Область техники
Изобретение относится к способам и устройствам управления курсором, отображаемым на дисплее, в частности к способам и устройствам управления курсором при вводе информации в мобильные телефонные аппараты, компьютеры, пульты управления, фото, видео, аудио, бытовые и другие технологические устройства. Изобретение может быть использовано для ввода информации путем управления курсором, отображаемым на дисплее любого компьютеризированного устройства.
Уровень техники
Миниатюрные мобильные телефоны и компьютеры, различные пульты управления стали неотъемлемой компонентой современного быта. Тенденции их развития требуют дальнейшей миниатюризации, упрощения и повышения технологичности производства.
В большинстве случаев, для дальнейшей миниатюризации этих устройств, требуется найти возможность эффективной замены клавиатур, компьютерных манипуляторов типа "мышь", трекболов, джойстиков, сенсорных экранов либо объединения их функций в одном миниатюрном устройстве.
Для мобильных телефонов актуальна проблема эффективной замены клавиатур и создания универсального, миниатюрного и, в то же время, полноценного манипулятора курсором, позволяющего расширить круг функциональных возможностей мобильных устройств при дальнейшей их миниатюризации, облегчить и ускорить ввод символов, цифр, букв и другой информации.
Широко известен способ ввода информации и управления курсором, заключающийся в том, что курсор устройства, отображаемый на дисплее, связывают электронным способом с механическим сенсором (в простейшем случае шариком, снабженным системой датчиков), а затем перемещают рукой это устройство относительно анализируемой неподвижной поверхности.
Патентов на различные варианты механических и оптических компьютерных мышей очень много (См., например, патенты США: 4546347, 4751380, 5355146, 4364035, 4797544, 5497150, 5578813, 4390873, 4794384, 4799055, 4920260, 5089712, 5644139, 5729009, 5786804, 5825044, патент Японии JP 54-126426, Oct., 1979, европатенты ЕР 0081348, Dec., 1981, 0076032, Jun., 1983, ЕР 0146843, Jul., 1985, литературу: "Mouse Tracks Path by Electronics Only" Electronics International, vol. 55 (1982) Oct., No. 21, New York, USA. Lyon, Richard F., "The Optical Mouse And An Architectural Methodology For Smart Digital Sensors", VLSI-81-1, Aug. 1981, а также патенты JP 04096817 A, 30.03.92, DE 4107085 A1, 02.10.91, DE 3900622 A1, 14.09.89, DE 4224024 A1, 04.02.93, FR 2687233 A1, 13.08.93, SU 1674187 A1, 30.08.91, SU 1705816 A1, 15.01.92, RU 2124226 C1, 27.12.98).
Также широко известен способ ввода информации и управления курсором, заключающийся в том, что курсор устройства, отображаемый на дисплее, связывают электронным способом с поверхностью шарика, закрепленного с возможностью вращения относительно неподвижно размещенной системы датчиков (назовем их механическим сенсором), а затем, вращая шарик рукой в нужном направлении, управляют движением курсора. Для реализации этого способа используются широко известные устройства, которые называются трекболами и используются в ноутбуках.
Недостатком трекболов является рост неудобства пользования при уменьшении габаритов шарика. При этом возрастает сложность конструкции трекбола и уменьшается надежность. Поэтому применение трекболов в миниатюрных мобильных устройствах ограничено определенным размерным порогом, дальше которого нет смысла использовать эти устройства. Уменьшение габаритов мобильных телефонов, компьютеров и пультов управления приводит к необходимости разработки концептуально нового способа управления курсором и бесклавишного ввода информации и символов в мобильные телефонные аппараты, компьютеры, пульты управления, фото, видео, аудио, бытовые и другие технологические устройства, а также устройств для осуществления этого способа.
Известны сенсорные дисплеи, используемые для ввода информации в компьютеры, в которых чувствительный элемент расположен на поверхности дисплея или вынесен в отдельное устройство. Промышленностью выпускается множество модификаций устройств с сенсорными экранами различных типов - резистивными, емкостными, оптическими, волновыми и др. сенсорами. В этих устройствах вырабатывается сигнал, соответствующий положению пальца руки или специализированной ручки на экране дисплея при его прикосновении к дисплею. При нажатии пальцем руки или ручкой точки или области экрана, соответствующей какой-либо иконке или символу, данный символ или иконка активизируется, и в компьютер вводится соответствующая информация либо вырабатывается сигнал, соответствующий траектории движения специализированной ручки. По траектории ручки микропроцессор рисует ее след на дисплее.
Существенным отличием способов ввода информации с использованием сенсорных экранов и устройств для их осуществления является то, что в них не используется курсор. При каждом касании такого экрана вырабатывается сигнал, соответствующий точке касания, и сразу же активизируется информация, соответствующая той или иной зоне экрана. Касание экрана в разных местах эквивалентно нажатию на разные кнопки, расположенные в разных местах, но не способу управления курсором. При использовании миниатюрных дисплеев, размеры которых соизмеримы с размерами пальца руки, управление курсором путем перемещения пальца по поверхности сенсорного экрана неудобно. А в дисплеях, размер которых меньше размеров подушечки пальца, этот принцип вообще не применим.
Системы с использованием сенсорных экранов, в которых именно курсор перемещается синхронно с движениями пальца или специализированной ручки по его чувствительной зоне, не известны. Это объясняется тем, что при такой концепции построения системы управления перемещение курсора по экрану просто бессмысленно, так как курсор закрывался бы самим пальцем руки.
Известны способы ввода информации с помощью джойстиков, в том числе довольно миниатюрных, в которых тоже используют перемещения элемента джойстика и пальца, управляющего джойстиком, относительно корпуса устройства.
Известны тензометрические датчики для измерения перемещений и поворотов. Например, по патентам РФ №2019788, кл. G 01 B 7/18, 1994 г., №2051329, 1995, кл. G 01 B 7/16, №97106455, №2126954, 1995, авторским свидетельствам СССР №1241059, кл. G 01 В 7/18, 1986, 332317, кл. G 01 В 7/18, 1970, №868334, кл. G 01 В 7/18, 1979, №1474450, кл. G 01 B 7/18, 1980. Эти устройства содержат тензорезисторы и используются для определения линейного или углового перемещения деталей или поверхностей. Однако они не могут быть использованы в миниатюрных устройствах в силу своих больших габаритов и применения громоздких механических передающих устройств.
