Изобретение относится к электротехнике, в частности к частотно-управляемым электроприводам, и может быть использовано для регулирования скорбсти механизмов, приводимых асинхронными короткозамкнутыми двигателями.
Известно устройство для управления частотно-регулируемым асинхронным электроприводом, реализованное в системе регулирования преобразователя частоты SAM 1, содержащее силовой фильтр, автономный инвертор с шйротнб-импульсным регулированием напряжения, :К выходу которого подключен асинхронный двигатель, задатчик интенсивности, суммирующий усилитель, регулятор ограничения скольжения, вычислительный блок, блок деления, модулятор, генератор пилообразного напряжения, блок задания алгоритма модуля- циМ, кольцевой счетчик, блок логики, усилитель .импульсов, блок датчиков тока, датчик напряжения, датчик действительного значения электромагнитного момента.
Известен частотно-регулируемый асинхронный электропривод, содержащий асин- хронный электродвигатель, подключенный к выходу преобразователя частоты с широт- но-импульсным регулированием напряжения, выполненный в виде последовательно .соединенных выпрямителя, фильтра и ин- вертора, выход которого является выходом преобразователя частоты, а управляющие входы инвертора подключены к выходам блока формирования импульсов, узел задания, подключённый выходом к входу задающего генератора и через блок: регулирования напряжения к первому входу модулятора, блок задания алгоритма модуляции, вход которого соединен с выходом задающего генератора, первый выход блока задания алгоритма моду- ляции подключен к входу кольцевого счетчика, а второй выход блока задания алгоритма модуляции подключен к второму входу модулятора, блок ограничения скольжения, выход которого подключен к основному входу узла
задания, логический блок с двумя входами, первый вход которого подключен к выходу кольцевого счетчика, а выходы соединены с входами блока формирования импульсов, датчика тока, блок ограничения с тремя входами, схема совпадения и первый компаратор, блок задания алгоритма модуляции снабжен третьим выходом, датчик тока включён на вход инвертора преобразователя частоты, первый, второй и третий входы блока ограничения подключены соответственно к третьему выходу блока задания алгоритма модуляции, к выходу модулятора и к выходу первого компаратора, выход блока ограничения подключен к второму входу логического блока и первому входу схемы совпадения, второй вход которой соединен с выходом модулятора, а выход схемы совпадения подключен к входу блока ограничения скольжения, первый вход первого компаратора подключен к выходу датчика тока, а второй вход первого компаратора предназначен для подключения к источнику сигнала задания. .,
Недостатком известного устройства является завышенная установленная мощность, увеличенные масса и габариты инвертора при питании устройств от нестабильной питающей сети, характеризуемой глубокими провалами питающего напряжения.
Цель изобретения-улучшения массога- баритных показателей инвертора в условиях питания от нестабильной питающей сети.
Поставленная цель достигается тем, что в устройство для управления частотно-регулируемым асинхронным электроприводом, содержащее преобразователь частоты с ши- ротно-импульсным регулированием выходного напряжения, выполненный в виде последовательно соединенных выпрямителя, силового фильтра, инвертора и клемм для подключения асинхронного двигателя, управляющие входы подключены к выходу системы управления инвертором, составленной из последовательно соединенных, задающего генератора, блока задания алго-. ритма модуляции, кольцевого счетчика, логического блока и блока формирования импульсов, при этом второй выход блока задания алгоритма модуляции соединен с первым входом модулятора, а второй вход модулятора и вход задающего генератора образуют входы системы управления инвертором, блок регулирования напряжения, снабженный задатчиком напряжения, регулятором напряжения и датчиком напряжения, соединенный своим входом со входом инвертора, вход задатчика напряжения соединен с выходом узла задания и входом задающего генератора, регулятор напряжения подсоединен первым входом к выходу задатчика напряжения, вторым входом - к выходу датчика напряжения, а выходом - к второму входу модулятора, первый компа- ратор , подключенный первым входом к выходу датчика, вторым входом - к первому выходу источника сигнала задания, блок ограничения скольжения,соединенный выходом с входом узла задания, дополнительно первый компаратор снабжен третьим входом, который соединен с выходом задатчика напряжения, а выход компаратора соединен со входом блока ограничения скольжения, модулятор выходом соединен со вторым входом логического блока, датчик тока соединен с выходом выпрямителя,
С целью упрощения регулятор напряжения выполнен в виде последовательно соединенных прерывателя, фильтра и интегрального регулятора, причем один из входов интегрального регулятора, его выход и управляющий вход прерывателя образуют, соответственно, первый вход, выход и второй вход регулятора напряжения, причем управляющий вход прерывателя подключен к выходу модулятора.
