Изобретение относится к спортивному оборудованию, а именно к устройству для тренировки мышц пользователя: спортсменов, инвалидов, школьников и т.д. , и может использоваться как подъемное устройство.
На фиг. 1 изображено предлагаемое устройство для тренировки мышц; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - то же, что и на фиг. 1, с другим вариантом шарнирного соединения пар рычагов с каркасом; на фиг. 4 - то же, что и на фиг. 1, с рычагами пар, поднятых в верхнее положение; на фиг. 5 - горизонтальная платформа в поднятом положении относительно каркаса; на фиг. 6 - вариант выполнения устройства для развития мышц спины с одновременным их массажем; на фиг. 7 - то же, вид сверху; на фиг. 8 - вариант выполнения устройства для тренировки мышц, разгибающих нижние конечности; на фиг. 9 - вариант выполнения устройства для тренировки мышц, сгибающих нижние конечности; на фиг. 10 - вариант выполнения исполнительного механизма для выполнения упражнения "Тяга из-за головы"; на фиг. 11 - вариант выполнения исполнительного механизма для развития мышц кистей, предплечья и плеча; на фиг. 12 - вариант выполнения исполнительного механизма для упражнения "Подъем в стороны согнутых рук"; на фиг. 13 - то же, вид сзади; на фиг. 14 - вариант выполнения исполнительного механизма для упражнения "Сведение и разведение ног"; на фиг. 15 - то же, вид сверху; на фиг. 16 - вариант выполнения исполнительного механизма для упражнения "Жим ногами"; на фиг. 17 - вариант выполнения исполнительного механизма для выполнения упражнения "Жим плечами"; на фиг. 18 - вариант выполнения исполнительного механизма для выполнения упражнения "Ротация сидя"; на фиг. 19 - вариант выполнения диска исполнительного механизма; на фиг. 20 - вариант выполнения исполнительного механизма для упражнения "Отжимание рук в стороны вниз"; на фиг. 21 - то же, вид сзади; на фиг. 22 - вариант выполнения исполнительного механизма для выполнения упражнения "Жим лежа".
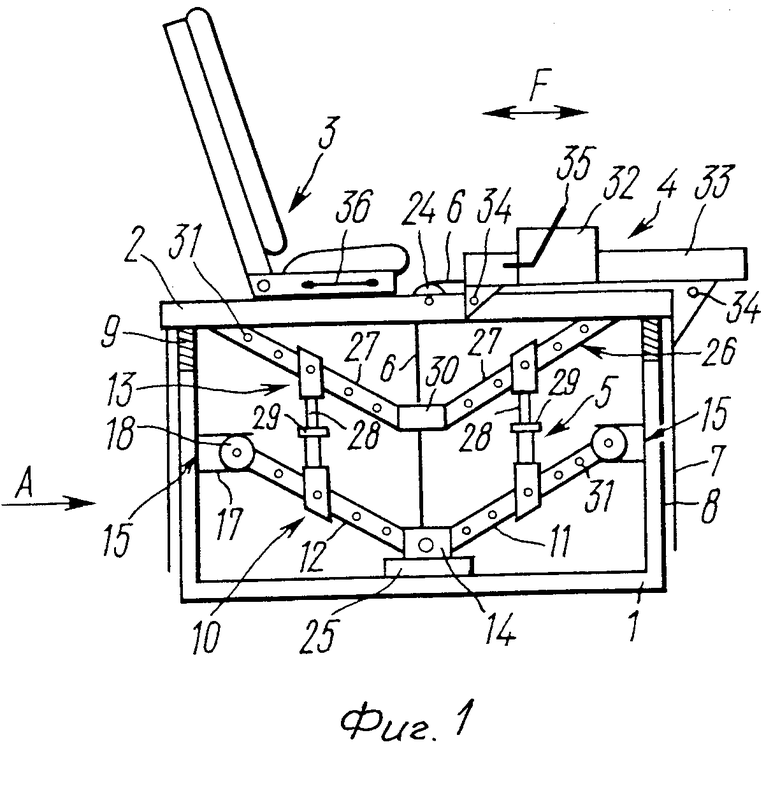
Устройство для тренировки мышц пользователя (спортсмена, школьника, инвалида и т.д.) содержит каркас 1 (фиг.1), горизонтальную платформу 2 с размещенными на ней приспособлением 3 для размещения пользователя и исполнительным механизмом 4, на который воздействует пользователь, средство 5 для создания нагрузки и гибкую тягу 6, соединяющую средство 5 для создания нагрузки и исполнительный механизм 4.
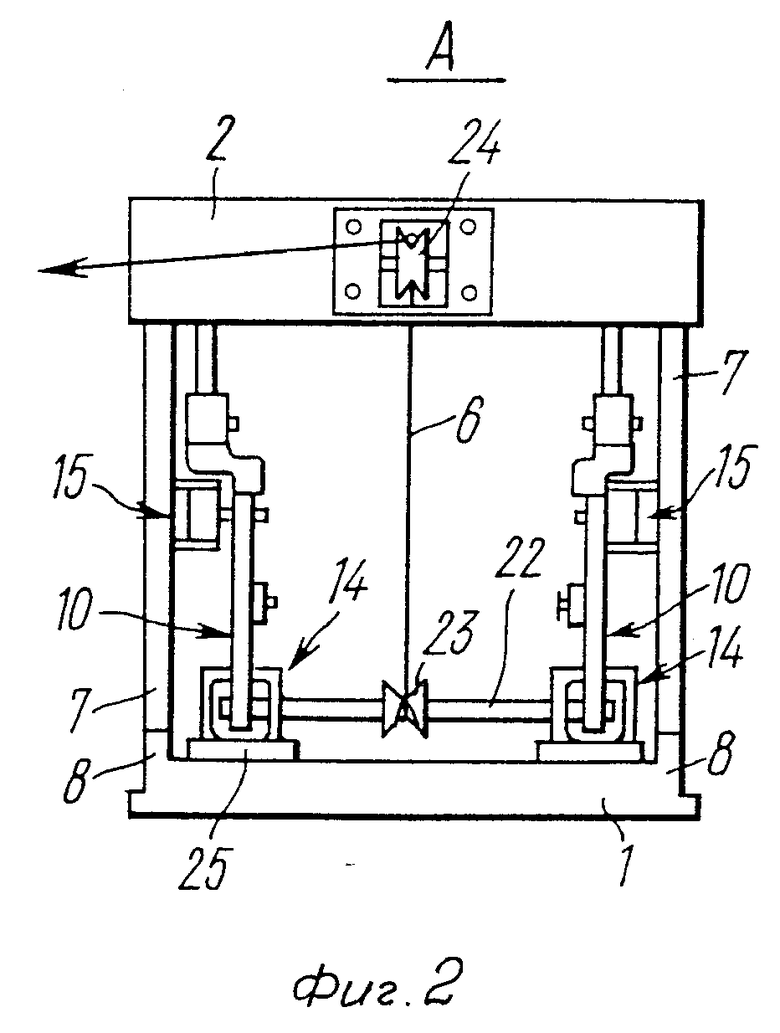
Горизонтальная платформа 2 имеет стойки 7 и установлена на вертикальных направляющих 8 каркаса с возможностью перемещения в вертикальном направлении. На концах направляющих 8 размещены амортизаторы 9, например упругие прокладки из резины, на которые опирается горизонтальная платформа 2. Под горизонтальной платформой 2 на каркасе 1 размещено средство 5 для создания нагрузки, которое содержит две или несколько, например четыре, если это необходимо, пары 10 (фиг.2) рычагов 11 и 12 (фиг.1) и приспособления 13 для регулировки прилагаемых усилий в процентном соотношении к поднимаемому весу пользователя.
В каждой паре 10 рычагами 11 и 12 расположены под углом один к другому и соединены между собой шарнирным узлом 14 любой известной конструкции. Каждая пара 10 рычагов 11 и 12 закреплена на каркасе 1, например на его вертикальных направляющих 8, посредством шарнирных соединений 15 или 16 (фиг. 3 и 4). Так, в соответствии с вариантом, показанным на фиг.1, каждое подвижное шарнирное соединение 15 включает в себя горизонтальную направляющую 17, закрепленную на вертикальной направляющей 8 каркаса, и подвижную опору 18, закрепленную на рычаге 12 (11) и размещенную в горизонтальной направляющей 17.
