Изобретение относится к аналитическому приборостроению и может быть использовано для дистанционного контроля загрязнения атмосферы.
Известен комбинационный лидар [1], содержащий источник лазерного излучения, передающую и приемную оптическую систему, спектроанализатор, фоторегистрирующее устройство и газовую кювету.
Недостатком комбинационного лидара является то, что он может использоваться только для локальных задач экологии.
Наиболее близким по технической сущности и достигаемому эффекту является система анализа для определения загрязнений атмосферы или воды [2]. Система анализа для определения загрязнений содержит лазерный импульсный передатчик, приемник, спектрометр и систему синхронизации.
Недостатком системы анализа является то, что система не обеспечивает автоматический непрерывный контроль загрязнений воздуха и используется для решения локальных задач экологии.
Целью изобретения является обеспечение непрерывного автоматического контроля воздушного бассейна в крупных городах, промышленных центрах при высокой точности измерений и большой дальности действия.
Цель достигается тем, что усовершенствуется оптическая система контроля загрязнения воздуха, содержащая устройство для многокомпонентного анализа воздуха, включающее лазерный излучатель, оптическую приемную антенну, спектроанализатор и фотоприемное устройство.
Отличительными признаками оптической системы контроля загрязнения воздуха является то, что дополнительно введен лидар дифференциального поглощения, содержащий последовательно установленные по ходу отраженного излучения систему наведения, оптическую приемную антенну, оптико-механический блок (ОМБ) и систему приема и обработки сигнала, выход перестраиваемого лазерного излучателя через оптический коммутатор одновременно оптически связан с входом системы наведения и с входом блока калибровки, выход которого соединен с вторым входом ОМБ, при этом выход системы наведения через поворотное зеркало оптически связан с входом телевизионного визира (ТВВ), входы-выходы вычислительно-управляющего комплекса (ВУК) через магистраль обмена соединены с соответствующими входами-выходами ТВВ, ОМБ, системы наведения, перестраиваемого лазерного излучателя, системы передачи целеуказаний, графопостроителя и системы синхронизации частоты времени, при этом в устройство для многокомпонентного анализа воздуха дополнительно введены устройство определения координат объекта, блок калибровки, система приема целеуказаний, телевизионный визир, оптический коммутатор и система синхронизации частота времени, при этом в устройстве для многокомпонентного анализа воздуха оптическая приемная антенна, спектроанализатор и фотоприемное устройство последовательно установлены по ходу принимаемого излучения, выход лазерного излучателя через оптический коммутатор одновременно оптически связан с входом системы наведения и с входом блока калибровки, выход которого соединен с входом спектроанализатора, выход системы наведения через поворотное зеркало оптически связан с входом телевизионного визира, при этом входы-выходы устройства определения координат, системы приема целеуказаний, телевизионного визира, системы наведения, лазерного излучателя, фотоприемного устройства и системы синхронизации частоты времени соединены с соответствующими входами-выходами ВУК, а система передачи целеуказаний лидара дифференциального поглощения по каналу связи связана с системой приема целеуказаний устройства для многокомпонентного анализа.
Кроме того, с целью увеличения дальности оптическая система контроля загрязнения воздуха отличается тем, что на тросах зондирования лидаром дифференциального поглощения установлены отражатели.
С целью увеличения дальности и точности измерений оптико-механический блок содержит корректор дальности, выход которого соединен с первым входом узкополосного фильтра, выход которого является выходом оптико-механического переключателя, вход которого является третьим входом оптико-механического блока, механический переключатель, вход которого является вторым входом ОМБ, выход оптико-механического переключателя соединен с вторым входом узкополосного фильтра.
Оптический коммутатор оптической системы выполнен в виде отключающего зеркала, установленного с возможностью возвратно-поступательного перемещения.
Фотоприемное устройство устройства для многокомпонентного анализа выполнено двухкоординатным - дальность-частота.
Заявитель не обнаружил технических решений, имеющих сходные признаки с признаками, отличающим заявляемое решение от прототипа, а следовательно, предлагаемое техническое решение обладает существенными отличиями.