Известны пленочные устройства для миниатюрных устройств, управляемые одним пальцем руки, например по патенту США №335860, 2003 г. "Pressing direction sensor and input device using the same". В этом устройстве используется пленочный резистивный датчик, который выдает сигнал, показывающий направление движения курсора на дисплее. Датчик содержит кольцо из пленки резистивного материала, сопротивление которого зависит от места нажатия на него. Пальцем руки следует нажать в том месте датчика, куда должен двигаться курсор. Однако в этом датчике не вырабатывается сигнал, указывающий с какой скоростью должен двигаться курсор в данном направлении, а сами устройства должны превышать размер пальца хотя бы в два-три раза. Чтобы было удобно пользоваться этим устройством людям, имеющим пальцы диаметром 1,5-2 см, размеры датчика должны превышать размер самого устройства. Это негативно отражается на компоновке миниатюрного устройства. При уменьшении размеров датчика возрастает неудобство его использования. Для управления датчиком необходимо перемещение пальца руки по поверхности датчика.
Обобщая обзор по известным способам и устройствам управления курсором и ввода информации в компьютеризированные приборы, можно сделать следующий вывод.
В компьютерных манипуляторах типа мышь, трекбол и джойстик курсор устройства либо набор символов перемещается на дисплее синхронно с относительными перемещениями сенсора и анализируемой поверхности либо перемещениями сенсора и руки, либо перемещениями пальца по сенсору. Это не всегда удобно. Для мыши требуется внешняя поверхность. Трекболы нельзя сделать миниатюрными. У тех и других при перемещении курсора на большие расстояния, например, при прокрутке многостраничного списка или документа требуется делать несколько движений.
Джойстики требуют применения сложных передающих устройств, которые тоже препятствуют миниатюризации и повышению надежности. При необходимости совершить быстрый возврат у джойстика требуется совершить обратное движение через нулевое положение, что снижает оперативность управления. То есть все способы управления, связанные с перемещением чувствительного органа, относятся к устройствам, возможности которых по миниатюризации уже исчерпаны. Это обуславливает актуальность разработки и внедрения принципиально нового способа управления курсором и ввода информации, где движение в процессе управления принципиально отсутствует.
Известен аналоговый датчик, управляемый единственным (отдельным) человеческим пальцем/большим пальцем по патенту США "Analog sensor(s) with tactile feedback" Brad A. Armstrong, Serial No.:437395, Series Code: 10, Filed: May 12, 2003.
В указанном патенте раскрыт аналоговый датчик, управляемый одним пальцем. Усилие нажатия прикладывается к вершине датчика, структура которого способна выдавать выходной аналоговый сигнал, зависящий от изменяющейся силы, приложенной пальцем. Сила нажатия заставляет вершину датчика отклоняться вниз, проходя через пользовательский порог, создавая осязательные ощущения. Аналоговый датчик может комбинироваться с дополнительными датчиками и осязательными структурами обратной связи, например датчиками типа вращающихся потенциометров и осязательной структуры обратной связи, содержащей электродвигатель.
В этом изобретении используется упругий элемент в виде мембраны, соединенной с вращающимися потенциометрами сопротивления, и отклоняющаяся от центрального или первоначального положения ручка или вершина датчика, на которую воздействуют одним пальцем.
Отклонение вершины датчика от центрального положения не всегда приемлемо. В системах управления, где требуется высокая оперативность команд, такая схема снижает оперативность управления. Оператору требуется время для возврата датчика в исходное нулевое положение, и только после этого он сможет сгенерировать сигнал для движения в обратную сторону. Сильно изгибающиеся, передающие или перемещающиеся части датчика всегда отрицательно влияют на его надежность и точность.
В датчике по патенту 437395 применяется механическая система передачи движения отклонения вершины датчика к потенциометрам вращения, вырабатывающим управляющий или выходной сигнал. Подобное решение негативно влияет на миниатюрность и надежность устройства.
Надежнее использовать неподвижный, не отклоняющийся, но высокочувствительный элемент, в котором сила действия в соответствии с известным законом Ньютона всегда равна силе противодействия. Это позволит обойтись без механизмов "осязательной обратной связи". При этом оперативность управления с использованием такого датчика будет всегда на пределе человеческих возможностей.
Таким образом, во всех известных способах и устройствах присутствует перемещение с манипулятором либо руки, либо пальца. Такие управляющие устройства позволяют вводить информацию, но в некоторых приложениях они недостаточно удобны, так как требуют осуществлять реальные движения рукой или пальцем, что не всегда удобно и приемлемо, например, в условиях перегрузки или вибрации, в условиях длительной работы и т.п.
Применения движущихся или сильно деформирующихся конструктивных элементов в устройствах управления снижает их надежность. В некоторых случаях такие системы обладают недостаточной оперативностью управления, так как требуют потери времени на перемещение управляющего элемента, что может быть неудобно, например, в увлекательных компьютерных играх, требующих быстрой реакции или при необходимости быстро набрать номер телефона.
Наиболее близким к заявляемому изобретению (прототипом) является устройство для ввода информации, описанное в патенте US 5790102, опубликованное 04.08.1998, G 09 G 5/08, 24 л., (Д1), в котором используется способ управления курсором, при котором отображаемый на дисплее курсор, управляемый с помощью манипулятора рукой пользователя, связывают с датчиком манипулятора путем преобразования сигналов датчика манипулятора в цифровой код, передачи этого кода в микропроцессор и преобразования в нем этого кода в движение курсора, отображаемого на дисплее, причем для управления движением курсора, отображаемого на дисплее, нажимают на датчик манипулятора без его перемещения в направлении желаемого перемещения курсора и прекращают нажатие при необходимости остановки курсора. В этом способе преобразование нажатия в сигнал датчика осуществляется с помощью упруго деформируемого элемента и конструктивно сложных и нетехнологичных электромеханических устройств. Поэтому устройство получается громоздким и нетехнологичным. Кроме того, оно не позволяет осуществлять вращения курсора, что необходимо во множестве приложений.
Таким образом, все известные способы управления курсором, связанные с перемещением чувствительного органа, относятся к устройствам, эксплуатационные возможности которых уже исчерпаны.
Вышеуказанное обуславливает актуальность создания способа и устройства управления курсором, отображаемым на дисплее, который позволяет осуществлять не только перемещение, но и вращение курсора.
Сущность изобретения
Заявляемое изобретение решает задачу создания способа и устройства управления курсором, отображаемым на дисплее, обеспечивающего возможность расширения эксплуатационных возможностей устройств ввода путем осуществления возможности не только перемещения, но и вращения курсора, упрощения конструкции и повышения технологичности и надежности.
