Изобретение относится к поисковой технике и может применяться в геофизике, строительстве, археологии, поиске минно-взрывных заграждений.
Известен способ определения местоположения неоднородностей в массиве горных пород (а.с. №1777111, G01V 3/12, опубл. 23.11.92), при котором в двух точках, расположенных на расстоянии с ожидаемым незначительным изменением параметров исследуемого массива, осуществляют излучение-прием с помощью приемопередающих антенн электромагнитных импульсов, сначала поляризованных в плоскости падения, затем ортогонально плоскости падения, измеряя амплитуды и фазы спектральных компонент принимаемых отраженных сигналов, определяют комплексные диэлектрические проницаемости вмещающей породы и неоднородности.
Известен способ измерения расстояния и устройство для его осуществления (патент РФ №2039368, G01S 15/18, опубл. 09.07.95), который включает генерацию и излучение акустического сигнала высокой частоты ω, промодулированного низкой частотой Ω, излучение синхронно с ним электромагнитного сигнала частоты ω, используемого в качестве опорного сигнала, измерение набега фазы Δφ(Ω) на низкой частоте за время прохождения контролируемого расстояния, измерение на высокой частоте давления Р(ω), определение плотности среды ρ, колебательной скорости в направлении распространения V(ω) и инвариантной скорости распространения звука Синв, вычисление фазовой скорости Сф(ω) на высокой частоте в пункте приема по соотношению Cф(ω)=P(ω)/ρ×V(ω), а расстояние определяют по соотношению  Устройство для реализации данного способа содержит на контролирующем объекте передатчик электромагнитных волн, генераторы высокой и низкой частоты, перемножитель, усилитель мощности и акустический излучатель, на контролируемом объекте приемник электромагнитных волн, фазометр, детектор, два фильтра, блок задания инвариантной скорости, два акустических приемника, два усилителя и измерители звукового давления и колебательной скорости.
Устройство для реализации данного способа содержит на контролирующем объекте передатчик электромагнитных волн, генераторы высокой и низкой частоты, перемножитель, усилитель мощности и акустический излучатель, на контролируемом объекте приемник электромагнитных волн, фазометр, детектор, два фильтра, блок задания инвариантной скорости, два акустических приемника, два усилителя и измерители звукового давления и колебательной скорости.
Также известен способ измерения расстояния при воздействии на приемник приемопередатчика акустическим сигналом и устройство для его осуществления (патент РФ №2080616, G01S 11/00, опубл. 27.05.97), который включает сравнение в блоке анализа времени прохождения электромагнитного и акустического сигнала от источника акустического сигнала до приемопередатчика. Источник акустического сигнала располагают на определяемом расстоянии R1 от приемопередатчика, приемник акустического сигнала располагают на расстоянии R2 от источника акустического сигнала, измеряют степень статистической зависимости и разницу времени прихода сигналов к приемнику электромагнитного сигнала и к приемнику акустического сигнала и по этой разнице определяют разницу расстояний R1-R2, а расстояние R2 выбирают известным. Один вариант устройства содержит приемопередатчик, приемник электромагнитного сигнала, блок анализа, блок индикации, приемник акустического сигнала, а другой вариант устройства содержит приемопередатчик, приемник электромагнитного сигнала, источник акустического сигнала, блок анализа, блок индикации, генератор электрического сигнала.
Наиболее близким к заявляемому изобретению является способ геофизической комплексной разведки и устройство для его осуществления (патент РФ №2022301, G01V 1/00, G01V 11/00, опубл. 30.10.94), основанный на возбуждении зондирующих импульсных сейсмоакустических и радиолокационных сигналов. Принятые радиолокационные эхо-сигналы преобразуют в частоту сейсмоакустических эхо-сигналов. Далее все эхо-сигналы усиливают, фильтруют, взвешивают и предварительно обрабатывают с использованием одних и тех же аппаратно-программных средств. При этом предварительная обработка включает в себя вычисление произведений эхо-сигналов от последовательных возбуждений и суммирование по 5-30 произведений в зависимости от скорости и целей исследований. Для увеличения глубинности разведки вводят коррекцию рассогласования на стадии обработки сигналов с учетом различия сейсмоакустических сигналов и радиосигналов от опорного горизонта. Кроме того, временной сигнал между двумя импульсными воздействиями устанавливают равным 0,25-1 периода.