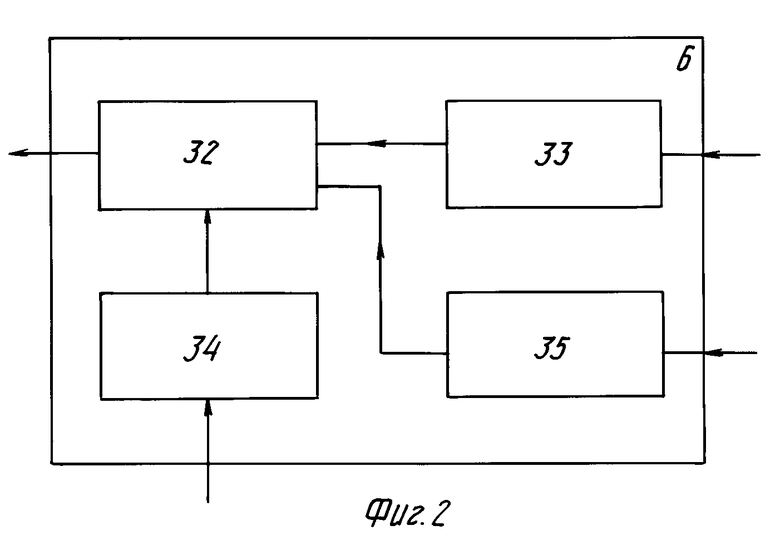
На фиг. 1 представлена структурная схема оптической системы контроля загрязнения воздуха; на фиг. 2 - структурная схема оптико-механического блока дифференциального лидара.
Лидарная система контроля загрязнения воздуха включает в себя лидар 1 дифференциального рассеяния, устройство 2 многокомпонентного анализа.
Лидар дифференциального поглощения содержит телевизионный визир 3, систему 4 наведения лазерного луча, оптическую приемную антенну 5, оптико-механический блок 6, систему 7 приема и обработки сигнала, блок 8 калибровки, перестраиваемый лазерный излучатель 9, систему 10 передачи целеуказаний, дисплей 11, вычислительно-управляющий комплекс 12, графопостроитель 13, систему 14 синхронизации частоты времени, магистраль 15 обмена, оптический коммутатор 16.
Устройство для многокомпонентного анализа воздуха содержит систему 17 приема целеуказаний, лазерный излучатель 18, систему 19 наведения лазерного луча, блок 20 калибровки, оптическую приемную антенну 21, телевизионный визир 22, спектроанализатор 23, фотоприемное устройство 24, систему 25 синхронизации частоты времени, дисплей 26, вычислительно-управляющий комплекс (ВУК) 27, магистраль 28 обмена, устройство 29 определения координат объекта, оптический переключатель 30, графопостроитель 31.
Оптико-механический блок содержит узкополосные фильтры 32, корректор 33 дальности, механический переключатель 34, оптико-механический переключатель 35.
Оптическая система контроля загрязнения воздуха содержит лидар 1 дифференциального поглощения и устройство для многокомпонентного анализа. Лидар 1 дифференциального поглощения включает последовательно установленные по ходу отраженного излучения систему 4 наведения, оптическую приемную антенну 5, ОМБ 6 и систему 7 приема и обработки сигнала, выход перестраиваемого лазерного излучателя 9 через оптический коммутатор 16 одновременно оптически связан с входом системы 4 наведения и с входом блока 8 калибровки, выход которого соединен с вторым входом ОМБ 6, при этом выход системы 4 наведения через поворотное зеркало оптически связан с входом ТВВ 3, входы-выходы ВУК через магистраль обмена соединены с соответствующими входами-выходами ТВВ 3 ОМБ 6 системы 4 наведения перестраиваемого лазерного излучателя 9 системы 10 передачи целеуказаний, графопостроителя 13 и системы 14 синхронизации частоты времени.
