса всего захвата, что делает весь захват громоздким, неудобным и ненадежным в обращении. Кроме этого, использование в качестве силовозбудителя прижимного винта не позволяет автоматизировать работу захвата.
Наиболее близким техническим решением является захват, содержащий корпус, размещенные в нем зажимные клиновые губки и силовозбудитель, связанный с губками. Недостатком захвата - прототипа является необходимость использовать силовозбудители большой мощности, имеющие большие габариты и вес, большое энергоснабжение при эксплуатации. Помимо этого, захват не позволяет менять силу прижатия губок при неизменных параметрах силовозбудителя. Цель - повышение надежности захвата образца путем увеличения усилия зажима образца без увеличения мощности силовозбудителя.
Указанная цель достигается тем, что в конструкции захвата, состоящей из коробчатого корпуса с отверстием в одной из стенок, которым завершается сужающийся в сторону стенки с отверстием канал, образованный внутренними поверхностями стенок, смежных со стенкой с отверстием, клиновых губок, расположенных в канале и выходящих в отверстие, предложено расположить в канале цепочку клиньев с возможностью взаимного относительного перемещения с одним крайним клином под основанием губок, а другим крайним клином по линии действия штока силовозбудителя. Клинья выполнены в виде четырехгранных прямых призм, у которых две смежные грани взаимно перпендикулярны, а величина смежного угла при одной из этих граней находится в пределах 90о< ϕ<135о. Нечетные, по порядку расположения от губок, клинья каждый одной из взаимно перпендикулярных граней опирается на стенку, противоположную стенке с отверстием, четные по порядку расположения клинья одной из взаимно перпендикулярных граней опираются на боковую поверхность выступа у стенки с отверстием, другой гранью из пары взаимно перпендикулярных граней обращены к стенке с отверстием. Количество клиньев и клиновой угол каждого клина определяются соотношением
(ctgϕ)n=  , где ϕ- клиновой угол клина,
, где ϕ- клиновой угол клина,
n - количество клиньев;
F - требуемое усилие зажима образца;
Р - усилие, развиваемое силовозбудителем,
α- клиновый угол губки.
Патентно-информационный поиск показал, что нет одинакового с предложенным техническим решением известного захвата (по совокупности признаков с их совокупными свойствами). Таким образом, предложенное техническое решение соответствует критерию "новизна". Предлагаемое техническое решение соответствует также критерию "существенные отличия".
Признак снабжения захвата расположенной в корпусе цепочкой четырехгранных прямых призм сообщает предложенному техническому решению новые свойства, а именно, позволяет многократно преобразовывать силу от силовозбудителя, передавая ее на зажимные губки захвата, добиваясь этим нужного модуля этой силы и ее направления по отношению к оси силовозбудителя. Варьируя расположение клиньев в канале можно стыковать призмы наклонными гранями так, чтобы основания призм оставались параллельными, при этом ось силовозбудителя будет параллельна всем основаниям призм. Если же, исходя из удобства эксплуатации захвата, силовозбудитель надо расположить так, чтобы его ось иначе была ориентирована в пространстве по отношению к элементам захвата, то призмы располагаются в общем случае в пространственную цепочку, а не в плоскую, как в предыдущем случае.
Расположение граней каждой из призм и расположение этих призм в цепочке позволяет изменять не только направление силы от силовозбудителя, но и изменять величину этого усилия, как увеличивая ее, так и уменьшая, получая сверхсуммарный эффект. Так при слабом силовозбудителе это позволяет многократно увеличить его усилие до требуемой величины прилагаемого усилия к губкам. В случае использования силовозбудителя с неизменными параметрами можно, варьируя расположение и количество, получать разные, даже по порядку, усилия прижатия губок, что позволяет пользоваться захватом при испытании как крупных образцов с усилием растяжения-сжатия около 300 тонн, так и малых образцов, которые требуют гораздо меньшего усилия зажатия в губках, чтобы избежать пластического деформирования захватных участков этих образцов.