Решение поставленной задачи и достижение технического результата при использовании изобретения обеспечивает способ управления курсором, отображаемым на дисплее устройства, содержащего по меньшей мере корпус, манипулятор, микропроцессор для управления курсором и по меньшей мере один датчик манипулятора, заключающийся в том, что отображаемый на дисплее курсор, управляемый с помощью манипулятора рукой пользователя, связывают с датчиком манипулятора путем преобразования сигналов датчика манипулятора в цифровой код, передачи этого кода в микропроцессор и преобразования в нем этого кода в движение курсора, отображаемого на дисплее, а для управления движением курсора прикладывают силовое воздействие к манипулятору в направлении желаемого перемещения курсора и прекращают силовое воздействие при необходимости остановки курсора, причем силовое воздействие, приложенное к манипулятору, передают на упруго деформируемый элемент и вырабатывают сигналы для микропроцессора, управляющего курсором, посредством датчика манипулятора, соединенного с упруго деформируемым элементом, отличающийся тем, что для осуществления возможности не только перемещения но и вращения курсора, отображаемого на дисплее, на упруго деформируемом элементе датчика размещают тензорезисторы, так чтобы их длинные базовые оси симметрии располагались радиально от центра датчика в разных направлениях и были наклонены относительно радиального направления, проведенного от центра датчика к центру тензорезистора, на угол тангенциального наклона сi, а для осуществления вращения курсора прикладывают вращающий момент в нужном направлении к манипулятору и прекращают приложение вращающего момента при необходимости остановки курсора.
Кроме того, скорость вращения курсора изменяют путем изменения величины вращающего момента, приложенного к манипулятору.
Кроме того, изменяют направление вращения курсора путем изменения направления вращающего момента, приложенного к манипулятору.
Кроме того, направление и скорость вращения курсора в плоскости координат определяют по знакам и величинам тангенциальной составляющей электрических сигналов тензорезисторов манипулятора, для чего микропроцессором анализируются знаки электрических сигналов всех тензорезисторов и, если они все одинаковы, вычисляется скорость вращения курсора по формуле

где i - номер тензорезистора манипулятора;
Wkurs - скорость вращения курсора, при Wkurs>0 направление вращения соответствует вращению в заранее определенную сторону, например по углу тангенциального наклона тензорезисторов манипулятора или по часовой стрелке, а при Wkurs<0 направление вращения противоположно предыдущему направлению вращения;
Wi=Ri·Ft(ci) - тангенциальный сигнал i-го тензорезистора манипулятора; (2)
Ri - измеренный электрический сигнал i-го тензорезистора манипулятора, причем Ri=0 соответствует отсутствию управляющего сигнала, Ri>0 - сжатию, а Ri<0 - растяжению или наоборот,
сi - угол тангенциального наклона i-го тензорезистора манипулятора,
Ft(ci) - тригонометрическая (sin, cos) функция, в зависимости от конструктивного исполнения устройства;
F(Wi) - задаваемая функциональная зависимость скорости вращения от тангенциальной деформации тензорезисторов манипулятора;
Kw - масштабный коэффициент.
Кроме того, для определения направления и скорости перемещения курсора по дисплею вначале разлагают силу, приложенную пальцами руки к датчику манипулятора, на составляющие компонентные вектора с заранее известными фиксированными направлениями, затем измеряют величины компонентных векторов разложения силы путем измерения электрических сигналов с тензорезисторов, установленных в этих направлениях, после чего вычисляют углы между проекциями вектора силы, приложенной к манипулятору, и осями координат манипулятора по формулам

где aj - вычисленный угол направления силы, приложенной к манипулятору;
j - номер оси координат манипулятора, например X1 - первая ось координат, например, связанная с вертикальной осью координат на плоском дисплее, Х2 - вторая ось координат, например, связанная с горизонтальной осью координат на плоском дисплее;
Uj=Sum(Uij) - сумма проекций векторов разложений силы, приложенной к датчику манипулятора на j-ю ось координат;
Uij=Ri·Ftj(bij) - величина проекции i-го вектора разложения силы, приложенной к датчику манипулятора на j-ю ось координат;
Ri - измеренный электрический сигнал i-го тензорезистора манипулятора;
bi - известный угол между одной из осей координат манипулятора, например между осью координат X1, связанной с вертикальной осью на плоском дисплее, и i-м тензорезистором манипулятора в плоскости осей координат Х1Х2;
Ftj(bij) - тригонометрическая (sin, cos) функция, в зависимости от конструктивного исполнения устройства;
после чего вычисляют приращения перемещения курсора на дисплее путем сложения векторов

где Ukurs - скорость перемещения курсора, определяется по формуле

Ftj(aij) - тригонометрическая (sin, cos) функция, в зависимости от конструктивного исполнения устройства;
где Kj - согласующие масштабные коэффициенты.
Кроме того, направления длинных осей симметрии тензорезисторов совмещают с осями координат манипулятора, а приращения перемещений курсора на дисплее вычисляют по формуле

Кроме того, суммы проекций векторов разложений силы на оси координат Uj вычисляют, суммируя только отрицательные или только положительные величины проекций каждого вектора разложения силы на оси координат.
Кроме того, направление и скорость вращения курсора вокруг осей координат определяют по знакам и величинам Uj - сумм проекций векторов разложений на соответствующую ось координат силы, приложенной к манипулятору, для чего вычисляют величины Uj по формулам п.5 и умножают их на соответствующие масштабные коэффициенты.
Кроме того, переходят от режима работы, когда сигналы от тензорезисторов манипулятора интерпретируют как сигналы для перемещения курсора по дисплею, к режиму работы, когда сигналы от тензорезисторов манипулятора интерпретируют как сигналы для вращения курсора в плоскости нажатия на датчик манипулятора, и обратно путем подачи специальных команд микропроцессору на соответствующую обработку сигналов, поступающих от тензорезисторов манипулятора.
Кроме того, для активизации курсора или смены режима работы устройства кратковременно нажимают на манипулятор в направлении сверху вниз и анализируют значения сигналов со всех тензорезисторов манипулятора в момент, когда все сигналы становятся одного знака, вырабатывают первый дополнительный сигнал, а в момент, когда знак сигнала по меньшей мере одного тензорезистора манипулятора становится отличным от знаков других тензорезисторов манипулятора, вырабатывают второй дополнительный сигнал.
Кроме того, в устройство вводят датчик температуры, а в память микропроцессора вводят зависимость сопротивления тензорезисторов от температуры, при помощи которой, используя сигналы датчика температуры, вычисляют величины сигналов, возникающих от воздействия изменяющейся температуры на тензорезисторы, и отнимают их от сигналов, поступающих от реального устройства.
Решение поставленной задачи и достижение технического результата при использовании изобретения обеспечивает также устройство управления курсором, содержащее размещенные в корпусе манипулятор, по меньшей мере один датчик манипулятора, соединенный с микропроцессором с помощью шин и средств передачи данных, дисплей с отображаемым на нем курсором, отличающееся тем, что датчик манипулятора содержит по меньшей мере один тензорезистор, расположенный на упруго деформируемом элементе, который механически связан с манипулятором, причем манипулятор выполнен в виде стержня, один конец которого закреплен на упруго деформируемом элементе датчика, а длинная базовая ось симметрии тензорезистора направлена радиально от места закрепления стержня.