Устройство 2 для многокомпонентного анализа содержит последовательно установленные по ходу принимаемого излучения систему 19 наведения, оптическую приемную антенну 21, спектроанализатор 23 и фотоприемное устройство 24, выход лазерного излучателя 18 через оптический коммутатор 30 одновременно связан с входом системы 19 наведения и с входом блока 20 калибровки, выход которого соединен с входом спектроанализатора 23, выход системы 19 наведения через поворотное зеркало оптически связан с входом ТВВ 22, при этом входы-выходы системы 16 определения координат, системы 17 приема целеуказания, телевизионного визира 22, системы 19 наведения, лазерного излучателя 18, фотоприемного устройства 24 и системы 23 синхронизации частоты времени соединены с соответствующими входами-выходами ВУК 27, а система 10 передачи целеуказания лидара дифференциального поглощения по каналу связи связана с системой 17 приема целеуказаний устройства для многокомпонентного анализа воздуха.
Оптико-механический блок 6 лидара дифференциального поглощения содержит корректор 33 дальности, выход которого соединен с первым входом узкополосных фильтров 32, выход которых является выходом ОМБ, оптико-механический переключатель 35, вход которого является третьим входом ОМБ, и механический переключатель, вход которого является вторым входом ОМБ, выход механического переключателя соединен с вторым входом узкополосного фильтра.
Оптическая система контроля позволяет обеспечить непрерывный контроль за выбросами вредных веществ в воздушный бассейн за счет комплексного использования дифференциального лидара (лидаpа кругового обзора ЛКО) и устройства для многокомпонентного анализа.
Лидар кругового обзора устанавливают в промышленных зонах на доминирующих по высоте строениях. Режим кругового обзора ЛКО предназначен для непрерывного контроля содержания примесных газов и аэрозолей. При этом производится измерение азимута и расстояния до загрязненного участка. В случае обнаружения аварийного выброса происходит передача целеуказаний устройству для многокомпонентного анализа.
Устройство для многокомпонентного анализа воздуха выполняется в виде передвижного комплекса, смонтированного в фургоне автомобиля. Устройство для многокомпонентного анализа работает по целеуказаниям, которые состоят из координат места стоянки лидара, углов поворота системы наведения, предполагаемых источников выброса и их состава, направления и скорости ветра.
Конечной задачей устройства для многокомпонентого анализа является определение состава и концентрации выбросов и отождествление источников выброса.
Перед проведением экологического анализа атмосферы, используя ЛКО, строится карта распределения концентрации загрязняющих веществ. Эта карта представляет собой цифровую карту города, региона, области, на которую заранее нанесены потенциальные источники загрязнения воздушного бассейна, указаны их координаты, состав выброса, предельные значения концентрации для данного источника. На карту наносятся результаты измерений лидара кругового обзора в виде изолиний в ПДК.
Лидар кругового обзора обеспечивает следующие режимы работы: режим кругового обзора; контрольный режим; режим трассовых измерений.
Выбор анализируемых компонент определяется преобладающими загрязнителями, характерными для промышленного центра, в котором будет установлен лидар. Так, например, определяющими загрязнителями в г. Москве являются окиси азота NO2 и окись серы SO2, выбросы которых от ТЭЦ могут составлять ежегодно сотни тонн.
Режим кругового обзора предназначен для непрерывного контроля на территории радиусом до 10 км. При этом производится измерение азимута и расстояния до загрязненного участка, распределение концентраций примеси в атмосфере.
Измерение концентраций окиси серы SO2 и окиси азота NO2производится дифференциальным методом на следующих длинах волн:
λ1 = 307,5 нм λ2 = 308,7 нм для SO2
λ3 = 446,0 нм λ4 = 448,1 нм для NO2
Измерение аэрозольного рассеяния производится на длине λ3 или λ4. Время одного обзора определяется минимальным временем жизни выброса и может лежать в пределах от 30 мин до 2 ч.
В режиме трассовых измерений излучение лидара осуществляется в направлении топографических или уголковых отражателей, расположенных в пункте с известными координатами. После отработки целеуказаний производится измерение концентрации загрязнений дифференциальным способом по 50-100 зондирующими импульсами.
Контрольный режим предназначен для проверки работоспособности лидара и его калибровки. С этой целью используется газонаполненная многоходовая эталонная кювета. Такая кювета представляет собой модель оптической трассы с отражателем и газовой смесью известной постоянной концентрации.
