Изобретение относится к вычислительной технике и может быть использовано для формирования оценки локального среднего значения сигнала в устройствах обработки цифровой информации, в цифровых измерительных приборах и других устройствах.
Известно устройство для вычисления скользящего среднего [1], содержащее генератор тактовых импульсов, блок управления, коммутатор, сумматор, первый и второй регистры. Устройство реализует вычисление значения оценки локального среднего значения сигнала.
Недостатком устройства является низкая точность формирования оценки локального среднего значения структурного сигнала при наличии импульсной помехи.
Наиболее близким к заявляемому техническому решению является устройство для экстремальной фильтрации [2], cодержащее компараторы (схемы сравнения), регистры, группы элементов задержки и коммутаторы. Устройство реализует вычисление результатов операции экстремальной фильтрации структурных сигналов.
Недостатком устройства является низкая точность формирования результатов фильтрации структурных сигналов при наличии импульсной помехи.
Целью изобретения является повышение точности фильтрации структурных сигналов при наличии импульсной помехи.
Цель достигается тем, что в устройство для сглаживания импульсной помехи, содержащее компараторы, две группы элементов задержки и коммутатор, введены сглаживающий фильтр, элемент ИЛИ, два блока постоянной памяти и блок задержки, информационный вход которого является информационным входом устройства, причем i-й выход (i= ) блока задержки соединен с первым входом i-го компаратора, вторые входы компараторов подключены к n-му выходу блока задержки, соединенному с первым информационным входом коммутатора, выход которого является выходом устройства и подключен к информационному входу сглаживающего фильтра, выход которого соединен с вторым информационным входом коммутатора, управляющий вход которого подключен к выходу элемента ИЛИ, входы которого соединены с выходами блоков постоянной памяти, выходы "меньше" компараторов непосредственно и через одноименные элементы задержки первой группы соединены с соответствующими входами первого блока постоянной памяти, выходы "больше" компараторов непосредственно и через одноименные элементы задержки второй группы подключены к соответствующим входам второго блока постоянной памяти, тактовые входы блока задержки, элементов задержки групп и сглаживающего фильтра подключены к тактовому входу устройства.
) блока задержки соединен с первым входом i-го компаратора, вторые входы компараторов подключены к n-му выходу блока задержки, соединенному с первым информационным входом коммутатора, выход которого является выходом устройства и подключен к информационному входу сглаживающего фильтра, выход которого соединен с вторым информационным входом коммутатора, управляющий вход которого подключен к выходу элемента ИЛИ, входы которого соединены с выходами блоков постоянной памяти, выходы "меньше" компараторов непосредственно и через одноименные элементы задержки первой группы соединены с соответствующими входами первого блока постоянной памяти, выходы "больше" компараторов непосредственно и через одноименные элементы задержки второй группы подключены к соответствующим входам второго блока постоянной памяти, тактовые входы блока задержки, элементов задержки групп и сглаживающего фильтра подключены к тактовому входу устройства.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается наличием новых блоков: блока элементов задержки, группы из N компараторов, двух групп элементов задержки, первого и второго преобразователь кодов, элемента ИЛИ, сглаживающего фильтра, а также их связями между собой и с остальными элементами схемы. Это позволяет сделать вывод о соответствии заявляемого устройства критерию "новизна".
Сопоставительный анализ с другими техническими решениями показывает, что компараторы, преобразователи кодов, элементы ИЛИ широко известны. Блок элементов задержки может быть реализован как последовательное соединение элементов задержки на один такт работы. В качестве элемента задержки на один такт работы может быть использован параллельный регистр на MS-триггерах. Элемент задержки группы может быть реализован как сдвиговый регистр соответствующей длины. Параллельные регистры и сдвиговые регистры на MS-триггерах широко известны. Реализация коммутаторов также широко известна. Сглаживающий фильтр может быть реализован как блок элементов задержки, выходы которого соединены с входами многовходового сумматора. Многовходовой сумматор можно реализовать на основе двухвходовых сумматоров при помощи параллельно-последовательной схемы, которая известна. Сумматоры для сложения двух операндов также широко известны.
