Изобретение относится к области радиолокационной и сейсмоакустической разведки с применением импульсных источников возбуждения и может быть использовано для геологического картирования, поисков полезных ископаемых, а также при инженерно-строительных, гидрогеологических и археологических изысканиях.
Известен способ высокочастотной геоэлектромагнитной разведки, основанный на возбуждении передающей антенны перепадом напряжения (авт.св. СССР N 1078385, кл. G 01 V 3/12, 25.06.82). Этот способ, обладая высокой производительностью, не использует динамических характеристик эхо-сигналов, регистрируется существенно искаженная волновая картина. Кроме того, метод обладает чувствительностью к помехам, к погодным и климатическим условиям, а это снижает его глубинность, требует частой привязки показаний к опорным точкам и профилям, что уменьшает производительность полевых исследований. В общем случае глубинность этого метода связана с частотным спектром импульсных электромагнитных воздействий, а значит, исходя из требований согласования антенны, и с ее параметрами. Этот способ не использует возможностей количественной интерпретации, предоставляя пользователю лишь наглядность картины компрессированных эхо-сигналов.
Широко известен способ сейсморазведки малых глубин, основанный на накоплении эхо-сигналов от импульсных воздействий. Аппаратура, реализующая этот способ, повсеместно используется для изучения зоны малых скоростей (Сейсморазведочная аппаратура малых глубин для инженерно-строительных изысканий. Л. А. Лозовский, Сб. Прибалтийская геотехника, Вып. VII, Рига, 1991). Способ состоит в проведении импульсных воздействий на грунт с интервалом, превышающим длительность эхо-сигнала, запоминании последовательности выборок эхо-сигнала и суммировании соответствующих выборок эхо-сигналов последующих импульсных воздействий. Способ позволяет снизить несингенетичную помеху в Vn раз, где n - количество накоплений. Недостатками способа являются снижение производительности полевых работ и сравнительно малое снижение помехи.
Известно устройство (авт.св. СССР N 1728812, кл. G 01 V 1/00, 19.08.89, реализующее способ, в соответствии с которым импульсные воздействия на грунт производят с интервалом, не меньшим длительности записи эхо-сигнала, а сигнал с момента первого воздействия дискретизируют, взвешивают, заносят в память по номерам адреса, соответствующим порядковым номерам интервалов дискретизации, считывают в том же порядке с момента второго воздействия и перемножают в реальном времени в эхо-сигналом от второго воздействия. Подавление несингенетичной помехи превышает 45 дБ. К недостаткам способа следует отнести предусмотренность его реализации только в реальном времени, что требует усложнения аналогового тракта, снижая общую надежность полевой аппаратуры и точность вычислений. Кроме того, двукратное использование задержанного сигнала в перемножении с незадержанным сигналом увеличивает вклад помехи, которую несет задержанный сигнал.
Известен также способ сейсмической разведки, основанный на возбуждении сейсмических сигналов двумя разнесенными на временной интервал импульсными воздействиями (авт.св. N 583900, кл. G 01 V 1/00, 17.02.88), в котором для увеличения глубинности метода временной интервал между импульсными воздействиями устанавливают равным 3-4 периодам возбуждаемого сигнала, а амплитудные значения принимаемого сигнала динамически сжимают, задерживают по времени на величину временного интервала между импульсными воздействиями, значения задержанного сигнала перемножают в текущем времени со значениями незадержанного сигнала, а произведение перемножают со значениями задержанного сигнала и образованный таким образом сигнал усиливают по закону, обратному закону динамического сжатия. Способ предусматривает как бы "мечение" сигнала возбуждения нулевой фазой, что позволяет облегчить корреляционное выделение принимаемого сигнала на фоне помех. Недостатки этого способа - возможность реализации только в реальном времени и увеличение вклада помехи, находящейся в задержанном сигнале.
Известна система для комплексных геофизических исследований (патент США N 4899322, кл. G 01 V 1/00, 1990), содержащая радиолокационное устройство для обнаружения погребенных границ, акустическое устройство обнаружения, сейсмограф, лазерное оборудование, устройство для определения удельного сопротивления земли и ряд других геофизических устройств. С каждой геофизической установкой соединен процессор, собирающий информацию и передающий ее в регистратор данных. К регистратору данных подключена ЭВМ, объединяющая информацию, поступающую от датчиков. Обработанная на ЭВМ информация воспроизводится на дисплее или распечатывается. Данная система выбрана в качестве прототипа. К ее недостатку можно отнести отсутствие единой измерительной процедуры, значительно упрощающей конструкцию. Используется несколько предварительных измерительных каналов (по числу датчиков), что приводит к накапливанию различных систематических ошибок, а это снижает точность последующей комплексной обработки результатов исследований. Кроме того, мощности ЭВМ не используются при сборе и компоновке информации. Эти функции возложены на процессоры - значительно менее мощные вычислительные структурные единицы, чем ЭВМ. Это лишает возможности оператора эффективно вмешиваться в процесс исследований, что снижает информативность и производительность процесса съемки.