По управляющему сигналу с ВУК 12 ЛКО системой наведения 4 осуществляется наведение зондирующего излучения перестраиваемого лазерного передатчика 19 и оси визирования телевизионного визира 3 на исследуемую область по заданному азимуту и углу места.
Телевизионный визир 3 для лидаров относится к телевизионным системам замкнутого типа.
Основное назначение ТВВ - это исключение возможности ослепления лидаром пилотов летательных аппаратов, операторов башенных кранов или других лиц, которые могут попасть в поле действия луча лидара, а также формирование сигналов о наведении лидара на яркий источник света (солнце, фонари и т.д.). С целью предотвращения выхода из строя высокочувствительных приемников перед фотокатодом ТВ трубки расположена турель со сменными светофильтрами (для обеспечения работы визира как в ночное, так и в дневное время суток) и быстродействующий затвор, позволяющий исключить выход из строя ТВ камеры при случайном наведении на яркий источник света.
ТВВ снабжен селектором контраста и селектором движущихся целей, что позволяет автоматизировать процесс наведения.
При срабатывании блоков автоматической селекции подвижных и высококонтрастных объектов через ВУК происходит автоматическая блокировка запуска передатчика.
По сигналам с ВУК 12 ЛКО обеспечивается управление ТВВ 3 в части задания режимов работы, ввода пороговых скоростей, селекции движущихся объектов и уровней контраста выделяемых объектов.
От перестраиваемого лазерного излучателя 9 в систему наведения лазерного луча поступает излучение, включающее в себя следующие длины волн:
λ3 = 307,7 нм λ4 = 308,4 нм для SO2
λ1 = 446,9 нм λ2 = 448,1 нм для NO2
Для измерения аэрозолей используется излучение с длиной волны излучения λ1 = =446,9 нм и λ2. Длительность импульсов измерения составляет 20÷30 нм с поочередным режимом генерации на каждой из длин волн с периодом 0,01 с.
Основная часть излучения перестраиваемого лазерного излучателя 9 через целостное зеркало системы 4 наведения направляется на выбранное направление. Управление положением целостного зеркала осуществляется от электромеханического привода системой 4 наведения по сигналам с ВУК.
Система 4 наведения построена по азимутально-угломерной схеме, в которой текущее угловые координаты сравниваются с программой, выдаваемой ВУК 12. Сигнал рассогласования действует до тех пор, пока программные и текущие координаты не станут одинаковыми.
За счет смены во времени кодов программных координат ВУК 12 осуществляет программное управление системой 4 наведения, реализуя режимы кругового обзора или наведения на трассовые реперы.
Излучение перестраиваемого лазерного излучателя 9, рассеянное исследуемыми газовыми и аэрозольными компонентами атмосферы, в обратном направлении поступает через целостное зеркало системы 4 наведения лазерного луча в оптическую приемную антенну 5. Рассеянное излучение собирается приемным объективом, выполненным по схеме Максутова, и поступает в оптико-механический блок (ОМБ) 6, ОМБ 6 осуществляет сжатие динамического диапазона принимаемого рассеянного сигнала. При дальности действия лидара до 15 км задержка по времени между сигналами с минимального и максимального расстояний составляет величину 10-4 с. За это время величина оптического сигнала изменяется на 6-8 порядков.
ОМБ осуществляет также необходимые оптические коммутации, фильтрацию и преобразование пространственных характеристик световых пучков. Сформированное до необходимых пространственных характеристик в систему 7 приема и обработки сигнала.
Система 7 приема и обработки лидарного сигнала предназначена для измерения уровня принимаемого рассеянного (или отраженного от топографического или оптического репера) светового излучения.
Измерение концентрации SO2 окиси серы и NO2 окиси азота на каждом анализируемом азимутальном направлении производится по сериям из N1 и N2двухволновых зондирующих посылок.
При измерении концентрации SO2 ВУК 12 выдает на систему приема и обработки сигнала команду на начало первой серии измерений и на установление признака режима измерения концентрации SO2. Результаты измерений, получаемых после каждой посылки двухволновых зондирующих импульсов, выдаются в ВУК 12. После набора заданного числа измерений в серии ВУК 12 выдает на систему приема и обработки команду "Сброс".