С целью сокращения времени торможения в предложенном устройстве вводится второй компаратор, соединенный первым входом с выходом датчика напряжения, вторым входом - со вторым выходом источника сигнала задания, а выходом - с дополнительным входом узла задания.
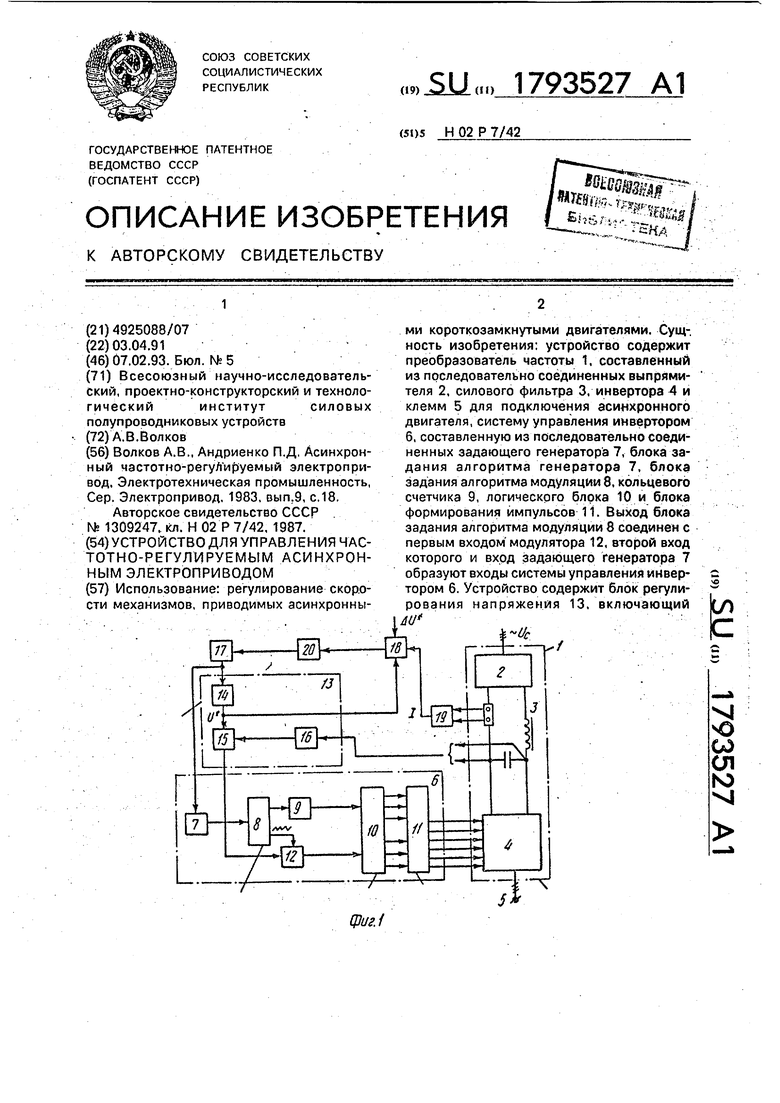
На фиг.1 показана функциональная схема устройства для управления частотно-регулируемым асинхронным электроприводом; на фиг.2-функциональная схема упрощенного устройства; на фиг.З - функциональная схема устройства с сокращенным временем торможения.:
Функциональная схема (фиг.1) устройства для управления частотно-регулируемым асинхронным электроприводом содержит преобразователь частоты 1 с широтно-импульсным регулированием выходного напряжения, состоящий из последовательно соединенных выпрямителя 2, силового фильтра 3, инвертора 4 и клемм 5
для подключения асинхронного двигателя, систему управления инвертором 6, состоящую из последовательно соединенных задающего генератора 7, блока задания алгоритма модуляции 8, кольцевого счетчи0 ка 9, логического блока 10 и блока формирования импульсов 11, в которой второй выход блока задания алгоритма модуляции 8 соединен с первым входом модулятора 12, а второй вход модулятора 12 и вход задающе5 го генератора 7 являются входами системы управления инвертором 6, блок регулирования напряжения 13, содержащий задатчик напряжения 14, регулятор напряжения 15 и датчик напряжения 16, соединенный своим
0 входом с входом инвертора 4, вход задатчика 14 соединен с выходом узла задания 17 и входом задающего генератора 7, регулятор напряжения 15 подсоединён первым входом к выходу задатчика напряжения 14,
5 вторым входом - к выходу датчика напряжения 16, а выходом - ко второму входу модулятора 12, первый компаратор 18, подключенный первым своим входом к выходу датчика тока 19, вторым выходом - к
0 первому выходу источника сигнала задания, блок ограничения скольжения 20, соединенный выходом с основным входом узла задания 17, Первый компаратор 18 снабжен третьим входом, модулятор 12 подключен
5 выходом ко второму входу логического блока 10, вход датчика тока 19 подключен к выходу выпрямителя 2, первый компаратор 18 соединен третьим своим входом с выходом задатчика напряжения 14, а выходом 0 со входом -блока ограничения скольжения 20.
