Изобретение относится к электротехнике и может быть использовано для управления преимущественно быстродействующими электродвигателями постоянного тока, а также бесколлекторными (синхронными) электродвигателями.
Известен способ широтно-импульсного регулирования напряжения на якоре двигателя по системе ШИП-Д (широтно-импульсный преобразователь-двигатель) [1] , по которому функцию выпрямления напряжения выполняет неуправляемый выпрямитель, собранный чаще всего по трехфазной мостовой схеме. Выпрямленное напряжение сглаживается емкостным либо индуктивно-емкостным фильтром. Для согласования напряжения сети и входного напряжения выпрямителя используется силовой трехфазный трансформатор. Функцию регулирования напряжения на якоре двигателя в ШИП выполняет импульсный усилитель мощности (ИУМ) с несимметричным алгоритмом коммутации, состоящий из силовых транзисторных ключей, соединенных по мостовой схеме.
Известно устройство для широтно-импульсного регулирования напряжения на якоре двигателя по системе ШИП-Д [1], содержащее силовой трансформатор, неуправляемый диодный выпрямитель, сглаживающий фильтр и силовые транзисторные ключи, соединенные по мостовой схеме.
Недостатком известного устройства является высокий уровень пульсаций тока якоря, особенно в зоне прерывистых токов, что приводит к возникновению пульсаций скорости, увеличению потерь в двигателе, снижению КПД. Наличие сетевого трансформатора снижает массогабаритные показатели устройства.
Наиболее близким к заявляемому является устройство для широтно-импульсного регулирования напряжения на якоре двигателя (тока якоря) по системе ШИП-Д [2], содержащее бестрансформаторный силовой источник питания, выполненный на базе импульсного преобразователя напряжения, выход которого через силовые транзисторные ключи ИУМ связан с якорем электродвигателя.
Недостатком известного устройства также является высокий уровень пульсаций тока якоря и, как следствие, возникновение режима прерывистых токов при малых нагрузках, что приводит к появлению нелинейностей на соответствующих участках электромеханических характеристик, а также к увеличению пульсаций скорости и росту потерь в двигателе. Снижение уровня пульсаций за счет повышения частоты коммутации ШИП (выше 10 кГц) не приносит значительного эффекта, так как ведет к увеличению потерь в меди и стали двигателя. Кроме того, существенно повышается уровень ВЧ-помех, излучаемых двигателем и силовыми питающими цепями.
Цель изобретения - снижение пульсаций скорости электродвигателя в двигательном режиме за счет уменьшения пульсаций тока якоря.
Цель достигается тем, что в устройство управления электродвигателем, содержащее задатчик управляющего сигнала, датчик тока якоря электродвигателя, импульсный преобразователь напряжения, выполненный в виде транзисторного инвертора со схемой управления инвертором, двумя выпрямителями и фильтрами, причем выход каждого фильтра подключен к соответствующему входу блока силовых ключей, выход которых предназначен для соединения с якорем электродвигателя, введена схема формирования сигналов управления, при этом выход датчика тока якоря электродвигателя подключен к первому входу схемы формирования сигналов управления, второй вход которой соединен с выходом задатчика управляющего сигнала, а выходы схемы формирования сигналов управления подключены к входам схемы управления инвертором импульсного преобразователя напряжения и к управляющим входам блока силовых ключей.
Введение схемы формирования сигналов управления позволяет изменять уровень выходного квазипостоянного напряжения импульсного преобразователя напряжения, т.е. питать двигатель практически постоянным током, и тем самым, снизить пульсации скорости в двигательном режиме работы за счет уменьшения пульсаций тока якоря. Уменьшение пульсаций тока якоря позволяет увеличить КПД за счет снижения потерь в меди и стали двигателя.