Данный способ реализуется устройством, содержащим радар с передатчиком и приемником, подключенным к стробоскопу, и аналоговым трактом, управляемым процессором, а также сейсмоакустический датчик, ЭВМ и систему накопления и регистрации данных, при этом управляющий выход процессора подключен к управляемому входу аналогового тракта, а информационный вход - к выходу аналогового тракта. При этом устройство дополнительно снабжено отслеживающим преобразователем частоты и носителем пакета прикладных программ управления и обработки, при этом вход слежения отслеживающего преобразователя частоты подключен к сейсмоакустическому датчику, выход - к управляемому входу стробоскопа, а управляемый вход - к процессору, последний подключен к ЭВМ, управляемый вход которой соединен с носителем прикладных программ управления и обработки, а выход - к системе накопления и регистрации данных.
Недостатками известного способа являются малая чувствительность, что не позволяет определять местоположение небольших по объему объектов, низкая помехоустойчивость и высокий уровень ложных тревог.
В основу изобретения положена задача повышения производительности поисковой установки, снижение вероятности ложной тревоги и вероятности пропуска объектов поиска.
Поставленная задача решается тем, что в известном способе, основанном на возбуждении сейсмоакустических и зондирующих радиолокационных сигналов, согласно изобретению сейсмоакустические сигналы возбуждают на частоте механического резонанса объекта поиска F, осуществляют прием радиолокационных эхо-сигналов, выделяют из принимаемых радиолокационных эхо-сигналов полезный сигнал частотой F, измеряют время группового запаздывания сейсмоакустического сигнала относительно принимаемого радиолокационного эхо-сигнала tгр, определяют расстояние от поисковой установки до объекта поиска по соотношению:
D=υзв×tгр,
где υзв - скорость распространения сейсмоакустического сигнала в грунте,
измеряют разность фаз первых гармоник принимаемого радиолокационного эхо-сигнала и опорного акустического сигнала Δφак(Ω), вычисляют величину поправки расстояния от поисковой установки до объекта поиска по соотношению:
ΔD=Δφак(Ω)×λак/2×π,
где λак - длина волны опорного акустического сигнала.
Поставленная задача решается также тем, что в известное устройство, содержащее радар с передатчиком и приемником, коммутируемую приемопередающую антенну, а также последовательно соединенные запоминающее устройство, микроконтроллер и ЭВМ, дополнительно введены генератор СВЧ, первый выход которого подключен к входу передатчика, а второй выход - ко второму входу фазового детектора, выход которого соединен с входом фильтра нижних частот, при этом к первому входу фазового детектора подключен приемник, блок измерения расстояния от поисковой установки до объекта поиска, состоящий из блока измерения времени группового запаздывания сейсмоакустического сигнала относительно принимаемого радиолокационного эхо-сигнала, выход которого соединен с вторым входом запоминающего устройства, и блока измерения разности фаз первых гармоник принимаемого радиолокационного эхо-сигнала и опорного акустического сигнала, выход которого соединен с первым входом запоминающего устройства, при этом вход блока измерения расстояния от поисковой установки до объекта поиска соединен с выходом фильтра нижних частот, а также генератор опорного акустического сигнала, первый выход которого соединен с источником сейсмоакустического сигнала, воздействующий на опорную плиту, а второй выход - со вторым входом блока измерения разности фаз первых гармоник принимаемого радиолокационного эхо-сигнала и опорного акустического сигнала.