Однако введение известных блоков в указанной связи придает всему устройству новое качество, а именно позволяет повысить точность фильтрации структурного сигнала при наличии импульсной помехи. Это позволяет сделать вывод о соответствии заявляемого решения критерию "изобретательский уровень".
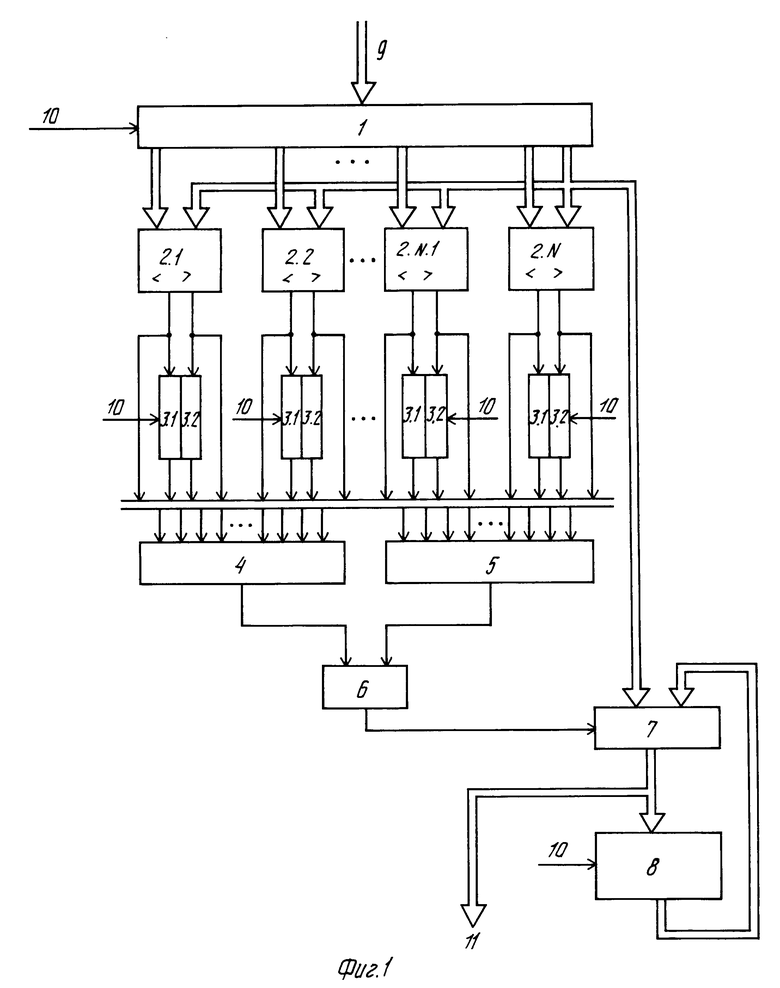
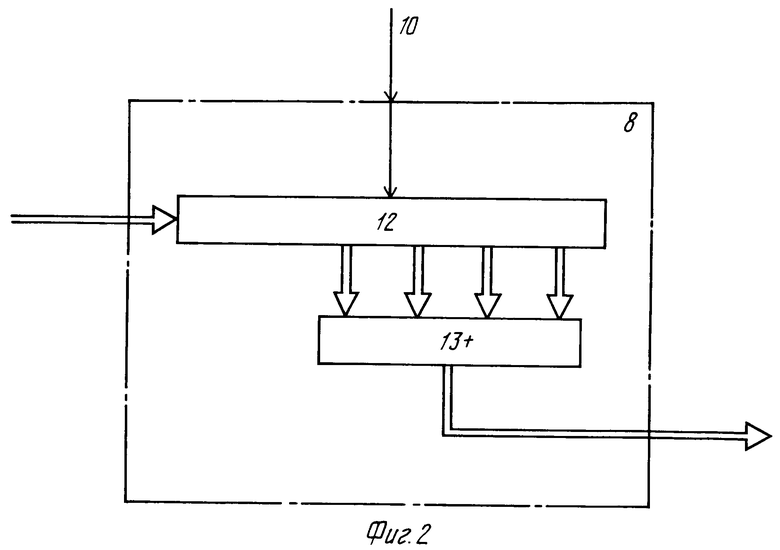
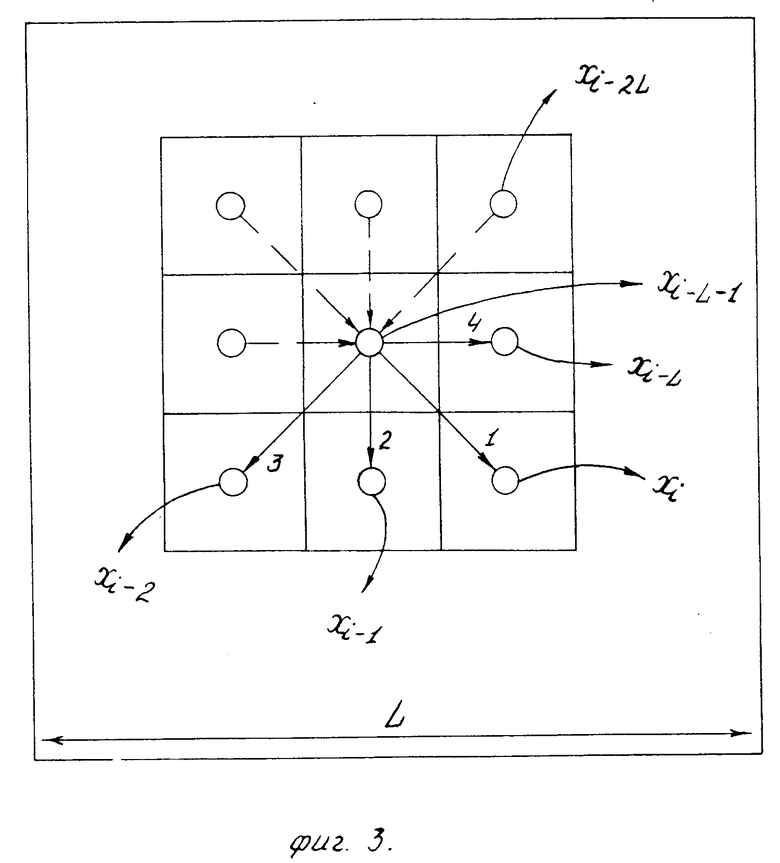
На фиг. 1 представлена блок-схема заявляемого устройства; на фиг. 2 - схема сглаживающего фильтра; на фиг. 3 - пример взаимного расположения текущего отсчета хi сигнала и элементов текущей локальной окрестности размерами 3х3 с центральным отсчетом хi - L-1, сплошными стрелками соединены отсчеты, значения которых необходимо попарно сравнить на текущем этапе обработки, пунктирными соединены пары отсчетов, признаки результатов сравнения значений которых был получены на предшествующих этапах работы.
Устройство содержит блок 1 элементов задержки, группу компараторов 2.1, 2.2, . . .,2.N-1, 2.N, группу элементов 3.1 задержки и группу элементов 3.2 задержки, блоки 4 и 5 памяти, элемент ИЛИ 6, коммутатор 7, сглаживающий фильтр 8, информационный вход 9 устройства, тактовый вход 10 устройства, выход 11 устройства.