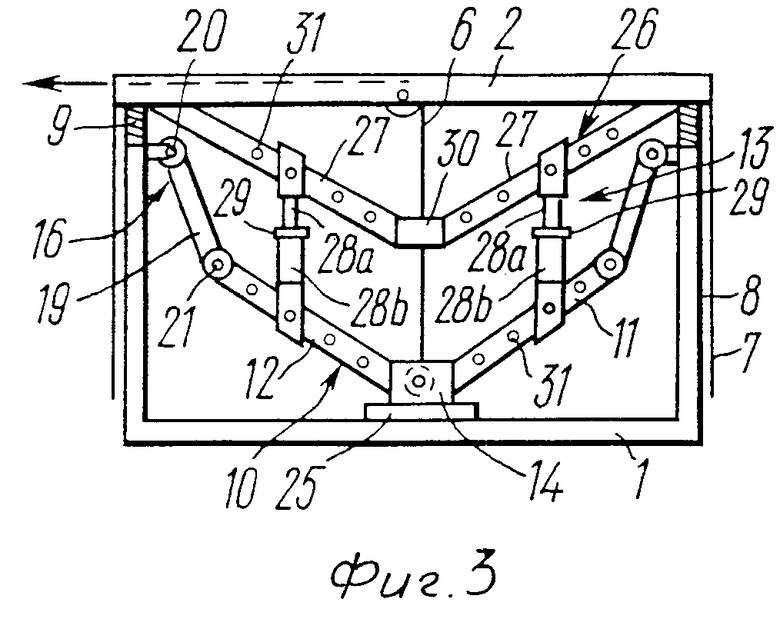
В соответствии с вариантом, показанным на фиг.4, каждое подвижное шарнирное соединение 16 выполнено в виде кулисы 19, один конец которой посредством поворотной оси 20 закреплен на кронштейне вертикальной направляющей 8 каркаса 1, а другой конец посредством поворотной оси 21 закреплен на рычаге 12 (11). Такие варианты выполнения шарнирного соединения 16 обеспечивают как поворот рычага 12 в вертикальной плоскости, так и поступательное его перемещение в этой же вертикальной плоскости, что исключает заклинивание рычагов 11 и 12 в каждой паре 10 при проходе их через "мертвую точку".
Шарнирные узлы 14 пар 10 рычагов 11 и 12 соединены между собой валом 22 (фиг.2), на котором закреплен узел 23 крепления конца гибкой тяги 6, причем гибкая тяга одним концом закреплена в узле 23, а другим соединена с исполнительным механизмом 4 (фиг.1) и проходит через направляющий блок 24, закрепленный на горизонтальной платформе 2. Под каждым шарнирным узлом 14 размещен амортизатор 25, установленный на каркасе 1 и выполненный известной конструкции.
Приспособление 13 для регулировки прилагаемых усилий в каждой паре 10 рычагов 11 и 12 содержит пару 26 рычагов 27, которая в дальнейшем именуется дополнительной парой 26, и вертикальные стойки 28, выполненные из двух подвижных одна относительно другой частей 28а, 28b (фиг.3), жестко фиксируемых после изменения длины вертикальной стойки 28 любым известным средством, например резьбовой втулкой 29 со стопором. Вертикальные стойки 28 размещены на рычагах 11 и 12 каждой пары 10 симметрично относительно шарнирного узла 14.
В дополнительных парах 26 рычаги 27 жестко соединены между собой узлом 30 и расположены параллельно основным парам 10 рычагов. Другими своими концами рычаги 27 дополнительных пар 26 жестко закреплены на горизонтальной платформе 2, осуществляя соединение горизонтальной платформы 2 через вертикальные стойки 28 с основными парами 10 рычагов 11 и 12. В каждом рычаге 11, 12 и 27 соответственно основных и дополнительных пар 10 и 26 выполнены отверстия 31, в которых с возможностью установочных перемещений размещены своими концами вертикальные стойки 28. Фиксация последних после их установочного перемещения на рычагах 11, 12 и 27 осуществляется резьбовой втулкой 29 со стопором. Различные положения стоек 28 показаны на фиг. 4 и 5, которые обеспечивают регулировку усилий от min до max в процентном соотношении к поднимаемому собственному весу пользователя.
В зависимости от вида выполняемых упражнений и необходимости тренировки различных групп мышц на горизонтальной платформе 2 устанавливают исполнительные механизмы 4 различной конструкции, варианты которых показаны на фиг. 6-22. В каждом исполнительном механизме имеется подвижный элемент, на который непосредственно воздействует пользователь и который соединен с концом гибкой тяги 6, другой конец которой соединен с шарнирным узлом 14 пар 10 рычагов 11 и 12 через вал 22.
Устройство работает следующим образом.
Пользователь располагается на приспособлении 3, в качестве которого используется, например, кресло, имеющее сиденье и спинку или только сиденье, или кресло с откинутой спинкой, или любое другое средство, удобное для осуществления тренировки заданной группы мышц.
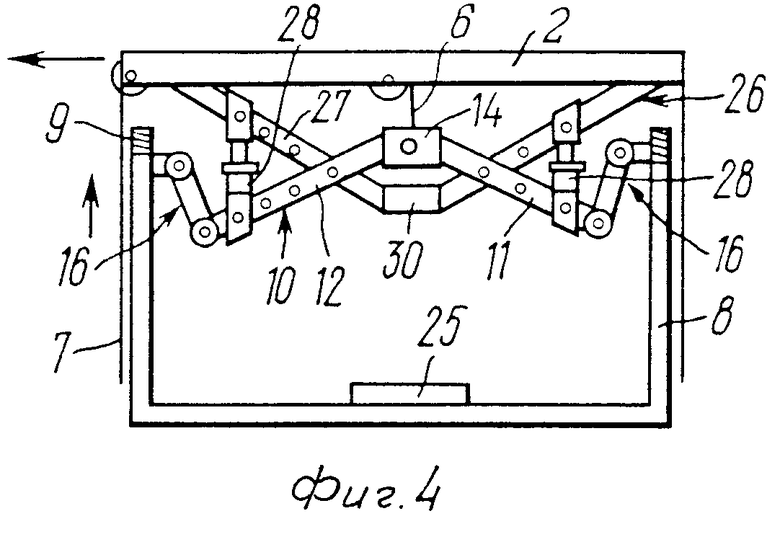
Пользователь, воздействуя на исполнительный механизм 4 (фиг.1), перемещает его подвижный элемент, например ползун 32, прикладывая усилие к гибкой тяге 6, под действием которого происходит выборка (перемещение) гибкой тяги 6. Последняя поднимает вал 22 (фиг.2) и шарнирные узлы 14 пар 10 рычагов 11 и 12. При таком подъеме рычаги 11 и 12 пар 10 выпрямляются за счет поворота шарнирного соединения 15 (фиг.1) и поступательного перемещения опоры 18 в горизонтальной направляющей 17, проходят через горизонтальное положение ("мертвую точку") и выгибаются в обратном направлении, занимая положение, показанное на фиг.4. Аналогичное движение рычаги 11 и 12 пар 10 совершают при повороте кулис 19.
