Изобретение относится к средствам контроля, используемым в прецизионном станкостроении и оптической промышленности.
Известны зенковки конические (СТ СЭВ 698-77, СТ СЭВ 699-77), представляющие из себя стержень с выполненными на торце режущими лезвиями, пересекающимися на оси симметрии стержня. Зенковка устанавливается в патрон, который укреплен в задней бабке токарного станка, двигая которую до касания инструмента с вращающейся деталью, укрепленной в патроне станка, обеспечивают зацентровку вращающейся детали.
Недостатком известного устройства является контактность и низкая точность отыскания центра вращения, обусловленная зазорами и несоосностью центрирующего инструмента, патрона и задней бабки станка.
Известно устройство для центрирования геодезического прибора, состоящее из съемного элемента посадочного узла, центрировочной платформы с тремя подъемными винтами, к которой жестко прикреплен съемочный элемент посадочного узла, форма нижнего торца которого соответствует форме головки геодезического знака (а.с. N 1080011 СССР, 1984).
Недостатком известного устройства является невозможность отцентрировки вращающейся детали в вертикальном положении.
Наиболее близким по своей технической сущности к предлагаемому изобретению является лазерное устройство для контроля соосности установки инструмента и обрабатываемой детали, которое устанавливается во вращающемся элементе, несущим инструмент, например в зажимном патроне. Устройство представляет собой цилиндрический корпус, в котором смонтирован лазер, на заднем конце корпуса предусмотрена цилиндрическая установочная шейка меньшего диаметра, на которой монтируется лазер. Корпус с лазером, как и устанавливаемый вместо него инструмент, всегда располагается с некоторым угловым смещением относительно номинальной оси. Поэтому, когда шпиндель с лазером начинают вращаться, лазерный луч очерчивает на торце неподвижной заготовки окружность, в центре которой находится точка - проекция номинальной оси вращения. Для получения видимой окружности на поверхность заготовки наносится фоточувствительный слой, площадь которого определяется первоначальной точностью угловой установки корпуса с лазером во вращающемся крепежном элементе станка [1].
Недостатком известного устройства является невозможность с помощью него определить бесконтактно центр вращающейся детали. Бесконтактное определение местонахождения центра вращения заготовки требуется для подведения к этому месту (к центру) режущей кромки обрабатывающего инструмента.
Цель изобретения - повышение производительности за счет исключения контакта с деталью.
Цель достигается тем, что в известное устройство, содержащее лазерный источник света, фотоприемник и блок обработки фотоинформации, дополнительно введены две сферические линзы, второй лазерный источник света и второй фотоприемник, оптические оси лазерных источников соосны, фотоприемники расположены на одинаковых расстояниях от источников, а сферические линзы расположены на оси одного из источников света и на одинаковом расстоянии от них, управляющие входы источников света и выходы фотоприемников соединены соответственно с управляющими выходами и информационными входами блока обработки фотоинформации, два информационных выхода которого являются выходами устройства.
Блок обработки информации состоит из последовательно соединенных между собой первого усилителя, коммутатора, первого пикового детектора, первого компаратора, триггера, вентиля, первого счетчика, делителя, первого постоянно-запоминающего устройства, первого регистра памяти, второго постоянно-запоминающего устройства, выход которого является первым информационным выходом блока обработки, выход второго усилителя соединен с вторым входом коммутатора, выход которого соединен с вторым первого компаратора, с выходом второго пикового детектора и с первым входом второго компаратора, выход которого соединен с управляющим входом первого пикового детектора, выход первого компаратора соединен также с управляющим входом второго пикового детектора и с входом второго счетчика, выход которого соединен с вторым входом делителя, выход первого постоянно-запоминающего устройства соединен также с входом второго регистра памяти, выход которого соединен с первым входом третьего постоянно-запоминающего устройства, выход которого соединен с вторым входом второго постоянно-запоминающего устройства и является также вторым выходом блока обработки, выход первого регистра памяти соединен с вторым входом третьего постоянно-запоминающего устройства, первый и второй выходы блока управления являются управляющими выходами блока обработки фотоинформации, а два выхода блока обработки являются входами двух усилителей, третий выход блока управления соединен с управляющим входом коммутатора, четвертый выход блока управления соединен с управляющими входами обоих компараторов и входом вентиля, пятый выход блока управления соединен с управляющими входами триггера, первого и второго счетчиков, а шестой и седьмой выходы блока управления соединены с управляющими входами первого и второго регистров памяти соответственно.
