Изобретение относится к электронной технике и может быть использовано для ввода информации в ЭВМ.
Необходимость использования дополнительного (к клавиатуре) устройства управления курсором в ЭВМ возникает в тех случаях, когда требуется обеспечить возможность быстрого перемещения курсора по экрану в сочетании с удобством его точного позиционирования. Данные требования предъявляются, например, при работе с графической информацией или использовании разветвленных систем меню. В принципе эти операции могут быть выполнены с помощью клавиатуры путем нажатия клавиш перемещения курсора, однако при этом, во-первых, возможны только фиксированные направления перемещения с интервалом 45о, и во-вторых, необходимо непроизводительное многократное нажатие названных клавиш, требующее значительных затрат времени. В связи с этим использование клавиатуры оказывается весьма малоэффективным, и для выполнения рассматриваемых операций, как правило, используются дополнительные устройства управления курсором. Так, в настоящее время около 80% прикладных программ предусматривают использование "мыши".
Наиболее существенными требованиями, предъявляемыми к дополнительным устройствам управления курсором, являются возможность быстрого перемещения курсора, удобство его точного позиционирования, высокая надежность, минимальные габариты и вес, минимальная стоимость, достаточность применения только одного дополнительного устройства совместно с клавиатурой.
Наиболее распространенными типами устройств управления курсором являются "мышь", координатный шар, джойстик, планшет и световое перо. Однако ни одно из них не удовлетворяет сформулированным требованиям в достаточной степени.
Основным недостатком "мыши" - самого распространенного благодаря своим относительно небольшим габаритам, весу и стоимости устройства - является неудобство точного позиционирования курсора. Смещению курсора на одну точку соответствует очень малое смещение "мыши" (0,12 мм при стандартном разрешении 200 точек на дюйм), которое трудно обеспечить движениями руки. Это приводит к большим непроизводительным затратам времени на позиционирование курсора и существенно снижает эффективность использования "мыши". Другим существенным недостатком является необходимость свободной площадки для работы с "мышью", что практически исключает ее применение в переносных компьютерах. Отметим также недостаточную надежность "мыши", связанную с чувствительностью к попаданию пыли в механическую часть.
Координатный шар и джойстик имеют стоимость порядка стоимости "мыши" и не нуждаются в свободной площадке, однако имеют значительные габариты, вес и требуют существенных физических действий оператора для перемещения курсора, что также исключает их применение в переносных компьютерах.
Планшет и световое перо позволяют легко и быстро позиционировать курсор, однако имеют большую стоимость, габариты и вес, в связи с чем также не могут быть использованы в переносных компьютерах.
Таким образом, в связи с наличием существенных недостатков у известных устройств актуальна разработка и создание нового устройства управления курсором, в большей степени соответствующего предъявляемым требованиям.
Наиболее близким по техническому решению к изобретению является устройство управления курсором, состоящее из механической части для приложения управляющего усилия оператора и преобразующей части для преобразования этого усилия в электрический сигнал, определяющий направление и скорость перемещения курсора. Механическая часть устройства включает в себя дискообразную плоскую структуру, закрепленную так, что возможны ее качания относительно центральной точки, и механически соединенную с жестким стержнем, связанным, в свою очередь, с плоским упругим элементом, создающим возвращающую силу. Преобразующая часть содержит четыре попарно-ортогонально расположенных на упругом элементе датчика, чувствительных к деформации. При нажатии оператора на пластину усилие через стержень передается на упругий элемент, который деформируется. При этом изменяется электрическое сопротивление датчиков, что регистрируется электронной схемой и используется при формировании сигнала, определяющего направление и скорость перемещения курсора.
Основные недостатки прототипа. Использование в качестве датчиков элементов, изменяющих при деформации электрическое сопротивление (тензорезисторов), приводит к необходимости тщательной балансировки сопротивлений для установки нулевой скорости курсора в отсутствие управляющего усилия. В процессе эксплуатации с течением времени, а также под воздействием различных внешних факторов (например, изменений температуры) баланс сопротивлений может нарушиться, что ведет к самопроизвольному дрейфу курсора. Таким образом, прототип не обеспечивает стабильности работы в течение длительного времени и в различных внешних условиях. Для перемещения курсора оператор производит надавливание на плоский диск по ноpмали к его поверхности, при этом направление перемещения определяется местом надавливания. Соответственно для изменения направления движения курсора оператор вынужден оторвать пальцы от устройства и переместить их на другое место. Эта манипуляция требует затрат времени и отвлечения внимания оператора от экрана. Таким образом, прототип не обеспечивает достаточного удобства управления курсором для оператора. Во всех предложенных реализациях механическая нагрузка оказывается приложенной к верхней панели устройства, обычно выполняющей декоративные функции и не являющейся частью силового каркаса. Таким образом, конструкция прототипа требует механического усилия верхней панели, что приводит к увеличению габаритов, веса и стоимости устройства.
