Изобретение относится к машиностроению и может быть использовано при создании гибких автоматизированных производств (ГАП), например, на предприятиях электротехнической и приборостроительной промышленности типа научно-производственного концерна - объединения [НРК(О) "Энергия"], преимущественно для автоматизированного производства электроаппаратов и электрических машин малой мощности.
Известны ГАП, содержащие связанное с системой управления технологическое оборудование.
Недостатком известного аналога является ограниченные технические возможности и производительность для многоуровневого производства с ситуационным управлением, что исключает их применение, например, для комплексной автоматизации многономенклатурного производства электроаппаратов и электрических машин малой мощности, в котором требуется реализация режимов многопроцессной обработки в составе автоматизированных линий и участков, настраиваемых с учетом изменяющихся локальных ситуаций при форсированной обработке изделий и (или) их элементов технологическими растворами по приоритетам запуска (выпуска) и устанавливаемым пределам прибыли.
Известно также принятое за прототип ГАП, содержащее автоматизированную транспортно-накопительную систему (АТНС), автоматизированные рабочие места (АРМ) и технологическое оборудование, связанные через блоки управления и питания с токоподводами (авт. св. по заявке N 4857461/02, С 25 D 21/12, 1990).
Недостатком прототипа является его ограниченные технологические возможности и производительность из-за отсутствия в нем элементов для форсированного изменения электрохимических свойств технологических растворов в зонах воздействия ими на объекты обработки.
Целью изобретения является расширение технологических возможностей и повышение производительности.
Цель достигается тем, что гибкое автоматизированное производство (ГАП), содержащее автоматизированные транспортно-накопительные системы, автоматизированные рабочие места и