Информационный вход 9 соединен с входом блока 1 элементов задержки, i-й выход (i= ) блока 1 элементов задержки соединен с первым входом компаратора 2.i группы. Вторые входы компараторов 2.1, 2.2,...,2.N-1, 2.N объединены с первым входом коммутатора 7 и соединены с (N+1)-м выходом блока 1 элементов задержки. Выходы "меньше" компараторов 2.i (i=
) блока 1 элементов задержки соединен с первым входом компаратора 2.i группы. Вторые входы компараторов 2.1, 2.2,...,2.N-1, 2.N объединены с первым входом коммутатора 7 и соединены с (N+1)-м выходом блока 1 элементов задержки. Выходы "меньше" компараторов 2.i (i= ) соединены непосредственно и через одноименные элементы 3.1 задержки первой группы с соответствующими входами блока 4 памяти. Выходы "больше" компараторов 2.i (i=
) соединены непосредственно и через одноименные элементы 3.1 задержки первой группы с соответствующими входами блока 4 памяти. Выходы "больше" компараторов 2.i (i=  ) соединены непосредственно и через одноименные элементы 3.2 задержки второй группы с соответствующими входами блока 5 памяти. Выходы блоков 4 и 5 памяти соединены с соответствующими входами элемента ИЛИ 6. Выход элемента ИЛИ 6 соединен с управляющим входом коммутатора 7. Выход коммутатора 7 соединен с выходом 11 устройства и входом сглаживающего фильтра 8. Выход сглаживающего фильтра 8 соединен с вторым входом коммутатора 7. Тактовые входы блока 1 элементов задержки, элементов 3.1, 3.2,...,3.N-1, 3.N задержки группы и сглаживающего фильтра 8 объединены и соединены с тактовым входом 10 устройства.
) соединены непосредственно и через одноименные элементы 3.2 задержки второй группы с соответствующими входами блока 5 памяти. Выходы блоков 4 и 5 памяти соединены с соответствующими входами элемента ИЛИ 6. Выход элемента ИЛИ 6 соединен с управляющим входом коммутатора 7. Выход коммутатора 7 соединен с выходом 11 устройства и входом сглаживающего фильтра 8. Выход сглаживающего фильтра 8 соединен с вторым входом коммутатора 7. Тактовые входы блока 1 элементов задержки, элементов 3.1, 3.2,...,3.N-1, 3.N задержки группы и сглаживающего фильтра 8 объединены и соединены с тактовым входом 10 устройства.
Сглаживающий фильтр 8 содержит блок 12 элементов задержки и сумматор 13. Вход сглаживающего фильтра 8 соединен с входом блока 12 элементов задержки, выходы которого соединены с соответствующими входами сумматора 13. Выход сумматора 13 является выходом фильтра 8. Тактовый вход фильтра 8 соединен с тактовым входом блока элементов задержки.
Устройство-прототип реализует вычисление результатов экстремальной фильтрации сигнала. Оно может быть использовано для экстремальной фильтрации структурных сигналов (структурный сигнал представляет собой последовательность протяженных однородных участков, на границе которых осуществляется резкое скачкообразное изменение (перепад) значения сигнала, примером двумерного структурного сигнала является телевизионное изображение). Однако при наличии в сигнале высокоамплитудной импульсной помехи точность формируемых результатов резко падает и результаты фильтрации определяются параметрами (значениями) помехи. Повысить точность фильтрации для структурного сигнала при наличии импульсной помехи можно следующим образом.
Значение в точке, искаженной высокоамплитудной импульсной помехой, как правило, намного больше или меньше значений в остальных точках ее некоторой локальной окрестности, т.е. попадает в крайние элементы вариационного ряда, построенного для значений в точках этой текущей локальной окрестности. Анализируя положение значения сигнала в текущей точке относительно значений сигнала в точках, принадлежащих ее некоторой окрестности, можно определить, является ли значение в текущей точке импульсным шумовым выбросом или нет. Если значение сигнала в текущей точке является шумовым выбросом, то оно заменяется на значение, определяемое при помощи линейного предсказания по скорректированным ранее значениям сигнала в соседних точках. Если значение сигнала в текущей точке не является шумовым выбросом, то оно не меняется. Такой подход позволяет подавить импульсную помеху в структурном сигнале, сохраняя при этом перепады значения сигнала на границах однородных областей, и тем самым повысить точность фильтрации структурного сигнала при наличии импульсной помехи.