Целью изобретения является повышение эффективности управления курсором за счет сочетания возможности быстрого перемещения курсора с удобством его точного позиционирования, а также одновременное существенное повышение надежности, снижение габаритов, веса и стоимости устройства
Цель достигается тем, что устройство, содержащее корпус, возвратный упругий элемент, чувствительный к деформации датчик, формирователь управляющих сигналов и кабель связи с ЭВМ, дополнительно содержит клавиши, при этом возвратный упругий элемент выполнен в виде полого цилиндра, один его конец жестко закреплен на основании корпуса, а другой конец выполнен в виде головки округлой фоpмы, выходящей в отверстие в верхней панели корпуса, датчик выполнен в виде полого пьезокерамического цилиндра с нанесенными на внешней стороне вдоль образующих четырьмя металлическими контактами и механически соединен с возвратным упругим элементом, причем датчик и клавиши электрически связаны с формирователем управляющих сигналов, формирующим выходной сигнал.
Цель достигается также тем, что клавиши закреплены на основании корпуса так, что они расположены в соответствующих отверстиях головки.
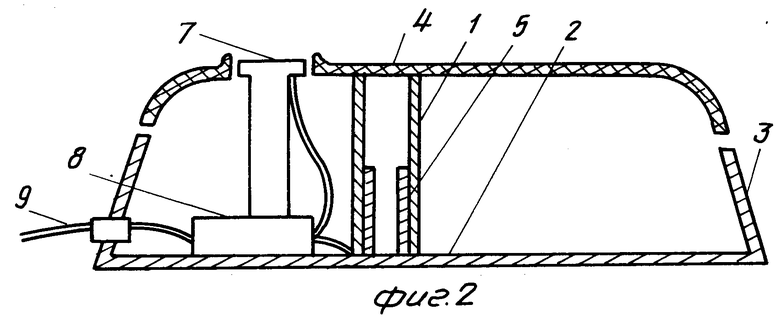
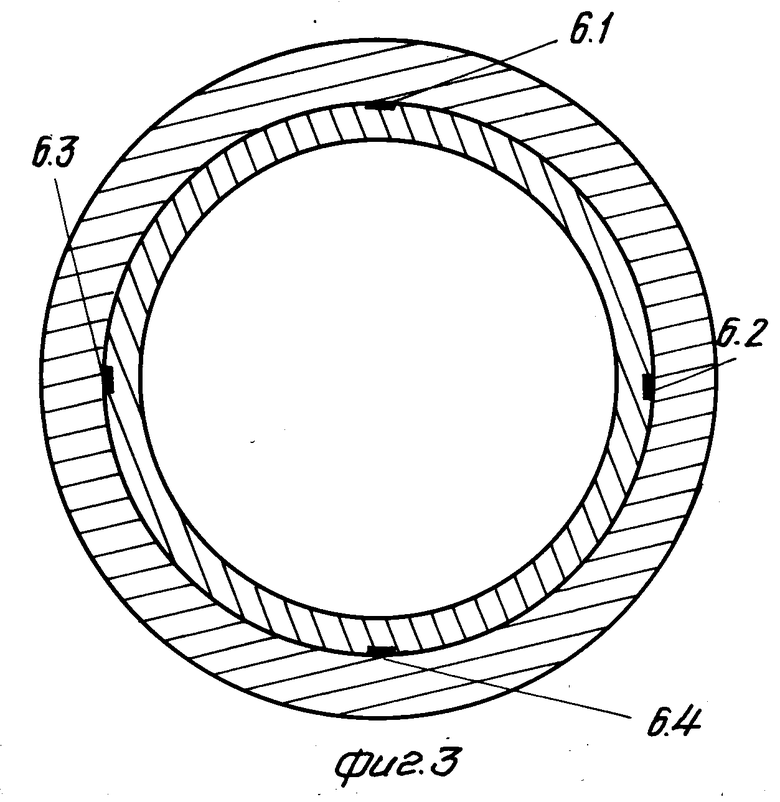
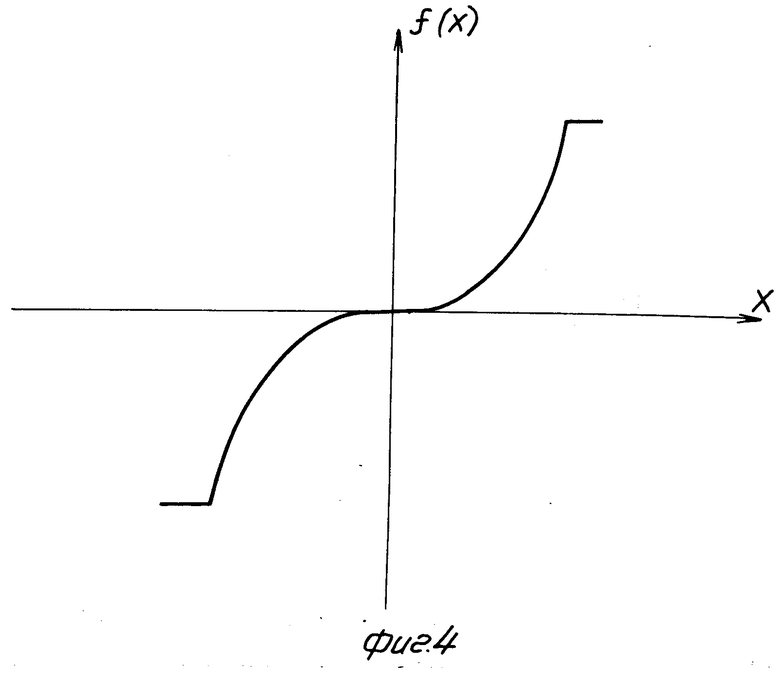
На фиг. 1 и 2 изображено устройство ввода в двух возможных реализациях в разрезе; на фиг. 3 показаны возвратный упругий элемент и датчик, поперечное сечение; на фиг. 4 - типичный вид характеристики нелинейного преобразования сигнала f(x) в формирователе управляющих сигналов.
Устройство ввода содержит возвратный упругий элемент 1 (фиг. 1), представляющий собой полый цилиндр, одним концом жестко закрепленный на основании 2 корпуса 3, при этом другой его конец заканчивается головкой 4 округлой формы, выходящей в отверстие в верхней панели корпуса. Датчик 5, представляющий собой полый