Исполнение призм прямыми 4-х гранными технологически удобно. Однако, при повышенном требовании к компактности и удобству захвата призмы могут быть и не прямыми, а в более общем случае - превращаться в многогранники.
Признак исполнения четырехгранных прямых призм и их взаимного расположения сообщает захвату свойства, новые по сравнению с аналогами, а именно позволяет многократно увеличивать усилие, передаваемое от силовозбудителя на губки захвата. Кроме этого, он позволяет выполнять призмы одинаковой геометрии, что делает цепочку простой для изготовления, сбора, эксплуатации, когда требуется наращивание цепочки путем увеличения числа призм в нее входящих. Причем при наращивании цепочки призм положение оси силовозбудителя можно не менять. Все это повышает удобство и надежность захвата.
Сверхсуммарное увеличение усилия, передаваемого от силовозбудителя, достигается благодаря именно геометрии призм и их расположения. При изменении угла ϕ, например, на ϕ=90о пропадает клиновый эффект, а при ϕ<90о и ϕ>135о клиновой эффект оказывается таким, что он вызывает не увеличение, а уменьшение усилия силовозбудителя, а при ϕ=135о клиновой эффект таков, что усилие силовозбудителя не преобразуется по величине.
Все перечисленные признаки с их свойствами в других технических решениях не встречались. А в совокупности в предложенном решении именно они и позволяют достичь положительного эффекта, указанного в цели изобретения.
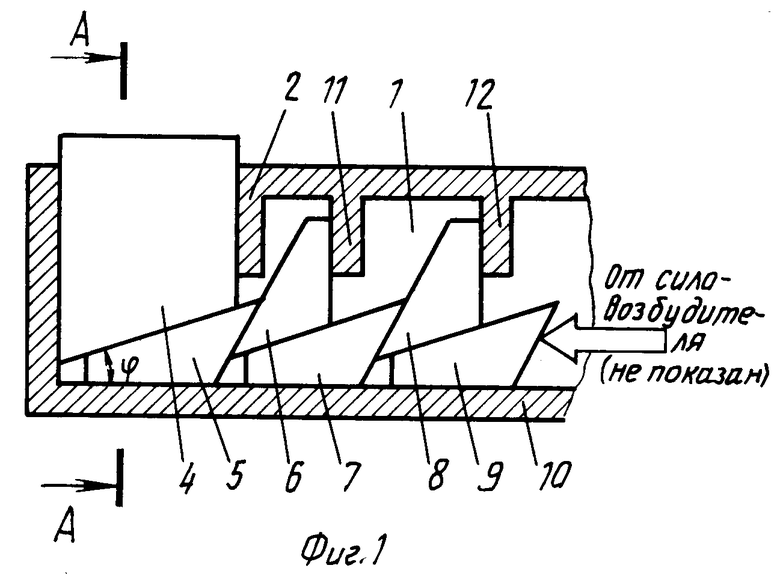
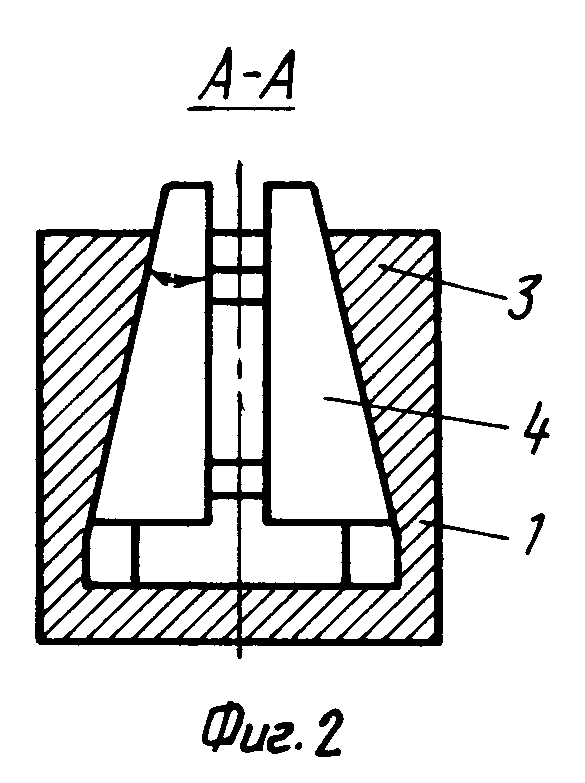
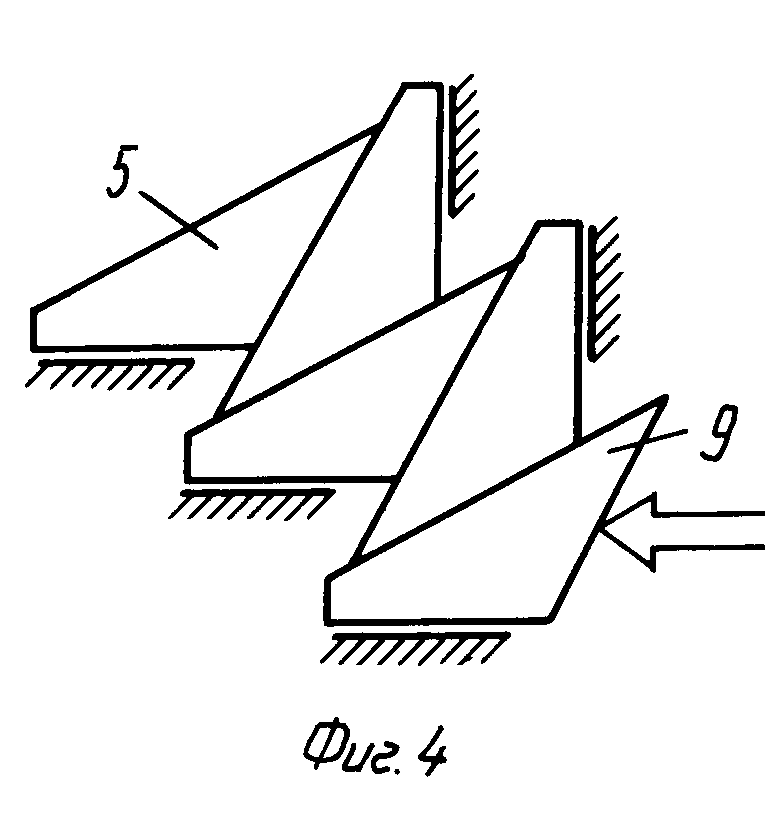
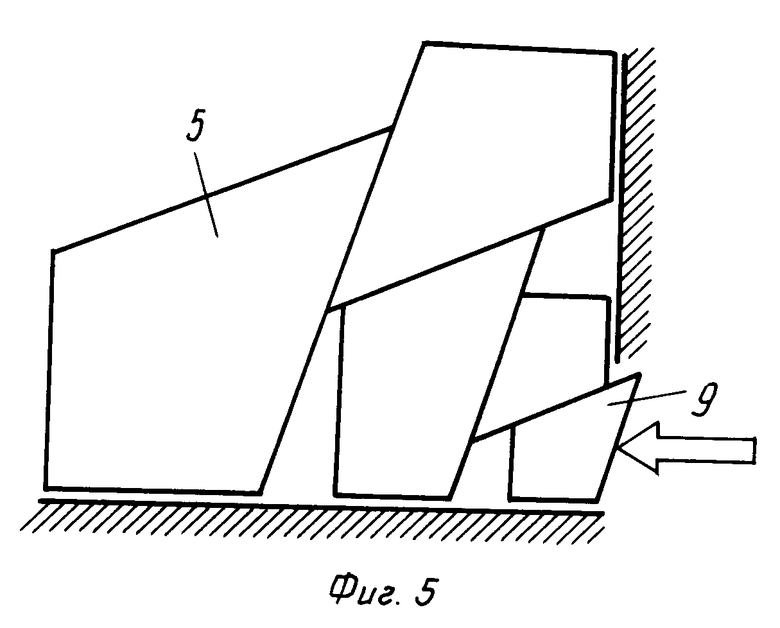
На фиг.1-3 представлена схема захвата; на фиг.4,5 - варианты клиньевой цепочки.
