Изобретение относится к измерительной технике и может быть использовано в системе управления космического аппарата для определения его угловых отклонений от направления на центр Земли.
Известен датчик горизонта, содержащий оптическую систему и приемник излучения. Работа датчика основана на проецировании широкоугольной линзой изображения Земли на приемник излучения, содержащий четыре болометра. Недостатками такого устройства являются низкая точность и невозможность непосредственного сопряжения с ЦВМ.
Известен датчик горизонта, содержащий оптическую систему и приемники излучения. Работа датчика основана на проецировании оптической системой изображения Земли на группу приемников излучения. Недостатками такого устройства являются низкая точность и невозможность непосредственного сопряжения с ЦВМ.
Наиболее близким по технической сущности к заявляемому изобретению является датчик горизонта фирмы "BARNES ENGINEERING COMPANY", содержащий оптическую систему и матричный приемник. Работа устройства основана на проецировании изображения Земли посредством кремниевой линзы на мозаику термоэлементов. Недостатком такого устройства является низкая точность, обусловленная наличием подвижных элементов следящих систем по измеряемым осям.
Целью изобретения является повышение точности за счет исключения подвижных элементов следящих систем по измеряемым осям (измерители углов и моментные двигатели, установленные по осям подвеса и связанные через соответствующие усилители).
Цель достигается тем, что оптическая система выполнена в виде широкоугольного объектива, содержащего входную и выходную плоско-выпуклые линзы с размещенной между ними прозрачной диафрагмой, а на внешней поверхности выходной линзы закреплен матричный приемник излучения, например матрица приборов с зарядовой связью.
Выполнение оптической системы в виде широкоугольного объектива (в технической литературе объектив данного типа известен как "рыбий глаз") и закрепление на внешней поверхности выходной линзы матричного приемника излучения расширяет угловой диапазон работы прибора, что дает возможность определять величину и направление отклонения оси визирования прибора от направления на центр Земли по величине и направлению смещения изображения на матричном приемнике излучения, что позволяет исключить подвижные элементы следящих систем по измерительным осям, а, следовательно, и ликвидировать ошибки (обусловленные трением и люфтом в звеньях карданного подвеса, неточным съемом информации с датчиков углов и т.д.), вносимые этими элементами в работу прибора. Кроме того отсутствие подвижных элементов увеличивает надежность и ресурс работы прибора.
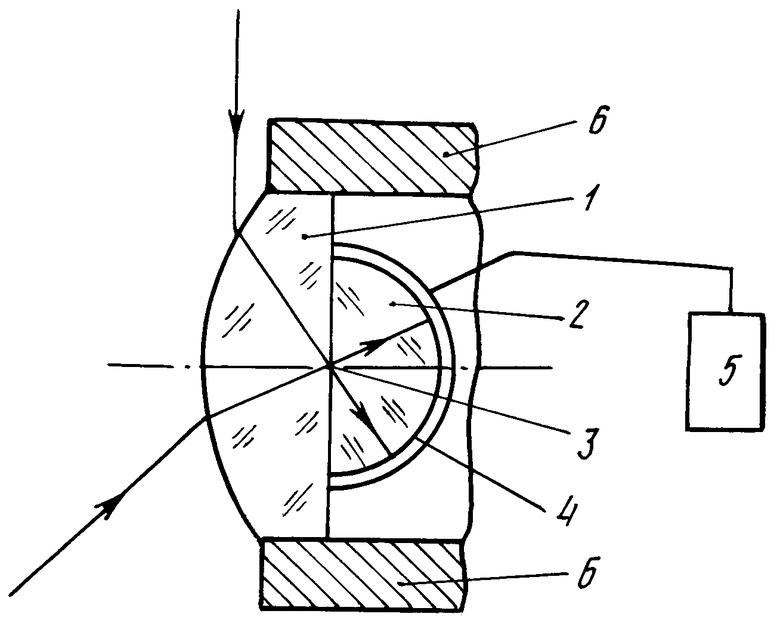
На чертеже приведена схема предлагаемого датчика.
Датчик горизонта содержит оптически сопряженные входную плоско-выпуклую линзу 1 и выходную плоско-выпуклую линзу 2. Между ними расположена диафрагма 3. На внешней поверхности выходной линзы закреплен матричный приемник 4 излучения, выход которого соединен с входом вычислителя 5 угловых отклонений, устройство расположено в кожухе 6.
Датчик горизонта работает следующим образом.