пьезокерамический цилиндр с нанесенными на внешней стороне вдоль образующих через углы 90о четырьмя металлическими полосками, выполняющими функции контактов 6, механически соединен с возвратным упругим элементом 1. Датчик 5 и две или три закрепленные на корпусе 3 клавиши 7 электрически связаны с формирователем 8 управляющих сигналов, формирующим выходные сигналы, которые поступают в ЭВМ через кабель 9 связи.
Другая возможная реализация устройства (фиг. 2), отличается тем, что клавиши закреплены на основании 2 корпуса 3 так, что оказываются расположенными в соответствующих отверстиях головки 4 и слегка выступают над ее поверхностью.
Устройство работает следующим образом.
Для управления перемещением курсора к головке 4 оператором прикладывается некоторое усилие, имеющее составляющую в плоскости нормали к оси возвратного упругого элемента. Приложенное усилие вызывает деформацию возвратного упругого элемента 1 и пьезоэлектрического датчика 5. Вследствие этого на контактах 6 последнего появляются электрические потенциалы, причем в линейном приближении разности потенциалов двух контактов, расположенных напротив друг друга (контакты 6.1 и 6.3 или контакты 6.2 и 6.4 на фиг. 3), прямо пропорциональна соответствующему моменту приложенной к головке 4 силы ( Мх или My) относительно точки закрепления возвратного упругого элемента 1 на основании. Сигналы со всех четырех контактов 6 датчика 5 поступают на формирователь 8 управляющих сигналов, где происходит их преобразование, включающее выделение сигналов, пропорциональных Мх и My, и нелинейное преобразование данных сигналов вида f(Мх), f(My) (типичный вид характеристики нелинейного преобразования f(x) показан на фиг. 4). Последние используются при формировании выходного сигнала так, что скорость перемещения курсора по координате Х или Y оказывается пропорциональной величине сигнала f(Mx) и f(My) соответственно.