Захват (фиг.1) имеет коробчатый корпус 1 с отверстием в одной из стенок 2, которым завершается сужающийся в сторону стенки с отверстием канал, образованный внутренними поверхностями стенок 3, смежных со стенкой с отверстием (фиг. 2,3). В канале с выходом в отверстие расположены губки 4 и цепочка клиньев 5...9 (фиг.1,4,5). Один крайний клин 5 цепочки расположен под основанием губок 4, другой крайний клин 9 цепочки расположен по линии действия штока силовозбудителя (не показан). Клинья 5...9 выполнены в виде четырехгранных прямых призм, у которых две смежные грани взаимно перпендикулярны, а величина смежного угла при одной из этих граней находится в пределах 90о< ϕ<135о.
Нечетные, по порядку от губок 4, клинья 5,7,9 каждый одной из взаимно перпендикулярных граней опирается на стенку 10, противоположную стенке 2. Последний в этом ряду клин 5 гранью, противоположной грани, которая опирается на стенку, служит основанием под губками 4. Четные по порядку расположения клинья 6,8 одной из взаимно перпендикулярных граней опираются на боковую поверхность выступов 11, 12 соответственно у стенки 2, другой гранью из пары взаимно перпендикулярных граней обращены к стенке 2.
Количество клиньев и клиновый угол каждого клина (угол между гранью, противоположной тупому углу, и гранью, противоположной этой грани, определяются соотно- шением
(ctgϕ)n=  , где ϕ- клиновый угол клина,
, где ϕ- клиновый угол клина,
n - количество клиньев,
F - требуемое усилие зажима образца,
Р - усилие, развиваемое силовозбудителем,
α- клиновый угол губки.
Захват работает следующим образом.
Между губками 4 захвата устанавливают образец (не показан). Силовозбудителем создают усилие, которым обеспечивают перемещение связанной с ним призме 9 в направлении действия усилия. Призма 9 перемещается по направлению оси силовозбудителя, опираясь на стенку корпуса 1. Контактирующая с ней призма 8 тоже приходит в движение, скользя вдоль внутренней грани корпуса 1 в направлении, перпендикулярном оси силовозбудителя. Аналогично двигаются все другие призмы 4...7 в цепочке. Крайняя призма 5 в цепочке, перемещаясь, давит своей гранью на основания губок 4. Губки 4, опираясь на наклонные грани корпуса 1 двигаются в отверстии стенки 2, сближаясь друг с другом и сдавливая образец с усилием F. В итоге перемещения всех призм 5... 9 цепочки умноженное усилие от силовозбудителя передается гранью последней в цепочке призмы 5 на губки 4, сжимающие образец с требуемым усилием F, которое обеспечивается при неизменных параметрах силовозбудителя. После испытаний отключают силовозбудители, освобождая образец от усилия зажатия губками 4.
Предлагаемый захват по сравнению с базовым объектом, в качестве которого выбирается прототип, как наиболее близкий из известных объектов, позволяет повысить надежность захвата.
Предлагаемый захват обеспечивает надежность удержания образца увеличением усилия F сжатия губок без увеличения мощности силовозбудителя путем снабжения захвата цепочкой одинаковых 4-х гранных прямых призм, умножающих усилие, передаваемое от силовозбудителя зажимным губкам захвата.