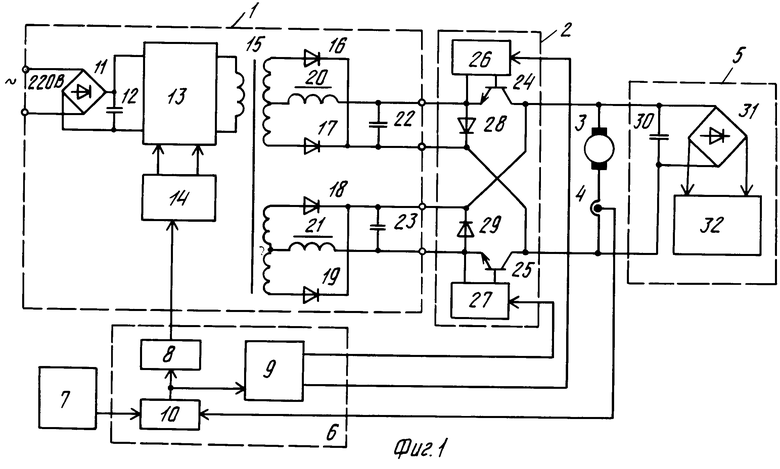
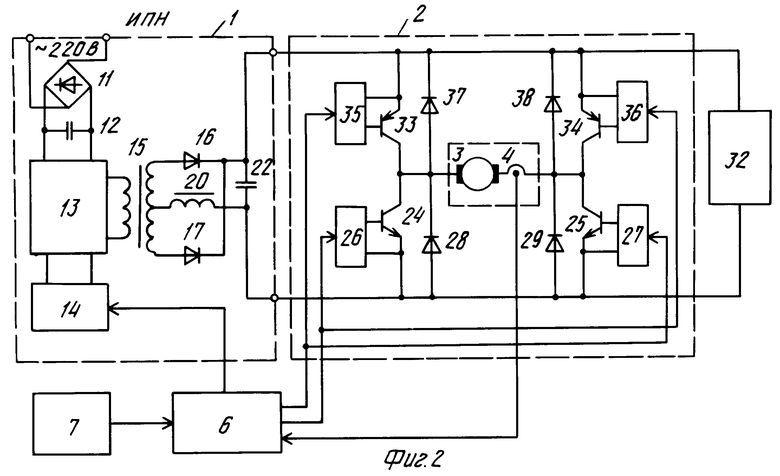
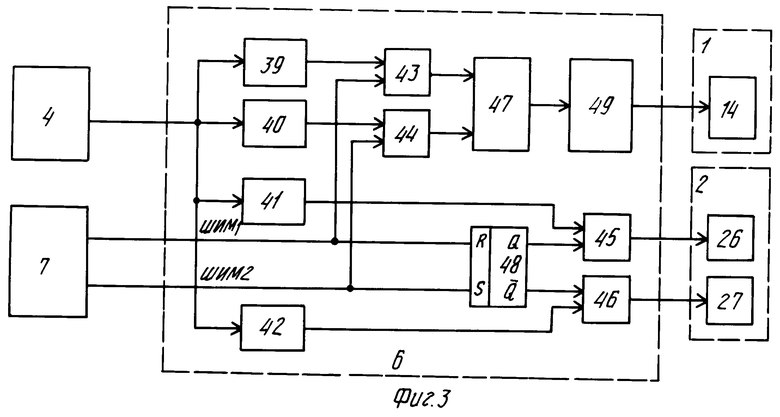
На фиг.1 изображена функциональная схема устройства управления электродвигателем (вариант, используемый для аналоговой системы управления); на фиг. 2 изображен вариант реализации блока силовых ключей и связанного с ним выходного выпрямителя в импульсном преобразователе напряжения; на фиг.3 - вариант реализации схемы формирования сигналов управления устройства управления электродвигателем, используемый для цифровой системы управления.
Устройство состоит из импульсного преобразователя 1 напряжения, блока 2 силовых ключей, электродвигателя 3, датчика 4 тока, блока 5 защиты от перенапряжений, схемы 6 формирования сигналов управления, задатчика 7 управляющих сигналов. Схема формирования сигналов управления состоит из схемы 8 выпрямления (детектирования) управляющего сигнала схемы 9 выделения направления и схемы 10 регулятора тока. Импульсный преобразователь 1 напряжения состоит из выпрямительного моста 11, конденсатора 12 сетевого фильтра, полумостового (или мостового) транзисторного инвертора 13 со схемой 14 управления инвертором, согласующего высокочастотного трансформатора 15, выпрямительных диодов 16-19, фильтрующих дросселей 20, 21 и конденсаторов 22, 23 выходных фильтров. Блок 2 силовых транзисторных ключей состоит из силовых ключей 24, 25 с предварительными усилителями 26, 27 и обратными диодами 28, 29. Блок 5 защиты от перенапряжений состоит из фильтрующего конденсатора 30, выпрямительного моста 31 и устройства 32 защиты от перенапряжений.
Блок 2 силовых транзисторных ключей может также состоять (фиг.2) из транзисторных ключей 24, 25, 33, 34 и обратных диодов 28, 29, 37, 38, включенных по мостовой схеме с предварительными усилителями 26, 27, 35, 36. В этом случае выходной выпрямитель импульсного преобразователя 1 напряжения может содержать в два раза меньшее количество элементов, т.е. может быть выполнен на выпрямительных диодах 16, 17, фильтрующем дросселе 20 и конденсаторе 22 выходного фильтра. Блок 2 (фиг.1) с двумя силовыми транзисторными ключами 24, 25 обладает более высоким КПД, поэтому может быть рекомендован при больших токах нагрузки для снижения потерь в блоке 2.