Заявляемое устройство реализует вычисление результатов функции
yi = 


 ,
,
(1) где х1 - значение исходного сигнала в текущей i-й точке;
yi - значение скорректированного сигнала в i-й точке;
τi - признак наличия в i-й точке импульсной помехи (0 - нет, 1 - есть);
Zi - значение сигнала, полученное на основе линейного предсказания для i-й точки;
τi = 

(2)
где S1 - количество точек окрестности Qi текущей i-й точки, значения которых меньше хi;
S2 - количество точек окрестности Qi текущей i-й точки, значения которых больше хi.
S1=  h(xj,xi) ;
h(xj,xi) ;
S2=  h(xi;xj) ;
h(xi;xj) ;
h(xi, xj) = 



 , где k - количество точек в локальной окрестности Qi;
, где k - количество точек в локальной окрестности Qi;
α - пороговая величина, задана априори;
h(xi, xj) - результат сравнения значений хi и xj;
Qi - локальная окрестность текущей i-й точки.
Zi=  ·
·  yj , где Gi - множество соседних с i-й точек, по скорректированным значениям которых на основе линейного предсказания формируется значение для i-й точки;
yj , где Gi - множество соседних с i-й точек, по скорректированным значениям которых на основе линейного предсказания формируется значение для i-й точки;
М - количество точек в множестве Gi.
Устройство работает следующим образом.
В начальный момент времени блоки 1, 12 элементов задержки, группы элементов 3.1, 3.2 задержки обнулены.
В каждом такте работы устройства параллельный код текущего отсчета сигнала с информационного входа 9 устройства поступает на вход блока 1 элементов задержки. При помощи блока 1 элементов задержки осуществляется параллельное формирование значений отсчетов сигнала, которые необходимо затем попарно сравнить. При этом значения, поступающие на вход блока 1 элементов задержки, последовательно задерживаются на соответствующее количество тактов работы. Для простоты описания работы устройства рассмотрим случай, когда обрабатывается двумерный структурный сигнал (изображение), а размеры локальный окрестности - 3х3 элемента. В этом случае k=9, N=4 и блок 1 элементов задержки имеет пять выходов, на которых формируются значения, задержанные на один, два, три, (L-2) и (L-2) тактов работы соответственно (L - количество отсчетов в строке изображения).
На фиг. 3 представлен пример взаимного расположения элементов локальной окрестности размерами 3х3, причем сплошными стрелками связаны элементы текущей окрестности, значения которых подлежат попарному сравнению, а пунктирными стрелками связаны элементы, результаты попарного сравнения значений которых получены на предыдущих этапах работы. Таким образом, формирование множества результатов попарного сравнения значения центрального отсчета и остальных отсчетов текущей локальной окрестности осуществляется рекуррентно в том смысле, когда вновь формируется минимальное количество признаков попарного сравнения соответствующих значений. Пусть в i-м такте работы на первом-пятом выходах блока 1 элементов задержки формируются значения отсчетов х1, хi-1, xi-2, xi-L, xi-L-1 соответственно (см. фиг. 3). Значения xi, xi-1, xi-2, и xi-L с первого-четвертого выходов блока 1 элементов задержки поступают на первые входы компараторов 2.1, 2.2, 2.3 и 2.4, на вторые входы которых и первый вход коммутатора поступает значение xi-L-1центрального элемента текущей окрестности. Результаты попарного сравнения соответствующих значений с выходов "больше" и "меньше" компаратора 2.i (i=1,4) поступают на соответствующие входы элементов 3.1 и 3.2 задержки групп. На выходах соответствующих элементов 3.1 и 3.2 задержки групп формируют значения полученных ранее результатов попарного сравнения значения центрального отсчета окрестности и значений отсчетов, связанных с центральной пунктирной стрелкой. Элементы 3.1, 3.2 задержки групп в случае окрестности размерами 3х3 имеют длину (L+1), L, (L-1) и 1 соответственно. Тогда в текущем такте работы на выходах элементов 3.1 и 3.2 задержки групп формируются результаты сравнения значения xi-L-1 и значений хi-2L-2, хi-2L-1, хi-2L и xi-L-2 соответственно.