Решаемой задачей является повышение производительности исследований, точности определения разреза и глубинности за счет повышения отношения сигнал/помеха, а также упрощение конструкции.
Для ее реализации принятые эхо-сигналы радиолокационного и сейсмозондирования обрабатывают в единой измерительной процедуре, для чего радиосигналы преобразуют во времени в частотный диапазон сейсмоакустических эхо-сигналов, все эхо-сигналы фильтруют и предварительно обрабатывают в одной и той же программно-аппаратной среде, причем предварительную обработку проводят следующим образом: вычисляют произведение эхо-сигналов от трех последовательных возбуждений и суммируют по 5-30 произведений в зависимости от скорости, глубины и детальности разведки, устанавливают различие эхо-сигналов сейсмоакустического и радиозондирования от опорного горизонта вводят коррекцию рассогласования при обработке сейсмоакустических эхо-сигналов и возбуждение радиолокационного зондирующего импульса производят двумя импульсными воздействиями, причем временной интервал между импульсными воздействиями устанавливают в пределах 0,25 - 1 периода зондирующего сигнала.
Устройство геофизической комплексной разведки включает в себя радиолокационный датчик, сейсмоакустический датчик, аналоговый канал, процессор, систему накопления и регистрации данных, ЭВМ, отслеживающий преобразователь частоты и носитель прикладных программ, причем вход слежения отслеживающего преобразователя частоты подключен к сейсмоакустическому датчику, управляемый вход подключен к процессору, а выход - к управляемому входу стробоскопа, выход стробоскопа подключен к входу аналогового тракта, процессор с помощью двунаправленной шины подключен к ЭВМ, а ЭВМ управляемым входом подключена к носителю пакета прикладных программ и управляющим выходом - к системе накопления и регистрации данных.
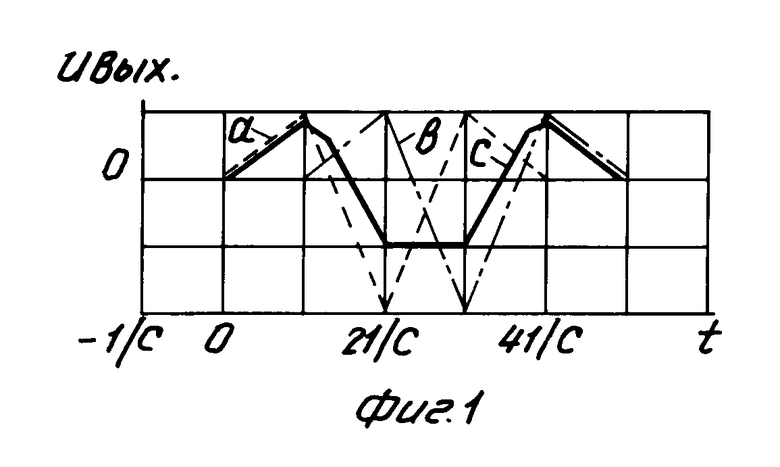
На фиг.1 показаны сигнал, полученный при возбуждении антенны перепадом напряжения (а), сигнал, сдвинутый относительно первого на 0,25 периода (b) и равнодействующий сигнал (с); на фиг.2 приведена блок-схема устройства, реализующего предлагаемый способ.
Общеизвестно, что математический аппарат обработки для способов сейсмической разведки является наиболее развитым в геофизике. Это налагает повышенные требования к качеству регистрируемой волновой картины. Сейсмоакустические способы используют, как правило, полосковую фильтрацию, многоразрядное взвешивание (10-16 разрядов), специальные приемы помехоподавления, что обеспечивает широкий диапазон регистрации волновой картины.
