Изобретение относится к авиационной технике, а именно к средствам регистрации полетных данных.
Известны системы регистрации полетных данных "Тестер УЗ серии Л" самолета изд. 26-29, которые обеспечивают регистрацию основной, служебной и вспомогательной информации.
Основными недостатками данных систем являются
большая относительная погрешность на малых высотах и скоростях полета, например для высоты 500 м скорости 250 км/ч, она находится для высоты в пределах - 250-230 м и для скорости - 264-130 км/ч, кроме того, отсутствует возможность точной оценки действий летчика на высоте и скорости на важнейших этапах полета: взлете, посадке, маловысотном полете.
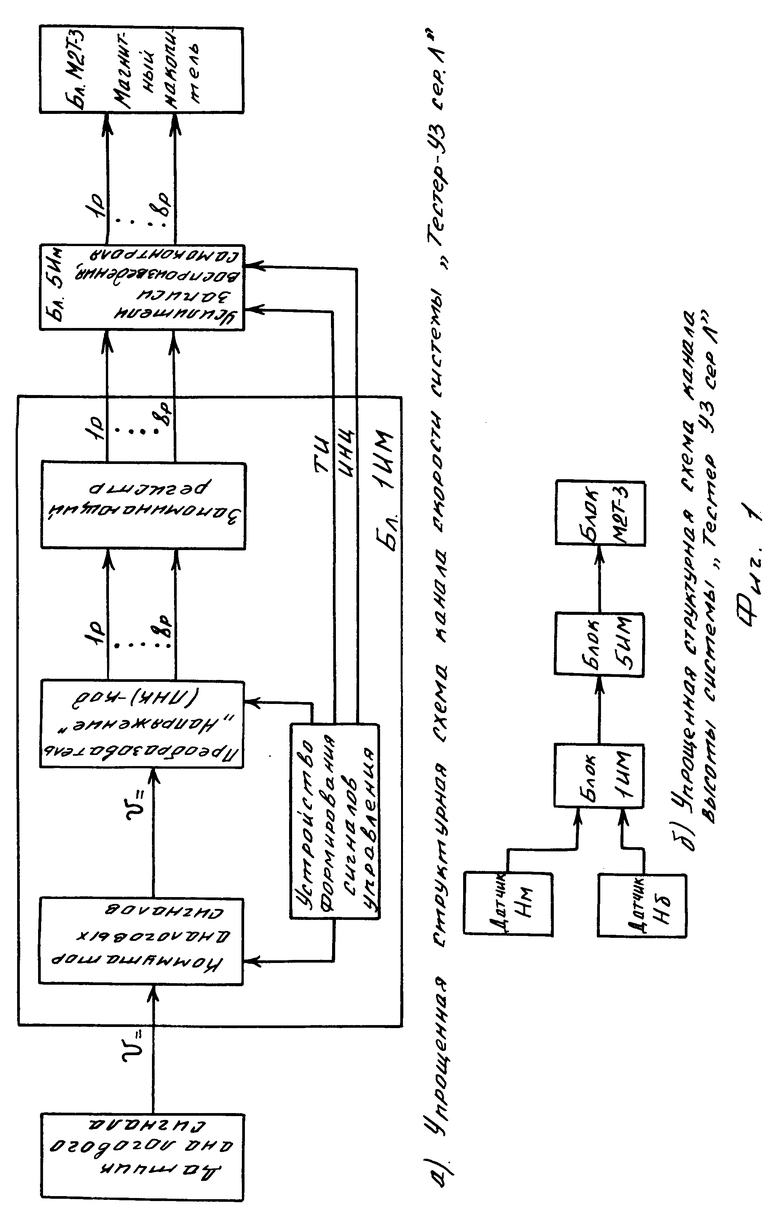
Наиболее близкой по технической сущности к предлагаемой системе регистрации полетной информации является выбранная в качестве прототипа система "Тестер-УЗ сер. Л.". В этой системе для повышения точностных характеристик канала высоты имеются датчик "большой" барометрической высоты (диапазон измерения 9000 - 20000 м) и датчик "малой" барометрической высоты (200 - 9800 м). Упрощенная структурная схема каналов датчиков высоты показана на фиг. 1б. Для этой системы диапазон измерения "большой" высоты 190 мм рт.ст., а диапазон измерения "малой" высоты - 575 мм рт.ст. Максимально допустимая относительная погрешность "малой" высоты
Hм=  =
=  = 15 мм рт.ст./ где б - максимально допустимая относительная погрешность измерительного канала системы "Тестер";
= 15 мм рт.ст./ где б - максимально допустимая относительная погрешность измерительного канала системы "Тестер";
Д - диапазон измерения параметра.