Существенным отличием предлагаемого устройства от прототипа является то, что фотоприемник не располагается на вращающейся детали. Кроме того, введение второго лазерного источника и второго фотоприемника требуется для создания второго канала измерения. Два канала измерения нужны для создания второго канала измерения. Два канала измерения нужны для измерения двух радиусов, по которым определяется центр вращения. Две сферические линзы (каждая в своем канале) нужны для фокусировки лазерного излучения на поверхность детали, чтобы обеспечить требуемую точность определения местонахождения центра вращения. Перечисленные существенные отличия предлагаемого изобретения от прототипа приводят к возможности с достаточно высокой точностью бесконтактно определять положение центра вращающейся детали.
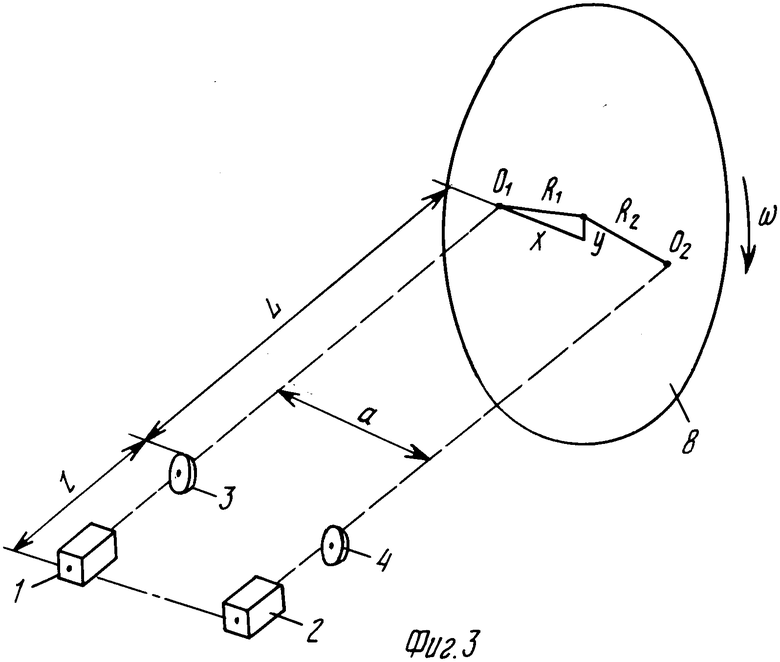
Сущность предлагаемого изобретения состоит в следующем. Измерение ширины корреляционной функции или среднего периода временной модуляции интенсивности рассеянного когерентного излучения позволяет определить расстояние от центра вращения детали до середины освещенной области на поверхности, которую создает сфокусированный линзой лазерный луч. По двум таким расстояниям, измеренным независимо двумя каналами в предлагаемом устройстве, можно рассчитывать координаты центра вращения по формуле


 где R1, R2 - расстояние от центра вращения до центра освещенной области на поверхности детали, которую формирует сфокусированный лазерный пучок, соответственно для первого и второго каналов устройства; а - расстояние между центрами освещенных областей на поверхности. (х, y) - координаты центра вращения детали, отсчитываемые от одного из центров освещенных областей на поверхности.
где R1, R2 - расстояние от центра вращения до центра освещенной области на поверхности детали, которую формирует сфокусированный лазерный пучок, соответственно для первого и второго каналов устройства; а - расстояние между центрами освещенных областей на поверхности. (х, y) - координаты центра вращения детали, отсчитываемые от одного из центров освещенных областей на поверхности.
Недопустимость расположения на вращающейся поверхности заготовки источника или приемника света приводит к необходимости анализа статистических свойств интенсивности рассеянного этой поверхностью когерентного света. Всего за один оборот вращающейся заготовки при малом радиусе пятна фокусировки лазерного пучка можно зарегистрировать сотни периодов временной модуляции интенсивности, по которым с высокой точностью может быть определен средний период временной модуляции интенсивности, с которым однозначно связано расстояние от центра пятна фокусировки пучка до центра вращения поверхности детали.