Если интенсивность сейсмоакустической волны у поверхности объекта поиска будет равна I, а площадь его поперечного сечения равна S, то амплитуда силы звукового давления на поверхность объекта поиска составляет:
P=I×S.
Поскольку уравнение динамики поверхности объекта без учета влияния среды можно записать как:
то ускорение смещения поверхности объекта будет равно:

где m - масса объекта поиска.
Механический резонанс корпуса объекта поиска увеличивает действие силы Р в число раз, равное величине добротности Q, поэтому выражение (2) можно записать как:
Поскольку интенсивность сейсмоакустической волны I у поверхности границы раздела затухает обратно пропорционально расстоянию D, то приближенно оценить величину действующей силы у поверхности объекта можно с помощью выражения:

где  - интенсивность сейсмоакустической волны вблизи источника;
- интенсивность сейсмоакустической волны вблизи источника;
Rи - эффективный радиус контактной поверхности излучателя сейсмоакустических волн (сигналов) с грунтом;
Р1 - мощность излучателя сейсмоакустических волн (сигналов);.
S - площадь поверхности корпуса объекта поиска, перпендикулярная действующей силе;
D - расстояние до объекта поиска.
Из решения уравнения (1) смещение корпуса объекта под действием силы акустического давления составляет:

где τ - время действия силы акустического давления.
При единичном ударе на интервале 0÷τ величина Р=const, из выражений (3) и (4) получаем:

При периодическом повторении сейсмоакустических импульсов с периодом Т отраженный от объекта радиолокационный сигнал можно записать как:

где ωi=2πfi - циклическая частота радиолокационного сигнала,
λi - длина волны радиолокационного СВЧ-сигнала,
Ω=2πF - циклическая частота сейсмоакустического сигнала,
i - текущий номер гармоники.
Для периодического импульсного сигнала, когда 90% его энергии сосредоточено в первой гармонике, фазовый сдвиг первой гармоники принимаемого радиолокационного эхо-сигнала будет равен:
Путем фазового детектирования отраженного от объекта радиолокационного сигнала, выделяя коэффициент фазовой модуляции Δφ, можно получать информацию о смещении r, прямо пропорциональном согласно выражению (5) отношению: 
Для одинаковых по размеру объектов величина этого смещения тем больше, чем выше добротность его корпуса и меньше масса. Для объектов искусственного происхождения типа мин параметр Q/m будет явно отличаться от естественных объектов (например, камней) или искусственных (например, металлический лом и пр.).
Предлагаемый способ осуществляется следующим образом.
Зону поиска одновременно облучают зондирующими радиолокационными СВЧ-сигналами частотой f и сейсмоакустическими сигналами частотой F. Изменяя частоту колебаний F генератора опорного акустического сигнала, подбирают резонансную частоту для каждого отдельного объекта поиска. При этом выполняется условие с>>υзв, где с - скорость распространения радиолокационного сигнала, υзв - скорость распространения сейсмоакустического сигнала в грунте, поэтому сейсмоакустический сигнал относительно радиолокационного сигнала до зоны поиска доходит с задержкой по времени.
Если радиолокационный сигнал отражается от невибрирующей поверхности, то его частота равна f; а если радиосигнал отражается от вибрирующей поверхности, то его частота равна:
f1=f±F,
т.е. при отражении от вибрирующей поверхности принимаемый радиолокационный эхо-сигнал модулирован частотой F.
Осуществляют прием радиолокационных эхо-сигналов, затем из принимаемых радиолокационных эхо-сигналов путем фазовой демодуляции выделяют полезный сигнал частотой F. Измеряют время группового запаздывания сейсмоакустического сигнала относительно принимаемого радиолокационного эхо-сигнала и разность фаз первых гармоник принимаемого радиолокационного эхо-сигнала и опорного акустического сигнала.