Такое движение рычагов 11 и 12 пар 10 приводит к перемещению вместе с ними вертикальных стоек 28, которые поднимают дополнительные пары 26 рычагов 27 и горизонтальную платформу 2, как показано на фиг.5. При этом вертикальные стойки 7 горизонтальной платформы 2 перемещаются по вертикальным направлюящим 8 каркаса 1, что обеспечивает устойчивое перемещение платформы 2 вместе с размещенными на ней приспособлением 3 (фиг.1), пользователем и исполнительным механизмом 4, причем расстояние, на которое поднимается платформа 2, зависит от веса пользователя и усилия, которое он прикладывает для перемещения подвижного элемента - ползуна 32 исполнительного механизма 4. По мере снятия усилия со стороны пользователя на ползун 32 исполнительного механизма 4 происходит ослабление натяжения гибкой тяги 6, под действием веса пользователя происходит перемещение гибкой тяги 6 в обратном направлении и возврат ползуна 32 и рычагов пар 10 в исходное положение, благодаря чему опускается горизонтальная платформа 2 вместе с пользователем на каркас 1. При этом амортизаторы 9 и 25, на которые опускаются соответственно платформа 2 и шарнирные узлы 14, смягчают возможные удары при резком снятии усилия с исполнительного механизма 4.
Регулировка прилагаемых усилий в процентном соотношении к поднимаемому весу пользователя осуществляется путем установочного перемещения вертикальных стоек 28 в отверстиях 31 рычагов основных и дополнительных пар 10 и 26 и их фиксации в заданном положении стопорными элементами.
На фиг. 4 представлено положение вертикальных стоек 28 устройства, при котором усилие, прилагаемое пользователем на исполнительный механизм 4 для подъема горизонтальной платформы 2 вместе с пользователем, требуется минимальное, что достигается за счет использования всей длины рычагов 11 и 12 в парах 10 по отношению к точкам их опоры на каркас.
На фиг. 5 представлено положение вертикальных стоек 28, при котором они максимально удалены от точек опоры рычагов 11 и 12 на каркас, что требует приложения максимального усилия к исполнительному механизму для подъема горизонтальной платформы 2 вместе с пользователем.
Так, например, для развития мышц ног пользователя на горизонтальной платформе 2 предлагаемого устройства монтируют исполнительный механизм 4 (фиг. 1), содержащий направляющую 33, которую фиксируют крепежным элементом 34, ползун 32, к которому прикреплен конец гибкой тяги 6 и который установлен на направляющей 33, и упор 35 для ног, закрепленный на ползуне 32. Пользователь располагается на приспособлении 3, выполненном в виде кресла, держась за ручки 36, ногами производит силовое давление на упор 35 и, выпрямляя ноги, перемещает ползун 32 по направляющей 33, выбирая гибкую тягу 6, а вместе с ней поднимает платформу 2 и себя, преодолевая собственный вес. При плавном снятии усилия (сгибания ног) элементы конструкции устройства и горизонтальная платформа 2 под действием веса пользователя возвращаются в исходное положение.
Для тренировки и развития силы мышц спины и рук с одновременным проведением массажа мышц и поверхности спины используют исполнительный механизм 4, показанный на фиг. 6 и 7, содержащий вал 37, поворотно установленный на горизонтальной платформе 2, диски 38, смонтированные на торцах вала 37, и рычаги 39, несущие на свободных концах контактные валики 40. Рычаги 39 своими концами закреплены на дисках 38 эксцентрично оси поворота вала 37. На последнем закреплен конец гибкой тяги 6. Контактные валики 40 можно выполнить с рельефной поверхностью.
При таком выполнении исполнительного механизма 4 пользователь ложится на приспособление 3 лицом вниз, размещает на спине (в области шеи и плеч) контактные валики 4 и, держась за ручки 36, поднимает плечи вверх-назад, прогибаясь в пояснице. При поднимании плеч вверх-назад контактные валики 40 воздействуют на кожный покров и мышцы спины, поворачиваясь при этом на оси 41, а также отклоняют рычаги 39 вверх-назад (положение показано пунктиром). При отклонении рычага 39 за счет его эксцентричной установки на дисках 38 вала 37 происходит поворот этого вала и наматывание на него гибкой тяги 6, что приводит к подъему горизонтальной платформы 2 вместе с пользователем так, как это описано. При плавном опускании плеч под действием веса пользователя осуществляется движение рычагов 39 и вала 37 в обратном порядке и платформа 2 вместе с пользователем возвращается в исходное положение.
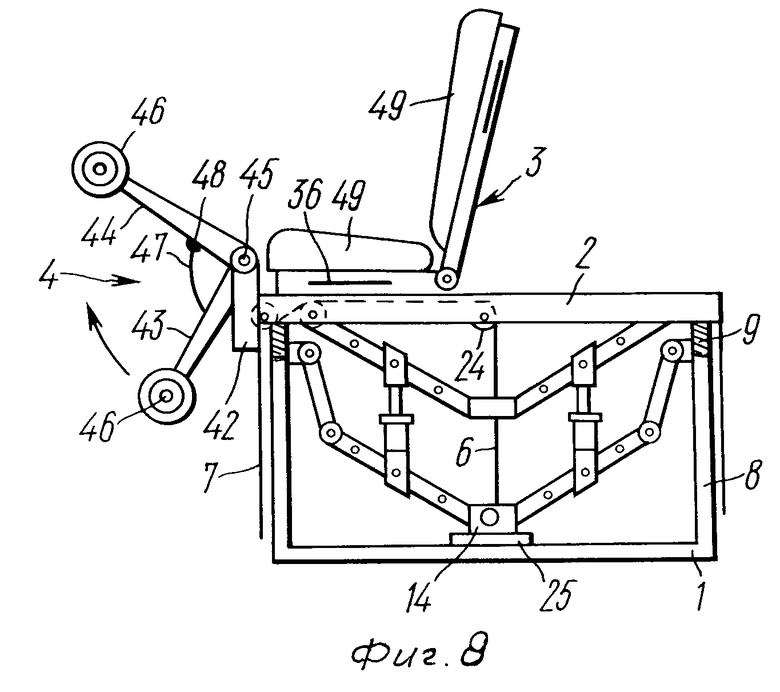
Для тренировки и развития мышц, разгибающих нижние конечности, на платформе 2 устройства устанавливается исполнительный механизм 4 (фиг.8), содержащий опору 42, закрепленную на платформе 2, фигурные рычаги 43 и 44, вал 45, амортизационные поворотные валики 46 (верхний и нижний), дугообразную направляющую 47 с защелкой 48.
Пользователь размещается в кресле 49 приспособления 3, располагает ступни ног под валиками 46 и, держаясь за ручки 36, подъемом стопы воздействует на нижний валик 46, в результате чего происходит перемещение валиков. Рычаг 43, поворачиваясь на валу 45, выбирает гибкую тягу 6, конец которой закреплен на направляющей 47, обеспечивая подъем платформы 2 с креслом и пользователем.
При сгибании ног в коленях происходит опускание рычага 43 и соответственно с этим возврат всех механизмов устройства в исходное положение вместе с горизонтальной платформой 2.
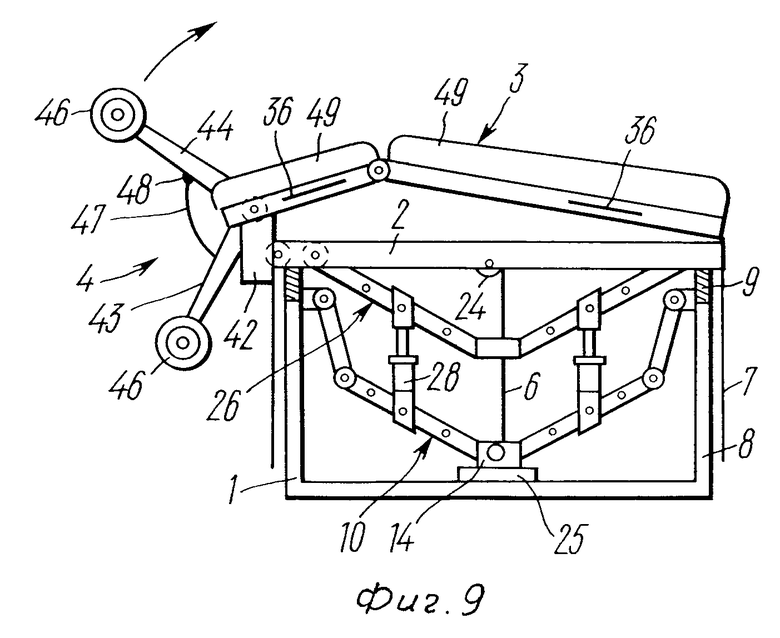
При выполнении другого вида упражнения для тренировки мышц, сгибающих нижние конечности, сиденье и спинку кресла 49 размещают в положение, показанное на фиг.9. Пользователь размещается на кресле лицом вниз, держась за ручки 36, пятки ног подводит под верхний амортизационный валик 46 и, сгибая ноги в коленях, осуществляет давление пятками на верхний валик 46, в результате чего поворачивается рычаг 44 на валу 45. Таким образом происходит выбор гибкой тяги 6 и обеспечивается подъем платформы 2 с креслом и пользователем. При плавном разгибании ног, т.е. снятии усилия с валика 46 и рычага 44, механизмы устройства возвращаются в исходное положение.
