Изобретение относится к лазерному дистанционному зондированию атмосферы, в частности к способам исследования ее газового и аэрозольного состава.
Наиболее близким по технической сущности и достигаемому эффекту является способ обнаружения местоположения источника выброса, принятый в качестве прототипа (Лазерное зондирование тропосферы и подстилающей поверхности. /Под ред. В. Е.Зуева. Новосибирск: Наука, 1987, с.79), при котором стационарным лидаром дифференциального поглощения примесного газа зондируют исследуемый объем К раз сериями импульсов из М-двухволновых посылок с длинами волн, находящимися в спектральных зонах минимального и максимального поглощения примесного газа, принимают рассеянные сигналы, измеряют их интенсивность в каждой посылке импульсов и распределяют значения концентрации примесного газа в исследуемом объеме по дальности, а по превышению распределенными значениями концентрации предельно допустимых значений примесного газа в исследуемом объеме судят о наличии и расположении источника выброса.
Недостатком данного способа является то, что он не обеспечивает автоматического непрерывного анализа воздушного бассейна.
Целью изобретения является обеспечение непрерывного автоматического экологического анализа воздушного бассейна при высокой точности измерений и увеличение дальности действия.
Это достигается тем, что в способе обнаружения местоположения источника выброса, при котором стационарным лидаром дифференциального поглощения примесного газа зондируют исследуемый объем К раз сериями импульсов из М-двухволновых посылок с длинами волн, находящимися в спектральных зонах минимального и максимального поглощения примесного газа, принимают рассеянные сигналы, измеряют их интенсивность в каждой посылке импульсов и распределяют значения концентрации примесного газа в исследуемом объеме по дальности, а по превышению распределенными значениями концентрации предельно допустимых значений примесного газа в исследуемом объеме судят о наличии и расположении источника выброса, предварительно фиксируют на цифровой карте время и координаты потенциальных источников выброса, при зондировании стационарный лидар вращают вокруг его вертикальной оси за время, не превышающее времени жизни выброса, при измерении интенсивности рассеянного излучения в каждой посылке импульсов дополнительно измеряют интенсивность по сериям посылок и фиксируют время измерения, распределение значений концентрации примесного газа по дальности производят с учетом предварительно определенного коэффициента аэрозольного рассеяния, при превышении распределенными значениями концентрации примесного газа или коэффициентом аэрозольного рассеяния в исследуемом объеме предельно допустимых значений дополнительно измеряют направление и скорость перемещения, азимут и угол места загрязненного объема, производят дополнительное зондирование загрязненного объема передвижным лидаром многокомпонентного детального анализа и принимают сигналы рассеянного атмосферой загрязненного объема излучения, а расположение источника выброса определяют, сравнивая найденные параметры загрязненного объема с координатами цифровой карты потенциальных источников выброса.
Предлагаемый способ позволяет обеспечить непрерывный контроль за выбросами вредных веществ в воздушный бассейн за счет одновременного использования способа дифференциального поглощения и способа газового анализа по спектрам комбинационного рассеяния.
Рассмотрим основные количественные соотношения при дистанционном зондировании атмосферы лидарным способом.
Лидарный способ основан на зависимости величины сигнала n(λ1Z) от дальности зондирования
n(λ1Z) = AEoZ-2βπ(Z1λ1)exp -2
-2  + δ(λ)NdZ
+ δ(λ)NdZ ,
,
где βπ - коэффициент обратного рассеяния;
А - аппаратурная константа;
Ео - энергия излучения;
ε - показатель ослабления за счет рассеяния молекулами и аэрозолями;
σ(λ) - сечения поглощения исследуемого газа;
N - величина концентрации газа.
Дальность зондирования Z связана с временем, прошедшим после излучения импульса, соотношением Z = ct/2. Аппаратурная константа, кроме всех коэффициентов, определяющих переход от светового отражения рассеянного потока к электрическому сигналу, содержит множителем интервал пространственного усреднения Δ Z, который связан с длительностью строба сигнала Δ t формулой Δ Z = c Δ t/2.
Коэффициент обратного рассеяния назад βπ определяется как доля энергии, рассеянная в единичном телесном угле участком атмосферы единичной длины. Экспоненциальный член в управлении представляет собой величину пропускания трассы зондирования на двойном переходе. Из уравнения следует, что в общем случае решение уравнения невозможно, так как в него входят два неизвестных члена: поглощение и расстояние, соотношение между которыми в подавляющем большинстве случаев установить не удается. Поэтому для каждого конкретного вида измерений используют свою методику интерпретации результатов зондирования.