технологическое оборудование, связанные через блоки управления и питания с токоподводами, снабжено дополнительными электродами и пьезокерамическими элементами, расположенными в активаторах и выполненными в виде введенных друг в друга цилиндров со смещенными на угол 0о <α< 180о отверстиями, связанными блоком сопряжения и синхронизации с пьезокерамическими элементами и электродами графопостроителя, а через устройство ситуационного управления - с автоматизированным центром получения прибыли (АЦПП) и автоматизированными рабочими местами (АРМ).
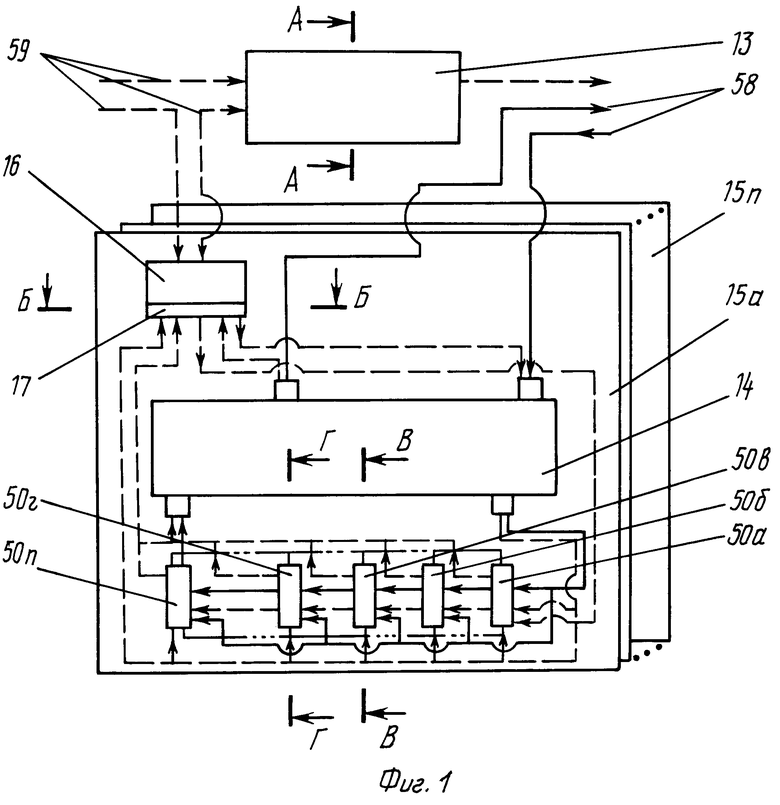
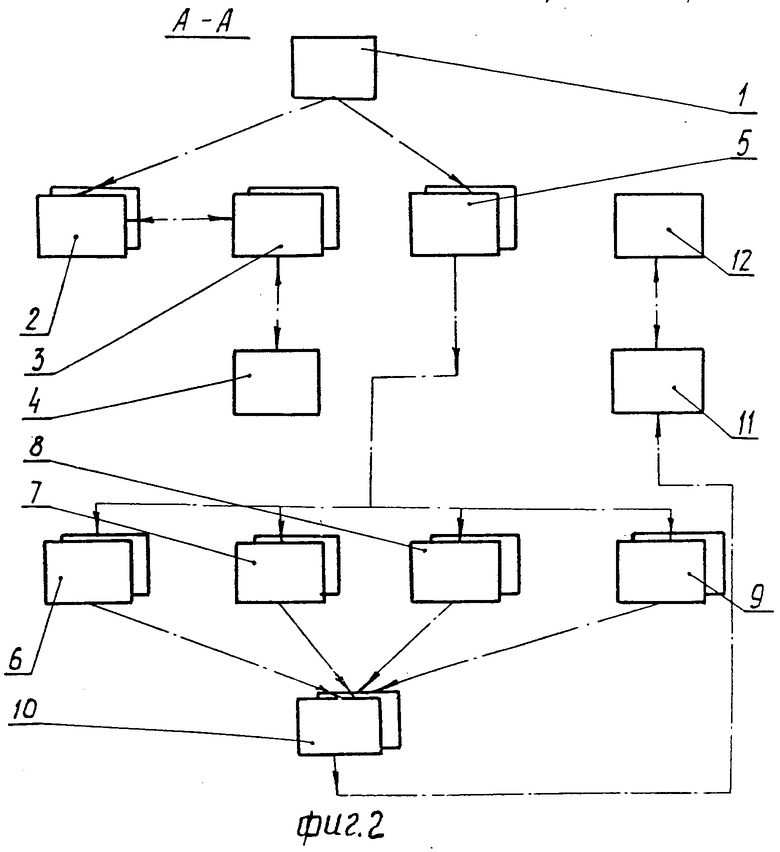
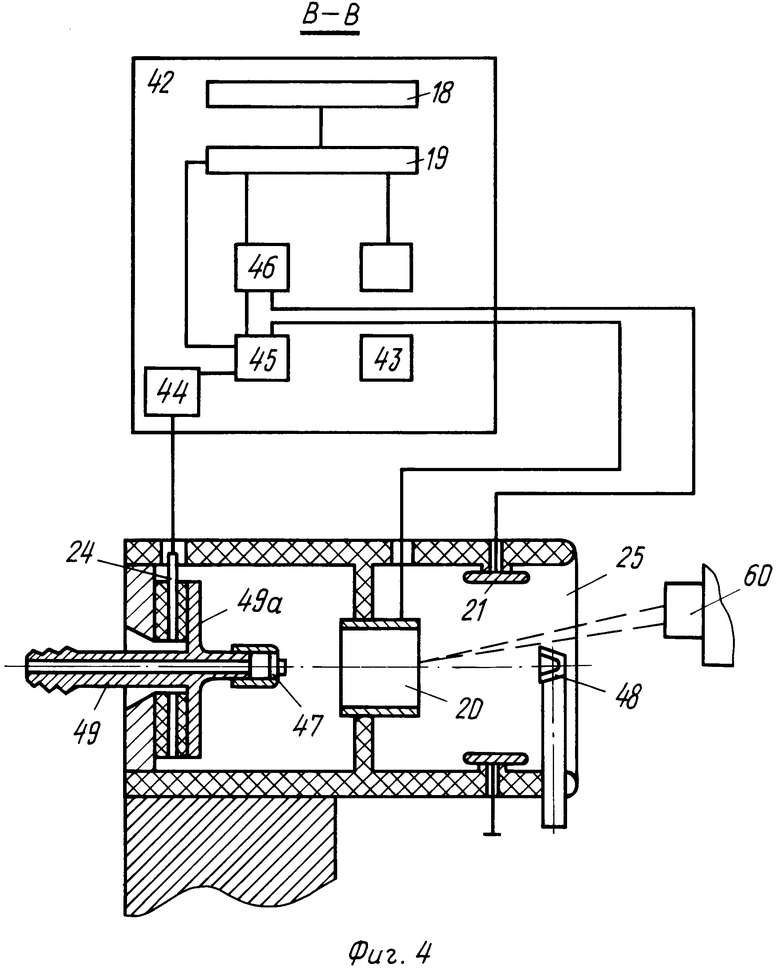
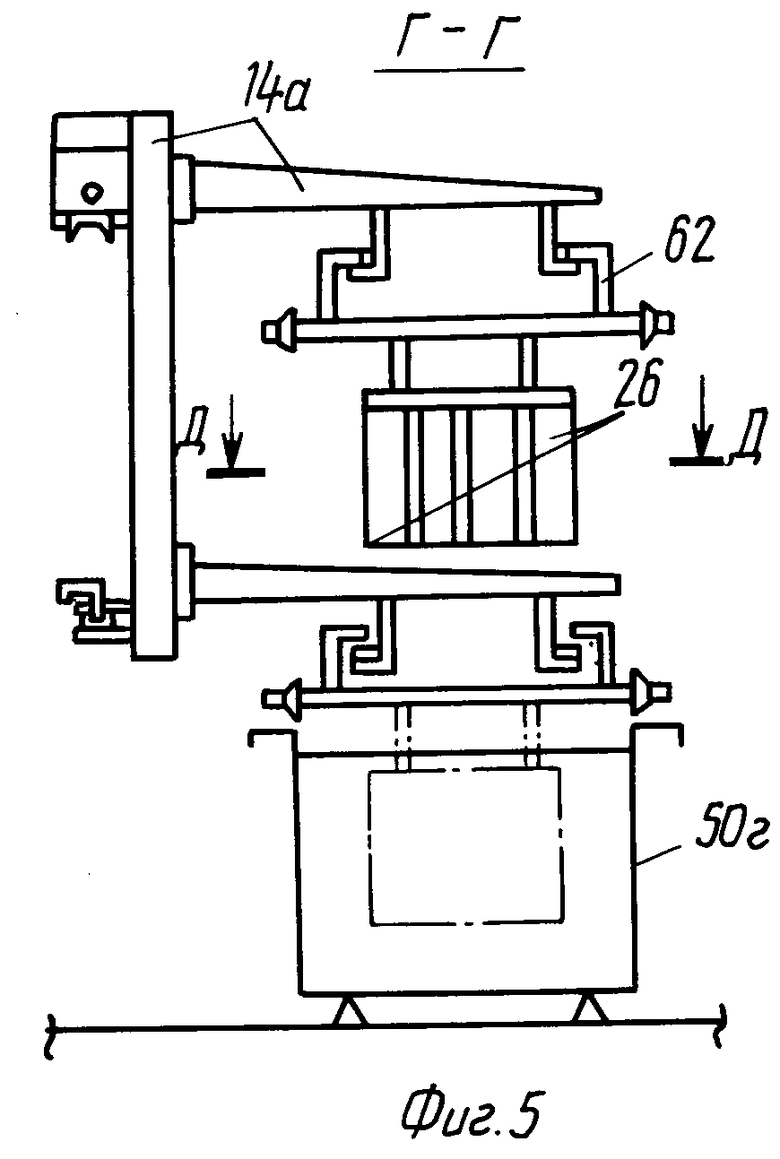
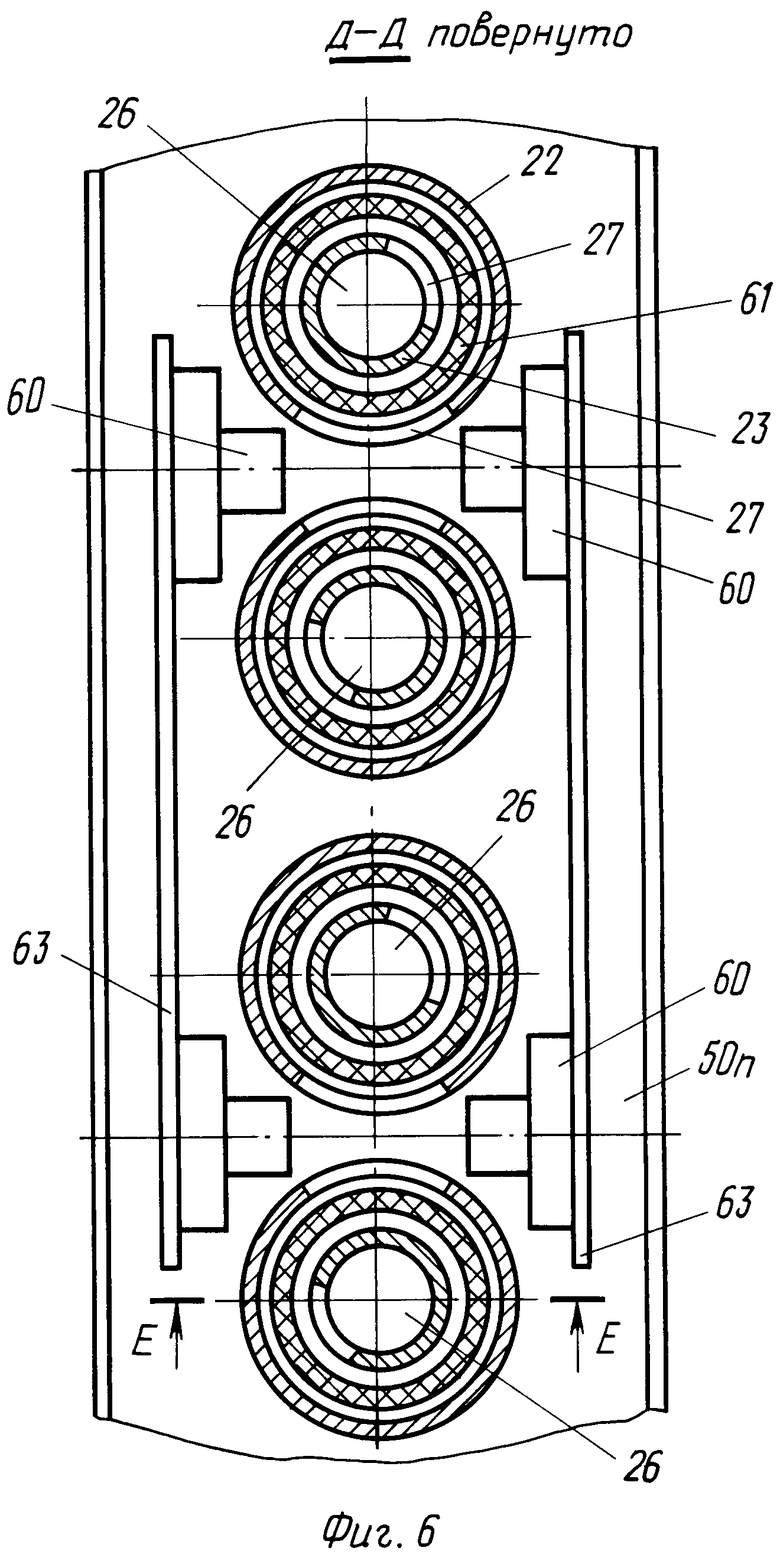
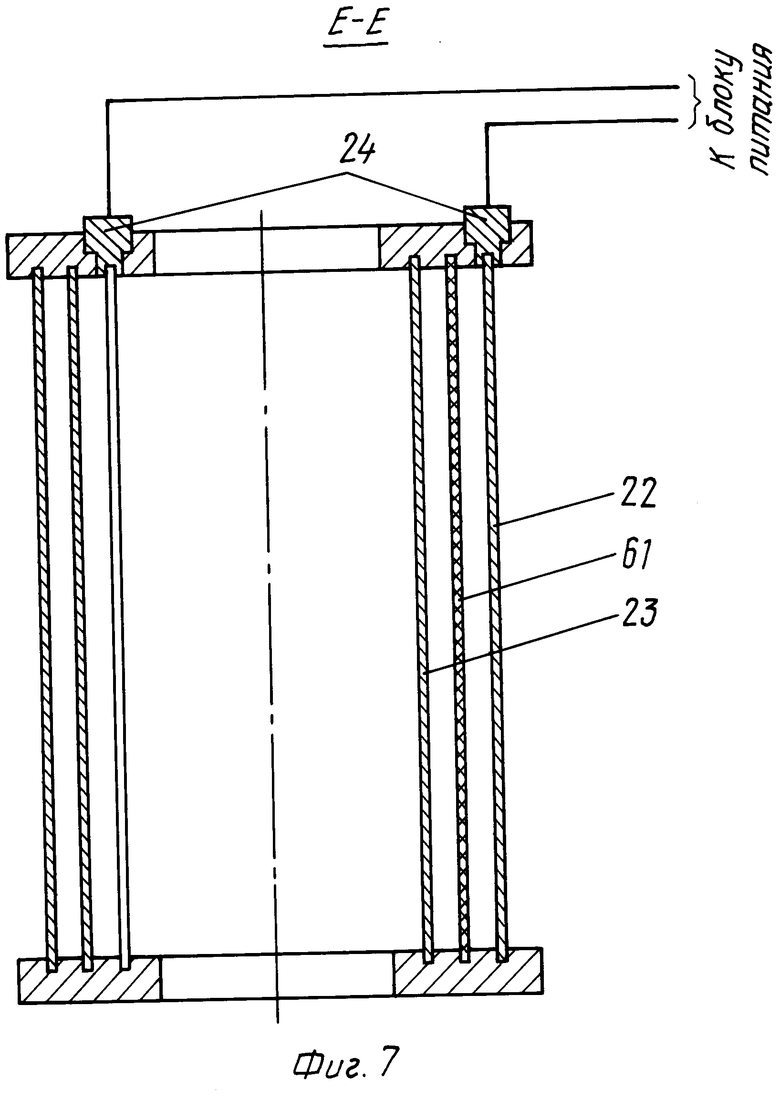
На фиг.1 показан общий вид ГАП; на фиг.2 - разрез А-А фиг.1; на фиг.3 - разрез Б-Б на фиг.1; на фиг.4 - разрез В-В на фиг.1; на фиг.5 - разрез Г-Г на фиг.1; на фиг. 6 - разрез Д-Д фиг.5; на фиг.7 - разрез Е-Е на фиг.6; на фиг. 8 - структурно-математическая модель ГАП; на фиг.9 - временные диаграммы ситуационного управления.