Блок 2 силовых транзисторных ключей, датчик 4 тока, устройство 32 защиты от перенапряжений и схема 10 регулятора тока могут быть выполнены соответственно аналогично силовым ключам, датчику тока, устройству защиты от перенапряжений и устройству токоограничения с регулятором тока, используемым в схеме ШИП-Д.
Схема 9 выделения направления может быть выполнена на компараторах (например, серии К552САЗ), настроенных соответственно на положительный и отрицательный уровни сигнала управления (Uупр), поступающего с выхода схемы регулятора тока.
При использовании заявляемого устройства для построения аналоговой системы управления электродвигателем постоянного тока в качестве задатчика 7 управляющих сигналов может быть использован регулятор скорости, цифроаналоговый преобразователь или задающий потенциометр.
В качестве схемы 8 выпрямления (детектирования) управляющего сигнала может быть использован двухполупериодный детектор с заземленным входом.
В качестве инвертора 13 может быть использована двухтактная транзисторная полумостовая (или мостовая) схема.
В качестве схемы 14 управления инвертором может быть применена интегральная микросхема, используемая в импульсных вторичных источниках питания (например КР1114УУЕУ4). При этом вместо традиционно подаваемого опорного напряжения на неинвертирующий вход операционного усилителя (первый вывод) в данном случае подается напряжение управления (управляющий сигнал).
При использовании заявляемого устройства для построения цифровой системы управления электродвигателем постоянного тока в качестве задатчика 7 управляющих сигналов (см. фиг. 3) может быть применен широтно-импульсный модулятор. При этом схема 6 формирования сигналов управления может быть выполнена на базе компараторов 39-42 (например, серии К554САЗ), логических схем И 43-46, логической схемы ИЛИ 47, RS-триггера 48 (например, серии К555) и схемы 49 преобразования ширины импульса в напряжение. В качестве схемы 49 могут быть использованы фильтры нижних частот.
Схема работает следующим образом.
С выхода задатчика 7 управляющих сигналов на вход схемы 6 формирования сигналов управления поступает двухполярный управляющий сигнал, задающий направление и скорость вращения электродвигателя. Этот сигнал подается на вход схемы 10 регулятора тока, на второй вход которой поступает сигнал отрицательной обратной связи по току с датчика 4 тока. Регулятор тока позволяет реализовать внутренний контур тока (для системы подчиненного регулирования) либо работу с токовой отсечкой, настроенной на заданный уровень. Выходной сигнал регулятора тока подается на входы схемы 8 выпрямления и схемы 9 выделения направления, определяя таким образом величину и направление тока в якоре электродвигателя. Схема 8 выпрямления осуществляет детектирование (выделение модуля) управляющего сигнала, который затем поступает на вход схемы 14 управления инвертором, управляющей работой импульсного преобразователя 1 напряжения. Силовое напряжение питающей сети выпрямляется диодным мостом 11, сглаживается фильтрующим конденсатором 12 и преобразуется инвертором 13 в переменное напряжение, состоящее из импульсов регулируемой скважности, с частотой порядка 30-100 кГц. Амплитуда этих импульсов с помощью импульсного трансформатора 15, преобразуется (понижается) до номинальной величины, необходимой для питания электродвигателя, что в данном случае составляет 50 В. Импульсный трансформатор 15 имеет две вторичные обмотки со средними точками. Регулируемое по скважности импульсное напряжение выпрямляется диодами 16, 17 и 18, 19, сглаживается LС-фильтрами 20, 22 и 21, 23. Таким образом, с выхода выпрямителей инвертора снимаются два изменяющихся по заданному закону, отфильтрованных (квазипостоянных) напряжения. Одно из этих напряжений в зависимости от выбранного направления подается через соответствующий открытый силовой транзисторный ключ 24 или 25 в цепь якоря электродвигателя. Выбор направления производится с помощью схемы 9 выделения направления, выходные сигналы которой через предварительные усилители 26, 27 управляют открыванием силовых ключей 24, 25 блока 2.
Если блок 2 состоит из четырех транзисторных ключей 24, 25, 33, 34 с предварительными усилителями 26, 27, 35, 36 и обратных диодов 28, 29, 37, 38, включенных по мостовой схеме (фиг.2), то с выхода преобразователя 1 снимается одно изменяющееся по заданному закону, отфильтрованное (квазипостоянное) напряжение. Это напряжение в зависимости от выбранного направления подается через соответствующие открытые силовые транзисторные ключи 24, 34 или 25, 33 в цепь якоря электродвигателя. Выбор направления производится с помощью схемы 9 выделения направления, входящей в состав схемы 6 формирования сигналов управления. Выходные сигналы схемы 9 через предварительные усилители 26, 36 или 27, 35 управляют открыванием силовых ключей 24, 34 или 25, 33 блока 2.