Кроме того, свободный конец манипулятора снабжен головкой, выполненной в виде выпуклой или вогнутой полусферы или полуовала, или вогнутости по форме пальца руки.
Кроме того, упруго деформируемый элемент выполнен в виде плоской, конической, выпуклой, вогнутой или цилиндрической сплошной или полой детали.
Кроме того, длинная базовая ось симметрии тензорезистора, размещенного на упруго деформируемом элементе, наклонена относительно радиального направления, проведенного от центра датчика к центру тензорезистора, на угол тангенциального наклона сi.
Кроме того, датчик манипулятора содержит по меньшей мере два тензорезистора, расположенные на упруго деформируемом элементе, так чтобы их длинные базовые оси симметрии были направлены радиально от центра датчика в разных направлениях.
Кроме того, тензорезисторы расположены на внешней или внутренней поверхности упруго деформируемого элемента параллельно его оси или перпендикулярно, или радиально, или тангенциально, или по винтовой линии, или под иным углом к оси симметрии упруго деформируемого элемента или к радиусу, проведенному к его центру или к общему центру тензорезисторов.
Кроме того, устройство содержит электронный коммутатор и аналого-цифровой преобразователь, или только аналого-цифровые преобразователи по количеству тензорезисторов, соединенные с тензорезисторами и с микропроцессором.
Кроме того, устройство содержит дополнительный элемент, чувствительный к нажатию, расположенный под упруго деформируемым элементом.
Кроме того, устройство содержит датчик температуры, соединенный с микропроцессором, и зависимость сопротивления тензорезисторов от температуры, хранимую в памяти микропроцессора.
Кроме того, устройство содержит термокомпенсирующие резисторы или тензорезисторы, соединенные с тензорезисторами датчика по мостовой или иной компенсирующей схеме.
Кроме того, манипулятор и элемент, чувствительный к нажатию, размещены на корпусе устройства, так чтобы они были направлены к управляющему пальцу руки пользователя.
Краткое описание чертежей
На фиг.1 показаны вид спереди и продольный разрез мобильного телефона, выполненного в соответствии с изобретением.
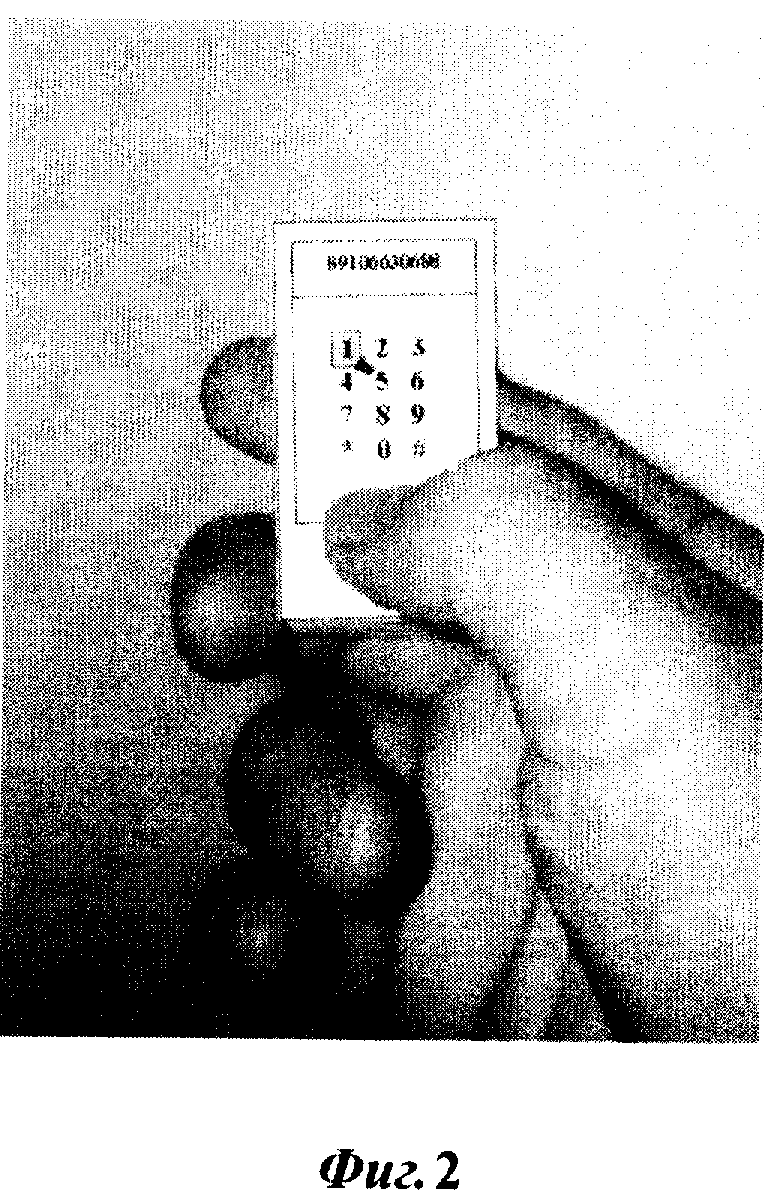
На фиг.2 показано размещение в руке пользователя мобильного устройства, выполненного в соответствии с изобретением.
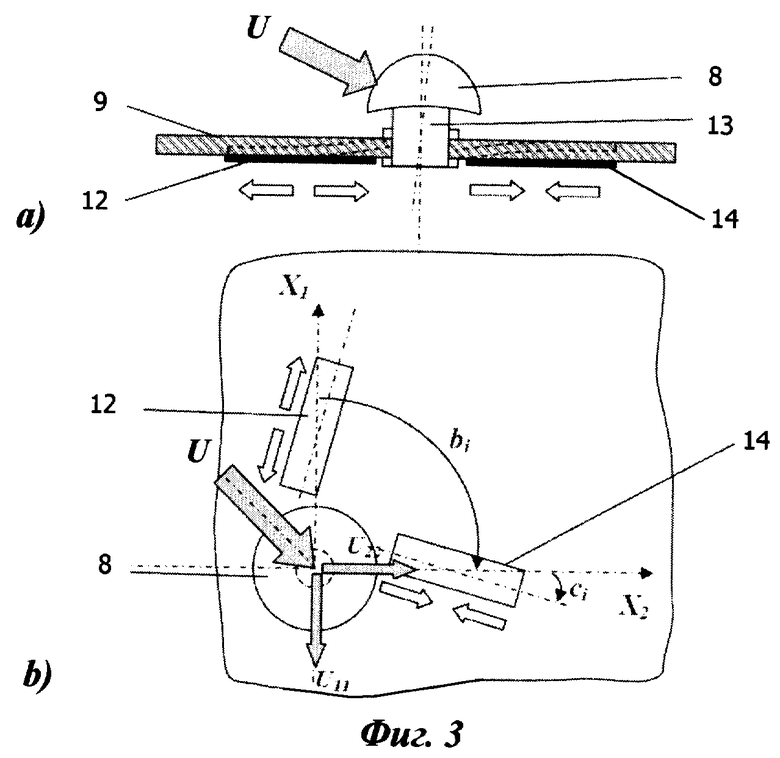
На фиг.3а, b показана схема, иллюстрирующая работу устройства при управлении перемещением курсора.