Для той же Нб = 500 м согласно вышеприведенных расчетов это составляет
-ΔН = 380 - 500 = -185 м;
+ ΔН = 675 - 500 = 175 м
Полученные значения существенно точнее, чем у предыдущей системы, однако разброс в определении точного значения параметра по-прежнему остается очень большим, что неудовлетворительно сказывается при решении задач объективного контpоля полетов. К тому же некоторые повышение точности в определении параметра повлекло ряд недостатков: "перекрытие" записей в диапазоне 9000 - 10000 м в регистрации высоты, что снижает качество распознавания параметров оператором; количество каналов измерения параметра высоты возросло до четырех (кадр записи информации длительностью в 1 с разбит на 255 каналов измерения). Это равноценно потере информации от 1-2 датчиков аналоговых сигналов.
В настоящее время актуальными задачами объективного контроля полетов являются контроль качества и полноты выполнения полетного задания летными экипажами, контроль работоспособности авиатехники, установление истинных причин летных происшествий и предпосылок к ним. Решение этих задач невозможно без точного определения скорости взлета и посадки, а также высоты полета. Применяемые в современных системах САРПП, МСРП, Тестер для регистрации высоты и скорости полета потенциометрические датчики типа МДД не обеспечивают необходимую точность и достоверность записи указанных параметров из-за ступенчатости, гистерезиса, повышенной вибрации.
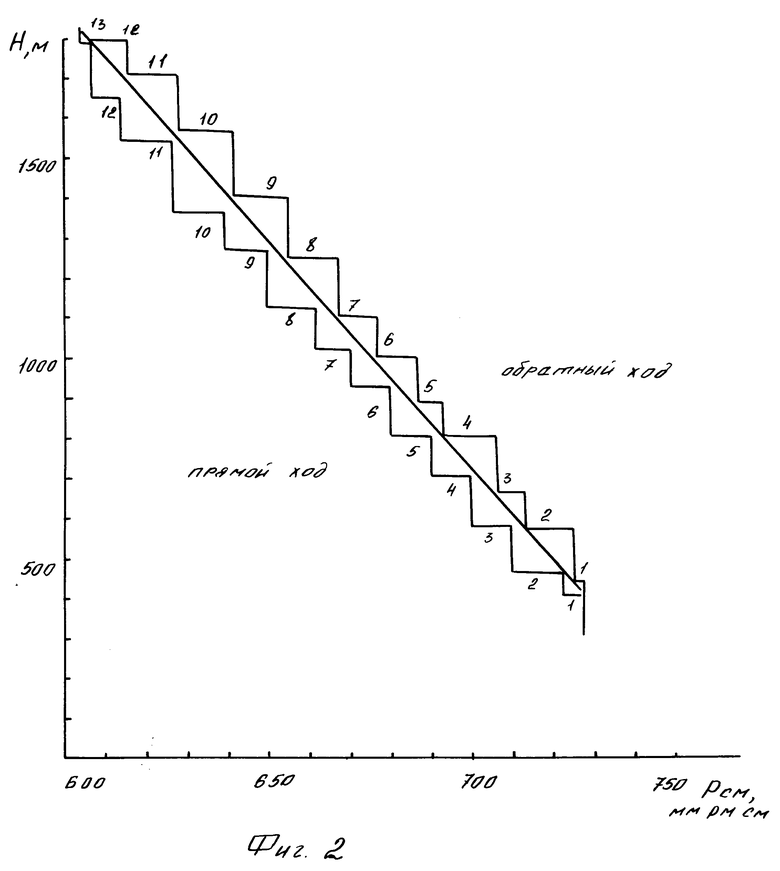
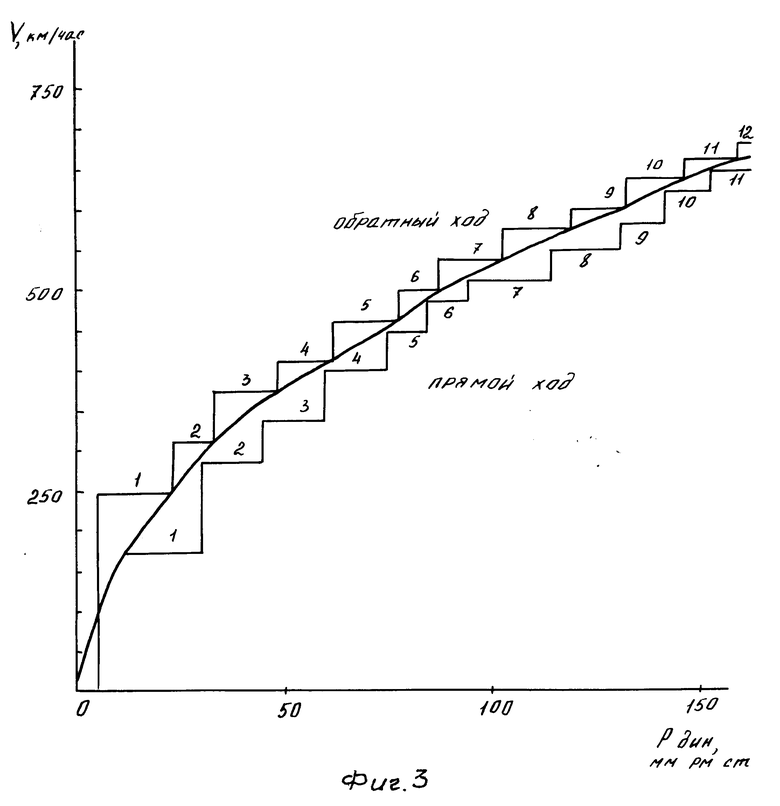
На фиг.2 проиллюстрирована характеристика ступенчатости датчика высоты в зависимости от разрежения Рсм; на фиг.3 - аналогичная характеристика для датчика скорости в зависимости от давления Рдин.
Анализ характеристик показывает, что цена одной ступеньки датчика высоты для первых 20 витков составляет по барометрической высоте 110 м. Наибольшую цену 180 км/ч имеет первая ступенька датчика скорости при переходе с нулевого витка на первый виток, для малых скоростей цена ступенек колеблется от 50 до 30 км/ч. На обратном ходе у датчика высоты переход щетки потенциометра происходит при больших значениях высоты. Для датчика скорости цена ступенек на 10 - 15 км/ч больше, чем при прямом ходе. Наибольшее приращение происходит на первой ступеньке, на которой при обратном ходе скорость становится равной 250 км/ч вместо 180 км/ч.