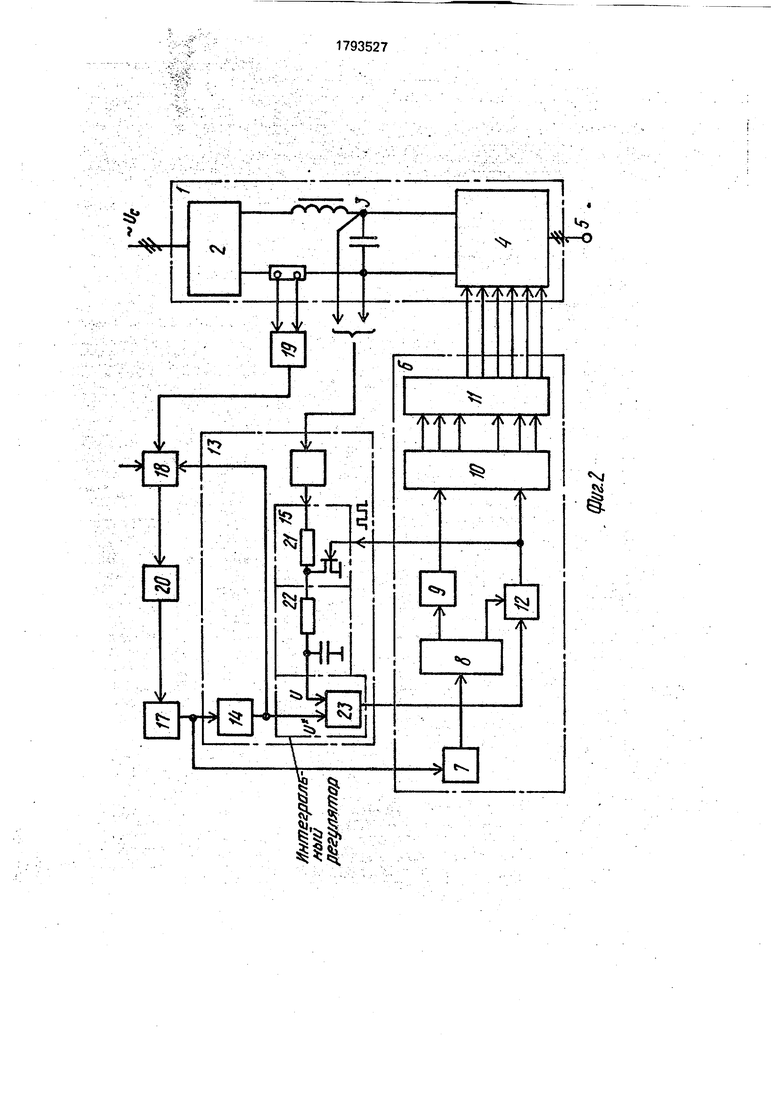
На функциональной схеме упрощенного устройства на фиг .2 регулятор напряжения 15 выполнен в виде последовательно
5 соединенных прерывателя 21, фильтра 22 и интегрального регулятора 23, причем, другой вход и выход интегрального регулятора 23, вход прерывателя 21 является, соответственно, первым входом, выходом и вторым
0 входом регулятора напряжения 15, а управляющий вход прерывателя 21 подключен к выходу модулятора 12.