Аналогичным образом происходит измерение концентрации окиси азота NO2. Моменты измерения уровней загрязнения привязываются к системе единого времени с погрешностью ± 1 с системой 14 синхронизации частоты времени.
Обнаружение факта повышенного аэрозольного загрязнения в какой-либо ячейке дальности осуществляется по наличию и величине передачи сигнала, отраженного с данной ячейки дальности. При измерении аэрозольного рассеяния локационным методом выбирают длину волны в окне прозрачности атмосферы, чтобы пренебречь поглощением газовых компонент. Учитывая, что спектральный ход аэрозольных рассеяний зависит от спектра размеров аэрозольных частиц при двухволновом зондировании, можно судить о качественном изменении состава аэрозолей по изменению отношения сигналов на двух длинах волн. Величину аэрозольного рассеяния можно определить, осуществляя калибровку измерительной трассы по романовскому рассеянию этой трассы на молекулах азота, концентрация которого у поверхности Земли известна.
Процесс обработки измеренной информации осуществляется в ВУК 12 и включает в себя усреднение массива измеренных величин, расчет концентрации контролируемых компонент вдоль линии излучения лазерного излучателя, привязку измеренных концентраций к цифровой карте обследуемого района и выдаче той карты на экран дисплея 11 с указанием цифровой карты города или промышленного центра и на графопостроитель 13 с указанием изолинии, равной концентрации, и цветных полей, соответствующих определенным уровням загрязнения. В процессе обработки информации происходит формирование информационной адресной посылки для внешних потребителей, а также расчет целеуказаний для подвижного лидара. Исходная информация представляет собой два ряда чисел, соответствующих величине сигналов, принимаемых фотоприемным устройством системы 7 приема и обработки сигнала после излучения пары зондирующих импульсов с длинами волн λ1 и λ2 для SO2 и λ3 и λ4 для NO2.
При измерении концентрации, например SO2, излученному импульсу на 1 будет соответствовать последовательность чисел аi, а импульсу на λ4 - последовательность bi при i = 1...n, которые затем запоминаются.
Для повышения точности измерений производят несколько зондирований по данному направлению и получают последовательности чисел
ai = a1a2...an
bi = b1b2...bn
Затем производят скользящее суммирование членов результирующих последовательностей по К числам с шагом усреднения от К = 3 до К = 10.
После процесса усреднения получаем для каждой пары длин волн два ряда чисел
ai' = a1'a2'...a'(n-K)
bi - b1'b2'...b'(n-K)
Распределение концентрации примесного газа в атмосфере по трассе зондирования в зависимости от дальности определяется по формуле
N =  , где ΔZ - величина строба по дальности;
, где ΔZ - величина строба по дальности;
i, j - номер чисел в ряду;
Δσ - дифференциальное сечение поглощения SO2 или NO2.
Для определения относительной величины аэрозольного загрязнения атмосферы используется отраженный сигнал на λ3 или λ4 и определяется по формуле  =
=  exp[2Σ(Z-Zo)], где Z - текущее значение дальности;
exp[2Σ(Z-Zo)], где Z - текущее значение дальности;
Zo - значение опорной дальности;
βπ - коэффициент обратного рассеяния;
ε - показатель ослабления за счет
рассеяния аэрозолями;
n*(Zo) - нормированный опорный сигнал;
n*(Z) - нормированный сигнал.
Определяют и запоминают азимут и угол места до рассеивающего объема. Привязывают все измерения к единой шкале времени. Далее сравнивают распределение концентрации примесного газа по дальности с предельно допустимой концентрацией загрязняющих веществ на заданном направлении. Определяют координаты рассеивающего объема, которые затем отождествляют с координатами предполагаемого источника выброса с учетом скорости и направления ветра. После завершения съема панорамы загрязнения информация выводится на дисплей 11 и графопостроитель 13 в виде изолиний концентраций. При этом зоны, в которых концентрация превышает предельно допустимую (ПДК), выделяются цветом. На дисплей 11 также выводится информация о дальности и азимуте до рассеивающего объема.