Ступенчатость линий записи высоты и скорости полета объясняется тем, что потенциометрические датчики типа МДД выполнены в виде однослойной катушки. При переходе щетки потенциометра с витка на виток напряжение на ней изменяется скачком, что приводит к дискретному изменению ординаты линии записи высоты и скорости полета. В этом случае весь диапазон регистрируемых высот и скоростей полета будет развит на число ступенек, равное числу рабочих витков потенциометра. Таким образом, чем меньшей диапазон регистрируемого параметра приходится на витки потенциометра, тем выше точность регистрации параметра. Переключение диапазонов регистрации параметров высоты и скорости должно проводиться в строго фиксированный момент времени, определяемый в зависимости от задач, решаемых боевым авиационным комплексом. С точки зрения безопасности полетов для всех без исключения типов самолетов наиболее опасными являются полеты на предельно малых (до 200 м) и малых высотах (выше 200 м до 1000 м), а также этапы взлета и посадки. В современных бортовых устройствах регистрации параметров полета типа Тестер, МСРП, САРПП отсутствует устройство подключения датчиков высоты и скорости повышенной точности при выполнении взлета, посадки, а также полетов на малых и предельно малых высотах. Применение такого устройства, позволяющего подключать датчики повышенной точности, аналогичные вертолетным датчикам (с диапазонами измерения по высоте - 50-6000 м, по скорости 60-400 км/ч) позволяет свести абсолютные погрешности до следующих значений:
- ΔН = -130 м; - ΔV = -97 км/ч;
+ ΔН = 125 м; + ΔV = 74 км/ч;
Целью изобретения является увеличение точности регистрации полетной информации в маловысотном полете путем автоматического подключения датчиков высоты к скорости повышенной точности.