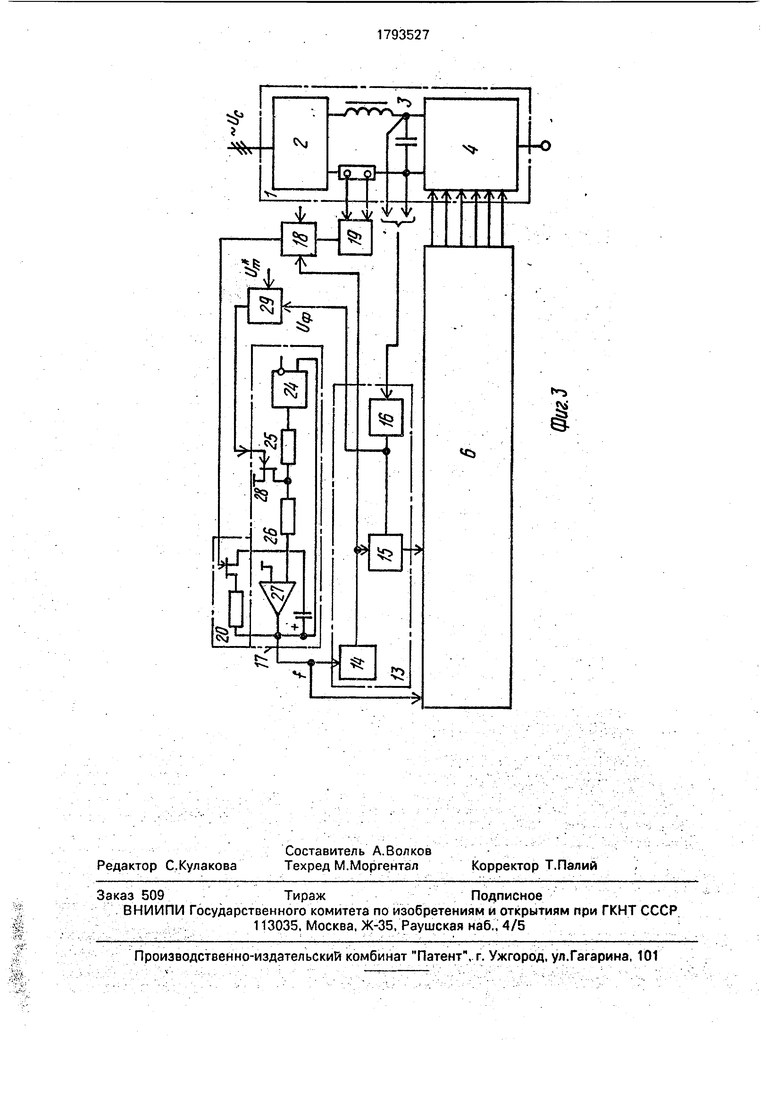
На функциональной схеме устройства с сокращенным временем торможения узел
5 задания 17 снабжен дополнительным входом и выполнен в виде последовательно соединенных второго компаратора 24, первого 25 и второго 26 резисторов, интегратора 27 и ключевого элемента 28, один вывод которого подключен к общей точке
соединения первого 25 и второго 26 резисторов, другой вывод ключевого элемента 28 подключен к общей шине источника сигнала задания, выход интегратора 27 подключен к первому входу второго компаратора 2 и образует выход узла задания 17, второй вход второго компаратора 24 предназначен для подключения к источнику опорного сигнала, а управляющий вход ключевого элемента 28 является дополнительным входом узла задания 17, третий компаратор 29 соединен первым своим входом с выходом датчика напряжения 16, вторым входом - со вторым выходом источника сигнала задания, а своим выходом - с управляющим входом ключевого элемента 28.