Предлагаемое ГАП содержит АРМ 1-12 автоматизированной системы обеспечения функционирования (АСОФ) 13, связанной с АТНС 14 автоматизированного научно-производственного комплекса (АНПК) 15-15n через управляющий вычислительный комплекс (УБКС) 16 и устройство ситуационного управления 17.
АТНС 14 снабжена роботами 14а, а устройство ситуационного управления 17 сопряжено через блок сопряжения 18 и синхронизатор 19 с электродами 20-23 и пьезокерамическими элементами 24 рабочих органов графопостроителей 25 и активаторов 26.
Активаторы 26 выполнены в виде введенных друг в друга цилиндров, совмещенных с электродами 22, 23, отверстия 27 которых развернуты относительно друг друга на угол 0 < α< 180о, и сопряженных с пьезокерамическими элементами 24. Устройство ситуационного управления 17 содержит первый и второй регистры 28, 29, первый, второй и третий блоки памяти 30-32, блок элементов И 33, схему управления 34, счетчик адреса 35, генератор тактовых импульсов 36 и блок управления 37 на базе элементов ИЛИ 38 и И 39, соединенных между собой и связанных информационными входами 40 и выходами 41 с АРМ 1-12.
Рабочий орган графопостроителя 25 соединен с блоком управления 42 через блок управления подачей красителя 43, высоковольтный блок питания 44, знакогенератор 45 и генератор напряжения синхронизации каплеобразования 46, связанных с УВКС 16 через синхронизатор 19 и блок сопряжения 18. Знакогенератор 45 и генератор напряжения синхронизации каплеобразования 46 соединены соответственно с электродами 20 и 21, закрепленными в рабочем органе графопостроителя 25 между соплом 47 и ловушкой 48. Сопло 47 посажено на форсунку 49, соединенную с ультразвуковым вибратором 49а и пьезокерамическими элементами 24, связанными с высоковольтным блоком питания 44 и с блоком управления подачей красителя 43.