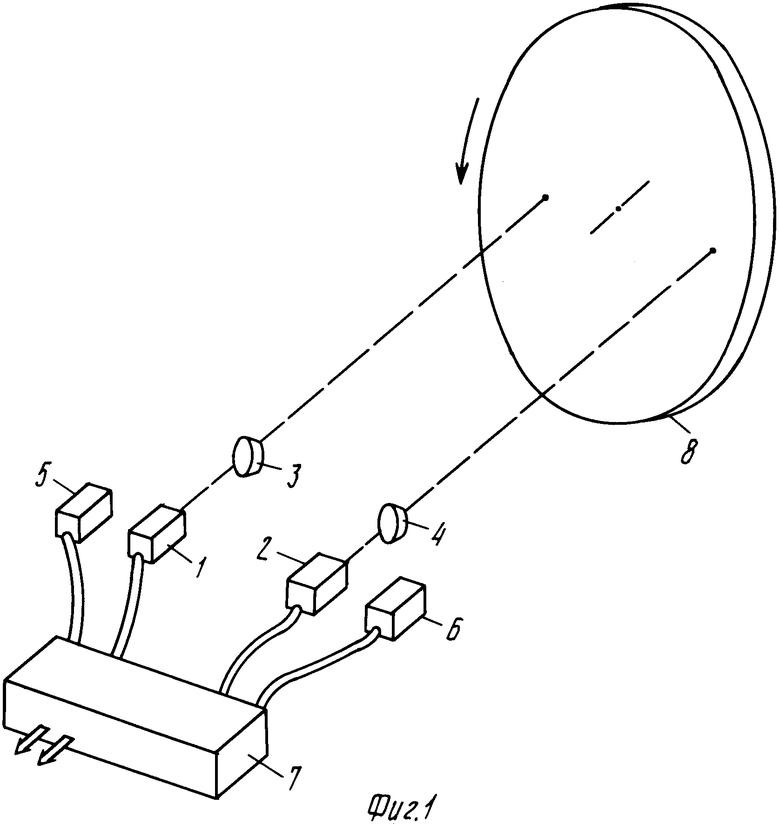
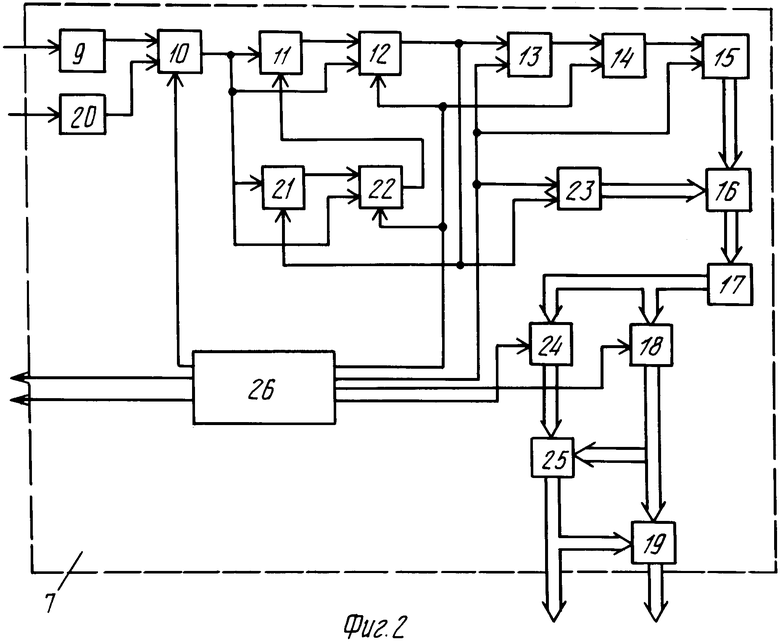
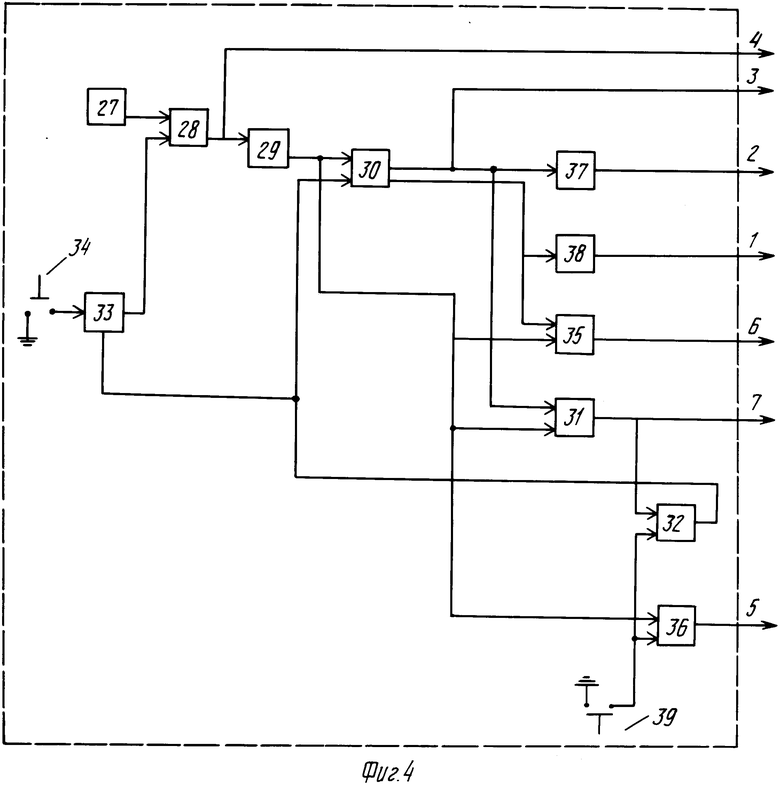
На фиг. 1 показана оптико-электронная схема устройства; на фиг. 2 показана блок-схема блока обработки фотоинформации; на фиг. 3 показана оптическая схема устройства с обозначением параметров, поясняющих работу устройства; на фиг. 4 показан пример блок-схемы блока управления.