Оптическое излучение Земли собирается входной плоско-выпуклой линзой 1, проходит через диафрагму 3 и проецируется на поверхность матричного приемника 4 излучения выходной плоско-выпуклой линзой 2. Отклонение оси визирования прибора от направления местной вертикали вызывает смещение изображения на поверхности приемника излучения. Информация о положении изображения вводится в цифровую вычислительную машину - вычислитель угловых отклонений и определяется направление и угол отклонения оси визирования.
Так как отклонение оси визирования от направления местной вертикали вызывает смещение геометрического центра изображения на поверхности МПЗС, то алгоритм определения углов отклонения по тангажу и крену может быть представлен следующими выражениями:
ν= К(хо-х), ϕ =К(Yo-Y), где ν , ϕ - углы отклонения соответственно по тангажу и крену;
К - коэффициент пропорциональности;
Хо, Yo - координаты центра МПЗС;
Х, Y - координаты геометрического центра изображения.
Величины Х и и Y вычисляются в соответствии с формулами:
X =  , Y =
, Y =  , где i,j - соответственно число столбцов и строк МПЗС;
, где i,j - соответственно число столбцов и строк МПЗС;
f(xi, yj) - функция яркости для бинарного изображения;
xij, yij - дискретные значения координат центров фоточувствительных элементов.
В предлагаемой конструкции используются две полусферические иммерсионные линзы. Сущность действия такой линзы заключается в том, что чувствительный слой приемника и поверхность линзы совмещены друг с другом без воздушного зазора и лучи из иммерсионной линзы, минуя воздушный промежуток, попадают непосредственно на приемник излучения. Известны подобные конструкции на одной иммерсионной линзе применительно к одноэлементному приемнику излучения. Для использования МПЗС в предлагаемой конструкции дополнительно включена вторая иммерсионная линза, на сферической поверхности которой закреплена МПЗС.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ГОРИЗОНТА | 1991 |
|
RU2014564C1 |
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ СОЛНЦА | 2006 |
|
RU2308005C1 |
| Устройство коллинеарного переноса лучей | 2024 |
|
RU2824311C1 |
| КОЛЛИМАТОРНАЯ ИНДИКАТОРНАЯ СИСТЕМА | 2008 |
|
RU2364902C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ИНФРАКРАСНОГО ИЗОБРАЖЕНИЯ | 2014 |
|
RU2567126C1 |
| Углоизмерительный прибор | 2018 |
|
RU2682842C1 |
| ЭЛЕКТРОННЫЙ НИВЕЛИР | 2024 |
|
RU2834921C1 |
| Светосильный широкоугольный объектив | 2020 |
|
RU2754719C1 |
| СВЕТОСИЛЬНЫЙ ШИРОКОУГОЛЬНЫЙ ОБЪЕКТИВ ДЛЯ ИНФРАКРАСНОЙ ОБЛАСТИ СПЕКТРА (ВАРИАНТЫ) | 2008 |
|
RU2385475C1 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2011 |
|
RU2470258C1 |
Изобретение относится к измерительной технике и может быть использовано в системе управления космического аппарата для определения его угловых отклонений от направления на центр Земли. Датчик горизонта содержит оптически сопряженные входную и выходную плоско-выпуклые линзы с расположенной между ними полевой диафрагмой, а также матричный приемник излучения, закрепленный на внешней поверхности выходной линзы, который соединен с вычислителем угловых отклонений. Оптическое излучение Земли собирается входной плосковыпуклой линзой, проходит через диафрагму и проецируется на поверхность матричного приемника излучения выходной плосковыпуклой линзой. Отклонение оси визирования прибора от направления местной вертикали вызывает смешением изображения на поверхности приемника излучения. По информации о величине смещения изображения в вычислителе угловых отклонений находятся направление и величина угла отклонения оси визирования. Повышение точности определения угловых отклонений оси визирования достигается за счет исключения подвижных элементов следящих систем, а , следовательно, и ошибок, вносимых этими системами, путем выполнения оптической системы в виде широкоугольного объектива с закрепленным на внешней поверхности выходной линзы матричным приемником излучения. 1 ил.
ДАТЧИК ГОРИЗОНТА, содержащий оптически сопряженные оптическую систему и матричный приемник излучения, выход которого соединен с входом вычислителя угловых отклонений, отличающийся тем, что, с целью повышения точности, оптическая система выполнена в виде широкоугольного объектива типа "рыбий глаз", содержащего входную и выходную плосковыпуклые линзы с расположенной между ними полевой диафрагмой, а матричный приемник излучения закреплен на внешней поверхности выходной линзы.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сафронов Ю.П., Андрианов Ю.Г | |||
| Инфракрасная техника и космос | |||
| М.: Советское радио, 1978, с.30. | |||