Определяют величину расстояния от поисковой установки до объекта поиска по выражению:
D=υзв×tгр,
где υзв - скорость распространения сейсмоакустического сигнала в грунте;
tгр - время группового запаздывания сейсмоакустического сигнала относительно принимаемого радиолокационного эхо-сигнала,
а величину поправки расстояния от поисковой установки до объекта поиска вычисляют по соотношению:
ΔD=Δφак(Ω)×λак/2×π,
где λак - длина волны опорного акустического сигнала;
Δφак(Ω) - разность фаз первых гармоник принимаемого радиолокационного эхо-сигнала и опорного акустического сигнала.
Сущность изобретения поясняется чертежами, где на фиг.1 представлена блок-схема устройства, реализующего способ поиска объектов искусственного происхождения в земле; на фиг.2 приведены временные диаграммы сигналов.
На блок-схеме устройства (фиг.1) обозначены: r - смещение корпуса объекта под действием силы акустического давления; d - толщина объекта поиска.
Устройство содержит радар с передатчиком 1 и приемником 2, соединенный с коммутируемой приемопередающей антенной 3, генератор СВЧ 4, первый выход которого подключен к передатчику 1, а второй выход - к второму входу фазового детектора 5. Выход приемника 2 соединен с первым входом фазового детектора 5. Выход фазового детектора 5 подключен к входу фильтра нижних частот 6, выход которого соединен с входом блока измерения расстояния от поисковой установки до объекта поиска 7. Блок измерения расстояния от поисковой установки до объекта поиска 7 состоит из блока измерения времени группового запаздывания сейсмоакустического сигнала относительно принимаемого радиолокационного эхо-сигнала 9 и блока измерения разности фаз первых гармоник принимаемого радиолокационного эхо-сигнала и опорного акустического сигнала 8, второй вход которого соединен с вторым выходом генератора опорного акустического сигнала 13. Выход блока измерения времени группового запаздывания сейсмоакустического сигнала относительно принимаемого радиолокационного эхо-сигнала 9 подключен к второму входу запоминающего устройства 10, а выход блока измерения разности фаз первых гармоник принимаемого радиолокационного эхо-сигнала и опорного акустического сигнала 8 - к первому входу запоминающего устройства 10. Запоминающие устройство 10, микроконтроллер 11 и ЭВМ 12 соединены последовательно. Первый выход генератора опорного акустического сигнала 13 подключен к входу источника сейсмоакустического сигнала 14, который воздействует на опорную плиту 15. Объект поиска обозначен цифрой 16.
Устройство работает следующим образом.
Радиолокационные зондирующие сигналы Uрлс частотой f (фиг.2), вырабатываемые генератором СВЧ 4, подаются на передатчик 1 и с помощью коммутируемой приемопередающей антенны 3 излучаются в направлении поиска. Одновременно излучается через опорную плиту 15 и распространяется вдоль земной поверхности сейсмоакустический сигнал Uаu частотой F (фиг.2), вырабатываемый генератором опорного акустического сигнала 13, подключенным к источнику сейсмоакустического сигнала 14. Принятые приемником 2 радиолокационные эхо-сигналы Uотр поступают на первый вход фазового детектора (ФД) 5, второй вход которого подключен к второму выходу генератора СВЧ 4. С выхода ФД 5 радиосигнал поступает на вход фильтра нижних частот (ФНЧ) 6. После ФНЧ 6 полученный радиосигнал поступает на вход блока измерения расстояния от поисковой установки до объекта поиска 7, состоящего из блока измерения времени группового запаздывания сейсмоакустического сигнала относительно принимаемого радиолокационного эхо-сигнала 9 и блока измерения разности фаз первых гармоник принимаемого радиолокационного эхо-сигнала и опорного акустического сигнала 8, второй вход которого соединен с вторым выходом генератора акустического сигнала 13.
Так как скорость распространения радиолокационного сигнала с во много раз превышает скорость распространения сейсмоакустического сигнала υзв, т.е. с>>υзв, то временной интервал между моментом начала излучения и моментом поступления сигнала Uотp на вход блока 8 можно считать временем группового запаздывания tгр (фиг.2).