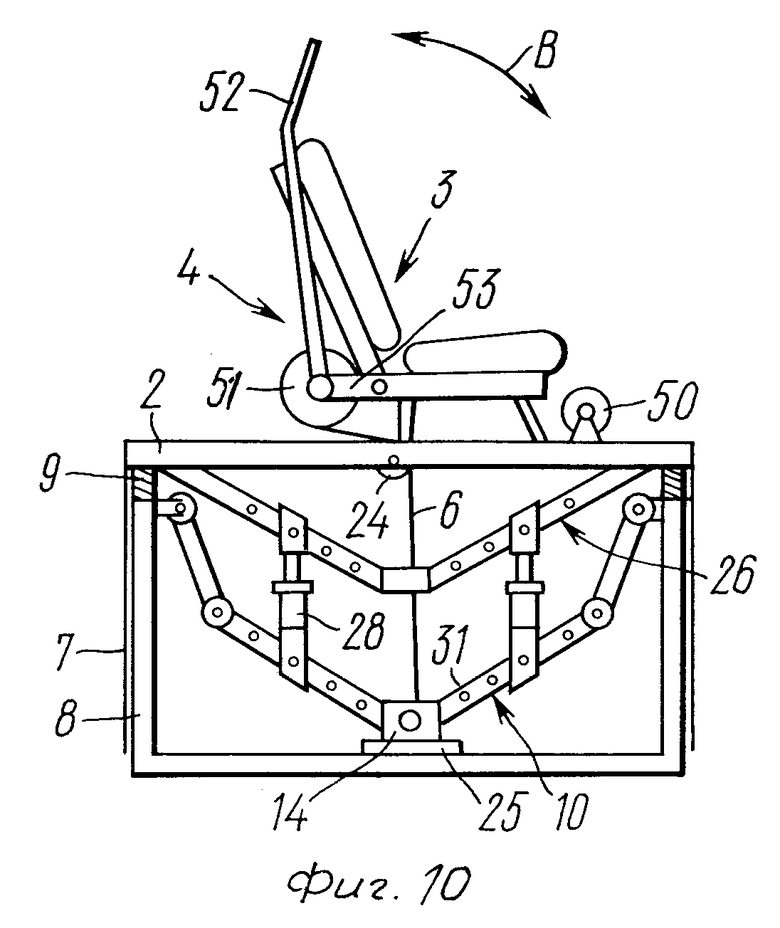
Для тренировки и развития мышц рук и плечевого пояса при выполнении упражнения "Тяга из-за головы" на горизонтальной платформе 2 (фиг.10) устанавливают исполнительный мехаизм 4, содержащий упорный валик 50, закрепленный на платформе 2, и поворотный силовой барабан 51, на котором закреплен конец гибкой тяги 6. На торцах барабана 51 закреплены рычаги 52. Поворотный силовой барабан 51 посредством кронштейна 53 закреплен на приспособлении 3 для размещения пользователя в кресле.
При выполнении упражнения пользователь размещается в кресле, подводит ступни ног под упорный валик 50, руками берется за рычаги 52 и поворачивает рычаги перед собой в направлении стрелки В. В результате силовой барабан 51 поворачивается с одновременной намоткой на него гибкой тяги 6, под действием которой происходит подъем платформы 2 вместе с пользователем, как это описано. При постепенном снятии прилагаемых усилий механизмы устройства возвращаются в исходное положение.
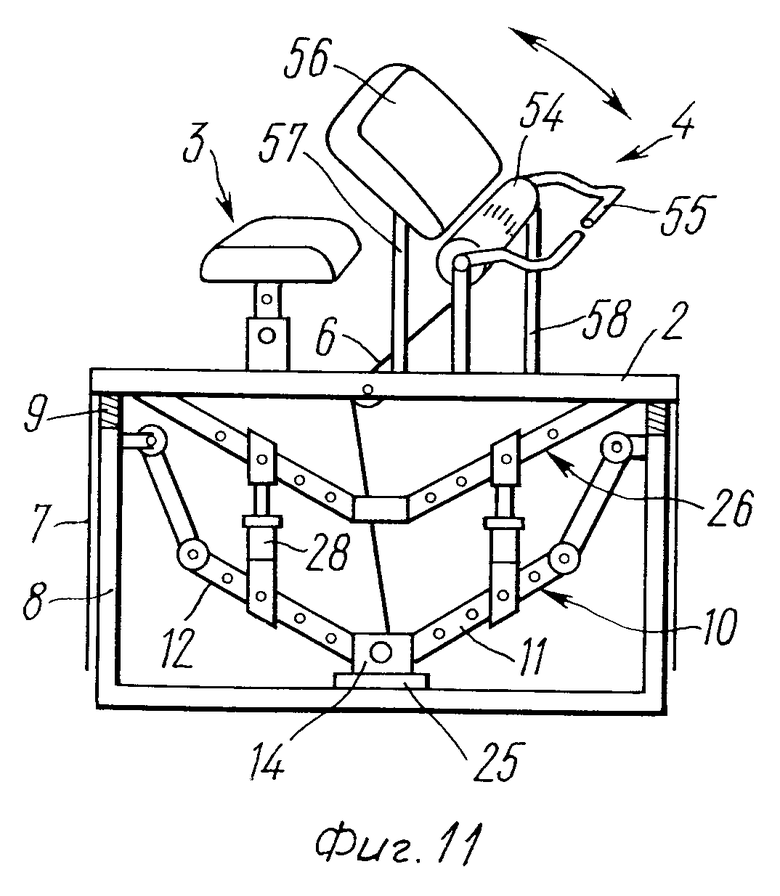
Для тренировки и развития мышц предплечья и плеча на устройстве устанавливают исполнительный механизм 4 (фиг.11), содержащий силовой барабан 54, на котором закреплен конец гибкой тяги 6, фигурные рычаги 55, жестко закрепленные на торцах силового барабана 54, и опорную подушку 56, размещенную между сиденьем приспособления 3 для размещения пользователя и силовым барабаном 54. На горизонтальной платформе 2 закреплены стойки 57 и 58, на которых смонтированы соответственно подушка 56 и силовой барабан 54.
При выполнении упражнения пользователь садится на сиденье, располагает предплечья рук на опорной подушке 56, кистями рук берет фигурные рычаги 55 и выполняет сгибание рук в локтях, поворачивая при этом и силовой барабан 54, в результате гибкая тяга 6 наматывается на барабан 54, что перемещает рычаги 11 и 12 пар 10 и через вертикальные стойки 28 поднимает горизонтальную платформу 2 вместе с пользователем, как это было описано. При разгибании рук (снятие прилагаемых усилий с фигурных рычагов 55) все механизмы устройства и горизонтальная платформа 2 возвращаются в исходное положение.