Способ дифференциального поглощения при двухволновом зондировании позволяет анализировать состав атмосферы, если для некоторой пары длин волн показатели поглощения газовых компонентов сильно различаются, в то время как суммарное ослабление остальными компонентами атмосферы меняется незначительно.
Основные соотношения можно получить, сравнивая два лидарных сигнала на λ1 и λ2 =
=  ·
·  exp
exp -2
-2  [ε(λ1Z)- ε(λ2Z)]dZ
[ε(λ1Z)- ε(λ2Z)]dZ
В этом случае зависимость отношения двух лидарных сигналов от длины трассы зондирования определяется в основном величиной дифференциального показателя поглощения
ΔσZ= [σ(λ1)-σ(λ2)] N исследуемого газа, что позволяет вычислить его содержание в атмосфере, причем доля этого газа в суммарном показателе поглощения может быть незначительной.
Измеряя концентрации газов при двухчастотном зондировании путем замера ослабления на некотором участке исследуемой трассы и измерения коэффициента обратного рассеивания и дальности зондирования в прямом Z и обратном Z2 направлениях излучения от 0 до Z, концентрацию примесного газа определяются по формуле
N = 
Измерение концентрации поглощающих газов можно осуществить, используя режим одновременной генерации и регистрации излучения на λ1 и λ2 либо режим зондирования чередующимися импульсами λ1, затем λ2. В первом случае изменчивость оптических свойств атмосферы не сказывается на точности измерений, так как условия на трассе одинаковы для λ1 и λ2, во втором случае изменчивость вносит некоторую неопределенность в измеряемую концентрацию.
При определении величины обратного аэрозольного рассеяния выбирают излучение в окне прозрачности атмосферы, чтобы поглощением газовых компонентов можно было пренебречь.
Одним из способов исключения величины прозрачности из уравнения является использование опорного сигнала комбинационного рассеяния. При этом абсолютную величину рассеяния можно определить, используя процедуру калибровки по романовскому рассеянию на молекулах азота, концентрация которого у поверхности Земли известна.
Относительную величину коэффициента аэрозольного рассеяния по дальности определяют по формуле =
=  exp{2ε(Z-Zo)} где βπ - коэффициент обратного рассеяния;
exp{2ε(Z-Zo)} где βπ - коэффициент обратного рассеяния;
ε - показатель ослабления за счет рассеяния аэрозолями;
n*(Zo) - нормированный опорный сигнал;
n*(Z) - нормированный сигнал;
Z - текущее значение дальности;
Zo - значение опорной дальности.
Лидарный способ дистанционного газового анализа атмосферы по спектрам комбинационного рассеяния света позволяет одновременно измерять концентрации нескольких газовых компонентов атмосферы в силу специфического спектрального сдвига линий комбинационного рассеяния для различных веществ.
Способ измерения по комбинационному рассеянию состоит в следующем.
Измеряют величину сигнал nx на длинах волны, соответствующей романовскому сдвигу для исследуемого газа, и проводят нормировку на сигнал no романовского рассеяния на азоте, концентрация которого No известна. В результате для измеряемой величины концентрации Nx получают выражение
Nx= m  где m - отношение аппаратурных констант;
где m - отношение аппаратурных констант;
σо - сечение комбинационного рассеяния для азота;
σx - сечение комбинационного рассеяния для исследуемого газа.
Предполагается, что весь спектр регистрируется одновременно, т.е. излучаемая в процессе измерения энергия одинакова для всех спектральных компонентов, а величина прозрачности атмосферы постоянна в пределах романовского спектра.
Предлагаемый способ основан на использовании дифференциального и комбинационного лидарных способов дистанционного газового анализа в комплексе.
Лидарный способ дифференциального (сравнительного) поглощения при двухволновом зондировании позволяет анализировать состояние воздушного бассейна на большой дальности.
Однако способ дифференциального поглощения позволяет определять ограниченное количество загрязняющих компонентов. Выбор анализируемых компонентов должен определяться преобладающими загрязнителями, характерными для данного промышленного центра. Например, определяющими загрязнителями в г. Москве являются NO2 и SO2, выбросы которых составляют ежегодно сотни тонн.
Импульсный режим дает возможность измерять расстояния до рассеивающего объема.