С целью увеличения дальности действия при непрерывном круговом обзоре зондирующее излучение направляют на оптические или топографические отражатели с известными координатами.
Трассы должны быть выбраны при заданном положении лидара таким образом, чтобы вынос выброса от потенциальных источников в городе был наиболее вероятен при любых возможных направлениях ветра. На трассе длиной 7-20 км целесообразно устанавливать уголковые отражатели по концентрическим окружностям.
После отработки целеуказаний в режиме трассовых измерений производится измерение концентрации загрязнений дифференциальным методом по 50-100 зондирующим импульсов.
Результат, полученный в виде среднего значения концентраций по данной трассе, хранят в памяти ВУК 12.
В памяти ВУК 12 хранятся все координаты имеющихся трасс, а также скорость и последовательность их опроса.
Метрологическая аттестация лидаров осуществляется в блоках 8 и 20 калибровки путем замера эталонных газовых смесей, содержащихся в многоходовые оптических кюветах при регламентных работах. Многоходовая оптическая кювета представляет собой модель оптической трассы с отражателем и газовой смесью известной концентрации. При правильной работе лидара измеренные значения концентрации газа в кювете должны с заданной погрешностью совпадать с реальной концентрацией. Калибровка сигналом от лазерного излучателя осуществляется путем ответвления части излучения через блок калибровки.
При помощи объектива, волоконного световода и оптического переключателя ответвленное излучение вводится в ход оптического канала в ОМБ. Газовая кювета обеспечивает известное соотношение ослабления излучений на парах волн λ1 λ2 и λ3 λ4. Сравнивая результаты измерений концентраций SO2, NO2 и аэрозольного ослабления с известными, можно получить для лидара тарировочные поправки. Для получения полной картины работы лидара калибровочные измерения необходимо провести при различных уровнях лидарного калибровочного сигнала. С этой целью на выходе кюветы предусмотрен набор нейтральных фильтров с известными коэффициентами ослабления.
Вычислительно-управляющие комплексы 12 и 27 предназначены для управления системами 19 и 4 наведения, лазерными излучателями 9 и 18, системой управления приводом, системой 7 приема и обработки сигнала, телевизионными визирами 3 и 22. ВУК 12 и 28 также обеспечивают обработку информационного сигнала, передачу данных внешних потребителей, контроль и диагностику функционирования подсистем лидара.
Задачи ВУК в части управления системой наведения включают выбор того или иного режима наведения, автоматический ввод в систему значений положения ОПУ (опорно-поворотное устройство), скорость движения, время остановки. На ВУК от системы наведения поступает информация об угловом положении ОПУ, а также контрольная информация для обеспечения диагностического контроля.
ВУК обеспечивает включение лазерного излучателя в соответствии с заданной временной диаграммой, обеспечивающей проведение измерений методами дифференциального поглощения и локационным. Между лазерным излучателем и ВУК осуществляется обмен информацией. С ВУК на лазерный излучатель поступает код команд для лазерного излучателя, а в обратную сторону - подтверждение выполнения команд.
ВУК 12 выдает на систему 7 приема и обработки сигнала следующую информации: режим работы лидара; тип контролируемого компонента; сигнал о чрезмерной засветке фотокатода; дополнительную информацию (дневная или ночная работа, величина разрешения по дальности, число импульсов, по которым производится усреднение и т.п.).
На ВУК 12 системы 7 приема и обработки сигнала поступает информация о готовности системы к выполнению заданного режима работы; измеренный уровень рассеянного излучения с выборкой по дальности или средний уровень принятого сигнала при работе в трассовом режиме; относительное значение уровня зондирующего излучения; текущее время измерения.
К моменту одного обзора в памяти ВУК 12 формируется массив информационных кадров, содержащих координаты точек, лежащих на направлении измерений, и величины концентрации загрязнений, соответствующих этим точкам. Полученный массив преобразуется в сообщение, которое через систему 10 передачи целеуказаний лидара дифференциального поглощения по каналу связи поступает в систему 17 приема целеуказаний устройства для многокомпонентного анализа. По каналу радиосвязи передается следующая информация для устройства для многокомпонентного анализа: координаты места стоянки; углы поворота системы наведения; предлагаемый источник выброса; направление и скорость ветра.