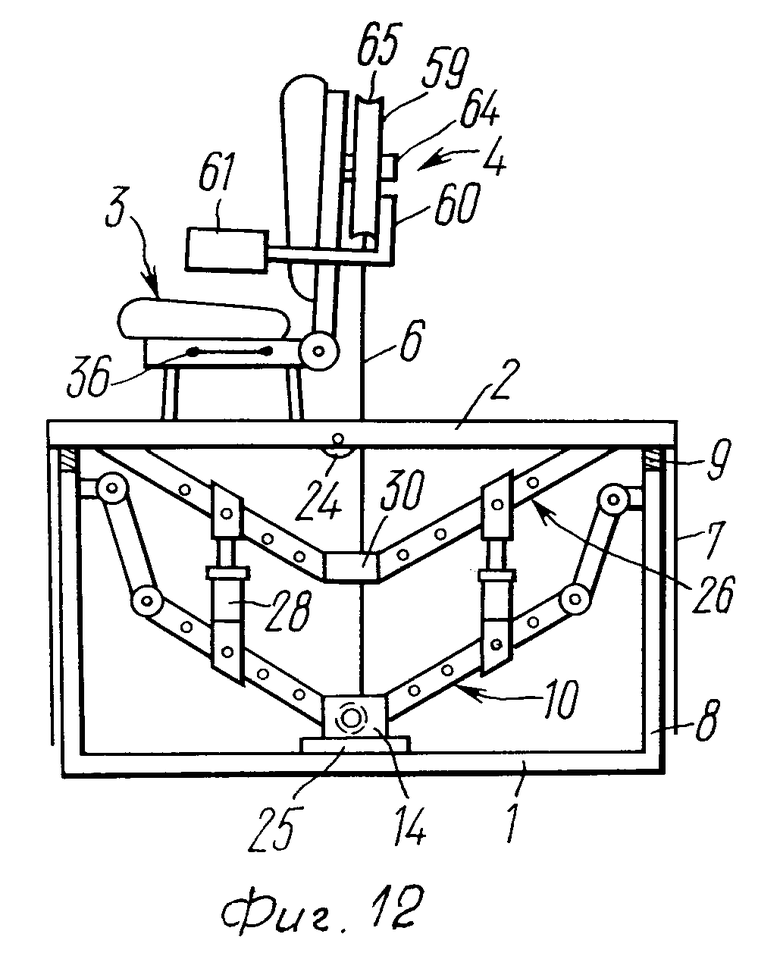
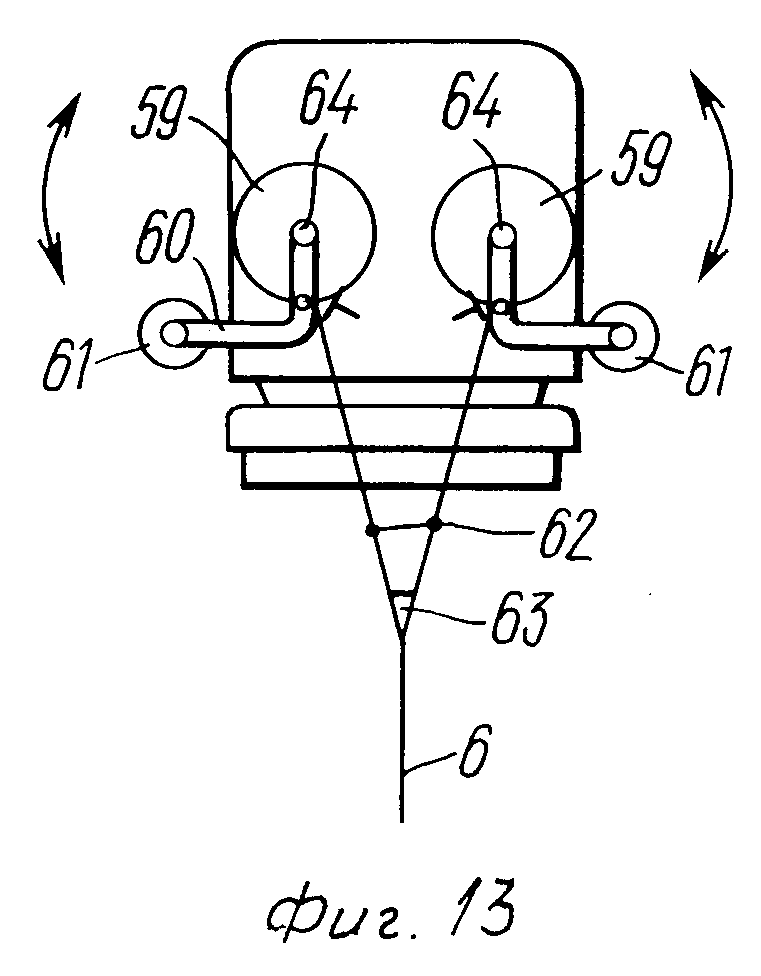
На фиг. 12 и 13 показан вариант устройства с исполнительным механизмом 4, обеспечивающим выполнение упражнения "Подъем в стороны согнутых рук", предназначенного для развития мышц рук, плеча и спины. Использованый механизм 4 содержит закрепленные на спинке кресла приспособления 3 для размещения пользователя два диска 59, фигурные рычаги 60 с амортизационными валиками 61. Фигурные рычаги 60 закреплены на дисках 59 и размещены с боковых сторон сиденья кресла. На каждом диске 59 закреплен конец гибкой тяги 6 через поводки 62 и тройник 63. Диски 59 поворотно установлены на осях 64 и имеют желоб 65 на боковой поверхности.
При выполеннии упражнения пользователь размещается на сиденье кресла, подводит согнутые руки под амортизационные валики 61 и, прилагая усилие на них, поднимает согнутые руки в стороны вверх, при этом фигурные рычаги 60 поворачиваются в вертикальной плоскости, вращая диски 59. При этом поводки 62 гибкой тяги 6, располагаясь в желобах 65, наматываются на диски 59, выбирая гибкую тягу 6. В результате осуществляется подъем платформы 2 вместе с пользователем. При опускании рук все механизмы устройства и горизонтальная платформа 2 возвращаются в исходное положение.
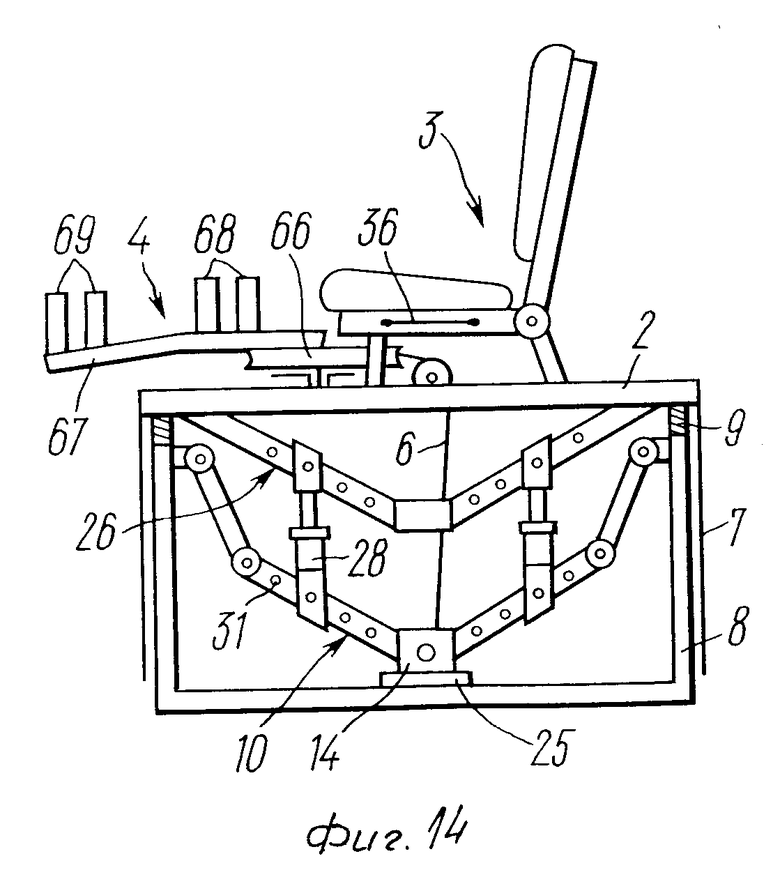
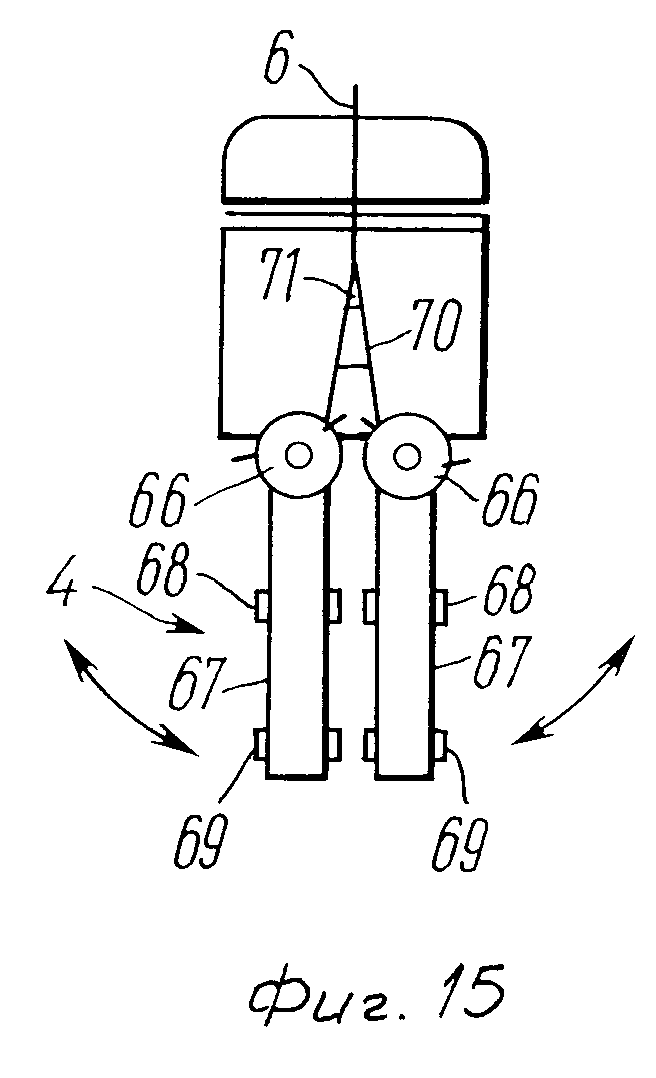
На фиг. 14 и 15 представлена конструкция устройства с исполнительным механизмом 4, обеспечивающим выполнение упражнения "Сведение и разведение ног" для развития силы мышц ног. Исполнительный механизм 4 содержит маховики 66, балки 67 с ограничителями-упорами 68 и 69, элементы крепления гибкой тяги 6 к маховикам 66 - поводки 70 и тройник 71.
При выполнении упражнения пользователь размещается в кресле, располагая ноги на плоскости балок 67 так, чтобы ступни ног размещались между ограничителями-упорами 69, а колени между ограничителями-упорами 68 и, держась руками за ручки 36 и прилагая усилия на ограничители-упоры 68 и 69, разводит ноги в горизонтальной плоскости в стороны. При этом поводки 70 наматываются на маховики 66 выбирая на себя гибкую тягу 6. В результате платформа 2 с креслом и пользователем поднимается. При плавном сведении ног механизмы устройства возвращаются в исходное положение.