Устройство содержит два лазерных источника 1 и 2 света, имеющих соосные оптические оси, на которых расположены на одинаковых расстояниях от источников две одинаковые сферические линзы 3 и 4. На одинаковом расстоянии от каждого из источников 1, 2 расположены два фотоприемника 5 и 6, фоточувствительные площадки которых расположены перпендикулярно оптическим осям источников. Выходы фотоприемников 5, 6 соединены с входами блока 7 обработки фотоинформации, два управляющих выхода которого соединены с управляющими входами лазерных источников 1, 2. Блок 7 обработки фотоинформации имеет два информационных выхода. Ось вращения детали 8 должна быть соосна осям лазерных источников 1, 2.
Блок 7 обработки содержит последовательно соединенные между собой усилитель 9, коммутатор 10, пиковый детектор 11, компаратор 12, триггер 13, вентиль 14, счетчик 15, делитель 16, постоянно-запоминающее устройство 17, регистра 18 памяти и постоянно-запоминающее устройство 19, выход которого является первым информационным выходом блока 7 обработки, выход усилителя 20 соединен с вторым входом коммутатора 10, выход которого соединен также с вторым входом компаратора 12, с входом пикового детектора 21 и с первым входом компаратора 22, выход пикового детектора 21 соединен с вторым входом компаратора 22, выход которого соединен с управляющим входом пикового детектора 11, выход компаратора 12 соединен с управляющим входом пикового детектора 21 и с входом счетчика 23, выход которого соединен с вторым входом делителя 16, выход постоянно-запоминающего устройства 17 соединен также с входом регистра 24 памяти, выход которого соединен с первым входом постоянно-запоминающего устройства 25, выход которого соединен с вторым входом постоянно-запоминающего устройства 19 и является также вторым выходом блока 7 обработки, выход регистра 18 памяти соединен с вторым входом постоянно-запоминающего устройства 25, первый и второй выходы блока 26 управления являются управляющими выходами блока 7 обработки, а два входа блока 7 обработки являются входами двух усилителей 9,20, третий выход блока 26 управления соединен с управляющим входом коммутатора 10, четвертый выход блока 26 управления соединен с управляющими входами компаратора 12, 22 и вентиля 14, пятый выход блока 26 управления соединен с управляющими входами триггера 13 и счетчиков 15, 23, а шестой и седьмой выходы блока 26 управления соединены с управляющими входами регистров 18, 24 памяти соответственно.
Блок 26 управления содержит последовательно соединенные генератор 27 тактовой частоты, вентиль 28, К-разрядный счетчик 29, определяющий длину выборки, триггер 30 переключения каналов, вентиль 31 и схему ИЛИ 32, а также триггер 33 включения, первый вход которого соединен с кнопкой "Пуск" 34, а выход соединен с вторым входом вентиля 28, выход которого является четвертым выходом блока 26 управления, который соединен с управляющими входами компараторов 12, 22 и входом вентиля 14, выход счетчика 29 соединен также с вторым входом вентиля 31 и с вторым входом вентиля 35, а также с первым входом второй схемы ИЛИ 36, первый выход триггера 30 является третьим выходом блока 26 управления, который соединен с коммутатором 10, и соединен также с входом усилителя 37, выход которого является вторым выходом блока 26 управления, который соединен с лазерным источником 2 света, второй выход триггера 30 соединен с входом усилителя 38, выход которого является первым управляющим выходом блока 26 управления и соединен с лазерным источником 1 света, второй выход триггера 30 также соединен с первым входом вентиля 35, выход которого является шестым выходом 26 управления, который соединен с управляющим входом регистра 24 памяти, вторые входы схем ИЛИ 32 и 36 соединены с кнопкой "Сброс" 39, выход схемы ИЛИ 32 соединен с входами сброса триггеров 30 и 33, выход схемы ИЛИ 36 является пятым выходом блока 26 управления и соединен с входами счетчиков 15, 23 и триггера 13.