Таким образом, питание якорной цепи осуществляется практически постоянным, изменяемым по заданному закону током. Коэффициент пульсаций тока якоря мал (не превышает 1-2%).
Схема 6 формирования сигналов управления, предназначенная для построения цифровой системы управления электродвигателем постоянного тока, работает следующим образом. Задатчик 7 управляющих сигналов (фиг.3) выдает на один из входов схемы 6 формирования сигналов управления в зависимости от направления вращения двигателя управляющий сигнал, состоящий из модулированных по длительности импульсов частотой 5-10 кГц. Один из этих импульсных сигналов (ШИП1 или ШИМ2) устанавливает логическую "1" на одном из выходов RS-триггера 48. Единичный логический сигнал через одну из схем И 45 или 46 подается на выход схемы 6 и далее поступает на один из импульсных усилителей 26 или 27, определяя направление вращения двигателя 3 путем отпирания силовых транзисторных ключей 24, 34 или 25, 33. Кроме того, один из сигналов (ШИМ1 или ШИМ2) через схему И 43 или 44 и схему ИЛИ 47 поступает на вход преобразователя 49 ширины импульса в напряжение. С выхода преобразователя 49 снимается отфильтрованный сигнал, поступающий на вход схемы 14 управления инвертором управляемого импульсного преобразователя 1 напряжения. Уровень этого сигнала изменяется пропорционально ширине импульса задатчика 7, т.е. пропорционально необходимому изменению выходного напряжения преобразователя 1. Компараторы 39, 40 настроены на величину тока отсечки токовой защиты. Если положительный или отрицательный сигнал, пропорциональный величине тока в двигателе 3, превысит значение тока отсечки, один из компараторов 39 или 40 срабатывает и блокирует прохождение импульса ШИМ-сигнала через соответствующую схему И 43 или 44 до тех пор, пока ток двигателя не уменьшится ниже тока отсечки. Компараторы 41, 42 настроены на срабатывание при токе в двигателе, превышающем значение тока отсечки на 10-20% . Данный режим имеет место, например, при реверсе, когда даже при нулевом напряжении на выходе преобразователя ток, обусловленный собственной ЭДС двигателя, замыкается, например, через открытый транзисторный ключ 24 и диод 28 или через транзисторный ключ 25 и диод 29. При срабатывании компаратора 41 или 42 закрывается соответствующий транзисторный ключ 25 или 26. Импульсы перенапряжения, которые при этом возникают на индуктивности якоря двигателя, поглощаются в блоке 5 защиты от перенапряжения с помощью устройства 32 защиты от перенапряжений.
Изобретение позволяет существенно (примерно на порядок) уменьшить уровень пульсаций тока якоря, особенно в зоне прерывистых токов, что соответственно уменьшает пульсации скорости и увеличивает жесткость электромеханических характеристик двигателя. Это позволяет в свою очередь повысить точность системы автоматического управления, снижает потери в двигателе, увеличивает КПД следящего привода. Отсутствие сетевого пятидесятигерцового трансформатора позволяет улучшит массогабаритные показатели устройства.
Использование: в электротехнике для управления быстродействующими электродвигателями постоянного тока. Цель: снижение пульсаций скорости электродвигателя в двигательном режиме. Сущность изобретения: изменяют уровень выходного квазипостоянного (отфильтрованного) напряжения регулируемого импульсного преобразователя напряжения. Устройство дополнительно содержит схему формирования сигналов управления, входы которой связаны с выходами датчика тока и задатчика управляющих сигналов, а выходы - с управляющими входами импульсного преобразователя напряжения и блока силовых ключей. Снижение пульсаций скорости электродвигателя достигается за счет питания якорной цепи практически постоянным, изменяемым по заданному закону током. 3 ил.
УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ, содержащее задатчик управляющего сигнала, датчик тока якоря электродвигателя, импульсный преобразователь напряжения, выполненный в виде транзисторного инвертора со схемой управления инвертором, двумя выпрямителями и фильтрами, выход каждого фильтра подключен к соответствующему входу блока силовых ключей, выход которых предназначен для соединения с якорем электродвигателя, отличающееся тем, что в него введена схема формирования сигналов управления, выход датчика тока якоря электродвигателя подключен к первому входу сжемы формирования сигналов управления, второй вход которой соединен с выходом задатчика управляющего сигнала, а выходы схемы формирования сигналов управления подключены к входам схемы управления инвертором импульсного преобразователя напряжения и к управляющим входам блока силовых ключей.