Полученные значения времени группового запаздывания сейсмоакустического сигнала относительно принимаемого радиолокационного эхо-сигнала и разности фаз первых гармоник принимаемого радиолокационного эхо-сигнала и опорного акустического сигнала записываются в запоминающее устройство (ЗУ) 10. В запоминающем устройстве ЗУ 10 также хранятся величины скоростей сейсмоакустического сигнала в различных средах. Хранящаяся в ЗУ 10 информация поступает на вход микроконтроллера 11, где обрабатывается информация о параметрах вибрации грунта, принимается решение о наличии или отсутствии в зоне поиска объекта поиска 16 и вычисляются координаты положения объекта поиска 16. Далее полученная информация поступает на информационный порт ЭВМ 12, где при помощи специализированного программного обеспечения на экране монитора обеспечивается индикация местоположения объекта поиска в удобном виде для оператора поисковой установки.
Практически работа с аппаратурой осуществляется следующим образом. В процессе работы устройство передвигают с остановками с определенным шагом, равным зоне облучения радара (например, 10÷20 м). При остановке опорную плиту 15 с источником сейсмоакустического сигнала 14 с определенным усилием вдавливают в грунт, включают питание генератора опорного акустического сигнала 13.
Варьируя параметры P1, τ, f и F, получают оптимальные информационные характеристики Δφ, m и r для идентификации объектов поиска.
Для определения наличия или отсутствия объекта поиска в зоне облучения полученные информационные характеристики используют для обучения бортового нейрокомпьютера, состоящего из ЗУ, микроконтроллера и ЭВМ, с помощью специализированного программного обеспечения [Ф.Уоссермен. Нейрокомпьютерная техника: Теория и практика./Пер. с англ. - М.: Мир, 1992, 240 с.].
При наличии в зоне облучения объекта поиска 16, например отдельной мины или минного поля, на индикаторе (т.е. на экране монитора) отмечается факт обнаружения объекта. Если объект поиска не обнаружен, то носитель поисковой установки передвигается на дистанцию R, равную зоне облучения радара, после чего цикл обследования следующей зоны поиска повторяется.
Дадим численную оценку величины фазового сдвига несущей отраженного радиолокационного сигнала Δφ и величины смещения корпуса объекта r, пользуясь соотношениями (7) и (5) соответственно.
Пусть энергия удара равна 10 кгм, что соответствует его эквивалентной силе:  Прочие параметры: f=1 ГГц; λ=0,3 м; D=10 м; Rи=0,1 м; S=0,002 м2; m=0,3 кг; Q=1; τ=0,001 с. Взятая за основу расчета масса объекта m, равная 0,3 кг, соответствует массе противопехотной мины. Подстановка этих значений в выражения (5) и (7) соответственно дает r=20 м и Δφ≈2,4°. На рабочей частоте радиолокатора f=10 ГГц, величина сдвига фаз составляет Δφ=24°.
Прочие параметры: f=1 ГГц; λ=0,3 м; D=10 м; Rи=0,1 м; S=0,002 м2; m=0,3 кг; Q=1; τ=0,001 с. Взятая за основу расчета масса объекта m, равная 0,3 кг, соответствует массе противопехотной мины. Подстановка этих значений в выражения (5) и (7) соответственно дает r=20 м и Δφ≈2,4°. На рабочей частоте радиолокатора f=10 ГГц, величина сдвига фаз составляет Δφ=24°.
Рассчитанные значения r и Δφ указывают на возможность практической реализации предлагаемого способа поиска, при этом техника фазовых измерений на сегодняшний день позволяет регистрировать сдвиг фаз не менее 0,1°. В сейсморазведке сегодня широко используют невзрывные источники как непрерывных, так и импульсных акустических волн с силой единичного удара до 100000 кг и более [Шнеерсон М.Б. и др. Теория и практика наземной невзрывной сейсморазведки. - M.: Недра, 1998 г.], т.о., создание сравнительно маломощных негабаритных невзрывных источников на силу удара 1000-10000 кг реально.