Фактически, радиолокационное зондирование с поверхности земли является электромагнитным аналогом сейсмоакустического зондирования. Поэтому трансформация высокочастотной волновой картины, получаемой в процессе радиолокационного зондирования, в частотный диапазон сейсмоакустического сигнала позволяет использовать не только мощный интерпретационный аппарат сейсморазведки, но и канал предварительной обработки и регистрации полевой сейсморазведочной аппаратуры, что несомненно повышает качество и информативность получаемой информации.
Использование метода сейсмозондирования в процессе радиолокационной съемки позволяет избавиться от привязочных ходов на опорные точки и профили, так как результаты сейсмозондирования практически не зависят от погодных условий, а также суточных и климатических обстоятельств. В то же время надежно привязанные к результатам сейсмоакустического зондирования данные весьма производительной радиолокационной съемки позволяют значительно сократить объемы полевых сейсморазведочных работ, особенно на сравнительно простых с геологической точки зрения участках исследования.
Улучшить отношение сигнал/помеха и тем самым расширить динамический диапазон регистрируемой волновой картины, а значит, и увеличить глубинность исследований, не ухудшая разрешающей способности, позволяет дополнение известного способа операцией перемножения с эхо-сигналом третьего импульсного воздействия, для чего необходимо после операций усиления, фильтрации и динамического сжатия запомнить эхо-сигналы трех импульсных воздействий, перемножить их, усилить произведение по закону, обратному закону сжатия, и запомнить произведение. Произведения каждых трех эхо-сигналов в соответствии с требованиями детализации и глубинности исследований можно просуммировать (накопить), и суммарный сигнал зарегистрировать.
Двойное перемножение двух эхо-сигналов, используемое в известных способах, принято из требования сохранения полярной нейтральности получаемого сигнала-произведения. Однако двойное участие одного и того же сигнала в перемножении с вторым эхо-сигналом в значительной мере сохраняет помеху, которую несет первый сигнал. Поэтому перемножение трех независимых эхо-сигналов в значительной мере (не менее 60 дБ) снижает несингенетичную помеху.
Суммирование получаемых произведений эхо-сигналов позволяет дополнительно снизить мультипликационную помеху преобразования и минимизировать корреляционный фон.
Форма сигнала радиолокационного зондирования проста (см. фиг.1) и, практически, не меняется при перемещении на поверхности земли. Форма сейсмоакустического зондирующего сигнала в значительной мере зависит от качества установки возбудителя сигналов на поверхности грунта и от собственных механических параметров грунта. Это объясняет значительное различие от точки зондирования к точке сейсмоакустических сигналов. Кроме того, форма сейсмоакустического сигнала содержит обычно несколько периодов колебаний, что сглаживает отличия искусственного сигнала и сигнала помех, например, микросейсм.
Если установить отличия на точке зондирования эхо-сигналов радиозондирования и сейсмоакустического от одного и того же опорного горизонта, например, путем вычисления отношения и затем перемножить сейсмоакустическую трассу на это отношение, получается как бы "мечение" простым полуторапериодным сигналом радиозондирования сложного многопериодного сейсмоакустического сигнала. Эта операция позволяет облегчить выделение метки на фоне помех, особенно в конце сейсмотрассы, что увеличивает надежность выделения полезного сигнала и наглядность сейсмоакустического разреза при экспресс-контроле.
Разрешающая способность радиолокационного зондирования определяется минимально измеряемым интервалом времени tмин между отражениями от границ слоя. Согласно критерию Рэлея разрешающая способность определяется длительностью радиоимпульсов r на уровне 0,5 от максимальной амплитуды, т.е. tмин = r. Отсюда минимально измеряемая толщина слоя hмин = v * r/2, где v - скорость распространения радиоимпульса в измеряемой среде.
Другой важный параметр радиолокационного зондирования - необходимый динамический диапазон. Он определяется максимально возможным отношением амплитуд сигналов, отраженных от верхней (Ев) и нижней (Ен) границ слоя:
D = 20 lg(Eв/Ен) = 2Гмакс*h где Гмакс - максимально допустимое удельное затухание;
h - толщина слоя.
Для достаточно тонких слоев при tмин = r динамический диапазон определяется отношением амплитуд главного и первого бокового лепестков сигналов. Практически путем скругления амплитудно-частотной характеристики, что связано с расширением главного лепестка, можно обеспечить D = 15-20 дБ. Полагая, например, для hмин = 0,5 м значение D = 15 дБ, получают максимально допустимое удельное затухание Гмакс = 15 дБ/м. Можно отметить, что такое максимально допустимое затухание выполняется, например, для влажного песчаника на частотах зондирования, меньших 100 МГц, и мощности слоя 0,5 м. Для слоев, больших 0,5 м, допустимое значение Гмакс значительно меньше.