Таким образом, вновь фоpмируются результаты сравнения значения xi-L-1 и значений xi-1, xi-2 и xi-L. Таким образом, при проведении всего четырех сравнений рекуррентно формируется необходимое множество результатов попарного сравнения значений соответствующих отсчетов текущей локальной окрестности 3х3.
Значения с выходов "меньше" компараторов 2,1,....,2.4 и соответствующих выходов элементов 3.1 задержки группы поступают на входы блока 4 памяти. Значения с выходов "больше" компараторов 2.1,...,2.4 и соответствующих выходов элементов 3.1,... задержки группы поступают на входы блока 5 памяти. В блоках 4 и 5 реализовано табличное вычисление результатов функций
Y(a1, . ..,a8) = 
 где аi - значение на i-м входе блока памяти, аi ∈(0,1). На выходе блока 4 памяти формирует логическая "1", если S1 ≥ k- α, и нуль в противном случае. На выходе блока 5 памяти формируется логическая "1", если выполняется условие S2 ≥k-α, и нуль в противном случае. На выходе элемента ИЛИ 6 формируется значение признака τi (согласно выражению (2)), которое поступает на управляющий вход коммутатора 7. На второй вход коммутатора 7 поступает код величины Zi-L-1 с выхода сглаживающего фильтра 8.
где аi - значение на i-м входе блока памяти, аi ∈(0,1). На выходе блока 4 памяти формирует логическая "1", если S1 ≥ k- α, и нуль в противном случае. На выходе блока 5 памяти формируется логическая "1", если выполняется условие S2 ≥k-α, и нуль в противном случае. На выходе элемента ИЛИ 6 формируется значение признака τi (согласно выражению (2)), которое поступает на управляющий вход коммутатора 7. На второй вход коммутатора 7 поступает код величины Zi-L-1 с выхода сглаживающего фильтра 8.
Значение результата Yi-L-1 (согласно выражению (1)) с выхода коммутатора 7 поступает на выход 11 устройства и вход сглаживающего фильтра 8. Значение Yi-L-1 с входа сглаживающего фильтра 8 поступает на вход блока 12 элементов задержки, на первом-четвертом выходах которого формируются значения, задержанные на 1, (L-1), L и (L+1) тактов работы. Значения Yi-L-2, Yi-2L-2, Yi-2L-1, Y1-2L с выходов блока 12 элементов задержки поступают на входы сумматора 13. На выходе сумматора 13 формируется значение
Zi-L-1=  (Yi-L-2+Yi-2L-2+Yi-2L-1+Yi-2L) (деление на четыре осуществляется путем отбрасывания двух младших разрядов). Значение Zi-L-1 с выхода сумматора 13 поступает на выход фильтра 8 и затем на второй вход коммутатора 7. Таким образом, в каждом такте работы в фильтре 8 осуществляется линейное предсказание значения текущего отсчета по значениям соседних обработанных ранее отсчетов.
(Yi-L-2+Yi-2L-2+Yi-2L-1+Yi-2L) (деление на четыре осуществляется путем отбрасывания двух младших разрядов). Значение Zi-L-1 с выхода сумматора 13 поступает на выход фильтра 8 и затем на второй вход коммутатора 7. Таким образом, в каждом такте работы в фильтре 8 осуществляется линейное предсказание значения текущего отсчета по значениям соседних обработанных ранее отсчетов.
С приходом очередного тактового импульса в блоках 1 и 12 и элементах 3.1, . ..,3.N задержки осуществляются прием нового значения с входа (по переднему фронту тактового импульса) и сдвиг информации (по заднему фронту тактового импульса) и начинается новый такт работы устройства. Таким образом, в каждом такте работы устройства на его выходе 11 формируется согласно выражению (1) результат операции сглаживания для текущей точки.