Это достигается тем, что в известную систему регистрации полетной информации, содержащую штатные датчики скорости и высоты и последовательно соединенные блок электроники, блок усилителей записи, воспроизведения и контроля, магнитный накопитель, дополнительно введены маркерный радиоприемник, три логических элемента И, два логических элемента ИЛИ, логический элемент ИЛИ-НЕ, два логических элемента НЕ, элемент задержки, четыре реле, два концевых выключателя, выпущенного положения соответственно закрылков и шасси, датчик скорости повышенной точности, датчик высоты повышенной точности, датчик давления гидросистемы, радиовысотомер малых высот, задатчик высоты, причем выход маркерного радиоприемника соединен с первым входом первого логического элемента И, второй вход которого взаимосвязан с первыми входами логического элемента ИЛИ-НЕ и второго логического элемента И и с выходом концевого выключателя выпущенного положения шасси, а выход - с первым входом первого логического элемента ИЛИ, соединенного вторым входом со взаимосвязанными первым входом второго логического элемента ИЛИ, вторым входом упомянутого логического элемента ИЛИ-НЕ и выходом концевого выключателя выпущенного положения закрылков, а выходом - с входом первого реле, выход логического элемента ИЛИ-НЕ соединен с входом второго реле, выход датчика давления гидросистемы соединен с вторым входом второго логического элемента И, выход которого соединен с вторым входом второго логического элемента ИЛИ, соединенного третьим входом с выходом элемента задержки, а выходом - с первым входом третьего логического элемента И, второй вход которого соединен с выходом второго логического элемента НЕ, а выход - с входом четвертого реле, выход радиовысотомера малых высот соединен с входом первого логического элемента НЕ, выход которого соединен с входом указанного элемента задержки, выход задатчика высоты соединен с входом второго логического элемента НЕ, выход штатного датчика скорости через второй размыкающий контакт третьего реле и выход датчика скорости повышенной точности через третий замыкающий контакт этого реле взаимосвязаны с первым входом блока электроники, с вторым его входом соединены через первый и второй контакты четвертого реле выходы соответственно штатного датчика высоты и датчика высоты повышенной точности, вход третьего реле через замыкающий контакт первого реле в одной цепи и через первый замыкающий контакт третьего реле и размыкающий контакт второго реле в другой цепи соединен с плюсовой клеммой бортсети, выходы указанных первого - четвертого реле соединены с минусовой шиной бортсети.
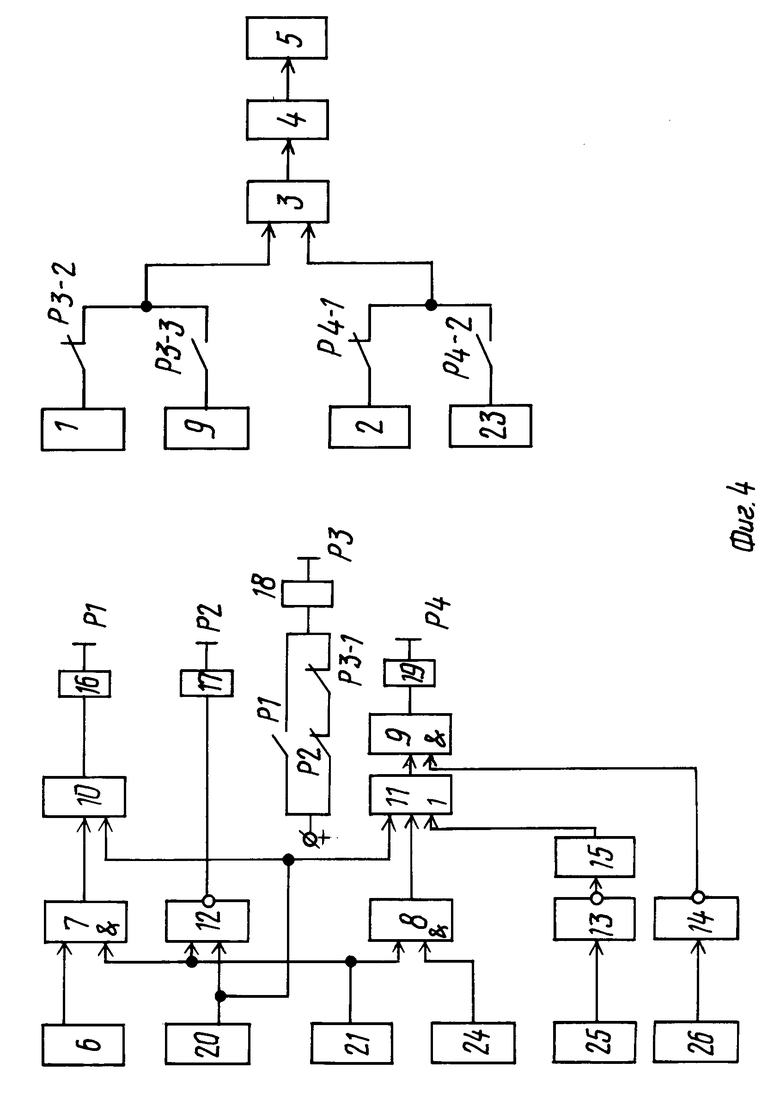
На фиг.1 показаны упрощенные структурные схемы каналов скорости и высоты в системе "Тестер-УЗ сер.Л" самолета МиГ-29; на фиг.2 - характеристика ступенчатости датчика высоты в зависимости от разрежения рст; на фиг.3 - характеристика ступенчатости датчика скорости в зависимости от давления Рдин; на фиг.4 - функциональная схема предлагаемого устройства.