Экономический эффект может быть получен по сравнению с прототипом при использовании захвата за счет надежности захвата образца, что позволяет избежать срыва процесса испытания. Кроме этого, нет надобности в наборе силовозбудителей различной мощности для обеспечения соответствующего зажатия образца. Такой набор силовозбудителей не нужен, т.к. поставленная цель достигается более экономичным средством - цепочкой призм. Экономический эффект может быть количественно оценен в каждом конкретном случае применения предлагаемого захвата в многотонных (особенно) испытательных машинах для испытания крупных и дорогостоящих образцов и деталей машин.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ПАНЕЛЕЙ НА ПРОЧНОСТЬ | 1994 |
|
RU2079828C1 |
| Устройство для определения прочности сцепления кирпича с раствором | 1980 |
|
SU951118A1 |
| ПРИЕМНИК ВОЗДУШНОГО ДАВЛЕНИЯ | 1997 |
|
RU2121667C1 |
| Устройство для разрушения горных пород | 1982 |
|
SU1059174A1 |
| Способ испытаний образца элементов авиационных конструкций и устройство для приложения нагрузки | 1990 |
|
SU1779965A1 |
| ЗАХВАТ ДЛЯ КРЕПЛЕНИЯ ОБРАЗЦОВ ПРИ ИСПЫТАНИИ НА РАСТЯЖЕНИЕ | 2001 |
|
RU2187793C1 |
| Волноводный уголок | 2018 |
|
RU2680731C1 |
| УСТРОЙСТВО ДЛЯ ФИКСАЦИИ СКАЧКОВ УПЛОТНЕНИЯ В СВЕРХЗВУКОВОМ ПОТОКЕ | 1992 |
|
RU2018461C1 |
| Устройство для испытаний изделий с соединенными трубчатым и плоским элементами на прочность | 1988 |
|
SU1525538A1 |
| СПОСОБ ИЗМЕРЕНИЯ НАПРАВЛЕНИЯ СКОРОСТИ ГАЗОВОГО ПОТОКА | 1991 |
|
RU2008689C1 |
Изобретение относится к испытательной технике, к машинам для испытания образцов на растяжение - сжатие. Цель изобретения - повышение надежности. Захват состоит из коробчатого корпуса с отверстием и пары противоположных направляющих стенок, сужающихся в сторону отверстия, клиновых губок, расположенных в корпусе силовозбудителя, цепочки клиньев, установленных в корпусе с возможностью их перемещения относительно друг друга, клинья выполнены в виде четырех гранных прямых призм, одна грань которой образует угол клина, корпус выполнен с выступами на внутренней поверхности стенки с отверстием, а количество клиньев и угол клина определены из следующих соотношений: 90°<ϕ<45°, (ctgϕ)n=2F/Pctgα, где v - клиновый угол, n - количество клиньев, F - требуемое усилие зажима образца, P - усилие силовозбудителя, a - клиновый угол губки. 5 ил.
ЗАХВАТ ДЛЯ ИСПЫТАТЕЛЬНОЙ МАШИНЫ, состоящий из коробчатого корпуса с отверстием и парой противоположных направляющих стенок, сужающихся в сторону отверстия, клиновых губок, расположенных в корпусе, взаимодействующих с направляющими стенками и проходящих через отверстие, и силовозбудитель, связанный с губками, отличающийся тем, что, с целью повышения надежности, он снабжен цепочкой клиньев, установленных в корпусе с возможностью их перемещения относительно друг друга, один из крайних клиньев предназначен для взаимодействия с основанием губок, другой крайний клин предназначен для взаимодействия с силовозбудителем, клинья выполнены в виде четырехгранных прямых призм, у которых взаимно перепендикулярны две смежные грани, одна из которых образует угол клина, корпус выполнен с выступами на внутренней поверхности стенки с отверстием, каждый из нечетных клиньев по порядку расположения от губок своей гранью, образующей угол клина, предназначен для взаимодействия со стенкой корпуса, четные клинья гранью, образующей угол клина, предназначен для взаимодействия с боковой поверхностью выступа, а количество клиньев и угол клина определены из следующих соотношений:
90o < ϕ < 45o ;
(ctgϕ)n=  ,
,
где ϕ - клиновый угол;
n - количество клиньев;
F - требуемое усилие зажима образца;
P - усилие силовозбудителя;
α - клиновый угол губки.
| Клиновой захват | 1978 |
|
SU842465A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