В качестве устройства для многокомпонентного анализа воздуха может быть использован лидар комбинационного рассеяния. Лидар комбинационного рассеяния по спектрам комбинационного рассеяния света позволяет одновременно измерять концентрации нескольких газовых компонентов атмосферу в силу специфичности спектрального сдвига линий комбинационного рассеяния для различных веществ.
Методика измерения концентрации газов по комбинационному рассеянию лазерного излучения состоит в следующем. Измеряют величину сигнала nx на длине величины, соответствующей романовскому сдвигу для исследуемого газа, и проводят нормировку на сигнал no романовского рассеяния на азоте, концентрация которого No известна. В результате для измеряемой величины концентрации получается выражение
Nx=m , где m - отношение аппаратурных констант для λ0 и λ1;
, где m - отношение аппаратурных констант для λ0 и λ1;
σo - сечение комбинационного рассеяния для азота;
σx - сечение комбинационного рассеяния для исследуемого газа.
Предполагается, что весь спектр регистрируется одновременно, т.е. излученная в процессе измерения энергия лазера одинакова для всех спектральных компонентов, а величина прозрачности атмосферы постоянна в пределах романовского спектра.
Длины волн излучения, используемые в лидаре комбинационного рассеяния, необходимо выбирать в "солнцеслепой" области спектра, что позволяет обеспечивать высокое отношение сигнал/шум даже при работе в дневное время. Наиболее оптимальная длина волны для ЛКР 1 составляет 273 нм. Используемые в ЛКР 1 система 19 наведения лазерного луча, оптическая приемная антенна 21 и ТВ визир 22 идентичны системам, используемым в ЛКО 1. По целеуказаниям, полученным с ЛКО 1, ЛКР 2 определяет свои координаты с помощью устройства 16 определения координат, передает сигнал на ВУК 27 ЛКР. Так же как у ЛКО 1 осуществляется наведение рабочего поля зрения ЛКР 2 на заданное направление использованием ТВ визира 22. При отсутствии мешающих факторов через ВУК 27 ОКР на лазерный излучатель 18 поступает команда на зондирование заданного направления. Затем рассеянное излучение через целостатное зеркало системы 19 наведения и оптическую приемную антенну 21 поступает в спектроанализатор 23. Спектроанализатор 23 выполнен по трехкаскадной схеме. Все три каскада собраны по несимметричной горизонтальной схеме Эберта-Фасти, которая позволяет получить высокое спектральное разрешение за счет компенсации комы.
Со спектроанализатора 23 сигнал поступает на фотоприемное устройство 24, выполненное на базе электронно-оптического преобразователя и постоянно-запоминающего устройства. С выхода фотоприемного устройства 24 сигнал, соответствующий определенной дальности и частоте, поступает на ВУК 27 ЛКР.
По окончании сеанса измерений информация обрабатывается по заданной программе в ВУК 27. ВУК 27 решает те же задачи, что и ВУК 12 лидара дифференциального поглощения. Результаты измерений с помощью системы 25 синхронизации частоты времени привязываются к системе времени. Обработанная информация содержит названия обнаруженных веществ, величины измеренных концентраций для каждой дальности зондирования на данном азимуте и угле места. В выходную информацию впечатается также время измерения, число, месяц, год, координаты места наблюдения, дальность. Вся выходная информация выводится на экран дисплея 26.
Система контроля загрязнения воздуха по сравнению с прототипом позволяет автоматизировать контроль загрязнения воздушного бассейна. В прототипе система анализа для определения загрязнений воздуха или воды используется среды в районах катастроф (взрывы, пожары, утечки газов и т.д.).