Лидарный способ дистанционного газового анализа атмосферы по спектрам комбинационного рассеяния реализуется в передвижном лидаре комбинационного рассеяния.
Лидарный способ дистанционного газового анализа атмосферы по спектрам комбинационного рассеяния света позволяет одновременно измерять концентрации нескольких газовых компонентов атмосферы в силу специфического сдвига линий комбинационного рассеяния для различных веществ.
С помощью способа дифференциального поглощения осуществляется непрерывный круглосуточный контроль выбросов вредных веществ в воздушный бассейн, при превышении ПДК в воздушном бассейне определяют координаты рассеивающего объема, где зарегистрирован выброс, и передают целеуказания передвижному лидару по радиоканалу. Применяя способ газового анализа атмосферы по спектрам комбинационного рассеяния, уточняют состав и координаты источника выброса и производят его отождествление с источником выброса.
Перед проведением способа, используя способ дифференциального поглощения, снимают карту распределения концентрации загрязняющих веществ, представляющую собой цифровую карту промышленного центра, на которую нанесены потенциальные источники загрязнений воздушного бассейна, указаны их координаты, состав концентрации выбросов, предельные значения концентрации для данного источника. Все эти данные оцифровываются и вводятся в память ВУКа.
Круговое зондирование воздушного бассейна осуществляют по априорно заданным координатам, т.е. по потенциальным источникам загрязнений.
Время одного обзора определяется минимальным временем жизни выброса и может лежать в пределах от 30 мин до 2 ч.
Зондирование по заданным координатам производят К раз сериями импульсов из М-двухволновых зондирующих посылок с длинами волн, находящимися в минимуме и максимуме резонансного поглощения примесного газа, и при исследовании рассеивающего объема на наличие аэрозоля зондирование осуществляют К раз на одной или двух разнесенных длинах волн. Зондирование осуществляют стационарным лидаром.
Например, для измерения NO2 используется излучение с длинами волн λ1 = 446,9 и λ2 = 448,2 нм. Для измерения SO2 используется излучение с λ3 = 307,7 и λ4 = 308,4 нм. Для измерения аэрозолей используется излучение с длинами волн излучения λ5 = =446,9 и λ6 = 448,2 нм с длительностью импульса измерения 20-30 нс (с режимом работы одновременно на двух длинах волн).
Длительность импульсов измерения составляет 20-30 нс с поочередным режимом генерации на каждой из длин волн с периодом 0,01 с.
Принятые сигналы представляют собой два ряда чисел, соответствующих величине сигналов, принимаемых фотоприемным устройством излучения пар зондирующих импульсов с λ1 и λ2, и λ3 и λ4.
При измерении концентрации, например SO2, излученному импульсу на λ3 соответствует последовательность чисел ai, а импульсу на λ4 - последовательность bi при i = 1...n, которые затем запоминают.
Для повышения точности измерений производят несколько зондирований по данному направлению и получают последовательности чисел
ai = a1, a2...an,
bi = b1, b2...bn.
Затем производят скользящее суммирование членов результирующих последовательностей по К числам с шагом усреднения от К =3 до К = 10.
После процесса усреднения получают для каждой пары длин волн 2 ряда чисел
ai' = a1', a2'...a'(n - k),
bi' = b1', b2'...b'(n - k).
Распределение концентрации примесного газа в атмосфере по трассе зондирования в зависимости от дальности определяют по формуле
N =  где Δ Z - величина строба по дальности;
где Δ Z - величина строба по дальности;
i, j - номер чисел в ряду;
Δσ - дифференциальное сечение поглощения SО2 или NO2.
Для определения величины аэрозольного загрязнения атмосферы используют отраженный сигнал на λ5 или λ6 =
=  exp[2ε(Z-Zo)] где n*(Zo) - нормированный опорный сигнал;
exp[2ε(Z-Zo)] где n*(Zo) - нормированный опорный сигнал;
n*(Z) - нормированный сигнал.
Определяют и запоминают азимут и угол места до рассеивающего объема. Привязывают все измерения к единой шкале времени. Далее сравнивают распределение концентрации примесного газа по дальности с предельно допустимой концентрацией загрязняющих веществ на заданном направлении. Определяют координаты рассеивающего объема, которые затем отождествляют с координатами предполагаемого источника выброса с учетом скорости и направления ветра. Полученные данные оцифровывают, запоминают и наносят на цифровую карту города.