Из сказанного следует, что требования высокой разрешающей способности и глубинности метода противоречивы и применение способа радиолокационного зондирования определяется компромиссным выбором между требованием, с одной стороны, получения точных значений о геологическом разрезе и, с другой стороны, необходимостью распространения этих знаний на заданную глубину. Поэтому весьма важным представляется увеличение глубинности метода радиолокационного зондирования без снижения разрешения.
В авт.св. N 1583900 осуществляется автофильтрация, т.е. фильтрация полезного сигнала ориентируется на текущее значение этого же аналогового сигнала. Автофильтрация осуществляется путем аналогового перемножения сигнала в текущем времени с сигналом, задержанным на интервал возбуждения. При этом перемножаемые сигналы от второго возбуждения и задержанные на интервал возбуждения сигналы от первого возбуждения являются синфазными. Все остальные перемножаемые сигналы, не совпадающие по фазе, эффективно подавляются. Такой прием позволяет с высокой степенью надежности выделить сигнал от второго возбуждения, слабо интерферирующей по отношению к первому, и в значительной мере избавиться от помех, не меченных интервалом возбуждения. Кроме того, в общем случае структура волновой картины закономерно изменяется от трассы к трассе вследствие кинематических особенностей ее регулярных компонент, т.е. полезная компонента эхо-сигнала является пространственно не стационарной, и функция автокорреляции зависит от местоположения трасс записи. Известный способ вводит пространственно стационарную компоненту - интервал между возбуждениями, и вычисление функции корреляции производят с постоянным шагом, что позволяет произвести надежную фильтрацию полезного сигнала, снизить мультипликационную помеху и минимизировать корреляционный фон на этапе обработки. Увеличение интервала между воздействиями, в принципе, не должно снижать качества фильтрации. Однако уменьшение интервала, начиная с интервала, равного одному периоду возбужденного сигнала и менее, приводит к новому эффекту - снижению частотной характеристики зондирующего сигнала.
Из фиг.1 видно, что равнодействующий сигнал двух возбуждений, сдвинутых на 1/4 периода, является более низкочастотным, чем первичные сигналы. Это позволяет значительно снизить затухание зондирующего импульса. Так, например, затухание во влажных суглинках, пластичных глинах, при зондировании на частоте 100 МГц (первичный импульс) приблизительно 16-17 дБ/м, при предлагаемом способе приблизительно 10 дБ/м, что соответствует частоте зондирования 75 МГц. В то же время двухимпульсное с интервалом зондирование по предлагаемому способу не снижает разрешения метода, так как корреляционная функция настроена на более высокочастотный первичный импульс.
Весьма важным для идентификации геологических пород представляется использование параметра Г-затухания электромагнитной волны. Если параметры среды vф и е-фазовая скорость электромагнитной волны и диэлектрическая проницаемость изменяются для геологических пород в пределах 1,5 порядка величины, то затухание 3-5 порядков.
Расширение динамического диапазона регистрируемой волновой картины радиолокационного зондирования и придание большей помехоустойчивости методу позволяют воспользоваться параметром Г-удельного затухания для тонкой дифференциации горных пород и особенно осадочных образований в зависимости от их состава и влажности, что является особенно важным при инженерно-геологических изысканиях.
Предлагаемый способ осуществляется следующим образом.
На участке исследования определяют частотный диапазон сейсмоакустического сигнала и преобразуют принимаемый в заданном метровом диапазоне, образованный одним или двумя сдвинутыми по времени на 0,25 - 1 период импульсными воздействиями эхо-сигнал радиоволнового зондирования в частотный диапазон сигналов сейсмоакустического зондирования. Преобразованный сигнал радиоволнового зондирования подают на аналоговый вход сейсмоакустического тракта, где его усиливают, фильтруют и взвешивают в широком динамическом диапазоне (8-12 двоичных разрядов), точно так же, как и эхо-сигналы сейсмоакустического зондирования. Далее цифровой эквивалент эхо-сигнала передается в ЭВМ, где вычисляется произведение трех последовательных во времени сигналов. Затем полученные произведения суммируют по 5-30 в зависимости от цели исследования и скорости перемещения по профилю (для радиоволнового зондирования). Для сейсмоакустического зондирования количество накоплений сейсмосигналов на стоянке определяется необходимостью получения надежного отражения с заданной глубины. Оператор фиксируют (по дисплею) фазы и длительности фрагментов отраженных от опорного горизонта сейсмоакустического и радиоволнового сигналов, и исходный сейсмосигнал корректируется (кореллируется, маскируется, и т.д.).