Оптическая система контроля загрязнения воздуха позволяет обеспечить непрерывный обзор (днем и ночью) пространства контролируемого региона для построения панорам и карт загрязнений и определение источников загрязняющих выбросов; определение максимально возможного количества компонент загрязнителей; детальный обзор пространства для определения параметров поведения загрязняющих выбросов (азимут, дальность действия, размер и скорость рассасывания выбросов и т.д.); максимально возможную дальность действия; высокую точность измерения; автономность контроля заданного уровня контролируемого пространства; обработку результатов измерений в режиме реального времени; отождествление и привязку результатов измерений к конкретным источникам выбросов; привязку результатов измерений к системе единого времени.
Для того, чтобы оптическая система контроля действительно стала орудием в борьбе за чистоту атмосферы и явилась непреодолимым заслоном на пути загрязняющих выбросов необходимо решить следующие проблемы: юридическо-правовую состоящую в однозначном отождествлении источников выбросов, позволяющем применять штрафные или другие санкции; проблему метрологического обеспечения лидарного комплекса.
Юридическо-правовая проблема, т.е. однозначное отождествление источника выбросов, решается в оптической системе анализа путем сопоставления результатов измерений ЛКО и устройства для многокомпонентного анализа с привязкой их к цифровой карте города, на которой обозначены источники и состав выбросов с привязкой их к наиболее близко расположенным источникам выброса. В случае неоднозначности отождествления источника используется пеленгация выбросов с двух или нескольких точек наблюдения. Результаты измерения привязываются к системе единого времени.
Проблема метрологического обеспечения решается путем предсеансной самопроверки и калибровки системы. Метрологическая аттестация производится при регламентных работах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ВЫБРОСА | 1991 |
|
RU2028007C1 |
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2122699C1 |
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2123165C1 |
| УСТРОЙСТВО ДЛЯ НАБЛЮДЕНИЯ ОБЪЕКТОВ | 2004 |
|
RU2263931C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| МНОГОКАНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2617459C1 |
| ДАЛЬНОМЕРНО-ВИЗИРНЫЙ ПРИБОРНЫЙ КОМПЛЕКС | 2010 |
|
RU2437051C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ | 2009 |
|
RU2410629C1 |

Использование: для дистанционного зондирования газообразных компонент и аэрозолей, а также позволяет обеспечить непрерывный автоматизированный контроль загрязнения воздушного бассейна, определять максимальное количество компонент с высокой точностью и на большой дальности. Сущность изобретения: оптическая система контроля содержит лидар дифференциального поглощения и устройство для многокомпонентного анализа воды. Лидар дифференциального поглощения содержит последовательно установленные на ходу отраженного излучения систему наведения, оптическую приемную антенну, оптико-механический блок (ОМБ) и систему приема и обработки сигнала. Выход перестраиваемого лазерного излучателя через оптический коммутатор одновременно оптически связан с входом системы наведения и с входом блока калибровки, выход которого соединен с вторым входо ОМБ, при этом выход системы наведения через поворотное зеркало оптически связан с входом телевизионного визира (ТВВ), входы-выходы вычислительно-управляющего комплекса (ВУК) через магистраль обмена соединены с соответствующими входами-выходами ТВВ, ОМБ, системы наведения, перестраиваемого лазерного излучателя, системы передачи целеуказаний, графопостроителя и системы синхронизации частоты времени. В устройстве для многокомпонентного анализа воздуха система наведения, оптическая приемная антенна, спектроанализатор и фотоприемное устройство последовательно установлены по ходу принимаемого излучения, выход лазерного излучателя через оптический коммутатор одновременно оптически связан с входом системы наведения и с входом блока калибровки, выход которого соединен с входом спектроанализатора, выход системы наведения через поворотное зеркало оптически связан с входом телевизионного визира, при этом входы-выходы системы определения координат, системы определения координат, системы приема целеуказаний, телевизионного визира, системы наведения, лазерного излучателя, фотоприемного устройства и системы синхронизации частоты времени соединены с соответствующими входами-выходами ВУК, а система передачи целеуказаний лидара дифференциального поглощения по каналу связи связана с системой приема целеуказаний устройства для многокомпонентного анализа. 3 з.п. ф-лы, 2 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ измерения коэффициента преломления диэлектрических и полупроводниковых пленок | 1986 |
|
SU1392466A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