На фиг. 16 показан вариант выполнения устройства с исполнительным механизмом 4, обеспечивающим развитие силы мышц ног из положения лежа на спине, выполняя упражнение "Жим ногами".
Исполнительный механизм 4 содержит стойку 72, закрепленную на горизонтальной платформе 2, направляющую 73, расположенную под углом к платформе 2 и соединенную шарнирно со стойкой 72 и приспособлением 3 для размещения пользователя в кресле, расположенном спинкой на направляющей 73, ползун 74 и упорную площадку 75 с опорным кронштейном 76, выполненным регулируемым для изменения угла наклона. Упорная площадка 75 закреплена на ползуне 74, размещенном на направляющей 73 с возможностью перемещения по ней и соединенном с гибкой тягой 6. Сиденье кресла установлено на кронштейне 77 с возможностью регулирования угла наклона по высоте, что достигается выполнением кронштейнов 76 и 77 и двух подвижных частей, фиксируемыми одна относительно другой любым крепежным элементом.
При выполнении упражнения "Жим ногами" пользователь ложится спиной на сиденье кресла, располагая ступни ног на упорной площадке 75 и держась руками за ручки 36, затем выпрямляет ноги, прикладывая усилие на упорную площадку 75. Под действием приложенного усилия упорная площадка 75 вместе с ползуном 74 перемещаются по направляющей 73, выбирая гибкую тягу 6 через направляющий блок 24, поднимая при этом платформу 2 вместе с размещенными на ней пользователем, креслом и исполнительным механизмом. При постепенном уменьшении усилия и сгибания ног все механизмы устройства возвращаются в исходное положение.
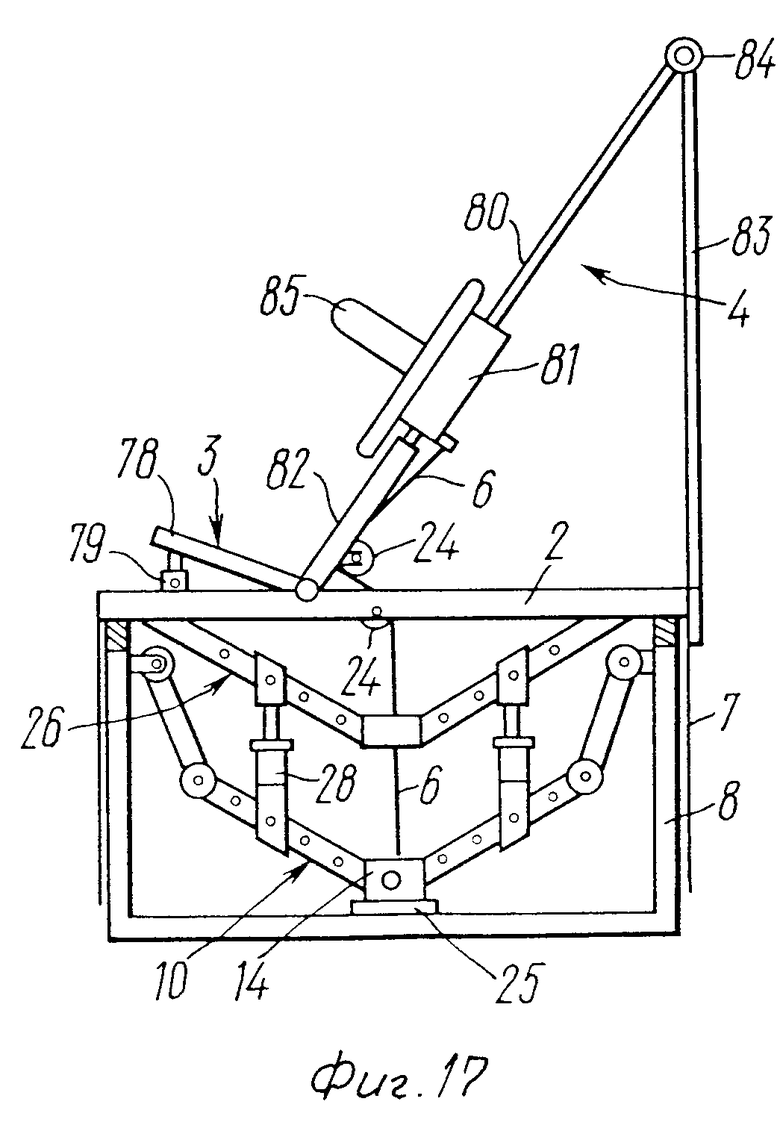
На фиг. 17 показан вариант выполнения устройства с исполнительным механизмом 4, позволяющим выполнять упражнение "Жим плечами" для развития силы мышц ног, спины и таза.
Исполнительный механизм содержит площадку 78 для ног пользователя, установленную на горизонтальной платформе 2 под углом к ней на регулируемой по высоте подставке 79, позволяющей изменять угол наклона площадки, направляющую 80 с размещенным на ней ползуном 81 и ограничителем 82 перемещения ползуна 81 и стойку 83, закрепленную на горизонтальной платформе 2. Стойка 83 и направляющая 80 шарниром 84 соединены между собой. Ползун 81 соединен с концом гибкой тяги 6, проходящей через направляющий блок 24. На ползуне 81 закреплены амортизационные валики 85.