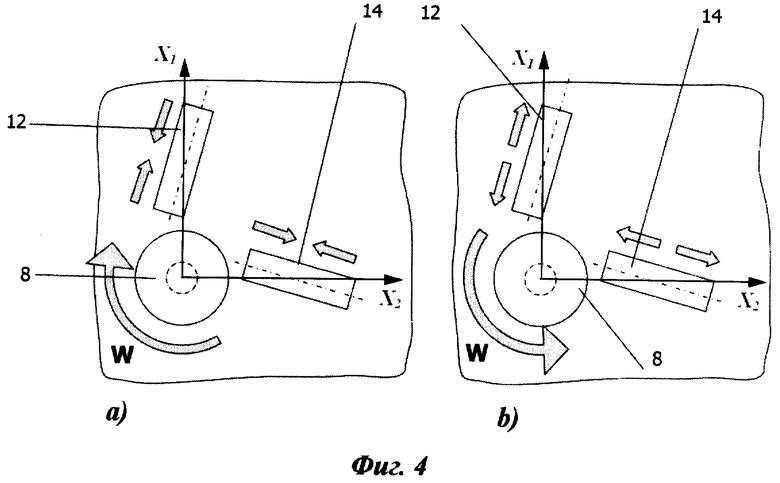
На фиг.4а, b показана схема, иллюстрирующая работу устройства при управлении вращением курсора.
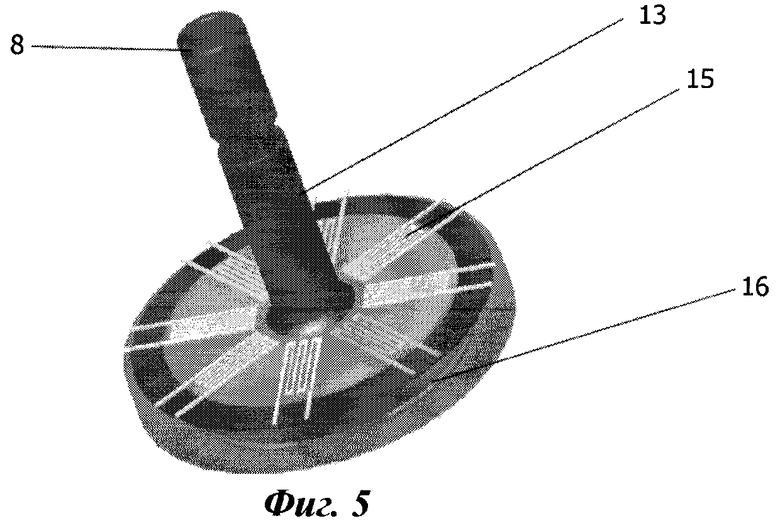
На фиг.5 показано размещение тензорезисторов в узле устройства, выполненном в соответствии с изобретением.
Подробное описание изобретения
На фиг.1 показаны вид спереди и продольный разрез мобильного телефона без клавиш, выполненного в соответствии с изобретением. Мобильный телефон содержит размещенные в корпусе 1 дисплей 2, микропроцессор 3, по меньшей мере один датчик 4 манипулятора, элемент 5, чувствительный к нажатию, зону 6 отображения символов на дисплее 2, курсор 7, манипулятор 8, плату 9 для установки на ней элементов устройства, рамку 10 выделения символов на дисплее 2 и зону 11 отображения набранных символов на дисплее 2, при этом с помощью шин и средств передачи данных (показаны стрелками) вход микропроцессора 3 соединен с датчиком 4 и элементом, чувствительным к нажатию, 5, а выход - с дисплеем 2. Плата 9, на поверхности которой закреплен датчик 4, выполнена из упруго деформируемого материала (например, стеклопластика), манипулятор 8 выполнен в виде стержня, один из концов которого закреплен на плате 9, а другой его конец снабжен головкой, выполненной в виде выпуклой полусферы.
Размещение в руке пользователя устройства, подобного показанному на фиг.1, в процессе ввода символов большим пальцем приведено на фиг.2. Эта фигура иллюстрирует возможность удерживания устройства и набор номера одной рукой.
Управление курсором 7 в соответствии с заявленным изобретением осуществляют, нажимая непосредственно пальцем руки на манипулятор 8 в нужных направлениях. Например, управление курсором для набора номера на мобильном телефоне осуществляется следующим образом. Нажимая на манипулятор в требуемом направлении, подводят курсор 7 к требуемому символу в зоне 6 отображения символов на дисплее 2. При подходе курсора к символу символ подсвечивается рамкой 10. Для ввода символа в память пользователь осуществляет ввод дополнительного сигнала активации курсора путем вертикального нажатия на манипулятор. При этом микропроцессор 3 анализирует значения сигналов со всех датчиков манипулятора, и в момент, когда все сигналы становятся одного знака, вырабатывает сигнал активации курсора, по которому вводится выбранный символ. Аналогичный сигнал может быть выработан и элементом, чувствительным к нажатию, 5. После этого указанный курсором символ отображается в зоне отображения набранных символов 11 и вводится в память устройства как набранный.
Скорость движения курсора 7 по дисплею 2 изменяют путем изменения величины приложенного усилия нажатия на манипулятор 8.
Нажатие может быть сильным или слабым. При слабом нажатии курсор 7 будет двигаться медленно, а при сильном нажатии - очень быстро. Это дает возможность ощутить обратную тактильную реакцию манипулятора 8 и контролировать скорость движения курсора 7. Такой способ регулирования скорости движения курсора 7 удобен тем, что не надо делать лишних движений при его перемещении, например, при прокрутке многостраничных списков или документов.
Удерживая мобильное устройство двумя пальцами одной руки, третий, например большой палец руки, прижимают к манипулятору 8 и совершают им нажатия влево или вправо, вперед и назад, не отрывая пальца. При этом курсор 7, отображаемый на дисплее 2, перемещается по нему синхронно с нажатиями пальцем руки.
Совершая необходимые нажатия пальцем руки, управляют движением курсора 7.
