Изобретение относится к механическим передачам с бесступенчатым изменением частоты вращения ведомого вала и может быть использовано в автомобилестроении.
Известен механизм регулирования, позволяющий регулировать передаточное отношение без остановки вариатора. Механизм содержит два планетарных ряда с общим эпициклом, солнечные шестерни которых соединены одна с ведущим валом, другая - с механизмом регулировки. Водило одного ряда остановлено, а при вращении водила второго ряда солнечные шестерни начинают вращаться друг относительно друга, в результате чего изменяется передаточное отношение.
Указанный механизм позволяет регулировать передаточное отношение на ходу (без остановки вариатора), однако имеет сложное конструктивное устройство, большое количество деталей и большие габариты по диаметру.
Цель изобретения - упрощение конструкции за счет сокращения количества деталей и уменьшения габаритов.
Указанная цель достигается тем, что в планетарном механизме регулирования, включающем два одинаковых планетарных ряда с общим эпициклом, солнечные шестерни которых соединены одна с ведущим валом, другая с механизмом регулирования, водило одного ряда, соединенное с корпусом, водило второго ряда, соединенное с автономным регулятором, каждый планетарный ряд содержит один сателлит с двумя зубчатыми венцами. Оси вращения водила и сателлита расположены со смещением и находятся друг от друга на расстоянии, меньшем радиуса меньшего из зубчатых венцов сателлита. При этом 
 ≠ 1 где Z12,Z13 - числа зубьев сателлитов;
≠ 1 где Z12,Z13 - числа зубьев сателлитов;
Z4 - число зубьев эпицикла;
