Изобретение относится к устройствам измерения высоты воздушного судна (ВС) над поверхностью Земли (на малых высотах), в частности для измерения высоты вертолета.
Известны барометрические, оптические и радиовысотомеры, а также радиоизотропные методы измерения высоты [1]. Измерение малых высот (до 50 м) с помощью указанных методов весьма затруднительно по ряду причин. В частности, хотя радиовысотомеры и тарируются на низкие высоты, но их погрешности в этом интервале высот возрастают на 20-40%.
Наиболее близким по техническому решению устройством, служащим для измерения высоты ВС над поверхностью Земли, является емкостной высотомер [2].
Чувствительный элемент этого устройства, имеет два электрода, размещенных на носу и на хвосте фюзеляжа самолета, причем они прикрепляются к фюзеляжу через диэлектрические стержни (при этом электроды могут быть расположены и на крыльях ВС). Изменение высоты полета приводит к изменению емкости системы электроды - самолет - Земля. Эти изменения емкости преобразуются в электрический сигнал с помощью компенсационно-мостового измерительного устройства (КМИУ), позволяющего измерить приращение емкости до 10-6 пФ без выполнения дополнительных измерений и без последующей математической обработки сигнала.
Недостатком устройства является малая точность измерения высоты с помощью емкостного чувствительного элемента, состоящего только из двух прикрепленных к фюзеляжу электродов.
Известно, что емкостные датчики подвержены влиянию различного рода дестабилизирующих факторов (например, метеорологических, и, кроме того, сигнал с датчика зависит от проводящих свойств поверхности реагирования. При изменении проводимости воздуха от 0,2˙10-15 до 0,2˙10-9 см/Ом чувствительность датчика изменяется на 20%. Изменение проводимости среды в 1010 раз уменьшает Δ С (приращение емкости) примерно вдвое. Проводящая среда экранирует датчик. В наибольшей степени на показание двухэлектродного датчика влияет изменение влажности среды. Экспериментальные исследования показывают, что изменения емкости могут составить:
При изменении влажности до 98% от 2-5%
При изменении давления от 53 до 106 кПа 0,5-2%
При изменении температуры от (-40оС) до (+60оС) 0,5-1,5%
Известно, что величина приращения емкости чувствительного элемента как функция расстояния до преграды определенным образом зависит от рабочей частоты и физических свойств поверхности реагирования. Для полупроводящей среды (сухого грунта) для одной и той же высоты над поверхностью реагирования приращение емкости уменьшается с ростом частоты и причем весьма существенно. В то же время для металлической поверхности и идеального диэлектрика (бетона) чувствительность датчика практически не зависит от частоты.
В связи с перечисленными фактическими данными двухэлектродный емкостной датчик не может выдавать точную информацию о высоте воздушного судна (ВС) над поверхностью реагирования (из-за влияния дестабилизирующих метеорологических условий и физических условий поверхности реагирования). Кроме того, принятый за прототип емкостной аналоговый датчик высоты не измеряет скорость изменения высоты, знать которую необходимо с точки зрения навигации ВС.
В цифровой емкостной высотомер, содержащий последовательно соединенные чувствительный элемент, выполненный в виде двух электродов, закрепленных под фюзеляжем воздушного судна (ВС) с помощью опор, выполненных из диэлектрика, преобразователь входных сигналов и блок индикации, дополнительно введены последовательно соединенные второй чувствительный элемент, выполненный также из двух электродов, второй преобразователь входных сигналов, а также блок формирования информационных сигналов о высоте и скорости изменения высоты воздушного судна, причем электроды второго чувствительного элемента закрепляются под фюзеляжем ВС на диэлектрических опорах на расстоянии от фюзеляжа ВС, вдвое меньшем расстояния закрепления первой пары электродов, при этом выходы первого и второго преобразователей входных сигналов подсоединены к соответствующим входам блока формирования информационных сигналов о высоте и скорости изменения высоты воздушного судна, а выход подключен к входу блока индикации. При этом блок формирования информационных сигналов содержит два дифференцирующих устройства, ключ, арифметическое устройство, состоящее из трех делителей, запоминающее устройство, элемент вычитания, четвертый и пятый делители и согласующее устройство, причем первый вход блока формирования информационных сигналов о высоте и скорости изменения высоты воздушного судна присоединены к первому входу арифметического устройства и через первое дифференцирующее устройство - к второму входу арифметического устройства, второй вход подсоединен к третьему входу арифметического устройства, первый выход которого подключен к первому входу элемента вычитания, а также через последовательно соединенные ключ и запоминающее устройство - к второму входу элемента вычитания, выход запоминающего устройства подсоединен также и к первому входу четвертого делителя, выход элемента вычитания подсоединен к второму входу четвертого делителя, выход которого подключен к первым входам согласующего устройства и пятого делителя, второй выход арифметического устройства подключен к второму входу пятого делителя, выход которого подключен к второму входу согласующего устройства, причем выход согласующего устройства, является в то же время и выходом блока формирования информационных сигналов о высоте и скорости изменения высоты воздушного судна.