Предлагаемое устройство содержит штатный датчик 1 скорости, штатный датчик 2 высоты, блок 3 электроники, блок 4 усилителей записи, воспроизведения и контроля, магнитный накопитель 5, маркерный радиоприемник 6, первый 7, второй 8, и третий 9 логические элементы И, первый 10 и второй 11 логические элементы ИЛИ, логический элемент ИЛИ-НЕ 12, первый логический элемент НЕ 13, второй логический элемент НЕ 14, элемент 15 выдержки, первое 16, второе 17, третье 18 и четвертое 19 реле, концевой выключатель выпущенного положения закрылков (КВЗ) 20, концевой выключатель выпущенного положения шасси (КВШ) 21, датчик 22 скорости повышенной точности, датчик 23 высоты повышенной точности, датчик 24 давления гидросистемы, радиовысотомер 25 малых высот, задатчик 26 высоты.
В предлагаемом устройстве используется радиовысотомер малых высот, который предназначен для измерения истинной высоты полета самолета с автоматической выдачей ее на указатель. Диапазон измерения высот 0 - 1000 м. Точность измерения в диапазоне 0-10 м ±1 м, а свыше 10 м - 10% от измеряемой высоты. При включении в работу радиовысотомера на указателе высоты выпадает бленкер ненадежности. По истечении времени, необходимого для прогрева, при исправности радиовысотомера бленкера ненадежности исчезает, а стрелка указателя высоты показывает высоту 0±2 м. При полетах на высотах более 1000 м на указатель выпадает бленкер ненадежности. Сигнал схемы формирования выпадания бленкера является управляющим сигналом в предлагаемом устройстве. При полетах на допустимых высотах измерения схема формирования выпадания бленкера выдает запрещающий сигнал. При инвертировании этот сигнал становится сигналом начала полета на малой высоте.
Предлагаемое устройство работает следующим образом.
В рабочем диапазоне измеряемых высот схема формирования выпадания бленкера радиовысотомера 25 выдает сигнал логического "0", преобразуемый первым логическим элементом НЕ 13 в сигнал логической "1", который через элемент задержки 15 поступает на третий вход второго логического элемента ИЛИ 11. С выхода элемента 11 сигнал логической "1" поступает на первый вход третьего логического элемента И 9. Если полет проходит на равнинной местности, то задатчик 25 высоты не выставлен, а сигнал логического "0" с его выхода через второй логический элемент НЕ 14 поступает в виде логический 1 на второй вход элемента И 9. Комбинация сигналов "1-1" на входах элемента И 9 вызывает срабатывание четвертого реле 19. Контактами Р4-1 реле разрывает выдачу сигнала от штатного датчика 2 высоты, а контактами Р4-2 подключает к блоку электроники 3 выход датчика 23 высоты и повышенной точности. Ввод элемента 15 позволяет исключить многочисленные переключения, связанные с пролетом самолета над низинами и впадинами, когда радиовысотомер 25 кратковременно "уходит" из диапазона рабочих высот измерения, а сигнал логической "1" продолжает оставаться на третьем входе элемента ИЛИ 9. Величина задержки по времени выбирается конкретно для каждого типа самолета в пределах от 3 с для сверхзвуковых самолетов до 10 с для дозвуковых самолетов.