Z2 - число зубьев солнца.
Сателлит содержит два зубчатых венца внешнего или внутреннего зацепления с разными числами зубьев.
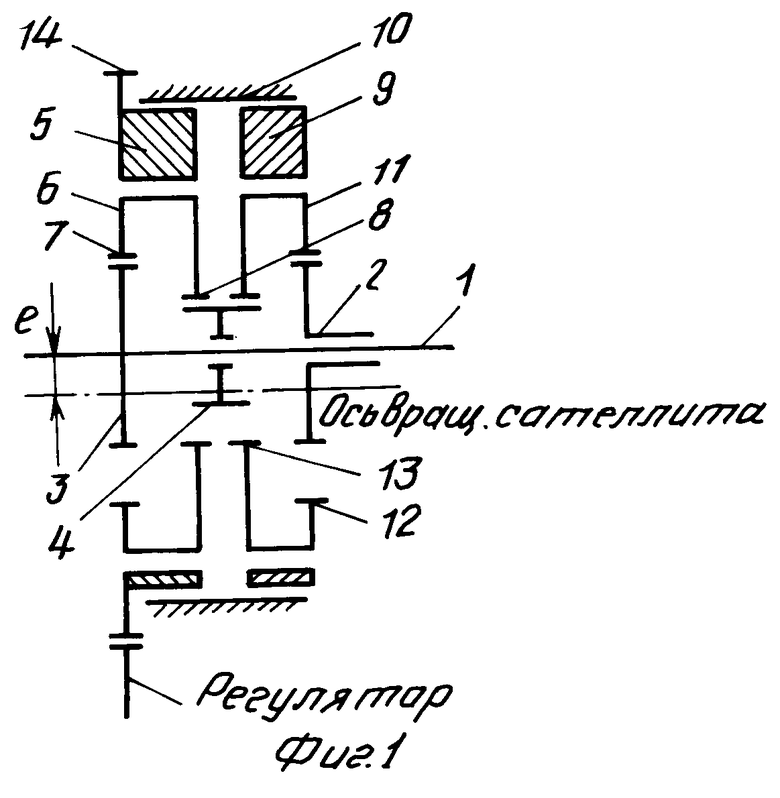
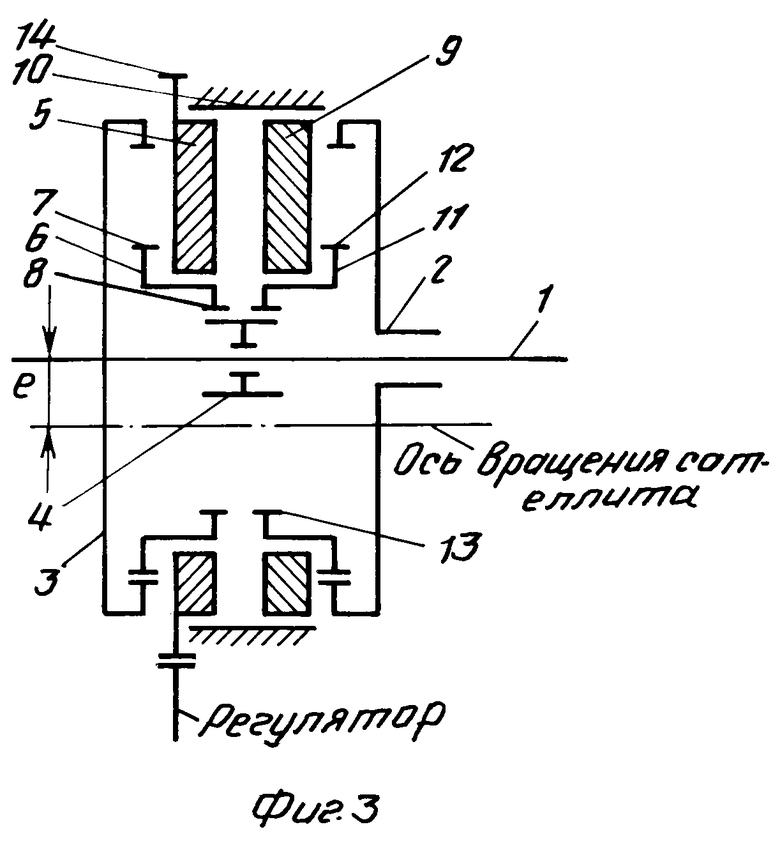
На фиг. 1- планетарный механизм регулирования с сателлитами, имеющими зубчатые венцы внутреннего зацепления, общий вид; на фиг.2 - то же, с сателлитами, имеющими зубчатые венцы внешнего зацепления; на фиг.3 - то же, с сателлитами, имеющими венцы внешнего и внутреннего зацепления.
Планетарный механизм регулирования, выполненный с возможностью взаимного поворота вала 1 и шестерни 2, состоит из двух планетарных рядов. Первый планетарный ряд содержит солнечную шестерню 3, жестко соединенную с валом 1, эпицикл 4, водило 5, сателлит 6, содержащий два зубчатых венца 7 и 8. Оси вращения сателлит и водила 5 находятся на расстоянии е. Второй планетарный ряд содержит солнечную шестерню 2, эпицикл 4, водило 9, остановленное относительно корпуса 10, сателлит 11, содержащий два зубчатых венца 12 и 13. Оси вращения сателлита 11 и водила 9 находятся на расстоянии е. Водило первого планетарного ряда 5 имеет шестерню 14, соединенную с автономным регулятором. Солнечная шестерня 2 соединена с механизмом регулировки. Эпициклы обоих рядов выполнены в виде шестерни 4, свободно посаженной на вал 1. Оба планетарных ряда одинаковы, поэтому оси вращения сателлитов 6 и 11 отстоят на одинаковом расстоянии от оси вращения водил 5 и 9 и
Z7 = Z12; Z8 = Z13; Z2 = Z3.
Регулирование происходит за счет вращения водила 5, передаваемого к нему через шестерню от автономного регулятора.