Выбранный вид характеристики нелинейного преобразования связан с необходимостью обеспечить как медленное и плавное перемещение курсора при точном позиционировании (что достигается при малой величине управляющих усилий), так и быстрое его перемещение (что достигается за счет быстрого роста скорости при увеличении управляющего усилия при средних и больших значениях последнего).
Клавиши 7 выполняют функции, непосредственно не связанные с перемещением курсора, однако позволяющие оператору в процессе работы не перемещать руку по устройству, как и в известном манипуляторе "мышь"
Использование пьезоэлемента в качестве чувствительного к деформации датчика обеспечивает отсутствие самопроизвольного дрейфа курсора за счет нулевой разности потенциалов на недеформированном датчике. Не возникает необходимости в тщательной балансировке устройства. Становится возможным отказаться от механически подвижных элементов в конструкции и тем самым повысить надежность, снизить вес и стоимость устройства. Использование горизонтальной составляющей силы надавливания на округлую головку в качестве управляющего воздействия позволяет легко задавать и изменять направление и скорость перемещения курсора, не отвлекая внимания оператора от экрана.
Введение нелинейного преобразования при формировании сигнала управления курсором позволяет легко позиционировать курсор в заданную точку при малых управляющих усилиях и в то же время быстро перемещать его при увеличении управляющих усилий. Сочетание названных возможностей позволяет значительно увеличить эффективность использования устройства управления курсором.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ КУРСОРОМ | 2004 |
|
RU2290683C2 |
| СПОСОБ УПРАВЛЕНИЯ КУРСОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2275674C2 |
| УСТРОЙСТВО ЭРГОНОМИЧЕСКОЙ КЛАВИАТУРЫ | 2005 |
|
RU2293367C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ КУРСОРА НА ЭКРАНЕ ДИСПЛЕЯ | 1993 |
|
RU2042208C1 |
| УСТРОЙСТВО С ЭЛЕКТРОПРИВОДОМ ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2007 |
|
RU2344863C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 2003 |
|
RU2266768C2 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2008 |
|
RU2378030C1 |
| КОМПЬЮТЕРНАЯ МЫШЬ НА МАГНИТЕ | 2015 |
|
RU2604860C2 |
| УПРАВЛЯЮЩИЙ ЭЛЕМЕНТ ДЛЯ ПЕРСОНАЛЬНОГО КОМПЬЮТЕРА | 2000 |
|
RU2225998C2 |
| КОМПЛЕКС ДЛЯ ПРОФИЛАКТИКИ И ЛЕЧЕНИЯ БЛИЗОРУКОСТИ "ОКО" | 1990 |
|
RU2040910C1 |
Использование: электронная техника, ввод информации в ЭВМ управление курсором дисплея. Устройство содержит возвратный упругий элемент 1 в форме полого цилиндра, одним концом закрепленного на основании 2 корпуса 3, а другим концом заканчивающегося головкой 4, расположенной в отверстии корпуса, датчик 5, выполненный в форме полого пьезокерамического цилиндра с нанесенными на него металлическими контактами 6 установленный внутри полого цилиндра и механически связанный с ним, клавиши 7, закрепленные на корпусе, причем в одном случае они расположены в отверстиях корпуса 3, в другом - в отверстиях головки 4 клавиши 7, и контакты, электрически связанные с формирователем 8 управляющих сигналов. 2 з.п. ф-лы, 4 ил.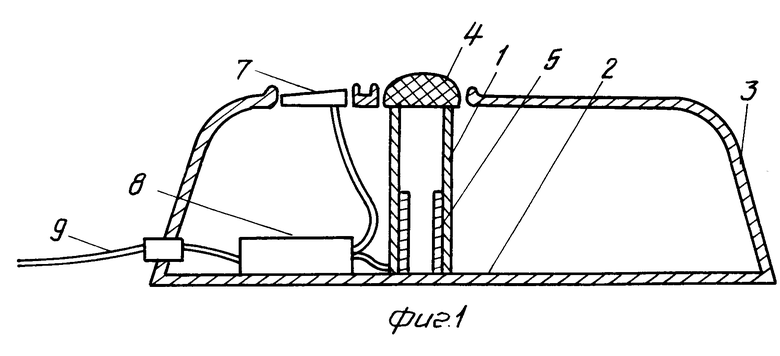
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