В случае посадки на высокогорный аэродром задатчик 26 высоты выставляется и сигнал логической "1", проходя через элемент НЕ 14, блокирует переключение штатного датчика 2 высоты на датчик 23 высоты повышенной точности.
В случае посадки с убранными закрылками сигнал радиовысотомера 25 дублируется схемой выпуска шасси, состоящей из КВШ 21 и датчика 24 давления гидросистемы. При нормальном рабочем давлении гидросистемы с выхода датчика 24 сигнал логической "1" поступает на второй вход элемента И 8, на первый вход которого после выпуска шасси с КВШ 21 поступает сигнал логической "1". Комбинация сигналов "1-1" на входах элемента 8 приводит к появлению на его выходе сигнала логической "1", который поступает на второй вход элемента ИЛИ 11 - происходит подключение датчика 23 высоты повышенной точности. Необходимость ввода датчика 24 давления гидросистемы объясняется следующим. В случае падения давления в гидросистеме ниже допустимого выпуск шасси производится аварийно, а закрылки при заходе на посадку не выпускаются. Выпуск шасси аварийным способом может производиться летным экипажем на скорости, меньшей допустимой по прочности шасси на любой высоте. Введение датчика 24 давления гидросистемы позволяет исключить возможный сбой схемы из-за подключения датчика 24 высоты повышенной точности на большой высоте. Обратное переключение датчиков высоты происходит после уборки шасси, закрылков и на высотах полета свыше 1000 м над рельефом местности, когда радиовысотомер отключается.
Подключение датчика 22 скорости повышенной точности к измерительному каналу регистратора происходит после выпуска закрылков, когда с выхода КВЗ 20 сигнал логической "1" поступает на второй вход элемента ИЛИ 10, вызывая срабатывание первого реле 16. Своими контактами Р1 первое реле 16 обеспечивает срабатывание третьего реле 18, которое через свои контакты РЗ-1 становится на самоблокировку. Контактами РЗ-2 реле 18 разрывает выдачу сигнала от штатного датчика 1 скорости, а контактами РЗ-3 подключает к блоку электроники 3 выход датчика 22 скорости повышенной точности.
В случае посадки без закрылков сигнал с КВЗ 20 дублируется схемой, состоящей из маркерного радиоприемника 6, КВШ 21 и первого логического элемента И 7. При выпущенном шасси после прохождения дальней или ближней приводной радиостанции на выходе маркерного радиоприемника 1 формируется сигнал логической "1", который поступает на первый вход первого логического элемента И 7, на второй вход которого поступает сигнал логической "1" с КВШ 21. Комбинация сигналов "1-1" на входах элемента 7 приводит к появлению на его выходе сигнала логической "1", который поступает на первый вход первого логического элемента ИЛИ 10 - происходит подключение датчика 22 скорости повышенной точности. Самоблокирование третьего реле 18 вызвано необходимостью сохранить подключение датчика 22 к измерительному каналу регистратора после прохождения дальней (ближней) приводной радиостанции до момента окончания пробега.
Обратное подключение датчиков скорости происходит по сигналу схемы контроля шасси и закрылков, состоящей из КВЗ 20, КВШ 21 и логического элемента ИЛИ-НЕ 12. При уборке шасси и закрылков с выхода КВЗ 20 и КВШ 21 на входы элемента 12 поступят сигналы логического "0". В результате срабатывает второе реле 17, вызывая размыканием своих контактов Р2 отключение третьего реле 18, на вход регистратора подключается штатный датчик 1 скорости.