С целью увеличения дальности действия при непрерывном круговом обзоре зондирующее излучение направляют на оптические или топографические отражатели с известными координатами.
Трассы должны быть выбраны при заданном положении лидара таким образом, чтобы вынос выброса от потенциальных источников в городе был наиболее вероятен при любых возможных направлениях ветра. На трассе длиной 7-20 км целесообразно устанавливать угловые отражатели по концентрическим окружностям.
Пpи превышении предельно допустимой концентрации примесного газа передают целеуказания передвижному лидару по радиоканалу.
Для вывода лидара комбинационного рассеяния (ЛКО) на источник выброса с лидара кругового обзора (ЛКР) должна поступать следующая информация: оцифрованная карта района выброса, координаты потенциальных источников загрязнений, возможный состав выбросов, основные ориентиры, азимут и угол места наведения антенны, величина и направление ветрового сноса.
ЛКР осуществляет зондирование источника выброса по заданному направлению путем сканирования луча на фиксированной длине волны.
Зондирование производят с длиной волны излучения λ = 380 нс и длительностью импульса излучения 20-30 нс.
Осуществляют прием отраженных сигналов и измерение интенсивностей спектра комбинационного рассеяния с распределением по дальности, привязывают все измерения к единой шкале времени, запоминают и осредняют измеренные интенсивности, по которым определяют состав и концентрацию примесных газов с учетом заданного направления и скорости ветра, определяют координаты рассеивающего объема. Привязывают координаты рассеивающего объема к координатам источника выброса на местности, производят отождествление координат источника с источником выброса.
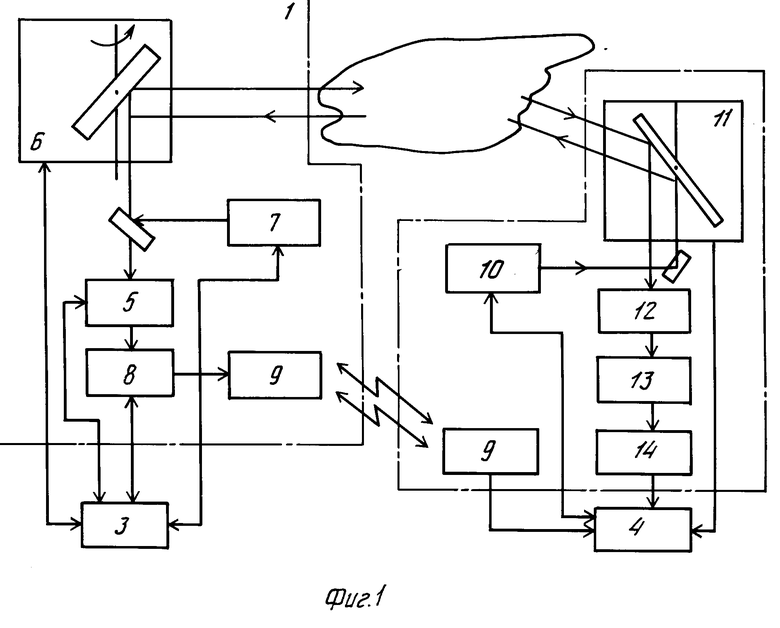
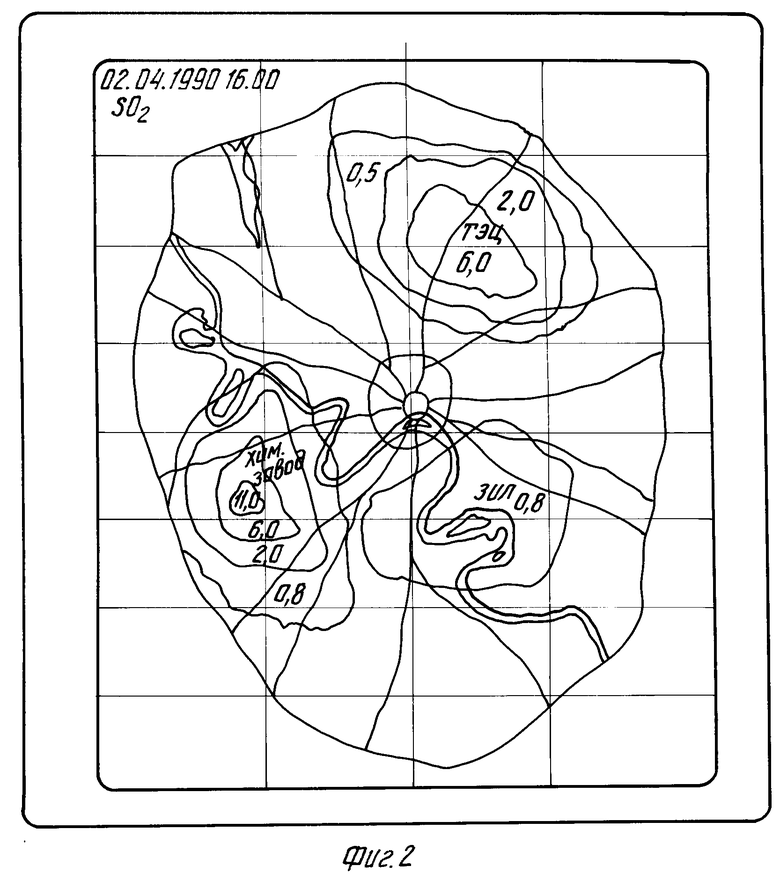
На фиг.1 приведен один из возможных вариантов устройства, реализующего данный способ; на фиг.2 - вид панорамы распределения загрязнения на экране дисплея.