При выполнении упражнения "Жим плечами" пользователь располагается ногами на площадке 78, занимая исходное положение "присев", с одновременной опорой спины на опорную поверхность ползуна 81, плечи подводит под амортизационные валики 85 и, выпрямляя ноги, прилагает усилие к валикам 85, под действием которых ползун 81 перемещается по направляющей 80. При этом происходит выборка гибкой тяги 6 и после перемещения рычагов пары 10 осуществляется подъем горизонтальной платформы 2 вместе с пользователем, приспособлением 3 для размещения пользователя и исполнительным механизмом 4. При снижении усилия и сгибания ног под действием веса пользователя горизонтальная площадка 2 и все механизмы устройства возвращаются в исходное положение.
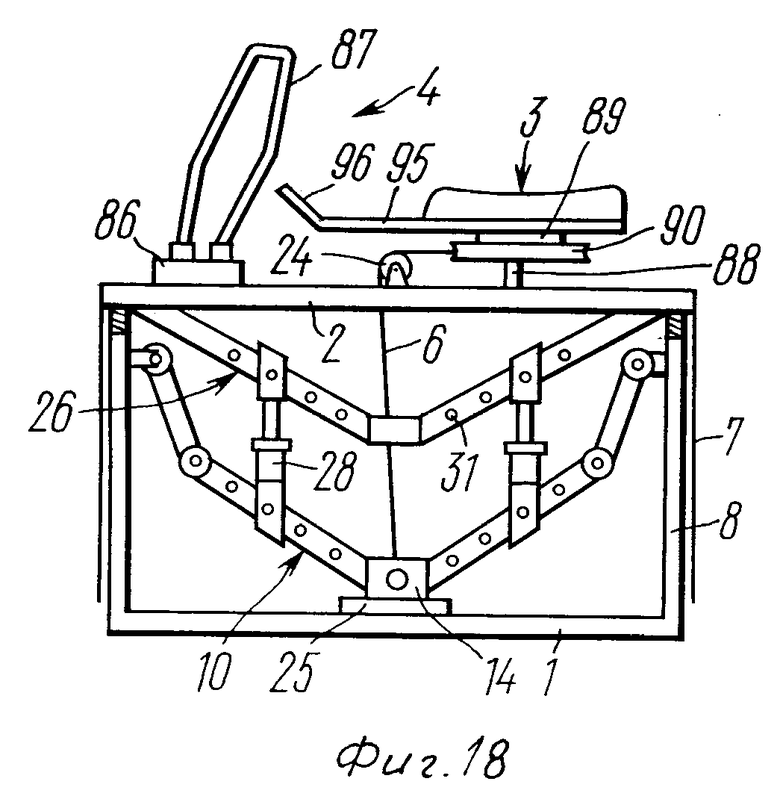
На фиг. 18 показан вариант выполнения устройства с исполнительным механизмом 4, позволяющим выполнять упражнение "Ротация сидя", т.е. скручивание туловища и вращение пользователя, обеспечивающее развитие силы мышц спины, туловища, рук, ног, плечевого пояса, тазобедренного сустава, брюшной полости, а также для создания психофизиологических воздействий на организм пользователя путем "скручивания" позвоночного столба, обеспечивающего раздражение нервной системы спинного мозга и вестибулярного аппарата.
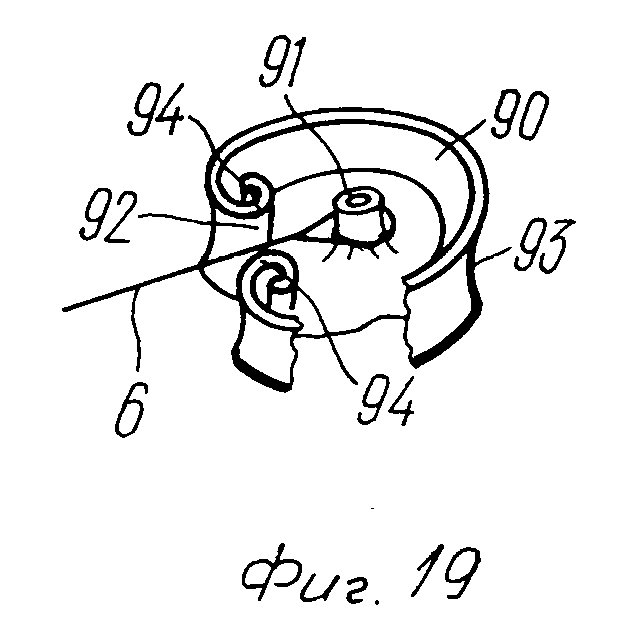
Исполнительный механизм 4 содержит закрепленную на горизонтальной платформе 2 подставку 86, на которой установлены фигурные поручни 87, и вертикальную ось 88, на которой посредством опоры 89 размещено с возможностью поворота в горизонтальной плоскости приспособление 3 для размещения пользователя, выполненное в виде сиденья. Под сиденьем на оси 88 смонтирован параллельно горизонтальной платформе 2 поворотный полый диск 90, жестко соединенный с сиденьем. Диск 90 имеет центральную втулку 91 (фиг.19), которой он насажен на ось 88 для его поворота. На боковой поверхности диска 90 выполнен сквозной паз 92 и желоб 93 для размещения в нем гибкой тяги 6, которая проходит через паз 92 и конец которой закреплен на втулке 91. Боковые стороны 94 паза 92 выполнены закругленной формы, что позволяет гибкой тяге 6 при поворотах диска 90 вправо или влево входить в его желоб, плавно сгибая боковые стороны 94 паза и создавая равнозначные условия выполнения упражнений при поворотах диска вправо-влево.
На сиденье закреплена рама 95 (фиг.18), на которой смонтирован упор 96 для ступней ног.
При выполнении упражнения пользователь размещается на сиденье с опорой ног в упоре 96, фиксирует руки на фигурных поручнях 87. Упираясь ступнями ног в упор 96, пользователь отводит их вправо или влево, вращая при этом таз совместно с сиденьем на оси 88 и скручивая позвоночный столб по отношению к плечам и зафиксированным рукам на фигурных поручнях 87. При поворотах пользователя вместе с сиденьем на диск 90 наматывается (выбирается) гибкая тяга 6, которая входит в его желоб 93, что приводит к перемещению рычагов пар 10 и подъему горизонтальной платформы 2 вместе с пользователем, сиденьем и исполнительным механизмом 4. При достижении критического угла скручивания пользователь выполняет аналогичные движения в противоположную сторону. При этом пользователь проходит через исходное положение, при котором под действием веса пользователя горизонтальная платформа 2 опускается, а затем вновь поднимается, при этом гибкая тяга 6 наматывается на диск 90 в противоположном направлении.