Предложенное устройство для управления частотно-регулируемым асинхронным электроприводом (фиг.1) работает следующим образом: с выхода узла задания 17 (например, выполненного в качестве одного из возможных вариантом в виде задатчика интенсивности) на входы задающего генератора 7 и задатчика напряжения 14 поступает сигнал f задания выходной частоты электропривода. Задающий генератор на своем .выходе формирует импульсный сигнал частотой Kit (где Ki 6 - целое число), пропорциональной значению входного сигнала генератора, поступающий на вход блока 8 задания алгоритма модуляции 8, На первом выходе блока 8 формируются узкие импульсы шестикратной частоты 6 f, на втором выходе - сигнал пилообразного опорного напряжения частотой K2f (K2 KI - целое число, задающееся типом алгоритма модуляции). Задатчик напряжения 14 формирует на своем выходе сигнал U задания действующего значения основной гармоники выходного напряжения инвертора 5, связанный со своим входным сигналом f определенным соотношением. Указанное соотношение сигналов U и f, задающееся за датчиком 14, определяет закон частотного управления электродвигателем, в частности: при f - ПОСТОЯНСТВО
потокосцеплёния; U const - постоянство напряжения; Ц f -экономичный закон управления (при этом задатчик 14 выполнен в виде пропорционального звена, ограничителя напряжения или квадратора, соответственно). При необходимости задания большого пускового момента двигателя задатчик напряжения 14 формирует свой выходной сигнал с дополнительной компенсацией (увеличением) на величину падения напряжения на статорных обмотках двигателя. Регулятор напряжения 15 (например, выполненный в качестве одного из возможных вариантов в виде блока д еле. ния) на основе своих входных сигналов, поступающих с выхода задатчика напряжения 15 и с выхода датчика напряжения 16, установленного на входе инвертора 4, задает
своим выходом скважность модуляции выходного напряжения инвертора таким образом, чтобы стабилизировалось значение основной гармоники выходного напряжения инвертора 4 на уровне заданного значе0 ния U независимо от колебаний напряжения питающей сети Uc.
Модулятор 12, на входах которого сравниваются пилообразное опорное напряжение, поступающее со второго выхода блока
5 8 и сигнал с выхода регулятора 15, формирует на своем выходе импульсный сигнал, задающий состояниями лог. О и лог. 1 временные интервалы проводящего и непроводящего состояний силовых ключей ин0 вертора. Посредством кольцевого счетчика 9 и логического блока 10 в системе управления 6 формируются импульсы для управления силовыми ключами инвертора, которые посредством блока формирования импуль5 сов 11 усиливаются,гальванически разделяются и подаются на управляющие переходы силовых ключей (тиристоров, транзисторов) инвертора .4. В преобразователе частоты 1 входное переменное напряжение питаю0 щей сети выпрямляется посредством вы- .прямителя 2, сглаживается силовым фильтром 3 и инвертируется из постоянного в переменное выходное напряжение заданной выходной частоты f с заданным дейст5 вующим U основной гармоники напряжения инвертором 4. При этом в асинхронном двигателе, подключенной к выходным клеммам 5 инвертора 4, задаются заданные режим работы (установившийся
0 режим, разгон или торможение -в зависимости от постоянного или изменяющегося сигнала задания частоты f ). величины электромагнитного момента и магнитного потока двигателя (в зависимости от соотношения
5 сигналов задания частоты f и напряжения основной гармоники U ;.
При отсутствии больших токовых перегрузок электропривода, сигнал I датчика -тока 19, поступающий на один из входов
0 компаратора 18. не превышает суммы сигналов ( Ли), поступающих на другие входы компаратора 18 с выходов задатчика напряжения 14 и источника сигнала задания; при этом выходные сигналы, компара5 тора 18 и блока ограничения скольжения 20 равны нулю, отсутствует воздействие блока 20 на основной вход узла задания 17.