Технические агрегаты 50а-50п, к числу которых относятся и те, в которых используются графопостроители 25 и активаторы 26, связаны с АСОФ 13 через АТНС и УВКС 16, замкнутых на АРМ 1-12.
Связь АРМ 1-12 между собой выполнена в виде развитой функциональной информационной сети гибкого автомати- зированного производства, образующего концерн-объединение, в котором в пользовании президента находится АРМ 1, президентского совета - АРМ 2, совета представителей - АРМ 3, ревизионной комиссии - АРМ 4, исполнительной дирекции - АРМ 5, функциональных АНПК - АРМ 6, предметных АНПК - АРМ 7, территориальных АНПК - АРМ 8, АНПК "Пpибыль" - АРМ 9, АЦПП - АРМ 10, автоматизированной системы самокредитования (АСС) - АРМ 11 и автоматизированного коммерческого банка (АБК) - АРМ 12.
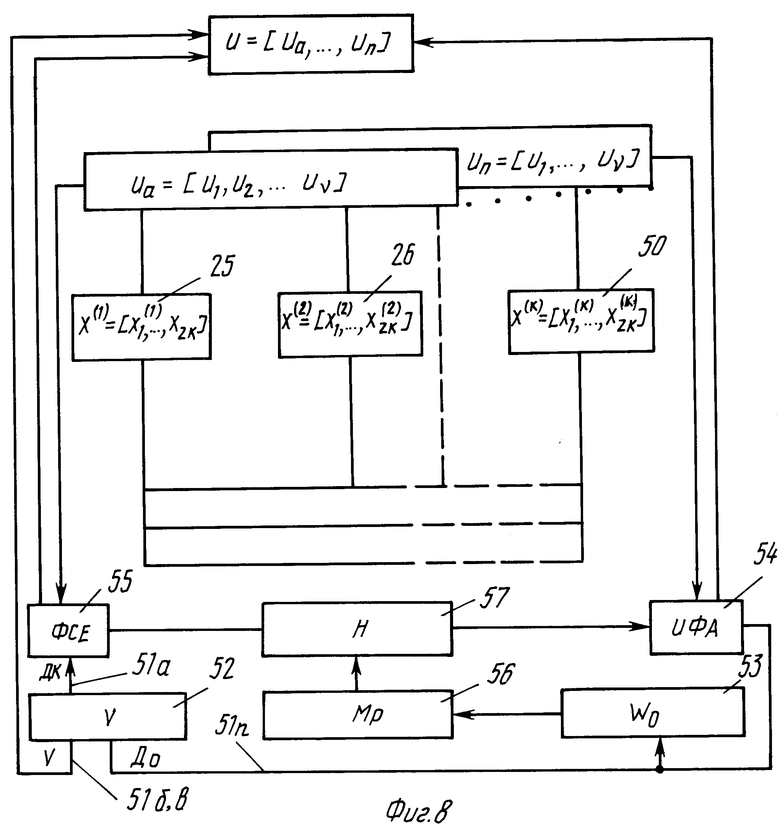
Математическая модель такой функционально-информационной сети и структуры ГАП учитывает все воздействия 51а-51n внешней системы 52, направленные на систему 53 внешнего потенциала ГАП, систему 54 централизованных фондов и систему 55 фондов самостоятельных структурно-функциональных единиц с выходом на систему 56 рынка и систему 57 налогообложения. Причем этой моделью, во-первых, не регламентируется порядок и последовательность прохождения материальных и информационных потоков 58, 59, включая и сами объекты обработки 60. Во-вторых, дискретность функций активаторов 26, обусловленная конструкцией, электрическими и кинематическими связями их пьезокерамических элементов 24, сопряженных с электродами 22, 23, и кинематическими связями электродов 22, 23, разгороженных полупpоницаемыми мембранами 61, и подвесов 62 для их транспортных перемещений и фиксации относительно объектов обработки. В-третьих, дискретность функций, связанных с тpанспортным перемещением и фиксацией подвесов 63 с объектами обработки 60 относительно активаторов 26 и (или) графопостроителей 25.
Работа ГАП осуществляется в режимах многовариантного интерактивного управления. Один из возможных вариантов работы осуществляется в следующей последовательности.