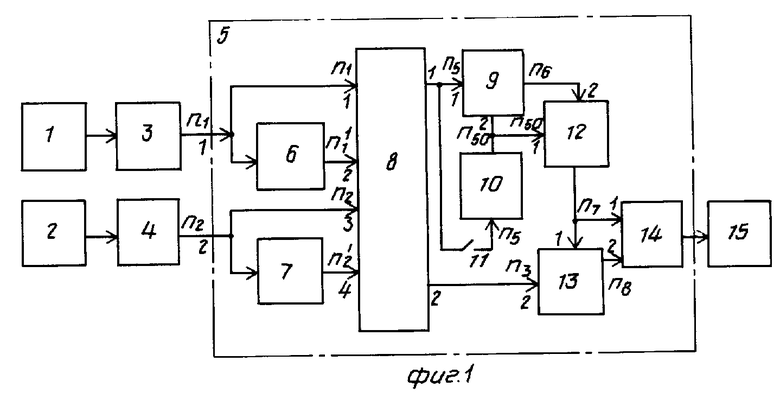
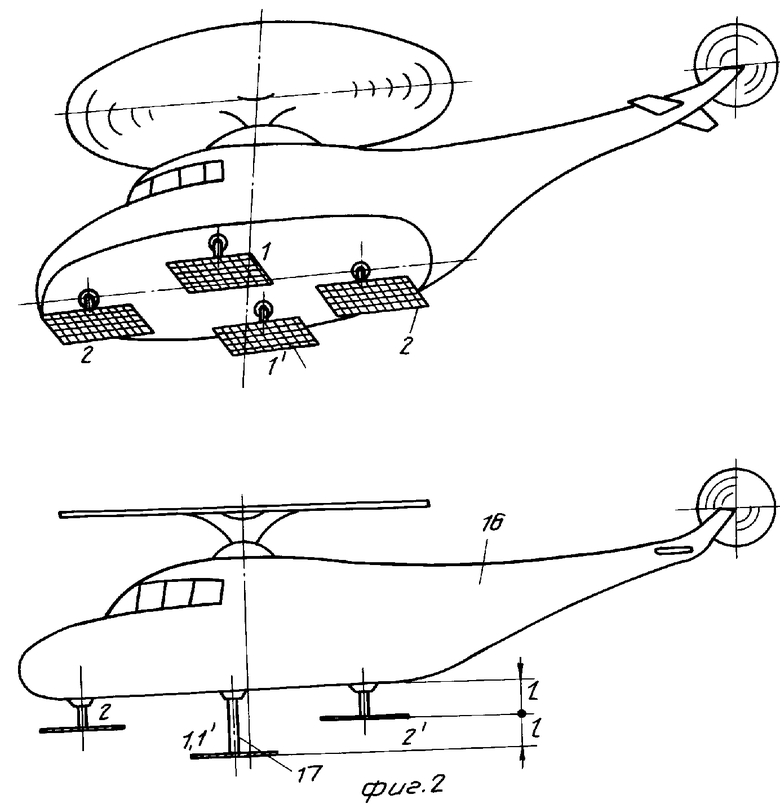
На фиг. 1 представлена функциональная схема цифрового емкостного высотомера; на фиг. 2 - конструктивная схема (один из вариантов) размещения электродов чувствительного элемента под фюзеляжем вертолета; на фиг. 3 - один из вариантов практической реализации блока формирования информационных сигналов; на фиг. 4 - временные диаграммы работы дифференцирующего устройства; на фиг. 5 - блок-схемное выполнение арифметического устройства.