В режиме больших токовых перегрузок электропривода, возникающих к интенсивных динамических режимах разгона или при
приложении больших моментов статических нагрузок, на входе компаратора 18 сигнал I датчика тока 19 достигает значения суммы (U + Ди ) сигналов, поступающих на другие входы компаратора 18, вследст- вие этого устанавливается положительный сигнал на выходе компаратора 18, который воздействует через блок ограничения скольжения 20 на основной вход узла задания 17 (например, вход интегратора при рассмот- ренном варианте выполнения узла 17), уменьшая выходной сигнал задания частоты узла задания 17. Блок ограничения скольжения 20, выполненный например, в виде пропорционального, инерционного, интег- рального звена или ключевого элемента, формирует на выходе сигнал требуемой полярности и мощности, обеспечивающий быстродействующее изменение (уменьшение) выходного сигнала узла задания 17. В ре- зультате этого в динамических режимах разгона снижается темп увеличения частоты f и напряжения U преобразователя частоты 1, а следовательно, уменьшаются значения скольжения, статорного тока, электромаг- нитного момента двигателя.t
При этом, во-первых, в преобразователе частоты с широтно-импульсным регулированием выходного напряжения значение выходного тока I неуправляемого выпрями- теля 2 пропорционально (при неизменном напряжении питающей сети) общей (потребляемой) активной мощности PZ, состоящей из рассеиваемой мощности в виде потерь (в силовом фильтре АР, инверторе и двигателе ДРд) и из развиваемой электромагнитной мощности Рд двигателем:
I РЈ А Р + Д Рд .(1) Во-вторых сигнал и задания действую- щего значения основной гармоники выходного напряжения инвертора (при статическом и быстродействующем контуре регулирования напряжения, реализованном на блоке 13), в режиме работы на неиз- менном токоограничении (с максимальным значением выходного тока I для преобразователя. 1) - пропорционален заданной мак- симально:допустимой активной мощности
Р электропривода, состоящей из потерь
мощности ДРд в инверторе и двигателе и из электромагнитной мощности , развиваемой двигателем:
ДРд (2) (где f и М - соответственно, текущее значе- ние выходной частоты и предельное допустимое максимальное значение электромагнитного момента двигателя, соответствующее заданному токовому огра0 5 0 5
0 5
5
0
ничению I электропривода, U - фактическое действующее значение основной гармоники выходного напряжения инвертора). В-третьих, сигнал Ди , формируемый на выходе источника сигнала задания, задается пропорциональным активной мощности ДР.рассеиваемой в виде потерь в силовом фильтре в режиме работы на токоограничении (с максимальным значением I выходного тока):
const Д (3) С учетом вышеизложенного, в режиме токовых перегрузок электропривода (при воздействии выходного сигнала компаратора 18 через блок ограничения скольжения 20 на основной вход узла задания 17) поддерживается следующее соотношение фактической и заданной мощностей
Р2 Р + (4) что означает в предложенном устройстве осуществление ограничения максимальных текущих значений электромагнитной мощности Рд, электромагнитного момента М и тока I двигателя на уровне предельно-допустимых максимальных значений (из условия заданной коммутационной способности инвертора):
Рд (РЕ - ДР ) - ДРд Рд
(5)
I I
При таком управлении в устройстве осуществляется близкий к предельному по быстродействию режим разгона с ограничением электромагнитной мощности (момента, тока) на уровне максимально допустимой величины (из условия установленной коммутационной способности инвертора 4 преобразователя 1).
Рассмотрим работу предложенного устройства (фиг.1) при питании преобразователя частоты 1 от нестабильной питающей сети, характеризующейся кратковременными (длительностью до 1,5 с) глубокими провалами питающего напряжения (например, до 0,7 от номинального значения UH питающего напряжения сети). В режиме изменяющегося напряжения Uc питающей сети выходной сигнал 1 датчика тока выпрямителя 2 связан с общей потребляемой мощностью Р2 следующим соотношением: Uc
PZ I
Ш
(6)
С наступлением провала питающего напряжения сети (например, с 0,85 U до 0,7 UH) в режиме токоограничения электропривода компаратором 18 (воздействием через блок
20 на основной вход узла 17) поддерживается на его входах равенство сигналов:
I U + ДО
С учетом выражения (6) тому же значению тока I выпрямителя 2 при пониженном напряжении сети соответствует меньшее значение мощности (а именно меньшее в
0.85 0,7
1,2 раз). Это означает, что при провале питающего напряжения сети автомати- чески в предложенном устройстве снижаются (пропорционально напряжению сети) развиваемые максимальные значения электромагнитной мощности и момента двигателя, а, следовательно, примерно пропорционально уменьшаются выходные токи преобразователя частоты 1. Вследствие этого на время длительности глубокого провала питающего напряжения, когда в преобразователях частоты снижается токовая коммутационная способность (из-за снижения пропорционально напряжениюсети напряжения на коммутационных конденсаторах в инверторах, выполненных с искусственной коммутацией, или на источниках питания формирователей в инверторах, выполненных на запираемых тиристорах и транзисторах), с учетом автоматического пропорционального снижения выходных токов преобразователя 1, осуществляется устойчивая коммутация токов в инверторе 4 в течение действия провала питающего напряжения. Кратковременное (на время длительности до 1,5 с провала напряжения) снижение (примерно в 1,2 раза) максимальных значений тока и развиваемого электромагнитного момента двигателя допустимо для большинства рабочих механизмов, т.к. приводит только к уменьшению предельных темпов разгона электропривода.