Другое отличие предлагаемого способа и устройства от известных из уровня техники состоит в том, что сигнал активации курсора создают, нажимая пальцем руки на манипулятор 8, так, что на всех тензорезисторах сигнал одновременно становится равным и одного знака. При этом микропроцессор 3 реагирует на такое действие как на сигнал активации символа, который обычно в известных технических решениях вырабатывается путем нажатия кнопок на мыши. Использование такого способа активации так же удобно, как и нажатие кнопки мыши, но не требует никаких дополнительных устройств, что также способствует достижению эффекта миниатюризации устройства, указанного в заявленной технической задаче.
Таким образом, управление курсором 7 в предлагаемом устройстве сводится к нажатию пальцем в требуемом направлении на манипулятор 8, слежению за перемещением курсора 7 и отображаемыми символами в зоне 6 дисплея 2 и прекращению нажатия на манипулятор 8 в момент выделения нужного символа. При этом удерживание устройства и набор символов осуществляют одной рукой, что очень удобно.
Нажатием на манипулятор 8 пользователь определяет направление прилагаемой силы и ее величину, вследствие возникающей при этом деформации платы 9 датчик 4 формирует соответствующий сигнал, который поступает в микропроцессор 3, который формирует команду на перемещение курсора 7 по экрану дисплея 2.
Рассмотрим реализацию заявленного способа управлением курсором 7 на примере работы устройства, выполненного в соответствии с заявленным изобретением и представленного на фиг.1, при этом датчик 4 манипулятора 8 (см. фигуры 3а, b и 4а, b) выполнен на двух тензорезисторах 12 и 14 (или пьезоэлементах), закрепленных на нижней поверхности платы 9, которая играет роль упруго деформируемого элемента датчика, и размещенных по разные стороны от стержня 13 манипулятора 8. Один из концов стержня 13 манипулятора 8 механически связан с платой 9, а другой конец стержня 13 снабжен головкой, к которой пользователь прикладывает палец руки в процессе управления курсором 7.
Рассмотрим работу устройства в процессе управления перемещением курсора 7, используя в качестве ссылок фиг.1, фиг.2 и схему, иллюстрирующую работу устройства при управлении перемещением курсора 7 (фиг.3а, b).
На фигуре 3а представлен разрез узла устройства, включающего манипулятор 8 со стержнем 13, плату 9 и тензорезисторы 12 и 14, при этом на фиг.3а стрелкой показано направление вектора силы U, приложенной к головке манипулятора 8 для перемещения курсора 7, кроме того, на сечении платы 9 пунктиром обозначены области упругих деформаций, возникших в плате 9 под действием силы U, а двумя стрелками под каждым из тензорезисторов 12 и 14 показаны направления действия сил от упругих деформаций в плате 9, приложенные к тензорезисторам 12 и 14, при указанном на фигуре За направлении стрелок тензорезистор 12 находится в состоянии растяжения, а тензорезистор 14 сжат.
На фигуре 3b представлен частный случай возможного размещения двух тензорезисторов 12 и 14 на плате 9 в соответствии с заявленным изобретением. На фигуре 3b обозначены U11, U22 - проекции вектора силы U соответственно на оси координат X1 и Х2, которые соответственно являются вертикальной и горизонтальной осью на плоском дисплее 2. Тензорезисторы 12 и 14 расположены под углом bi=90 градусов друг к другу и с тангенциальным наклоном сi=10 градусов к радиально направленным осям координат X1 и Х2 соответственно.
Устройство работает следующим образом.
Удерживая устройство за корпус 1 в руке, как показано на фиг.2, нажимают пальцем руки в нужном направлении на головку манипулятора 8. Усилие нажатия на головку манипулятора 8 передается стержнем 13 на упруго деформирующийся элемент, функцию которого выполняет плата 9. Упругую деформацию платы 9 фиксируют тензорезисторы 12 и 14. Для определения направления движения курсора 7 по дисплею 2 используют тензорезисторы 12 и 14, наклеенные на упруго деформируемый элемент, функции которого выполняет плата 9, с заранее заданными угловыми положениями относительно друг друга и осей координат X1 и X2 в плоскости дисплея 2. Разлагают силу U, приложенную к манипулятору 8, на составляющие компонентные вектора U11 и U22 и определяют величины компонентных векторов U11 и U22, для чего измеряют сопротивление деформированных тензорезисторов 12 и 14.
Тензорезисторы 12 и 14 поочередно опрашивает коммутатор (не показан) микропроцессора 3. Аналоговые сигналы от тензорезисторов 12 и 14 преобразуют в цифровой вид аналого-цифровым преобразователем (не показан) и передают в микропроцессор 3 (коммутатор и аналого-цифровой преобразователь входят в состав микропроцессора 3). По полученным сигналам микропроцессор 3 по формулам (1)-(3), заложенным в его память, вычисляет углы между проекциями вектора силы U, приложенной к головке манипулятора 8, и осями координат X1 и Х2, определяет угол приложения силы U, приращения перемещения курсора 7 и вырабатывает сигнал на перемещение курсора 7 по дисплею 2 на требуемое расстояние.
Для простых бытовых приложений с целью упрощения обработки сигнала, приращения перемещения курсора на дисплее или управляемого объекта в пространстве можно вычислять по формуле (4).
Для повышения точности управления курсором количество датчиков (тензорезисторов или пьезоэлементов) в устройстве увеличивают, при этом вычисляют по формулам (1)-(3) суммы проекций векторов разложений силы Uj на оси координат, суммируя только отрицательные или только положительные величины проекций каждого вектора разложения силы на оси координат.
В высокоскоростных приборах сигнал с каждого тензорезистора (или пъезоэлемента) может поступать в микропроцессор 3 по отдельному каналу.
Рассмотрим работу устройства в процессе управления вращением курсора 7, используя в качестве ссылок фиг.1 и схему, иллюстрирующую работу устройства при управлении вращением курсора 7 (фиг.4а, b).
На фигурах 4а и 4b представлен тот же частный случай возможного размещения двух тензорезисторов 12 и 14 на плате 9, что и на фигуре 3b, описанной выше.
На фигурах 4а и 4b двумя стрелками рядом с каждым из тензорезисторов 12 и 14 показаны направления действия тангенциальных составляющих сил упругих деформаций в плате 9, приложенных к тензорезисторам 12 и 14, возникающих при действии на головку манипулятора 8 вращающего момента W, направление которого указано круговой стрелкой.