Цифровой емкостной высотомер (см. фиг. 1) содержит два двухэлектродных чувствительных элемента (ЧЭ) 1 и 2, два преобразователя входных сигналов 3 и 4, блок 5 формирования информационных сигналов о высоте и скорости изменения высоты воздушного судна, который содержит два дифференцирующих устройства 6 и 7, арифметическое устройство 8, элемент вычитания 9, запоминающее устройство 10, ключ 11, четвертый и пятый делители 12 и 13 и согласующее устройство 14, а также блок индикации 15.
На фиг. 2-1 и 1' - электроды первого чувствительного элемента (ЧЭ1); 2 и 2' - электроды второго чувствительного элемента (ЧЭ2); 16 - вертолет; 17 - диэлектрические опоры, крепящие электроды ЧЭ к днищу фюзеляжа ВС (в данном случае вертолета).
На фиг. 3-1 и 2 - первый и второй чувствительные элементы (ЧЭ1 и ЧЭ2); 3 и 4 - первый и второй измерительные преобразователи (преобразователи емкости и формирователи импульсов); 14 - согласующее устройство; 15 - блок индикации; 18 - двоичные счетчики; 19-22 - буферные регистры; 23 и 24 - линии задержки; 25 - устройство управления буферными регистрами; 26 - генератор тактовых импульсов опроса; 27 - формирователь импульсов; 28 - передатчик импульсов; 29 - микропроцессор; 30 - постоянное запоминающее устройство; 31 - генератор тактовых импульсов микропроцессора; 32 - устройство формирования импульсов управления работой микропроцессорного блока; 33 - выходной регистр для хранения информации о расстоянии (высоте); 34 - выходной регистр для хранения информации о скорости.
Арифметическое устройство (см. фиг. 5) содержит первый делитель 35, второй делитель 36 и третий делитель 37.
Как видно из фиг. 2, каждый чувствительный элемент имеет два электрода 1,1' и 2,2' произвольной формы. Первая пара электродов подвешена к днищу фюзеляжа ВС на более длинных стержнях, изготовленных из диэлектрического материала, вторая пара электродов 2 и 2' (ЧЭ2) подвешена на расстоянии от днища фюзеляжа ВС в два раза меньшем (l/2), чем первая пара (на расстоянии l). Линии, соединяющие центры электродов 1 и 1',2 и 2' взаимно перпендикулярны. В общем случае это необязательно. Обязательным является разная удаленность этих линий от днища фюзеляжа ВС.
Чувствительный элемент (ЧЭ2) 1 (см. фиг. 1) через преобразователь входных сигналов 3 подключен к первому входу блока 5, к второму входу блока 5 через преобразователь входных сигналов 4 подключен чувствительный элемент (ЧЭ2) 2. Первый вход блока 5 подсоединен к первому входу арифметического устройства 8 и через первое дифференцирующее устройство 6 - к второму входу арифметического устройства 8, второй вход блока 5 подсоединен к третьему входу арифметического устройства 8, первый выход арифметического устройства 8 подключен к первому входу элемента вычитания 9, а также через последовательно соединенные ключ 11 и запоминающее устройство 10 - к второму входу элемента вычитания 9; выход запоминающего устройства 10 подсоединен также и к первому входу четвертого делителя 12, выход элемента вычитания 9 подсоединен к второму входу четвертого делителя 12, а его выход - к первым входам согласующего устройства 14 и пятого делителя 13, второй выход арифметического устройства 8 подключен к второму входу пятого делителя 13, а выход последнего - к второму входу согласующего устройства 14, выход согласующего устройства 14 является выходом всего блока формирования информационных сигналов, который подсоединен к входу блока индикации 15.
Наиболее приемлемой реализацией преобразователей 3 и 4 (см. фиг. 1) является мостовая или компенсационно-мостовая схемы. Все компенсационно-мостовые измерительные устройства (КМИУ), выполненные в виде измерительных преобразователей, не имеют собственных блоков питания и отсчетных устройств. Носителем выходного параметра является напряжение постоянного тока в аналоговых КМИУ и параллельный двоичный код - в цифровых.