Таким образом, предложенный способ поиска объектов искусственного происхождения (например, мин) в земле в отличие от прототипа обеспечивает возможность дистанционного определения наличия или отсутствия объекта поиска в зоне облучения с указанием координат местоположения объекта поиска с высокой точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОИСКА МИН И МИННЫХ ПОЛЕЙ НА ОСНОВЕ РАДИОЛОКАЦИОННОГО ПАРАМЕТРИЧЕСКОГО МЕТОДА | 2018 |
|
RU2681271C1 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЯ ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО ГЕОФИЗИЧЕСКОГО СУДНА | 2010 |
|
RU2424538C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ПОДПОВЕРХНОСТНЫХ ОБЪЕКТОВ | 2019 |
|
RU2739023C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2037848C1 |
| СПОСОБ ДАЛЬНЕГО ОБНАРУЖЕНИЯ И ОТПУГИВАНИЯ КИТОВ ОТ СКОРОСТНЫХ ПАССАЖИРСКИХ СУДОВ | 2007 |
|
RU2342680C2 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ ВЕЩЕСТВА | 2013 |
|
RU2526594C1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2010 |
|
RU2456644C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2039368C1 |
| СПОСОБ ГЕОФИЗИЧЕСКОЙ КОМПЛЕКСНОЙ РАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2022301C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ МОРЕПЛАВАНИЯ СУДОВ С БОЛЬШОЙ ОСАДКОЙ И ВОДОИЗМЕЩЕНИЕМ | 2007 |
|
RU2342681C2 |
Изобретение относится к радиолокации и сейсмоакустике и может быть использовано для поиска объектов искусственного происхождения в земле. Сущность: возбуждают зондирующие радиолокационные сигналы на частоте механического резонанса объекта поиска F, а также сейсмоакустические сигналы. Принимают радиолокационные эхо-сигналы, выделяют из них полезный сигнал частотой F. Измеряют время группового запаздывания сейсмоакустического сигнала относительно принимаемого радиолокационного эхо-сигнала. Определяют расстояние от поисковой установки до объекта поиска. Измеряют разность фаз первых гармоник принимаемого радиолокационного эхо-сигнала и опорного акустического сигнала. Вычисляют величину поправки расстояния от поисковой установки до объекта поиска. Устройство для осуществления способа содержит источник сейсмоакустического сигнала, воздействующий на опорную плиту, генератор опорного акустического сигнала, радар с передатчиком и приемником, коммутируемую приемопередающую антенну, генератор СВЧ, фазовый детектор, фильтр нижних частот, блок измерения расстояния от поисковой установки до объекта поиска, запоминающее устройство, микроконтроллер и ЭВМ. Причем блок измерения расстояния от поисковой установки до объекта поиска состоит из блока измерения времени группового запаздывания сейсмоакустического сигнала относительно принимаемого радиолокационного эхо-сигнала и блока измерения разности фаз первых гармоник принимаемого радиолокационного эхо-сигнала и опорного акустического сигнала. Технический результат: повышение чувствительности поисков, повышение производительности поисковой установки. 2 н.п. ф-лы, 2 ил.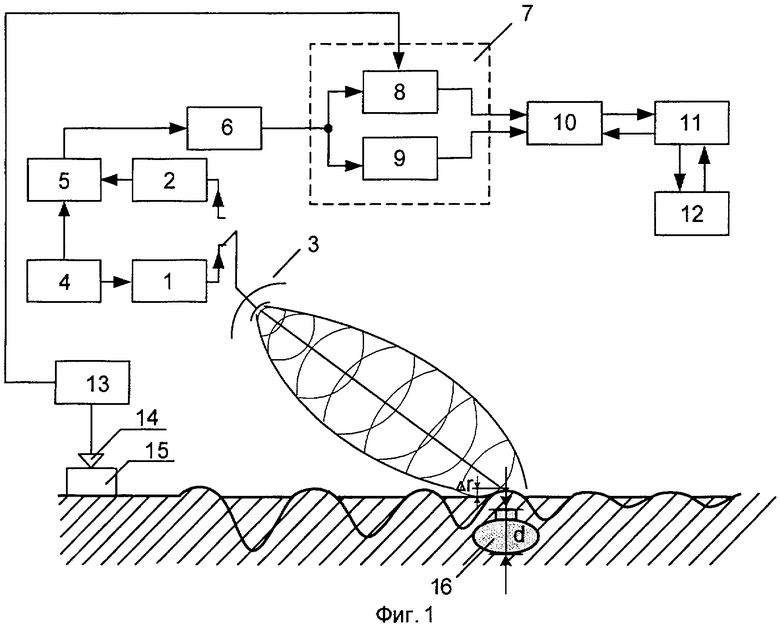