В сравнении с одним из известных устройств предлагаемая система регистрации полетной информации обеспечивает автоматическое двух-трехкратнорезервированное подключение датчиков высоты и скорости повышенной точности к измерительным каналам системы "Тестер" по сигналам выпуска шасси, закрылков, радиовысотомера и маркерного радиоприемника. Тем самым по сравнению с прототипом максимально допустимая абсолют- ная погрешность для канала высоты снижается на 29%, а для канала скорости - на 60% при равном количестве отводимых для регистрации каналов. Это повышает качество всех видов объективного контроля (межполетного, полного, специального), что благоприятно сказывается на безопасности полетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ФАР ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2009056C1 |
| ИМИТАТОР ВИЗУАЛЬНОЙ ОБСТАНОВКИ ДЛЯ ТРЕНАЖЕРА ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU1759158C |
| АВИАЦИОННЫЙ ТРЕНАЖЕР | 1989 |
|
RU1723915C |
| ПРОГНОЗИРУЮЩАЯ СИСТЕМА ОЦЕНКИ ЛЕТЧИКА ДЛЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 1991 |
|
RU2006958C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2009077C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ПРИ ИСПЫТАНИЯХ ТРЕНАЖЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
SU1833694A3 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
Изобретение относится к авиационной технике, а именно к средствам регистрации полетных данных. Цель: увеличение точности регистрации полетной информации в маловысотном полете путем автоматического подключения датчиков высоты и скорости повышенной точности. Сущность изобретения: в известную систему регистрации полетной информации дополнительно введены маркерный радиоприемник, три элемента И, два элемента НЕ, элемент выдержки, четыре реле, два концевых выключателя выпущенного положения закрылков и шасси, датчик скорости повышенной точности, датчик высоты повышенной точности, датчик давления гидросистемы, радиовысотомер малых высот, задатчик высоты, которые обеспечивают увеличение точности регистрации полетной информации в маловысотном полете, что в итоге повышает безопасность полетов. 4 ил.
СИСТЕМА РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ, содержащая штатные датчики скорости и высоты и последовательно соединенные блок электроники, блок усилителей записи, воспроизведения и контроля, магнитный накопитель, отличающаяся тем, что в нее дополнительно введены маркерный радиоприемник, три элемента И, два элемента ИЛИ, элемент ИЛИ - НЕ, два элемента НЕ, элемент задержки, четыре реле, два концевых выключателя выпущенного положения соответственно закрылков и шасси, датчик скорости повышенной точности, датчик высоты повышенной точности, датчик давления гидросистемы, радиовысотомер малых высот, задатчик высоты, причем выход маркерного радиоприемника соединен с первым входом первого элемента И, второй вход которого взаимосвязан с первыми входами элемента ИЛИ - НЕ и второго элемента И и с выходом концевого выключателя выпущенного положения шасси, а выход - с первым входом первого элемента ИЛИ, соединенного своим вторым входом с взаимосвязанными первым входом второго элемента "ИЛИ", вторым входом упомянутого элемента ИЛИ - НЕ и выходом концевого выключателя выпущенного положения закрылков, а выходом - с входом первого реле, выход элемента ИЛИ - НЕ соединен с входом второго реле, выход датчика давления гидросистемы соединен с вторым входом второго элемента И, выход которого соединен с вторым входом второго элемента ИЛИ, соединенного своим третьим входом с выходом элемента задержки, а выходом - с первым входом третьего элемента И, второй вход которого соединен с выходом второго элемента НЕ, а выход - с входом четвертого реле, выход радиовысотомера малых высот соединен с входом первого элемента НЕ, выход которого соединен с входом указанного элемента задержки, выход задатчика высоты соединен с входом второго элемента НЕ, выход штатного датчика скорости через второй размыкающий контакт третьего реле и выход датчика скорости повышенной точности через третий замыкающий контакт этого реле взаимосвязаны с первым входом блока электроники, с вторым его входом соединены через первый и второй контакты четвертого реле выходы соответственно штатного датчика высоты и датчика высоты повышенной точности, вход третьего реле через замыкающий контакт первого реле в одной цепи и через последовательно соединенные первый размыкающий контакт третьего реле и замыкающий контакт второго реле в другой цепи соединен с плюсовой клеммой бортсети, выходы указанных первого - четвертого реле соединены с минусовой шиной бортсети.
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Способ смены деревянных мостовых ферм | 1922 |
|
SU473A1 |
| ДСП. | |||