Упрощенное устройство по п.2 формулы (на фиг.2) работает следующим образом.
На вход прерывателя 21 с выхода датчика напряжения 16 поступает сигнал, пропорциональный фактическому напряжению на входе инвертора 4; на управляющий вход прерывателя 21 с выхода модулятора 12 поступает импульсный сигнал, задающий уровнями лог. О и лог. 1 соответственно, проводящее и непроводящее состояние силовых ключей инвертора 4. Управляемый ключ прерывателя 21 модулирует по скважности входной аналоговый сигнал прерывателя в функции его импульсного сигнала на управляющем входе, в результате чего на выходе прерывателя 21 формируется им- пуЛьсное прямоугольное напряжение амплитудой, пропорциональной выходному сигналу датчика напряжения 16 и временной длительностью импульсов и пауз, совпадающей с длительностью логических уровней О и 1 в выходном сигнале модулятора 12. Фильтр низкой частоты 22 выделяет из выходного сигнала прерывателя 21
постоянную составляющую, пропорциональную среДневыпрямленному значению (действующему значению основной гармоники) выходного напряжения инвертора 4 с широтно-импульсным регулированием вы0 ходного напряжения. Интегральный регулятор 23, на входы которого поступает заданный сигнал U средневыпрямленного значения выходного напряжения и сигнал отрицательной обратной связи о факти е5 ском средневыпрямленном значении выходного напряжения, воздействует на вход модулятора 12 и астатически стабилизирует фактическое значение U напряжения на уровне заданного значения U независимо
0 от колебаний напряжения питающей сети и изменения тока нагрузки.
Устройство с сокращенным временем торможения по п.З формулы (на фиг.3) работает следующим образом: на входах компа5 ратора 29 сравниваются сигнал . пропорциональный напряжению на конденсаторе фильтра З.и поступающий с выхода датчика напряжения 16, и сигнал уставки Dm максимального значения напряжения
0 на конденсаторе фильтра 3 (из условия без аварийной работы конденсатора фильтра 3 и силовых ключей инвертора 4). При поступлении нулевого сигнала на вход компаратора 24 узла задания 17 (что соответствует
5 команде режима торможения электропривода) изменяется на положительную полярность выходного сигнала компаратора 24, ключ 28 - закрыт (при отсутствии перенапряжений Уф Dm на фильтре 3 выходной
0 сигнал компаратора 29 равен нулю), через резисторы 25 и 26 поступает положительный сигнал на вход интегратора 27, вследствие чего его выходной сигнал f плавно уменьшается - наступает режим торможе5 ния электропривода. При этом при воздействии уменьшающегося по амплитуде выходного сигнала инвертора 17 на входы системы управления 6 и блока регулирования напряжения 13, пропорционально
0 уменьшаются выходные частота f и действующее напряжение U основной гармоники выходного напряжения преобразователя частоты 1, двигатель - тормозится. При торможении кинетическая.- . энергия, накоп5 ленная приводом, рассеивается в активных сопротивлениях двигателя, инвертора и в виде потерь в конденсаторе фильтра 3. С учетом односторонней проводимости неуправляемого выпрямителя 2 при торможении при больших темпах снижения сигнала
задания частоты на выходе узла задания 17, кинетическая энергия , возвращаемая в виде электрической энергии от двигателя, работающего в генераторном режиме, в инвертор 4 и фильтр 3, не успевает рассеивать- ся в активных элементах двигателя инвертора и фильтра, вследствие чего эта энергия накапливается в силовом фильтре 3 - путем увеличения заряда (напряжения) .конденсатора фильтра. Как только напряже- ние на конденсаторе фильтра достигает уровня максимально-допустимого (из уеловия безаварийной работы фильтра 3 и инвертора 4) напряжения Urn, устанавливается положительный сигнал на выходе компаратора 29, открывается ключ 28, прерывается ток от компаратора 24 через резистор 26 на вход интегратора 27, прекращается изменение выходного сигнала интегратора 27 (т.е. прекращается изме- нение выходной частоты инвертора), снижается величина скольжения двигателя в генераторном режиме работы, уменьшается мощность возврата кинетической энергии из привода через двигатель в ин- вертор и фильтр. Через некоторое время, вследствие рассеяния энергии в активных элементах инвертора, фильтра и двигателя, напряжение 1)ф на конденсаторе фильтра 3 уменьшается ниже предельно-допустимого значения Um, изменится на нулевой выходной сигнал компаратора 29, закроется ключ 28, продолжают снижаться выходной сигнал интегратора 17 и выходная частота инвертора 4. Таким образом, при торможении осуществляется автоматический выбор предельного по быстродействию темпа изменения (уменьшения) сигнала узла задания 17 из условия непревышения перенапряжений на входе инвертора 4 выше допустимых (для полупроводниковых элементов инвертора 4 и электролитических конденсаторов фильтра 3) значений.