Цифровой емкостной высотомер работает следующим образом. На выходах преобразователей входных сигналов 3 и 4 (см. фиг. 1) формируются сигналы, пропорциональные расстоянию от электродов 1,1' и 2,2' (см. фиг. 2) чувствительных элементов 1 и 2 (ЧЭ1 и ЧЭ2 фиг. 1 и 2) до подстилающей поверхности (поверхности реагирования)
U1= K и U2= K
и U2= K (1) или, если обработка сигналов осуществляется в цифровой форме,
(1) или, если обработка сигналов осуществляется в цифровой форме,
n1= K и n2= K
и n2= K , (2) где n1 и n2 - количество счетных импульсов, приходящих на каждый такт измерения и формируемых на выходах преобразователей входных сигналов 3 и 4 соответственно;
, (2) где n1 и n2 - количество счетных импульсов, приходящих на каждый такт измерения и формируемых на выходах преобразователей входных сигналов 3 и 4 соответственно;
A1 и A2 - коэффициенты, зависящие от формы электродов ЧЭ1 и ЧЭ2, состояния среды и параметров поверхности реагирования (подстилающей поверхности), на которую осуществляется посадка летательного аппарата (воздушного судна);
Х - расстояние до поверхности реагирования (например, до поверхности Земли) от электродов ЧЭ1;
l - смещение по высоте (относительно поверхности реагирования) электродов первого и второго чувствительных элементов (ЧЭ1 и ЧЭ2).
Цифровые сигналы n2 и n1 поступают на дифференцирующие устройства (ДУ) 6 и 7 соответственно, на выходе которых формируются цифровые сигналы:
n = K
= K = K
= K = - K3·K1·
= - K3·K1·  v (3)
v (3)
n = K
= K = -K4·K
= -K4·K v, (4) где v - скорость посадки ВС;
v, (4) где v - скорость посадки ВС;
К3 и К4 - коэффициенты преобразования дифференцирующих устройств 6 и 7 соответственно.
Сигналы n1, n1', n2 и n2' поступают соответственно на входы 1, 2, 3 и 4 арифметического устройства 8. На первом такте осуществляется деление сигналов n1 на n1', (делитель 35), а также сигналов n2 на n2' (делитель 36). Таким образом, формируются следующие цифровые сигналы:
n3=  = -
= -  ·
·  ; (5)
; (5)
n4=  = -
= -  ·
·  (6)
(6)
Сигналы n3 и n4 поступают на делитель 37 арифметического устройства 8, где формируется следующего вида сигнал:
n5=  = K
= K 1 +
1 +  = n50+n
= n50+n , (7) где K5=
, (7) где K5=  = n50 - коэффициент (постоянная информация).
= n50 - коэффициент (постоянная информация).
Этот сигнал поступает на первый выход арифметического устройства 8. При этом на втором его выходе формируется сигнал с выхода делителя 35.
На больших высотах, когда х велико, начальная величина n5 = n50 = К5 запоминается в запоминающем устройстве 10. Когда же начинается посадка, ключ 11 размыкается и запоминающее устройство 10 хранит постоянную информацию n50.
Сигнал n5 с первого выхода арифметического устройства 8 (здесь и далее разбирается режим посадки ВС) поступает на первый вход элемента вычитания 9, на второй вход которого поступает сигнал n50 с запоминающего устройства 10. На выходе элемента вычитания 9 формируется сигнал
n6 = n5 - n50 = n50 . (8)
. (8)
Сигнал с выхода запоминающего устройства 10 поступает также и на первый вход четвертого делителя 12, где делится на сигнал n6, поступающий на второй вход данного делителя 12. В результате этого действия на выходе делителя 12 формируется следующий цифровой сигнал:
n7=  =
=  (9)
(9)
Сигнал n7, пропорциональный высоте полета воздушного судна (ВС), после обработки в согласующем устройстве 14 поступает в блок индикации 15. Одновременно сигнал n7 поступает на первый вход пятого делителя 13, где он делится на сигнал n3, поступающий с второго выхода арифметического устройства 8 на второй вход пятого делителя 13. На выходе данного делителя 13 формируется сигнал
n8=  = -K
= -K (10) линейно связанный со скоростью посадки (скоростью изменения высоты ВС). Этот сигнал после прохождения через согласующее устройство 14 поступает в блок индикации 15.