Примером реализации способа может служить устройство для геофизической комплексной разведки, блок-схема которого приведена на фиг.2.
Модуль передатчика 1 и модуль приемника 2 вместе со стробоскопом 3 и отслеживающим преобразователем 4 частоты представляют собой выносной блок. Следящий вход отслеживающего преобразователя частоты подключен к первому выходу сейсмоакустического датчика 5, управляемый вход подключен к процессору 7, а управляющий выход - к управляемому входу стробоскопа, выход которого подключен к входу аналогового тракта 6. К этому же входу подключен второй выход сейсмоакустического датчика, который является вторым выносным блоком. Управляемый вход аналогового тракта подключен к управляющему выходу процессора, а выход аналогового тракта - к информационному входу процессора. Управляемый вход/информационный выход (1/0) процессора соединен двунаправленной шиной с соответствующим входом-выходом ЭВМ 8. К второму такому же информационному входу /управляющему выходу ЭВМ подключена система 9 накопления и регистрации данных. К управляемому входу ЭВМ подключен носитель 10 пакета прикладных программ.
Устройство работает следующим образом.
Частотный диапазон сейсмоакустического сигнала определяется при работе датчика 5. С помощью отслеживающего преобразователя 4 частоты задается такой коэффициент преобразования, чтобы сигнал на выходе стробоскопа 3 радиолокационного датчика по частоте соответствовал сейсмоакустическому эхо-сигналу. Далее эхо-сигналы поступают на вход аналогового тракта 6, состоящего из предусилителя, управляемого усилителя и универсального управляемого фильтра, реализующего фильтры высоких, низких частот, полосового и режекторного. Аналоговый тракт завершается аналого-цифровым преобразователем, с выхода которого информация процессором 7 передается на ЭВМ 8, где обрабатывается, компонуется, выносится для контроля оператора на дисплей и передается на систему 9 накопления и регистрации данных.
Практически работа с аппаратурой осуществляется следующим образом. На участке исследования определяется с помощью сонара частотный диапазон сейсмоакустического сигнала, оптимальные фильтрация и усиление аналогового тракта. Определяется вид сейсмосигнала от опорного горизонта и добиваются надежного отражения от этого горизонта с радаром путем подбора частоты преобразования радиолокационного сигнала. Определяется также оптимальное количество накоплений произведений трех сигналов для сонара и радара. Методика дальнейших работ (площадные, профильные исследования либо точечные зондирования, частота привязки съемки с помощью сонара, соотношение объемов съемки радаром и сонаром и т.д.) определяется задачами исследования.
Носитель 10 пакета прикладных программ содержит управляющие и обрабатывающие программы. С помощью управляющих программ производится самотестирование аппаратуры, управление возбуждением сигналов, управление усилением, фильтрацией аналогового канала, управление взвешиванием сигналов, осуществляется взаимодействие процессора и ЭВМ, вывод информации на дисплей, запись массивов информации на накопитель, привязка материалов съемки. Обрабатывающие программы осуществляют компрессирование и декомпрессирование сигналов, вычисление произведений трех сигналов, вычисление корреляционных функций, накопление сигналов в соответствии с методикой реализации предлагаемого способа.
Наличие в составе аппаратуры отслеживающего преобразователя частоты позволяет представить массивы регистрируемой информации как нормированные эхо-сигналы радара и сейсмоакустического датчика, которые могут быть подвергнуты единой процедуре камеральной обработки, результатом которой является построение разрезов диэлектрической постоянной и акустической жесткости, а также геоэлектрических и геоакустических разрезов.
Использование ЭВМ для управления посредством процессора функциями тестирования и сбора информации, а также для обработки и накопления информации позволяет работать в интерактивном режиме, что дает оператору возможность эффективно управлять процессором сбора информации, оперативно изменять методику, чем достигается повышение производительности и информативности исследований.