Устройство содержит лидар 1 кругового обзора (ЛКО), лидар 2 комбинационного рассеяния (ЛКР), вычислительно-управляющий комплекс 3 ЛКО, вычислительно-управляющий комплекс 4 ЛКР.
Лидар кругового обзора включает оптико-приемную антенну 5, систему 6 наведения и управления лазерным лучом, лазерно-передающий блок 7, аппаратуру 8 приема и обработки сигнала, систему 9 передачи данных.
Комбинационный лазер включает лазерно-передающий блок 10, систему 11 наведения и управления лазерным лучом, оптико-приемную антенну 12, монохроматор 13, приемное устройство 14.
Дифференциальный (круговой) лидар 1 устанавливают на доминирующих строениях. Он предназначен для непрерывного круглосуточного анализа выбросов аэрозоля и газа на территории с радиусом 7-15 км, измерения азимута и расстояния до источника загрязнения.
Лидар 2 комбинационного рассеяния (передвижной) предназначен для многокомпонентного дистанционного газоанализа загрязняющих выбросов. Он предназначен для определения газового состава шлейфов промышленных выбросов из дымовых труб, вентиляционных вытяжек и т.д., а также для определения границ опасных зон в аварийных ситуациях (разрыв газопроводов, транспортные аварии и т.д.). ЛКО выполняют в виде передвижного комплекса, смонтированного в фургоне автомобиля.
ЛКР 2 имеет дальность действия 0,5-1 км и снабжен автономным каналом радиотелефонной связи с лидаром 1 кругового обзора. В случае обнаружения ЛКО 1 аномально высоких концентраций загрязнений в указанный район по целеуказаниям направляют лидар 2 комбинационного рассеяния. ВУК 3 обеспечивает включение лазерно-передающего блока 7 в соответствии с заданной программой, обеспечивающей проведение измерений методами дифференциального поглощения. С ВУКа 3 на лазерно-передающее устройство 7 поступает код команд для передатчиков, а в обратную сторону - подтверждение выполнения команд.
Одновременно с включением лазерно-передающего блока 7 по сигналу с ВУКа 3 ЛКО системой наведения и управления лазерным лучом осуществляется наведение рабочего поля зрения лидара на заданное направление поворотом по углу места и азимуту целостатного зеркала. Система наведения построена по азимутально-угломерной схеме, в которой текущие угловые координаты сравниваются с программой, выдаваемой ВУКом 3. Сигнал рассогласования действует до тех пор, пока программная и текущая координаты не станут одинаковыми. Формирование рабочей диаграммы направленности зондирующего излучения осуществляется передающим объективом.