(10) линейно связанный со скоростью посадки (скоростью изменения высоты ВС). Этот сигнал после прохождения через согласующее устройство 14 поступает в блок индикации 15.
Все элементы блока формирования информационных сигналов 5 могут быть реализованы в виде арифметическо-логического устройства на базе малой вычислительной машины типа ДВК-2 либо сформированы с использованием микросхем серий К155, К580, КМ531, К573.
В качестве примера такой реализации рассмотрим устройство, структурная схема которого приведена на фиг. 3, где одно арифметико-логическое устройство в соответствии с сигналами управления последовательно выполняет математические операции по обработке информации. В связи с этим состав элементов структурной схемы фиг.3 несколько отличается от состава структурной схемы фиг. 1, хотя принцип обработки информации остается тем же.
Работает высотомер по фиг. 3 следующим образом. При включении высотомера устройство управления буферными регистрами 19-22 начинает формировать управляющие импульсы для записи выходной информации с двоичных счетчиков 18 в эти буферные регистры (19-22). Управляющие импульсы поступают поочередно по шинам "б" и "в" соответственно в регистры 19, 21 и 20, 22. Частота следования этих импульсов определяется частотой генератора 26 и выбирается из двух условий: разрядности двоичных счетчиков 18, т.е. исходя из объема входной информации, и времени реализации высотомером алгоритма определения высоты и скорости посадки. Длительность этих импульсов регулируется формирователем импульсов 27 и составляет 35-40 мс, что вполне достаточно с точки зрения длительности сигнала управления и обеспечивает точную (без пропусков импульсов) работу счетчиков 18.
Блоки 3 и 4 - измерительные преобразователи (преобразователи емкости и формирователи импульсов) формируют частотно-зависимую (от величины емкости) последовательность импульсов на основе тех величин емкостей, которые задаются электродами чувствительных элементов 1 и 2. Эта последовательность импульсов и считается двоичными счетчиками 18. Период работы счетчиков определяется временем, проходящим между импульсами обнуления (поступающими на счетчики 18 по шине "г" через линию задержки 23, необходимую для исключения возможности искажения информации при записи в регистры 19-22). Выходная информация со счетчиков 18 пропорциональна величинам n1 и n2 (формула 2). Необходимость поочередной записи пачек импульсов соответственно в регистры 19 и 20, 21 и 22 определяется алгоритмом нахождения величин n1' и n2' (по формулам 3 и 4), который заключается в следующем (см. фиг. 4): =
=  ; Δt =
; Δt =  +
+  =
=  = T0;
= T0; ≈
≈  =
=  ≈
≈  ; Tcp1=
; Tcp1=  ; Tcp2=
; Tcp2=  ;
;
fcp1=  =
=  ; fcp2=
; fcp2=  =
=  ;
; =
=  =
=  =
=  ... (11)
... (11)
Из приведенных аналитических выкладок можно заметить, что для нахождения одной из величин n1' или n2' необходимо знать величину n1 или n2, вычисленную за предыдущий и последующий интервалы опроса, т.е. N1 и N2, а величина интервала опроса То определяется генератором 26 и равна периоду следования его импульсов.
После того, как в очередном такте выходная информация счетчиков 18 будет записана в соответствующие регистры 19-22, по шине "д" в блоки 32 и 31 поступает импульс, определяющий начало работы микропроцессорного блока. Микропроцессорный блок состоит из элементов 28-32 и работает следующим образом. По сигналу, поступающему с линии задержки 24, блоки 32 и 31 формируют управляющие сигналы, определяющие начало работы микропроцессора 29. Микропроцессор 29, согласно поступившим командам (записанным в ПЗУ 30 - постоянное запоминающее устройство) формирует управляющие сигналы, с помощью которых он считывает информацию с регистров 19-22 через передатчик (линию задержки) 28, реализует алгоритм определения значений высоты и скорости ее изменения и записывает полученную информацию в выходные регистры 33 и 34. Элемент схемы 31 (генератора тактовых импульсов микропроцессора) обеспечивает при этом синхронизацию работы микропроцессора. ПЗУ хранит команды, реализующие алгоритм работы высотомера (формулы 1-11) и константы. Элемент схемы 32 (устройство формирования импульсов управления работой микропроцессора) в соответствии с командами, поступающими с микропроцессора 29, и с внешним управляющим сигналом, формирует последовательность управляющих импульсов, предназначенных для реализации алгоритма вычисления высоты ВС над поверхностью Земли и скорости ее изменения. Промежуточная информация хранится в регистрах общего назначения микропроцессора 29. Элементы 14 и 15 схемы (согласующее устройство и блок индикации, соответственно) осуществляют согласование и индикацию цифровой информации о значениях высоты ВС над землей и скорости ее изменения. Блоки и элементы, входящие в состав структурной схемы высотомера, могут быть реализованы на базе следующих микросхем малой и средней степени интеграции (см. фиг. 3): 18-К 155 ИЕ7; 19-22, 28, 33, 34-К580 ИР82; К580 ИР83, 26-КМ531 ГГ1; 27-К155 АГ1; 19-К580 ВМ80А; 31-К580 ГФ 4; 15-К573 РФ4 (К556 РТ4).