Из вышесказанного вытекает, что комплексирование в единой аппаратно-программной среде как на этапе полевых работ, так и при камеральной обработке двух различных по физической сущности методов - радиолокационного и сейсмоакустического зондирования позволяет достичь существенного снижения мультипликативной помехи, расширения динамического диапазона, использовать для идентификации горных пород весьма дифференцирующий их параметр - затухание электромагнитной волны, что повышает достоверность геологической интерпретации и расширяет возможности геофизических исследований.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ И УСТРОЙСТВО "ДИФФЕРЕНЦИАЛЬНЫЙ РАДАР" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2148842C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ "МЕТАРАДАР" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263934C1 |
| СПОСОБ ПОИСКА ОБЪЕКТОВ ИСКУССТВЕННОГО ПРОИСХОЖДЕНИЯ В ЗЕМЛЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2390801C1 |
| СПОСОБ И СИСТЕМА РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМНЫХ НЕДР | 2009 |
|
RU2436130C2 |
| Способ сейсмической разведки | 1988 |
|
SU1583900A1 |
| СПОСОБ ГЕОРАДИОЛОКАЦИИ МНОГОЛЕТНЕМЕРЗЛЫХ ПОРОД | 2011 |
|
RU2490671C2 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 2010 |
|
RU2436134C1 |
| Устройство для сейсмической разведки | 1989 |
|
SU1728812A1 |
| СПОСОБ "МЕТАСВЯЗЬ" ЭФИРНОЙ ПЕРЕДАЧИ-ПРИЕМА ИНФОРМАЦИИ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2234190C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2455664C1 |
Использование: в области радиолокационной и сейсмоакустической разведки с применением импульсных источников возбуждения для геологического картирования, поиска полезных ископаемых, а также при инженерно-строительных и гидрогеологических изысканиях. Сущность изобретения: излучают радио- и сейсмоакустические сигналы. Принятые радио-эхо-сигналы преобразуют в частоту сейсмоакустических эхо-сигналов. Далее все эхо-сигналы усиливают, фильтруют, взвешивают и предварительно обрабатывают с использованием одних и тех же аппаратно-программных средств. При этом предварительная обработка включает в себя вычисление произведений эхо-сигналов от последовательных возбуждений и суммирование по 5 - 30 произведений в зависимости от скорости и целей исследований. Для увеличения глубинности разведки вводят коррекцию рассогласования на стадии обработки сигналов с учетом различия сейсмоакустических сигналов и радиосигналов от опорного горизонта. Кроме того, временной сигнал между двумя импульсными воздействиями устанавливают равным 0,25 - 1 периода. Для реализации способа устройство снабжено стробоскопом 3, аналоговым трактом 6 с процессором 7, а также отслеживающим преобразователем 4 частоты. 2 с. и 3 з.п. ф-лы, 2 ил.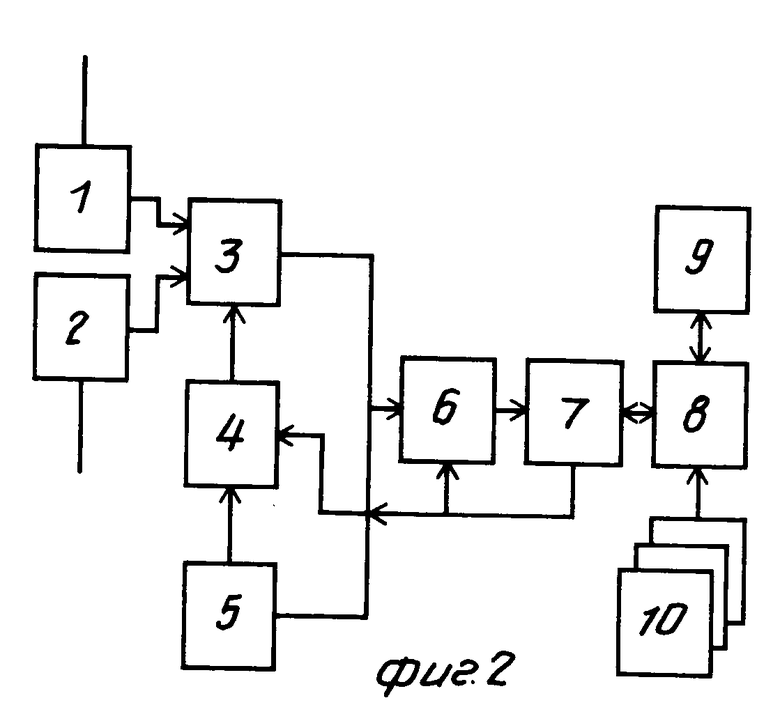
| Патент США N 4899322, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