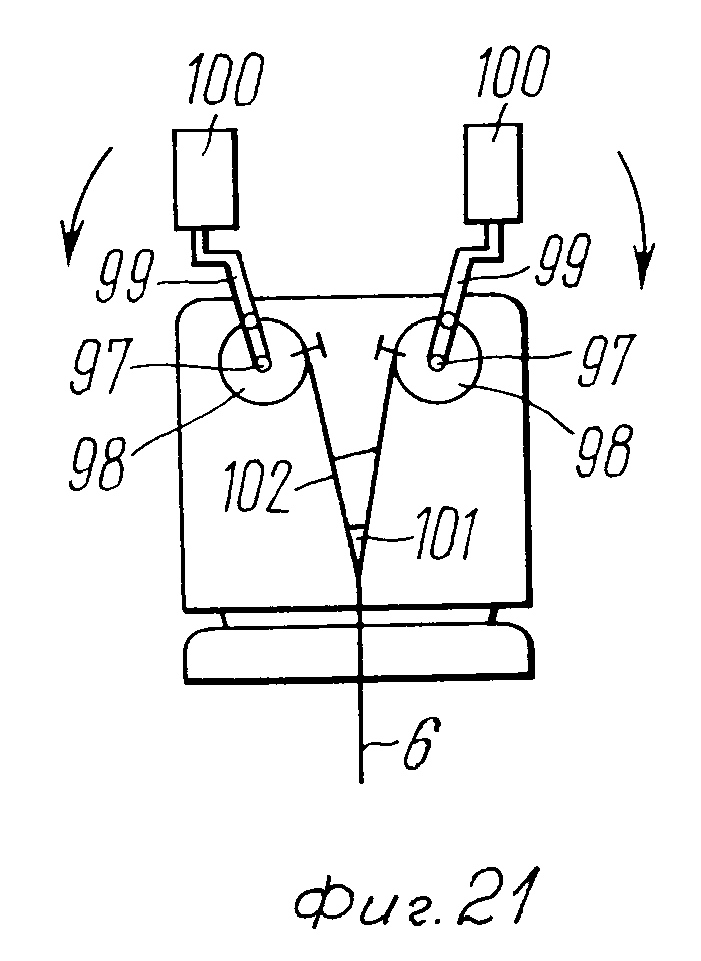
На фиг. 20 и 21 показан вариант выполнения устройства с исполнительным механизмом 4, позволяющим выполнять упражнение "Отжимание рук в стороны сверху вниз" для развития мышц плечевого пояса, рук, шеи, косых мышц спины.
На задней стороне спинки кресла на одном уровне закреплены две оси 97, на которых смонтирован исполнительный механизм, содержащий два диска 98, выполненые по конструкции аналогично маховику 66 (фиг.15), и два фигурных рычага 99, на конце каждого из которых закреплены амортизационные подушки 100, а другие концы закреплены на дисках 98 с возможностью установочных перемещений, которые осуществляются любым известным образом. Гибкая тяга 6 через тройник 101 и поводки 102 закреплена в каждом из дисков 98.
При выполнении упражнения пользователь садится в кресло, располагает вытянутые прямые руки вверх на амортизационных подушках 100 и, прилагая усилия, давит на подушки 100 и поворачивает рычаги 99 сверху вниз. При этом поводки 102 наматываются на диски 98, выбирая гибкую тягу 6 и поднимая горизонтальную платформу 2 вместе с размещенным на ней пользователем, креслом и исполнительным механизмом.
При плавном снижении усилия на подушки 100 и возвращении рук вверх рычаги 99 и диски 98, возвращаясь в исходное положение, опускают платформу 2 вместе с исполнительным механизмом, креслом и пользователем.
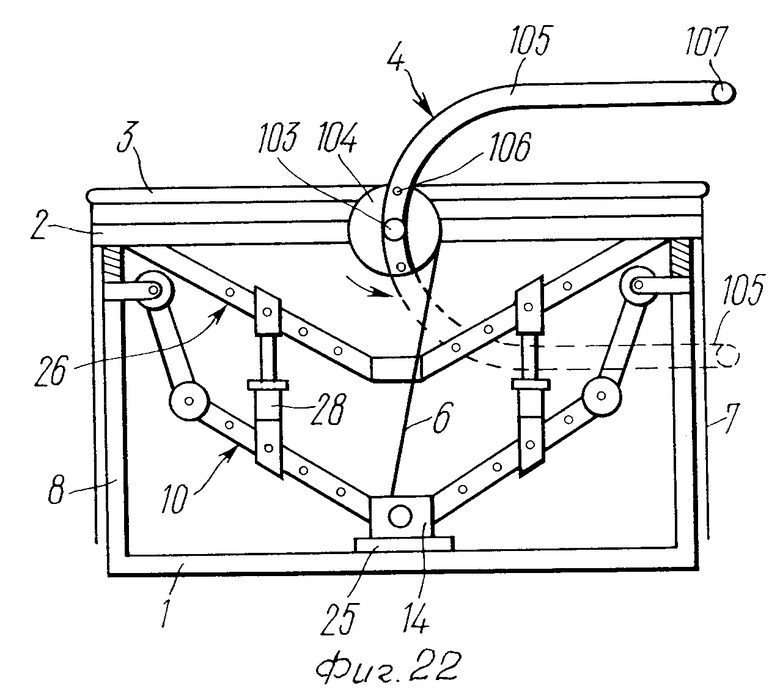
На фиг. 22 показан вариант выполнения устройства с исполнительным механизмом 4, позволяющим осуществить упражнение "Жим лежа" для развития силы мышц рук, плечевого пояса, грудных мышц и мышц спины.
Исполнительный механизм содержит вал 103, размещенный на горизонтальной платформе 2 с возможностью поворота, диски 104, закрепленные на торцах вала 103, и фигурные рычаги 105, каждый из которых закреплен на диске 104 с возможностью установочных перемещений, что достигается поворотом этих рычагов на оси вала 103, и фиксации в новом положении, например, резьбовыми элементами 106, которые размещены в соответствующих отверстиях, выполненных в рычагах 105 и дисках 104. Фигурные рычаги 105 размещены над платформой 2. Однако эти рычаги можно разместить ниже платформы 2 в положении, показанном пунктирными линиями, что позволяет расширить возможности данного устройства и выполнить упражнение "Тяга лежа" для развития силы мышц кистей, предплечья, плеча, шеи, косых мышц спины, грудных мышц. В обоих вариантах на свободных концах фигурных рычагов 105 размещена штанга 107 или рукоятка. Конец гибкой тяги 6 закреплен на валу 103.
Приспособление 3 для размещения пользователя выполнено в таком устройстве в виде лежака.
При выполнении упражнения "Жим лежа" пользователь ложится спиной на лежак, кисти рук располагает под штангой 107, причем форма хвата штанги кистями зависит от вида выполняемого упражнения. Затем, прикладывая усилия к штанге 107, пользователь выполняет жим (подъем) штанги 107, выпрямляя при этом руки. Прим подъеме штанги происходит подъем рычагов 105, а вместе с этим поворот диска 104 и вала 103. В процессе поворота последнего происходит наматывание на него (выборка) гибкой тяги 6. В результате происходит подъем горизонтальной платформы 2 вместе с размещенным на ней пользователем. При постепенном опускании штанги 107 и рычагов 105 вал 103 поворачивается в обратном направлении и механизмы устройства возвращаются в исходное положение.
При выполнении упражнения "Тяга лежа" пользователь размещается на лежаке лицом вниз, фигурные рычаги 105 устанавливаются в дисках 104 снизу. Пользователь определенным хватом кистями рук берет штангу 107 и осуществляет тягу (подъем) штанги вверх. Дальнейшая работа устройства аналогична описанной схеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1996 |
|
RU2096058C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1991 |
|
RU2046617C1 |
| Устройство силового привода тренажёра для тренировки мышц | 2021 |
|
RU2778862C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1995 |
|
RU2102094C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 2003 |
|
RU2240166C1 |
| УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ ФИГУРНОГО ВОРОТА В УСТРОЙСТВАХ ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1998 |
|
RU2127141C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ РУК | 2003 |
|
RU2239476C1 |
| УСТРОЙСТВО ДЛЯ РАЗВИТИЯ МЫШЦ НОГ | 1989 |
|
SU1831788A3 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1994 |
|
RU2095106C1 |
| УСТРОЙСТВО ДЛЯ РАЗВИТИЯ МЫШЦ НОГ | 1989 |
|
SU1831784A3 |





Изобретение относится к устройствам для тренировки мышц. Устройство имеет по меньшей мере вторую пару рычагов, расположенных под углом один относительно другого и соединенных между собой вторым шарнирным узлом, и снабжено третьей парой рычагов, расположенных параллельно рычагам пар и закрепленных на горизонтальной платформе. Шарнирные узлы пар рычагов соединены между собой и с другим концом гибкой тяги. В другом исполнении шарнирное соединение свободных концов рычагов пар с каркасом осуществлено посредством кулис. 10 з.п.ф-лы, 22 ил.
| Устройство для развития мышц плеч и туловища | 1989 |
|
SU1674873A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