Предложенное устройство уменьшает установленную мощность, массу и габариты инвертора в условиях питания преобразователя частоты от нестабильной питающей сети, упрощает устройство, сокращает время торможения электропривода.
Формула изобретения 1. Устройство для управления частотно- регулируемым асинхронным электроприводом, содержащее преобразователь частоты с широтно-импульсным регулированием выходного напряжения, выполненный в виде последовательно соединенных выпрямителя, силового фильтра, инвертора и клемм
для подключения асинхронного двигателя, управляющие входы инвертора подключены к выходу системы управления инвертором, составленной из последовательно соединенных задающего генератора, блока задания алгоритма модуляции, кольцевого счетчика, логического блока и блока формирования импульсов, при этом второй выход блока задания алгоритма модуляции соединен с первым входом модулятора, а второй вход модулятора и вход задающего генератора образуют входы системы управления инвертором, блок регулирования напряжения, снабженный задатчиком напряжения, регулятором напряжения и датчиком напряжения, соединенный входом с входом инвертора, вход задатчика напряжения соединен с выходом узла задания и входом задающего генератора, регулятор напряжения подсоединен первым входом к выходу Задатчика напряжения, вторым входом - к выходу датчика напряжения, а выходом - к второму входу модулятора, первый компаратор, подключенный первым входом к выходу датчика тока, вторым входом - к первому выходу источника сигнала задания, блок ограничения скольжения, соединенный выходом с входом узла задания, отличающееся тем, что, с целью улучшения массогабаритных показателей инвертора в условиях питания от нестабильной питающей сети, первый компаратор снабжен третьим входом, который соединен с выходом задатчика напряжения, а выход компаратора - с входом блока ограничения скольжения, модулятор выходом соединен с вторым входом логического блока, а датчик тока - с выходом выпрямителя.
2. Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что, с целью упрощения, регулятор напряжения выполнен в виде последовательно соединенных прерывателя, фильтра и интегрального регулятора, причем один из входов интегрального регулятора, его выход и управляющий вход прерывателя образуют соответственно первый вход, выход и второй вход регулятора напряжения, причем управляющий вход прерывателя подключен к выходу модулятора.
3. Устройство по п.1, отличающее- с я тем, что, с целью сокращения времени торможения, введен второй компаратор, соединенный первым входом с выходом датчика напряжения, вторым входом - с вторым выходом источника сигнала задания, а выходом - с дополнительным входом узла задания..
.. ... . - .. ... . .: .. .- .. - - - . 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления торможением частотно-регулируемого электропривода | 1984 |
|
SU1236593A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Устройство для автоматического управления асинхронным двигателем в режиме частотного торможения | 1988 |
|
SU1552322A1 |
| Частотно-регулируемый реверсивный электропривод | 1984 |
|
SU1170576A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| Частотно-регулируемый электропривод | 1978 |
|
SU744886A1 |
| Устройство для частотного управления тяговым асинхронным электродвигателем | 1980 |
|
SU877768A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2331152C1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1309247A1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1829102A1 |
-,: . V, /:
.:
- . : .:vi
AZSE6it
-.: . ... . .
- Г i