Рассеянное загрязняющими компонентами излучение поступает через целостатное зеркало системы 6 наведения в оптико-приемную антенну 5, где осуществляются уменьшение динамического диапазона уровня принимаемого светового излучения (в зависимости от расстояния), а также необходимые оптические коммутации, фильтрация и преобразование пространственных характеристик световых пучков. Управление работой осуществляется по команде ВУКа 3. Сформированное до необходимых пространственных характеристик и спектрально отфильтрованное излучение подается на аппаратуру 8 приема и обработки сигнала. Аппаратура 8 обработки лидарного сигнала предназначена для измерения уровня принимаемого рассеянного светового излучения с целью контроля загрязнения атмосферы газовыми компонентами и аэрозолем. Моменты измерения уровней загрязнения привязываются к системе единого времени с погрешностью ± 1 с. Связь с ВУКом 3 ЛКО обеспечивает обмен измерительной и командной информацией. Результаты измерений, получаемые после каждой посылки двухволновых зондирующих импульсов, выдаются в ВУК 3 ЛКО. Для каждого направления измерения производится обработка принимаемой информации и результаты обработки запоминаются. В режиме кругового обзора выходная информация отображается на дисплее ВУКа 3 в виде цветных пятен, представляющих проекции облаков загрязняющих веществ на фоне цифровой карты города.
Каждый цвет соответствует определенной величине превышения предельно допустимой концентрации загрязнения.
Кроме панорамы на экране отображается время измерения, тип загрязнения и другая информация (фиг.2).
К моменту окончания одного обзора в памяти ВУК формируется массив информационных кадров, содержащих координаты точек, лежащих на направлении измерений величины концентрации загрязнений, соответствующих этим точкам. Информационные кадры привязаны по времени.
Далее системой 9 передачи данных ЛКО по радиоканалу целеуказания передаются ЛКР 2. По сигналу с ВУКа 4 ЛКР включается лазерный передатчик и происходит наведение рабочего поля зрения ЛКР на заданное направление. Рассеянное загрязняющими компонентами излучение через целостатное зеркало системы 11 наведения поступает в оптическую приемную антенну 12. Сформированное и спектрально отфильтрованное излучение через монохроматор 13 и светоприемное устройство 14 поступает на ВУК 4 ЛКР. Все три каскада монохроматора собраны по несимметричной горизонтальной схеме Эберта-Фасти, которая позволяет получить высокое спектральное разрешение за счет компенсации комы. Светоприемное устройство позволяет измерять распределение газовых компонентов вдоль трассы.
Информация после каждого импульса измерения поступает в ВУК, где происходят накопление информации в процессе измерения и ее обработка. Далее информация выводится на дисплей в виде спектра комбинационного рассеяния. До окончания сеанса измерений информация обрабатывается по заданной программе. Результаты информации привязываются по времени.
Информация содержит название обнаруженных веществ, величины измеренных концентраций для каждой дальности зондирования на заданном азимуте и угле места. В выходную информацию впечатывается время измерения, число, месяц, год, координаты места наблюдения, дальность, угол места, азимут выброса и источник загрязнения.
Предлагаемый способ по сравнению с прототипом обеспечивает непрерывный автоматический анализ воздушного бассейна промышленного центра; обработку результатов измерений в реальном масштабе времени; привязку результатов измерений к конкретным источникам выбросов.
Указанные преимущества обеспечиваются за счет комплексного использования способов дифференциального и комбинационного рассеяния. Использование данного способа позволяет определять большое количество загрязняющих компонентов с высокой точностью и на больших расстояниях.
Данный способ позволяет проводить анализ всего воздушного бассейна промышленного центра, а не только локального источника. Обзор осуществляется непрерывно днем и ночью по кругу, а время обзора выбирается из условий минимального времени жизни выброса.
Все измерения проводятся автоматически, так как в памяти ВУКа находятся координаты потенциальных источников, их состав и последовательность их опроса.