Устройство работает следующим образом. Нажатием кнопки "Сброс" 39 блока обработки фотоинформации он готов к работе. После нажатия кнопки "Пуск" 34 происходит включение блока 7 обработки и с первого выхода блока 26 управления поступает сигнал на включение лазерного источника 1 света, когерентный свет которого расходясь как от точечного источника, попадает на сферическую линзу 3 и, проходя через нее, преобразуется в сходящийся пучок света, который фиксируется (собирается) на вращающейся поверхности детали 8 в некоторой точке О1 (фиг. 3). Для этого расстояние от лазерного источника 1 света до линзы 3, равное l, и расстояние от линзы 3 до поверхности детали 8, равное L, должны быть связаны уравнением тонкой линзы +
+  =
=  , (1) где f - фокусное расстояние линз 3, 4.
, (1) где f - фокусное расстояние линз 3, 4.
Рассеянный поверхностью детали 8 когерентный свет от лазерного источника 1 обладает спекл-структурой, то есть интенсивность огражденного света меняется от точки к точке в пространстве (промодулировано по пространству), а также из-за вращения объекта 8 интенсивность промодулирована во времени. Временная модуляция интенсивности рассеянного когерентного света связана с тем обстоятельством, что микрошероховатости поверхности 8, попавшие в освещенное пятно, и на которых происходит рассеяние света, непрерывно меняются. Интенсивность рассеянного света регистрируется фотоприемником 5 и за время Т в блок 7 обработки поступает с фотоприемника 5 электрический сигнал Т1(t), 0 < t ≅Т, пропорциональный зарегистрированной интенсивности света.
Последующая обработка этого электрического сигнала основана на том, что средний период модуляции То сигнала I1(t) однозначно связан с линейной скоростью вращения объекта 8 в точке О1, т.е. с величиной R1 ω, по формуле
Т0 = А[R1ω ]-1, (2) где R1 - расстояние от центра вращения О детали 8 до точки фокусировки света О1 (фиг. 3); ω - угловая скорость вращения детали 8; А - коэффициент пропорциональности. Согласно (2) и зная средний период модуляции сигнала Т0, зная значение ω и определения из серии предварительных испытаний константу А, можно определить радиус окружности R1, по которой вращаются те шероховатости поверхности 8, которые попадают в освещенное пятно с центром в точке О1.
Далее электрический сигнал с фотоприемника 5 поступает на усилитель 9 и, усиливаясь до заданной величины, попадает на вход коммутатора 10, который открывается к этому моменту времени с помощью сигнала с третьего выхода блока 26 управления. С выхода коммутатора 10 сигнал попадает на входы пиковых детекторов максимума 11 и минимума 21, а также на вторые входы компараторов 12 и 22. Пиковый детектор 11 максимума дает задержку на один тактовый импульс. Сигнал на выходе пикового детектора 11 растет до тех пор, пока возрастает сигнал на его входе. Поэтому на первый вход компаратора 12 поступает сигнал с выхода пикового детектора 11 растет до тех пор, пока возрастает сигнал на его входе. Поэтому на первый вход компаратора 12 поступает сигнал с выхода пикового детектора 11, который меньше по величине, чем сигнал с выхода коммутатора 10, который поступает на второй вход компаратора 12. Компаратор 12, управляемый сигналом с таковой частотой, сравнивает два входных сигнала, и пока сигнал I1(t) монотонно возрастает, на выходе компаратора 12 имеет место нулевой сигнал. В момент времени, когда сигнал на втором входе компаратора 12 становится меньше, чем сигнал на первом входе, компаратор 12 срабатывает и на его выходе появляется ненулевой сигнал, который устанавливает триггер 13 в открытое положение, увеличивает число счетчика 23 периодов на единицу и открывает пиковый детектор 21 минимума.
Когда сигнал I1(t), достигнув максимума, монотонно спадает, и на первый вход компаратора 22 поступает сигнал с выхода пикового детектора 21 минимума, который больше, чем текущий сигнал с выхода коммутатора 10, поступающий на второй вход компаратора 22. При таком соотношении сигналов на входах компаратора 22 на его выходе появляется нулевой сигнал, запирающий пиковый детектор 11 максимума. Такое состояние компараторов 12, 22 сохраняется до тех пор, пока сигнал I1(t) не достигнет своего минимального значения.