Повышение точности измерения высоты и скорости изменения высоты ВС над поверхностью Земли в данном устройстве достигается за счет использования разноуровневого размещения под фюзеляжем ВС двух пар электродов (двух чувствительных элементов) и последующей совместной цифровой обработки сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ ВОДНО-СПИРТОВОГО РАСТВОРА | 1994 |
|
RU2135993C1 |
| ДАТЧИК ВЕКТОРА НАПРЯЖЕННОСТИ ЭЛЕКТРИЧЕСКОГО ПОЛЯ В ПРОВОДЯЩЕЙ СРЕДЕ | 1991 |
|
RU2012894C1 |
| УСТРОЙСТВО ВЫСОКОЧАСТОТНОГО ВОЗБУЖДЕНИЯ ГАЗОВОГО ЛАЗЕРА | 1995 |
|
RU2113750C1 |
| ГАЗОВЫЙ ЛАЗЕР | 1996 |
|
RU2113751C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОГИЧЕСКОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЧЕТНОСТИ | 1990 |
|
RU2025758C1 |
| ГАЗОВЫЙ ЛАЗЕР | 1996 |
|
RU2113752C1 |
| СПОСОБ ОТДЕЛОЧНОЙ ОБРАБОТКИ ЗУБНЫХ ПРОТЕЗОВ ИЗ КОРРОЗИОННО-СТОЙКОЙ СТАЛИ | 1996 |
|
RU2103944C1 |
| Устройство для контроля параметров видеомагнитофона | 1990 |
|
SU1727171A1 |
| Устройство определения углового положения точечных излучателей | 1991 |
|
SU1817860A3 |
| Устройство для контроля окружного шага зубчатых колес | 1989 |
|
SU1742619A1 |



Изобретение относится к устройствам измерения высоты воздушного судна над поверхностью Земли /на малых высотах/ и скорости ее измерения. Целью изобретения является повышение точности изменения высоты за счет совместной цифровой обработки сигналов, поступающих от разнесенных на разные уровни по высоте чувствительных элементов. Для этого в цифровой емкостной высотомер, содержащий чувствительный элемент, выполненный в виде двух электродов, закрепленных под фюзеляжем воздушного судна с помощью опор из диэлектрика на заданном расстоянии по отношению к днищу фюзеляжа, а также преобразователь входных сигналов и блок индикации, введены второй чувствительный элемент, выполненный в виде двух электродов, расположенных под фюзеляжем воздушного судна на диэлектрических опорах на расстоянии в два раза меньшем расстояния закрепления первого чувствительного элемента, второй преобразователь входных сигналов блок формирования информационных сигналов о высоте и скорости изменения высоты воздушного судна. При этом блок формирования информационных сигналов, содержит два дифференцирующих устройства, арифметическое устройство, состоящее из трех делителей, элемент вычитания, запоминающее устройство , ключ,четвертый, пятый делители и согласующее устройство. 1 з.п. ф-лы, 5 ил.
| Грохольский А.А | |||
| и Ляшенко В.Н | |||
| Принципы построения емкостного высотомера малых высот | |||
| Авиационные приборы, метрология и метод измерения./Межвузовский сборник научных трудов Киевского института инженеров гражданской авиации Министерства гражданской авиации СССР, вып.1, Киев, 1975, с.5-8. |