Способ позволяет однозначно отождествлять источник выбросов путем сопоставления результатов измерений при дифференциальном и комбинационном способах с привязкой их к цифровой карте промышленного центра, на которой обозначены координаты источников и состав выбросов с привязкой их к наиболее близко расположенным источникам с учетом ветрового сноса. Все результаты измерений привязаны к системе единого времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИДАРНЫЙ КОМПЛЕКС КОНТРОЛЯ ЗАГРЯЗНЕНИЯ ВОЗДУХА | 1991 |
|
RU2022251C1 |
| Способ дистанционного поиска индикаторных веществ проявлений нефтегазовых углеводородов | 2016 |
|
RU2634488C1 |
| СПЕКТРОРАДИОМЕТРИЧЕСКИЙ СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЛАКОВ ТОКСИЧНЫХ ГАЗООБРАЗНЫХ ВЕЩЕСТВ В АТМОСФЕРЕ | 2011 |
|
RU2478995C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ УГЛЕКИСЛОГО ГАЗА В АТМОСФЕРЕ | 2010 |
|
RU2422807C1 |
| Устройство для зондирования атмосферного озона на наклонных и горизонтальных трассах с адаптивной системой ВКР-преобразования | 2024 |
|
RU2839559C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЗРАЧНОСТИ, КОНЦЕНТРАЦИИ ГАЗОВЫХ КОМПОНЕНТ РАССЕИВАЮЩИХ СРЕД НА ДВУХВОЛНОВОМ ЛАЗЕРЕ | 2011 |
|
RU2480737C1 |
| Мобильный лидар для зондирования атмосферного озона на наклонных и горизонтальных трассах | 2023 |
|
RU2803518C1 |
| ЛИДАР ДИФФЕРЕНЦИАЛЬНОГО ПОГЛОЩЕНИЯ НА МОБИЛЬНОМ НОСИТЕЛЕ | 2013 |
|
RU2567469C2 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ РАЗМЕРОВ ТОНКОДИСПЕРСНЫХ АЭРОЗОЛЕЙ СТОЙКИХ ТОКСИЧНЫХ ХИМИКАТОВ ПРИ ВОЗНИКНОВЕНИИ ЗАПРОЕКТНЫХ АВАРИЙ НА ХИМИЧЕСКИ ОПАСНЫХ ОБЪЕКТАХ | 2014 |
|
RU2578105C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВИДИМОСТИ И МИКРОСТРУКТУРЫ АТМОСФЕРНЫХ ОБРАЗОВАНИЙ | 1996 |
|
RU2110082C1 |
Использование: в области лазерного дистанционного зондирования атмосферы, в частности при исследовании ее газового и аэрозольного состава. Сущность изобретения: предварительно фиксируют на цифровой карте время и координаты потенциальных источников выброса, при зондировании стационарный лидар вращают вокруг его вертикальной оси за время, не превышающее времени жизни выброса, при измерении интенсивности рассеяного излучения в каждой посылке импульсов дополнительно измеряют интенсивность по сериям посылок и фиксируют время измерения. Распределение значений концентраций примесного газа по дальности производят с учетом предварительно определенного коэффициента аэрозольного рассеяния, при превышении распределенных значений концентраций газа и коэффициента рассеяния дополнительно измеряют направление и скорость перемещения, азимут и угол места загрязненного объема, производят дополнительное зондирование загрязненного объема передвижным лидаром многокомпонентного детального анализа. Расположение источника выброса определяют, сравнивая найденные параметры загрязненного объема с коэффициентами цифровой карты потенциальных источников выброса. 2 ил.
СПОСОБ ОБНАРУЖЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ВЫБРОСА, при котором стационарным лидаром дифференциального поглощения примесного газа зондируют исследуемый объем K раз сериями импульсов из M двухволновых посылок с длинами волн, находящимися в спектральных зонах минимального и максимального поглощения примесного газа, принимают рассеянные сигналы, измеряют их интенсивность в каждой посылке импульсов и распределяют значения концентрации примесного газа в исследуемом объеме по дальности, а по превышению распределенными значениями концентрации предельно допустимых значений примесного газа в исследуемом объеме судят о наличии и расположении источника выброса, отличающийся тем, что предварительно фиксируют на цифровой карте время и координаты потенциальных источников выброса, при зондировании стационарный лидар вращают вокруг его вертикальной оси за время, не превышающее времени жизни выброса, при измерении интенсивности рассеянного излучения в каждой посылке импульсов дополнительно измеряют интенсивность по сериям посылок и фиксируют время измерения, распределение значений концентрации примесного газа по дальности производят с учетом предварительно определенного коэффициента аэрозольного рассеяния, при превышении распределенными значениями концентрации примесного газа или коэффициента аэрозольного рассеяния в исследуемом объеме предельно допустимых значений дополнительно измеряют направление и скорость перемешения, азимут и угол места загрязненного объема, проводят дополнительное зондирование загрязненного объема передвижным лидаром многокомпонентного детального анализа и принимают сигналы рассеянного атмосферой загрязненного объема излучения, а суждение о расположении источника выброса формируют путем сравнения найденных параметров загрязненного объема с координатами цифровой карты потенциальных источников выброса.
| Лазерное зондирование тропосферы и подстилающей поверхности./под ред | |||
| В.Е | |||
| Зуева | |||
| Новосибирск: наука, 1987 | |||
| Цилиндрический сушильный шкаф с двойными стенками | 0 |
|
SU79A1 |