В следующий после этого момент времени, когда текущий сигнал на втором входе компаратора 22 оказывается меньше, чем сигнал на его первом входе, на выходе компаратора 22 появляется ненулевой сигнал, открывающий пиковый детектор 11 максимума. И все повторяется: ненулевой сигнал на входе компаратора 12 появится в момент достижения сигналом I1(t) следующего максимального значения. Этот сигнал с выхода компаратора 12 увеличит еще на единицу значение числа в счетчике 23 периода. Таким образом, счетчик 15 длины выборки будет подсчитывать количество тактовых импульсов М, которые генерируются генератором 27 в блоке 26 управления, начиная с первого максимума в сигнале I1(t), когда устанавливается триггер 13, и кончая в момент времени Т. Момент времени Т задается с помощью установки К-разрядного счетчика 29 (К = [log2K]) на число К тактовых импульсов Т = К Δτ , Δτ - временная протяженность тактового импульса. Поэтому к моменту времени Т на выходе счетчика 15 длины появится в двоичном коде с m-разрядностью число М (m = [log2M] ). Счетчик 23 периодов за время Т подсчитает число максимумов в сигнале I1(t), и на его выходе появится в двоичном коде с m-разрядностью число М1. Сигналы с выходов счетчиков 15 и 23 поступают по m-разрядным адресным шинам на два входа делителя 16, на выходе которого появляется в двоичном коде число Т0, равное
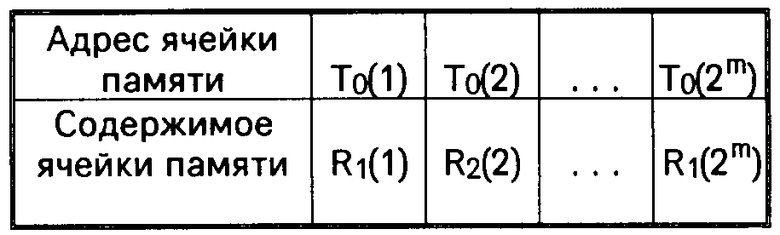
To =  (3) которое пропорционально среднему периоду сигнала I1(t), подсчитанному за время выборки Т. Это число по m-разрядной шине поступает на вход постоянно-запоминающего устройства 17, в котором в ячейках памяти с адресными значениями Т0(i) находятся числа R1(i), i = 1,2,...,2m, найденные в соответствии с формулой (2) из предшествующих испытаний и запрограммированные в памяти 17 в виде(cм.таблицу).
(3) которое пропорционально среднему периоду сигнала I1(t), подсчитанному за время выборки Т. Это число по m-разрядной шине поступает на вход постоянно-запоминающего устройства 17, в котором в ячейках памяти с адресными значениями Т0(i) находятся числа R1(i), i = 1,2,...,2m, найденные в соответствии с формулой (2) из предшествующих испытаний и запрограммированные в памяти 17 в виде(cм.таблицу).
Таким образом, в момент времени Т на выходе памяти 17 появится сигнал, равный одному из чисел R1(i) из таблицы (4), который по m-разрядной адресной шине поступает на входы регистров 18 и 24 памяти. К этому моменту времени устанавливается интенсивный сигнал на триггере 30, который открывает вентиль 35, и с шестого выхода блока 26 управления поступает сигнал на управляющий вход регистра 18 памяти, так что число R1(i) записывается в регистр 18.
К этому моменту времени блок 26 управления генерирует сигналы, которые выключают лазерный источник 1 света, включают лазерный источник 2 света, переключают коммутатор 10 на прием сигнала с фотоприемника 6 и усилителя 20, а также обнуляют значения счетчиков 15, 23 и устанавливают триггер 13 в нулевое положение и закрывают вентиль 14. Это происходит следующим образом. После прохождения К тактовых импульсов через счетчик 29 он посылает такой сигнал на триггер 30, что на втором выходе триггера 30 появляется нулевой сигнал, поступающий с первого выхода блока 26 управления через усилитель 38 на управляющий вход лазерного источника 1 света и выключает его. Этот же сигнал с второго выхода триггера 30 закрывает вентиль 35 и с шестого выхода блока 26 управления на управляющий вход регистра 18 памяти уже не поступает сигнал на запись. На первом выходе триггера 30 к этому моменту времени (после К тактовых импульсов, определяющих длину выборки фотосигнала) появляется нулевой сигнал, который, во-первых, поступает с третьего выхода блока 26 управления на управляющий вход коммутатора 10 и переключает его на прием второго канала с усилителя 20, а, во-вторых, через усилитель 37 с второго выхода блока 26 управления включает лазерный источник 2 света. Также сигнал с выхода счетчика 29, проходя через схему ИЛИ 36, поступает с пятого выхода блока 26 управления на входы счетчиков 23, 15 и триггера 13, обнуляет значения этих счетчиков и изменяет состояние триггера 13.