При обработке двумерного структурного сигнала при помощи локальной окрестности больших размеров, чем 3х3 устройство работает аналогично с учетом того, что блок 1 элементов задержки предназначен для параллельного формирования значений элементов локальной окрестности больших размеров, имеет больше выходов, количество компараторов и элементов задержки также другое и элементы задержки имеют соответствующую длину.
При обработке по одномерной локальной окрестности (размеры 1хk) блок элементов задержки реализуется как последовательное соединение (k+1) элементов задержки на один такт, выход j-го элемента задержки на один такт является соответствующим выходом блока. Аналогично блок 12 элементов задержки может быть реализован как последовательное соединение четырех элементов задержки на один такт работы.
Предлагаемое устройство позволяет реализовать фильтрацию структурного сигнала на основе его выборочного усреднения. Оно позволяет подавить в сигнале импульсную помеху, тем самым позволяет повысить точность фильтрации структурного сигнала при наличии импульсной помехи. Высокое быстродействие позволяет эффективно использовать предлагаемое устройство в специализированных быстродействующих системах обработки сигналов различного назначения, например в автоматизированных системах обработки изображений в реальном масштабе времени.
Устройство к вычислительной технике и может быть использовано для формирования оценки локального среднего значения сигнала в устройствах обработки цифровой информации, в цифровых измерительных приборах и устройствах. Целью изобретения является повышение точности фильтрации структурных сигналов при наличии импульсной помехи. Цель достигается тем, что в устройство для сглаживания импульсной помехи, содержащее компараторы, две группы элементов задержки и коммутатор, введены сглаживающий фильтр, элемент ИЛИ, два блока постоянной памяти и блок задержки, информационный вход которого является информационным входом устройства. Устройство позволяет эффективно подавить импульсную помеху в структурном сигнале путем его выборочного усреднения. Высокое быстродействие позволяет эффективно использовать устройство в быстродействующих системах обработки сигналов, например для обработки телевизионных изображений в реальном масштабе времени. 3 ил.
УСТРОЙСТВО ДЛЯ СГЛАЖИВАНИЯ ИМПУЛЬСНОЙ ПОМЕХИ, содержащее компаратор, две группы элементов задержки и коммутатор, отличающееся тем, что в него введены сглаживающий фильтр, элемент ИЛИ, два блока постоянной памяти и блок задержки, информационный вход которого является информационным входом устройства, а i-й выход где i =  ) блока задержки соединен с первым входом i-го компаратора, вторые входы компаратора подключены к n-му выходу блока задержки, соединенному с первым информационным входом коммутатора, выход которого является выходом устройства и подключен к информационному входу сглаживающего фильтра, выход которого соединен с вторым информационным входом коммутатора, управляющий вход которого подключен к выходу элемента ИЛИ, входы которого соединены с выходами блоков постоянной памяти, выходы "Меньше" компараторов непосредственно и через одноименные элементы задержки первой группы соединены с соответствующими входами первого блока постоянной памяти, выходы "Больше" компараторов непосредственно и через одноименные элементы задержки второй группы подключены к соответствующим входам второго блока постоянной памяти, тактовые входы блока задержки, элементов задержки групп и сглаживающего фильтра подключены к тактовому входу устройства.
) блока задержки соединен с первым входом i-го компаратора, вторые входы компаратора подключены к n-му выходу блока задержки, соединенному с первым информационным входом коммутатора, выход которого является выходом устройства и подключен к информационному входу сглаживающего фильтра, выход которого соединен с вторым информационным входом коммутатора, управляющий вход которого подключен к выходу элемента ИЛИ, входы которого соединены с выходами блоков постоянной памяти, выходы "Меньше" компараторов непосредственно и через одноименные элементы задержки первой группы соединены с соответствующими входами первого блока постоянной памяти, выходы "Больше" компараторов непосредственно и через одноименные элементы задержки второй группы подключены к соответствующим входам второго блока постоянной памяти, тактовые входы блока задержки, элементов задержки групп и сглаживающего фильтра подключены к тактовому входу устройства.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для экстремальной фильтрации | 1988 |
|
SU1569820A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