1. Способ поиска объектов искусственного происхождения в земле, основанный на возбуждении сейсмоакустических и зондирующих радиолокационных сигналов, отличающийся тем, что сейсмоакустические сигналы возбуждают на частоте механического резонанса объекта поиска F, осуществляют прием радиолокационных эхо-сигналов, выделяют из принимаемых радиолокационных эхо-сигналов полезный сигнал частотой F, измеряют время группового запаздывания сейсмоакустического сигнала относительно принимаемого радиолокационного эхо-сигнала tгр, определяют расстояние от поисковой установки до объекта поиска по соотношению:
D=υзв·tгр,
где υзв - скорость распространения сейсмоакустического сигнала в грунте, измеряют разность фаз первых гармоник принимаемого радиолокационного эхо-сигнала и опорного акустического сигнала Δφак(Ω), вычисляют величину поправки расстояния от поисковой установки до объекта поиска по соотношению:
ΔD=Δφак(Ω)·λак/2·π,
где λак - длина волны опорного акустического сигнала.
2. Устройство для поиска объектов искусственного происхождения в земле, содержащее радар с передатчиком и приемником, коммутируемую приемопередающую антенну, а также последовательно соединенные запоминающее устройство, микроконтроллер и ЭВМ, отличающееся тем, что дополнительно снабжено генератором СВЧ, первый выход которого подключен к входу передатчика, а второй выход - ко второму входу фазового детектора, выход которого соединен с входом фильтра нижних частот, при этом к первому входу фазового детектора подключен приемник, блоком измерения расстояния от поисковой установки до объекта поиска, состоящим из блока измерения времени группового запаздывания сейсмоакустического сигнала относительно принимаемого радиолокационного эхо-сигнала, выход которого соединен с вторым входом запоминающего устройства, и блока измерения разности фаз первых гармоник принимаемого радиолокационного эхо-сигнала и опорного акустического сигнала, выход которого соединен с первым входом запоминающего устройства, при этом вход блока измерения расстояния от поисковой установки до объекта поиска соединен с выходом фильтра нижних частот, а также генератором опорного акустического сигнала, первый выход которого соединен с источником сейсмоакустического сигнала, воздействующим на опорную плиту, а второй выход - со вторым входом блока измерения разности фаз первых гармоник принимаемого радиолокационного эхо-сигнала и опорного акустического сигнала.
| JP 11006877 А, 12.01.1999 | |||
| ГЕОФИЗИЧЕСКИЙ КОМПЛЕКС ДЛЯ ПОИСКА ПОДПОВЕРХНОСТНЫХ ОБЪЕКТОВ "ГФК-1" | 2005 |
|
RU2283519C1 |
| СПОСОБ ГЕОФИЗИЧЕСКОЙ КОМПЛЕКСНОЙ РАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2022301C1 |