Далее за время с Т до 2Т блок 7 обработки информации аналогично обрабатывает сигнал с второго фотоприемника 6:I2(t), T ≅ t ≅ 2T. То есть счетчик 15 подсчитает число М - общую длину в тактовых импульсах всех периодов модуляции сигнала, а счетчик 23 подсчитает число М1 - число периодов модуляции. На выходе делителя 16 появится число М0, равное среднему периоду модуляции сигнала I2(t), а на выходе постоянно-запоминающего устройства 17 появится число R1(j) из таблицы (4), равное радиусу окружности, по которой вращаются микрошероховатости объекта 8, попадающие в освещенное пятно с центром О2 (фиг. 3), в которое сфокусируется с помощью линзы 4 пучок когерентного света от лазерного источника 2. Это число R1(j) по m-разрядной адресной шине с выхода памяти 17 поступает на вход регистра 24 памяти, где и запоминается. Это происходит следующим образом. После того, как счетчик 29 насчитает еще К тактовых импульсов, с его выхода поступает сигнал, который открывает вентиль 31 и на выходе вентиля 31 появляется сигнал, который поступает с седьмого выхода блока 26 управления на управляющий вход регистра 24 памяти - это сигнал на запись. Кроме того, сигнал с выхода вентиля 31 поступает также на вход схемы ИЛИ 32 и, проходя через нее, поступает на входы сброса триггеров 30 и 33. Это приводит к тому, что на выходе триггера 33 устанавливается нулевой сигнал, который закрывает вентиль 28, то есть к моменту времени 2Т из болтов 26 управления перестают поступать все сигналы.
После этого на два входа постоянно запоминающего устройства 25 по m-разрядным шинам поступают два адреса R1(i) и R1(j). В памяти 25 запрограммированы в ячейках с адресами {R1(i), R1(j)} числа Хij, представляющие матрицу чисел в двоичном коде. Соответствие между адресами R1(i) и R1(j) и числами Xij устанавливается формулой
x =  , (5) где R1 - расстояние между точками О и О1; R2- расстояние между точками О и О2; а - расстояние между источниками 1 и 2 (или между точками О1 и О2); х - горизонтальная координата центра вращения О делители 8 относительно источника 1; R1(i) - отсчеты радиуса R1; R1(j) - отсчеты радиуса R2; Xij - отсчеты горизонтальной координаты Х (см. фиг. 3).
, (5) где R1 - расстояние между точками О и О1; R2- расстояние между точками О и О2; а - расстояние между источниками 1 и 2 (или между точками О1 и О2); х - горизонтальная координата центра вращения О делители 8 относительно источника 1; R1(i) - отсчеты радиуса R1; R1(j) - отсчеты радиуса R2; Xij - отсчеты горизонтальной координаты Х (см. фиг. 3).
Число Хij, появляющееся через время, несколько большее, чем на выходе постоянно-запоминающего устройства 25, с одной стороны, по m-разрядной шине поступает на выход блока 7 обработки, а, с другой стороны, по адресной шине поступает на второй вход постоянно-запоминающего устройства 19, на первый вход которого с регистра 18 памяти также поступает по адресной шине сигнал R1(i). В постоянно-запоминающем устройстве 19 запрограммированы в ячейках с адресами { Xij, R1(i)} числа Yij, представляющие матрицу чисел в двоичном коде. Соответствие между адресами Хij, R1i и числами Yijустанавливается формулой
y =  , где y - вертикальная координата центра вращения О детали 8; Yij - отсчеты координаты y. На выходе памяти 19 появится в двоичном коде числа Yij, которое поступает на второй выход блока 7 обработки фотоинформации.
, где y - вертикальная координата центра вращения О детали 8; Yij - отсчеты координаты y. На выходе памяти 19 появится в двоичном коде числа Yij, которое поступает на второй выход блока 7 обработки фотоинформации.