Поворот курсора 7 или управляемого объекта в плоскости осей координат X1X2 в нужном направлении осуществляют, прикладывая пальцами руки вращающий момент в нужном направлении к манипулятору 8 без его вращения, и удерживают его с нужным вращающим моментом, пока курсор или управляемый объект поворачивается (вращается) в заданном направлении, и прекращают приложение вращающего момента при повороте управляемого объекта или курсора 7 на требуемый угол. Скорость поворота (вращения) управляемого объекта или курсора 7 изменяют путем изменения величины вращающего момента, приложенного к манипулятору.
При приложении к головке манипулятора 8 вращающего момента W в плате 9 возникают деформации, величину и знак тангенциальной составляющей которых фиксируют тензорезисторы 12 и 14. При этом можно определить направление и скорость вращения курсора 7 в плоскости осей координат X1X2. Например, в случае приложения вращающего момента W, направленного по часовой стрелке, тензорезисторы 12 и 14 сжимаются (см. фиг.4а). В случае приложения вращающего момента W, направленного против часовой стрелки, тензорезисторы 12 и 14 растягиваются (см. фиг.4b). Аналоговые сигналы от тензорезисторов 12 и 14 преобразуют в цифровой вид и передают в микропроцессор 3, который по формулам (5)-(6), заложенным в его память, вычисляет направление и скорость вращения курсора 7 в плоскости координат по величине и знаку тангенциальной составляющей электрических сигналов тензорезисторов 12 и 14 или направление и скорость вращения, например, объекта управления при электронной игре с использованием телефона.
В некоторых приложениях, в основном в играх с космическими симуляторами и при трехмерном проектировании, требуется вращать объект не в плоскости дисплея 2, а вокруг условных осей объекта. Для этого переключают устройство в новый режим работы. В этом режиме сигнал датчика по каждой оси объекта интерпретируется как его скорость вращения вокруг каждой из осей объекта.
Направление и скорость вращения курсора 7 или объекта управления вокруг осей координат определяют по знакам и величинам Uj - сумм проекций векторов разложений на соответствующие оси координат силы, приложенной к манипулятору, для чего вычисляют величины Uj по формулам (1)-(3) и умножают их на соответствующие масштабные коэффициенты.
Нажимая на манипулятор с любой стороны, можно заставить объект вращаться вокруг нужной оси длительное время с любой скоростью, мгновенно менять направление вращения и его скорость одними лишь легкими прикосновениями. Сделать такое мышью или трекболом невозможно.
Переключаясь в различные режимы управления, пользователь может вращать объект либо в плоскости дисплея, либо в двух плоскостях осей координат. Это очень полезное свойство. Оно может использоваться, когда пользователь рассматривает, например, товар, который он хочет приобрести по сетевым технологиям. Он может вращать этот товар как ему удобно. Если он имеет деталь трехмерного проектирования, то он также может ее детально рассмотреть, вращая как потребуется.
Впервые одним устройством управления в виде манипулятора можно легко перемещать и вращать объекты сразу в нескольких плоскостях.
Чтобы вернуть устройство в обычный режим работы, необходимо послать соответствующий сигнал микропроцессору. Для этого можно использовать, например, отдельную кнопку, хотя можно обойтись и без кнопок вообще.
В очень простых и миниатюрных устройствах, в которых нет возможности установить кнопку, можно получить дополнительный сигнал путем нажатия на манипулятор вертикально сверху вниз. Этот сигнал можно использовать, например, для активизации курсора или смены режима работы устройства.
Для того, чтобы получить такой сигнал, анализируют значения сигналов со всех тензорезисторов или пьезоэлементов, и в момент, когда они все становятся одного знака, вырабатывают первый дополнительный сигнал, а в момент, когда знак хотя бы одного датчика становится отличным от знаков других датчиков, вырабатывают второй дополнительный сигнал. Это происходит потому, что при вертикальном приложении усилия на манипулятор деформация всех датчиков станет одного знака. Для плоских датчиков это растяжение. Микропроцессор может определить это событие и интерпретировать его как сигнал активации.
В устройствах, где используются режимы перемещения и вращения, для того чтобы происходило однозначное определение вертикального приложения нажатия сверху или приложения вращающего момента к манипулятору, при которых знаки деформации всех тензорезисторов одинаковы, устройство управления курсором должно содержать дополнительный элемент, чувствительный к нажатию, расположенный под деформируемым элементом или совмещенный с манипулятором. При срабатывании этого элемента однозначно определяется нажатие. Если элемент не сработал, а знаки деформации датчиков одинаковы, значит, имеет место приложение вращающего момента, и микропроцессор должен интерпретировать сигналы как команды на поворот.
Для удобства использования манипулятор 8 может размещаться не только на передней части устройства, но также и на его боковой стенке аппарата. При этом дополнительно освобождается площадь на передней панели для дисплея, который можно сделать значительно больше и информативнее.
Для компенсации температурных изменений используют датчик температуры и зависимости сопротивления тензорезисторов от температуры, заложенной в память микропроцессора. Для этого измеряют температуру на месте размещения тензорезистора, по зависимости вычисляют температурные помехи и вычитают сигнал помехи из реальных сигналов, поступающих от тензорезистора.
В простых 2-резисторных датчиках может использоваться стандартный способ подключения термокомпенсирующих тензорезисторов, соединенных с активными тензорезисторами по мостовой или иной компенсирующей схеме.
На фиг.5 показано размещение тензорезисторов в устройстве, выполненном в соответствии с изобретением. Конструктивный узел устройства, выполненный в виде отдельной сборной детали, пригодной к монтажу, содержит манипулятор 8, стержень 13 манипулятора 8, восемь тензорезисторов 15 и упруго деформируемый элемент 16, выполненный в виде диска, на поверхности которого в радиальных направлениях по окружности элемента 16 равномерно размещены тензорезисторы 15. Головка манипулятора 8 имеет углубление под тонкий предмет, типа пера шариковой авторучки. Это позволяет управлять с помощью авторучки и вводить очень тонкий рисунок либо использовать сменный набор различных насадок, используемых в зависимости от типа операций, выполняемых с помощью устройства.
Простота устройства позволяет уменьшить размеры устройства ввода символов и повысить его надежность, удобство использования, скорость ввода информации и скорость управления.
Предлагаемая конструкция устройства позволяет широко использовать ее не только для ввода символов, но и для управления объектами. Обычно это имеет место в компьютерных играх, при использовании устройства в качестве пульта дистанционного управления инструментом, приборами, роботами, транспортными, грузоподъемными и иными мобильными или удаленными технологическими средствами.
При использовании изобретения появляется возможность ввода информации путем управления курсором в миниатюрных аппаратах, содержащих дисплей, возможность эффективной замены клавиатур, компьютерных манипуляторов типа "мышь", трекболов, джойстиков, сенсорных экранов, удобство пользования, дальнейшая миниатюризация, удешевление и повышение технологичности устройств. Устройство можно применять как дополнение к традиционной мыши вместо средней кнопки или ролика.