Уравнения Виллиса для двух планетарных рядов и уравнения связи имеют вид:
ω11 = K1 ω21+ (1 - K1) ω31
ω12= K2 ω22 + (1 - K2) ω32
ω32 = 0
ω21 = ω22 где ω11 = ω3 - угловая скорость вращения солнечной шестерни 3 первого планетарного ряда;
ω21 = ω27 = ω4 - угловая скорость вращения эпицикла 4, общего для обоих планетарных рядов;
ω31 = ω5 - угловая скорость вращения водила 5;
К1 = К2 = К - параметры планетарных рядов;
ω12 = ω2 - угловая скорость вращения солнечной шестерни 2;
ω32 = ω9 - угловая скорость вращения водила 9
ω3 = ω11 = K ω21 + (1 - K ) ω31
ω2 = ω12 = К ω21
Разность угловых скоростей солнечных шестерен 2 и 3
ω3 - ω2 = (1 - K) ω31 = (1 - K ) ω5
Механизм (фиг.1) не работоспособен, если К = 1. Если учесть, что Z12 - Z2 = Z13 - Z4 = Z8- Z4 = Z7 - Z3 = ΔZ, то
K =  =
= 
K =  ·
· 
при К = 1
Z7(Z8 - ΔZ) = Z8(Z7 - ΔZ)
ΔZ(Z8 - Z7) = 0
Это возможно, если оси вращения сателлита и водила совпадают (ΔZ = 0) или зубчатые венцы сателлита с внутренним зацеплением одинаковы.
Механизм (фиг.2) не работоспособен, если К = 1
K =  =
= 
Если учесть, что
Z2 - Z12 = Z4 - Z13 = Z4 - Z8 =
= Z3 - Z7 =Δ Z, то
К = 1 при ΔZ(Z8 - Z7) = 0.
Это возможно, если оси вращения сателлита и водила совпадают (ΔZ = 0) или зубчатые венцы сателлита с внешним зацеплением одинаковы.
Механизм (фиг.3) не работоспособен, если К = 1
K =  =
= 
Если учесть, что
Z2 - Z12 = Z13 - Z4 = Z8 - Z4 =
= Z3 - Z7 = ΔZ, то К = 1 при ΔZ(Z8 + Z7) = 0
Это возможно, если оси вращения сателлита и водила совпадают ( ΔZ = 0).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАМКНУТАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 1992 |
|
RU2038518C1 |
| Бесступенчатая коробка передач | 2023 |
|
RU2806843C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 1999 |
|
RU2160401C1 |
| ШИРОКОДИАПАЗОННАЯ РЕВЕРСИВНАЯ ТРАНСМИССИЯ | 2020 |
|
RU2729847C1 |
| ПЛАНЕТАРНАЯ СОСТАВНАЯ КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2380596C1 |
| МЕХАНИЧЕСКАЯ АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 1993 |
|
RU2083385C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| Многоступенчатая полностью автоматическая коробка передач портового оборудования | 2022 |
|
RU2819461C2 |
| УСТРОЙСТВО ДЛЯ ПЛАСТИЧЕСКОГО ОБЪЕМНОГО ДЕФОРМИРОВАНИЯ ТРУБ | 2017 |
|
RU2659551C1 |
| ПЛАНЕТАРНЫЙ ФРИКЦИОННЫЙ ВАРИАТОР | 2005 |
|
RU2300677C1 |

Сущность изобретения: планетарный механизм регулирования вариатора содержит два одинаковых планетарных ряда с общим эпициклом, солнечные шестерни которых соединены одна с ведущим валом, другая - с механизмом регулировки. Водило одного ряда соединено с корпусом, водило второго ряда - с автономным регулятором. Каждый планетарный ряд содержит один сателлит с двумя зубчатыми венцами. Оси вращения водила и сателлита расположены со смещением и находятся друг от друга на расстоянии меньше радиуса меньшего из зубчатых венцов сателлита. 1 з.п. ф-лы, 3 ил.

 ≠ 1,
≠ 1,
где Z12 и Z13 - числа зубьев зубчатых венцов сателлита;
Z4 - число зубьев эпицикла;
Z2 - число зубьев солнечной шестерни.
| Благонравов А.А | |||
| Механические бесступенчатые передачи нефрикционного типа | |||
| М.: Машиностроение, 1977, с.113, рис.60. |