Через время, несколько большее чем 2Т, на выходе всего устройства появятся числа Хij и Yij, равные координатам центра вращения детали 8 и отсчитываемые от лазерного источника 1 света.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФОТОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАМЕТРА ПОДВИЖНОГО ИЗДЕЛИЯ | 1995 |
|
RU2095750C1 |
| Устройство для цифрового измерения частоты медленно меняющихся процессов | 1987 |
|
SU1413542A1 |
| Аналого-цифровой частотомер | 1988 |
|
SU1712894A1 |
| Устройство для цифрового измерения частоты | 1989 |
|
SU1666965A2 |
| ТЕЛЕВИЗИОННАЯ КАМЕРА ДЛЯ НАБЛЮДЕНИЯ В УСЛОВИЯХ СЛОЖНОГО ОСВЕЩЕНИЯ И/ИЛИ СЛОЖНОЙ ЯРКОСТИ ОБЪЕКТОВ | 2011 |
|
RU2472299C1 |
| УСТРОЙСТВО ОДНОКРАТНОГО ФОРМИРОВАНИЯ СИГНАЛА ИЗОБРАЖЕНИЯ | 1998 |
|
RU2146080C1 |
| ТЕЛЕВИЗИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2451419C1 |
| Система экстремального регулирования | 1985 |
|
SU1352452A1 |
| ТЕЛЕВИЗИОННАЯ КАМЕРА ДЛЯ НАБЛЮДЕНИЯ В УСЛОВИЯХ ИЗМЕНЯЮЩЕЙСЯ ВО ВСЕМ ПОЛЕ ЗРЕНИЯ ОСВЕЩЕННОСТИ И/ИЛИ ЯРКОСТИ ОБЪЕКТОВ | 2011 |
|
RU2472300C1 |
| МНОГОКАНАЛЬНОЕ АКУСТИКО-ЭМИССИОННОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИЗДЕЛИЙ | 1995 |
|
RU2105301C1 |
Использование: в прецизионном станкостроении и оптической промышленности. Сущность изобретения: устройство содержит два лазерных источника света, два фотоприемника, две сферические линзы, блок обработки, содержащий два усилителя, коммутатор, два пиковых детектора, два коммутатора, триггер, вентиль, два счетчика, делитель, три постоянно-запоминающих узла, два регистра, блок управления. 4 ил., 1 табл.
ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЦЕНТРА ВРАЩЕНИЯ ДЕТАЛИ, содержащее первый лазерный источник света, первый фотоприемник и блок обработки информации, отличающееся тем, что, с целью повышения производительности за счет исключения контакта с деталью, в него введены второй лазерный источник света, оптическая ось которого параллельна оси первого лазерного источника света, две сферические линзы, каждая из которых расположена на оси соответствующего источника света, и второй фотоприемник, причем оба фотоприемника расположены на одинаковом расстоянии от соответствующих источников света с возможностью оптического сопряжения с ними через поверхность детали, а блок обработки информации выполнен в виде последовательно соединенных первого усилителя, коммутатора, первого пикового детектора, первого компаратора, триггера, вентиля, первого счетчика, делителя, первого постоянно-запоминающего узла, первого регистра и второго постоянно-запоминающего узла, а также второго усилителя, второго пикового детектора, второго компаратора и второго счетчика, второго регистра, третьего постоянно-запоминающего узла и блока управления, при этом выход второго усилителя соединен с вторым входом коммутатора, выход которого соединен с вторым входом первого компаратора, входом второго пикового детектора и первым входом второго компаратора, выход второго пикового детектора соединен с вторым входом второго компаратора, выход которого соединен с управляющим входом первого пикового детектора, выход первого компаратора соединен с управляющим входом второго пикового детектора и первым входом второго счетчика, выход которого соединен с вторым входом делителя, выход первого постоянно-запоминающего узла соединен с входом второго регистра, выход которого соединен с первым входом третьего постоянно-запоминающего узла, выход которого соединен с вторым входом второго постоянно-запоминающего узла, выход первого регистра соединен с вторым входом третьего постоянно-запоминающего узла, первый и второй выходы фотоприемников соединены соответственно с входами первого и второго усилителей, входы лазерных источников света соединены соответственно с первым и вторым выходами блока управления, третий вход блока управления соединен с управляющим входом коммутатора, четвертый выход блока управления соединен с управляющими входами первого и второго компараторов и вторым входом вентиля, пятый выход блока управления соединен с управляющими входами триггера и входами первого и второго счетчиков, шестой и седьмой выходы блока управления соединены с управляющими входами первого и второго регистров, а второй и третий постоянно-запоминающие узлы выполнены с информационными выходами.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США N 4566202, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