В предлагаемом способе и устройстве управление осуществляется непосредственно путем нажатия пальца руки на манипулятор без его перемещения. Этим обеспечивается миниатюризация рабочего места, так как не требуется рабочий стол для отдельного устройства управления курсором или объектом, например, в виде мыши, трекбола или джойстика.
Предпочтительные примеры реализации изобретения представлены в описании для того, чтобы пояснить специалистам в данной области техники преимущества и возможности промышленной реализации и практической применимости заявленного изобретения. Однако объем изобретения не ограничивается приведенными примерами, объем изобретения определяется следующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХМЕРНЫЙ МИКРОДЖОЙСТИК | 2005 |
|
RU2301439C1 |
| СПОСОБ КОММУТАЦИИ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ И МНОГОФУНКЦИОНАЛЬНЫЙ ПЕРЕКЛЮЧАТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2455678C1 |
| ОПТИЧЕСКИЙ МИНИСТИК | 2015 |
|
RU2594992C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ ПРИБОРАМИ И ПУЛЬТ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2520318C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ КУРСОРА НА ЭКРАНЕ ДИСПЛЕЯ | 1993 |
|
RU2042208C1 |
| ЭЛЕКТРОННАЯ ПИПЕТКА С ДИСПЛЕЕМ И МАНИПУЛЯТОРОМ ДЛЯ УПРАВЛЕНИЯ ЗАБОРОМ И РАСПРЕДЕЛЕНИЕМ ЖИДКОСТИ | 2004 |
|
RU2340397C2 |
| УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ В ЭЛЕКТРОННЫЕ ПРИБОРЫ | 2006 |
|
RU2316806C1 |
| УСТРОЙСТВО ВВОДА | 1991 |
|
RU2022335C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЕРЧАТКИ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2017 |
|
RU2673406C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2583754C2 |
Изобретение относится к способам и устройствам ввода информации и может быть использовано для ввода информации путем управления курсором, отображаемым на дисплее электронного устройства. Техническим результатом является повышение удобства управления курсором, упрощение и миниатюризация устройства ввода. Указанный результат достигается за счет того, что устройство содержит размещенные в корпусе манипулятор, датчик манипулятора, содержащий по меньшей мере два тензорезистора, расположенных на упруго деформируемом элементе, причем манипулятор выполнен в виде стержня, один конец которого закреплен на упруго деформируемом элементе датчика, а тензорезисторы расположены так, что их оси симметрии наклонены относительно радиального направления, проведенного от места закрепления стержня, к центру тензорезистора на угол тангенциального наклона. Для перемещения курсора прикладывают силовое воздействие к манипулятору в направлении желаемого перемещения, а для вращения - вращающий момент, причем скорость вращения курсора изменяют путем изменения величины вращающего момента, приложенного к манипулятору. 2 н. и 16 з.п. ф-лы, 5 ил.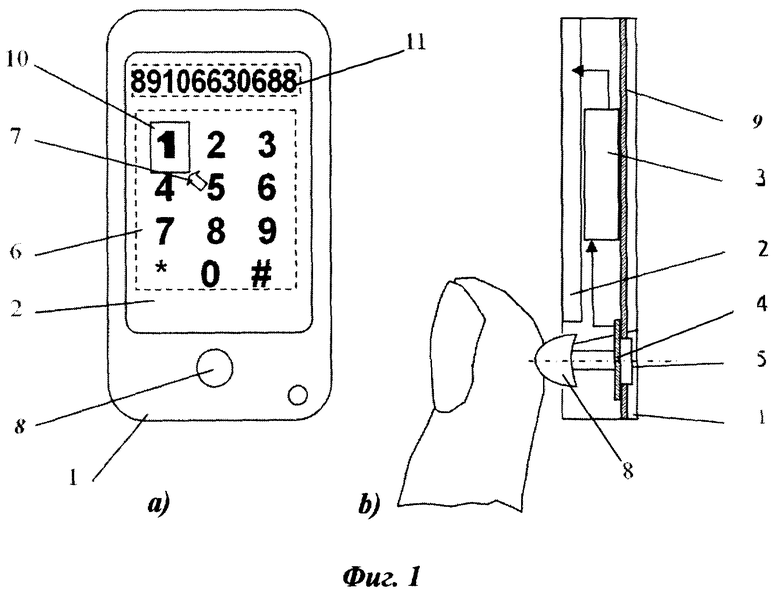
Wkurs=Кw·F(Wi),
где Wkurs - скорость вращения курсора;
Wi=Ri·Ft(ci) - тангенциальная деформации i-го тензорезистора;
Ri - измеренная деформация i-го тензорезистора;
ci - угол тангенциального наклона i-го тензорезистора;
Ft(ci) - тригонометрическая (sin, cos) функция, в зависимости от конструктивного исполнения устройства;
F(Wi) - задаваемая функциональная зависимость скорости вращения от тангенциальной деформации тензорезистора;
Kw - масштабный коэффициент;
в случае неравенства знаков сигналов с тензорезисторов определяется скорость перемещения курсора, для чего вычисляют углы между вектором силы, приложенной к манипулятору, и осями координат по формуле
aj=arctg(Uj/Uj+1),
где аj - вычисленный угол направления силы, приложенной к манипулятору;
j - номер оси координат, например X1 - первая ось координат, связанная с вертикальной осью координат на плоском дисплее, Х2 - вторая ось координат, связанная с горизонтальной осью координат на плоском дисплее;
Uj=Sum(Uij) - сумма проекций векторов разложений силы на j-ю ось координат;
Uij=Ri·Ftj(bij) - величина проекции i-го вектора разложения силы, приложенной к датчику манипулятора на j-ю ось координат;
Ri - измеренная деформация i-го тензорезистора;
bij - известный угол между одной из осей координат и i-м тензорезистором;
Fij(bij) - тригонометрическая (sin, cos) функция в зависимости от конструктивного исполнения устройства,
после чего вычисляют приращения перемещения курсора на дисплее путем сложения векторов
dXj=Kj·Ukurs·Ftj(aj),
где Ukurs - скорость перемещения курсора, определяемая по формуле
Ukurs=(Sum(Uj 2))0.5,
где Kj - согласующие масштабные коэффициенты.
| СПОСОБ ПОЛУЧЕНИЯ ПРЕПАРИРОВАННЫХ СМОЛ И ДОРОЖНЫХ ДЕГТЕЙ | 0 |
|
SU193003A1 |
| УСТРОЙСТВО ВВОДА | 1991 |
|
RU2022335C1 |
| Барабанные летучие ножницы | 1959 |
|
SU135328A1 |
| US 5790102 А, 04.08.1998 | |||
| JP 9128140 А, 16.05.1997. | |||