АСОФ 13 через УВКС 16 выдает соответствующие команды АТНС 14 на порядок и последовательность перемещения роботов 14а (являющимися составной частью АТНС), фиксации и выдержки подвесов 62, 63 с объектами обработки 60 между технологическими агрегатами 50а-50п. Одновременно выдается соответствующие команды на порядок и последовательность функционирования технологических агрегатов 50а-50n, графопостроителей 25 и активаторов 26.
Локальное воздействие технологическими растворами на объекты обработки 60 осуществляется в следующей последовательности. Команда проходит через блок сопряжения 18 и синхронизатор 19 на включение генератора напряжения синхронизации каплеобразования 46, знакогенератора 45 и высоковольтного блока питания 44. Он них поступают управляющие электроимпульсы на пьезокерамические элементы 24 ультразвукового вибратора 49а и незаряжающий электрод 20 графопостроителя 25. Ультразвуковой вибратор 49а создает пульсирующее давление в сопле 47 и формирует скорость истечения струи технологического раствора, подаваемого через форсунку 49. Струя технологического раствора после сопла 47 дробится на капли, каждая из которых избирательно заряжается за счет электростатического потенциала в заряжающем электроде 20 и далее, пролетая между пластинами электрода 21 к объекту обработки 60, отклоняется от своей траектории на величину, пропорциональную ее заряду. Незаряженные капли не отклоняются от начальной траектории и попадают в ловушку 48 системы рециркуляции технологических растворов (не показаны). Благодаря запрогpаммированной последовательности отклонения капель технологического раствора форма и размеры рисунка, образуемого каплями, могут изменяться как непрерывно, так и дискретно.
Процесс последующего форсированного воздействия технологическими растворами на объекты обработки 60, вводимые в технологические агрегаты 50г роботами 14а на подвесах 63, осуществляется активаторами 26 после ввода их теми же роботами 14а на подвесах 62 в зону между подвесами 63.
От блока питания (не показан) активаторов 26 напряжение питания, сформированное в соответствии с поступающими на блок питания управляющими сигналами от блока управления (не показан) через пьезокерамические элементы 24 подается на электроды 22, 23.
При этом в зависимости от характеристик объектов обработки 60 (габаритные размеры, материалы, количество объектов на подвесах 63 и т.п.) напряжение питания дополнительно корректируется пьезокерамическими элементами 24, которые кинематическими связями (не показаны) соединены с подвесами 63 и через них с объектами обработки 60.
При прохождении электротока между электродами 22, 23 технологический раствор диссоциирует на ионы гидроксила ОН и водорода Н+. Перемещение отрицательных ионов к положительному полюсу и положительных ионов к отрицательному полюсу сопровождается их интенсивным движением через отверстия 27 и ростом их концентрации с разных сторон полупроницаемой мембраны 61 до запрограммированных значений. При этом наибольшая концентрация требуемых ионов обеспечивается в зоне расположения объектов обработки 60 на подвесках 63, между которыми вводятся активаторы 26 на подвесах 62.
Программируемая последовательность направленного изменения электрохимических свойств технологических растворов устанавливается с учетом программируемой последовательности, описываемой системой из К взаимно связанных динамических объектов
U = [Ua,...Un] = 





[U1, U2,...Uν] = 

X Zk =
Zk = V·Wk= H+Do+
V·Wk= H+Do+ Dki где U - обобщенная техническая характеристика объекта;
Dki где U - обобщенная техническая характеристика объекта;
Х(1)...Х(k) - значения, характеризующие программируемые режимы обработки;
Хr1(1). ..Xrk(k) - значения, регламентирующие программируемые режимы по величине задаваемой прибыли.
V - входные воздействия;
W - потенциал совокупности объектов управления как самостоятельных единиц;
Z - продукция объектов управления и их комплексов (центров прибыли);
Н - налоговые отчисления;
Дк - дивиденды комплексов (центров прибыли);
До - дивиденды объединения-концерна;
По - прибыль объединения-концерна.
Программы направленного изменения ситуаций в пределах регламентируемой прибыли реализуются с учетом длительности циклов поиска заданного класса эквивалентности, к которому принадлежит некоторое множество соответствующих текущих ситуаций, индуцирующих одинаковые решения.
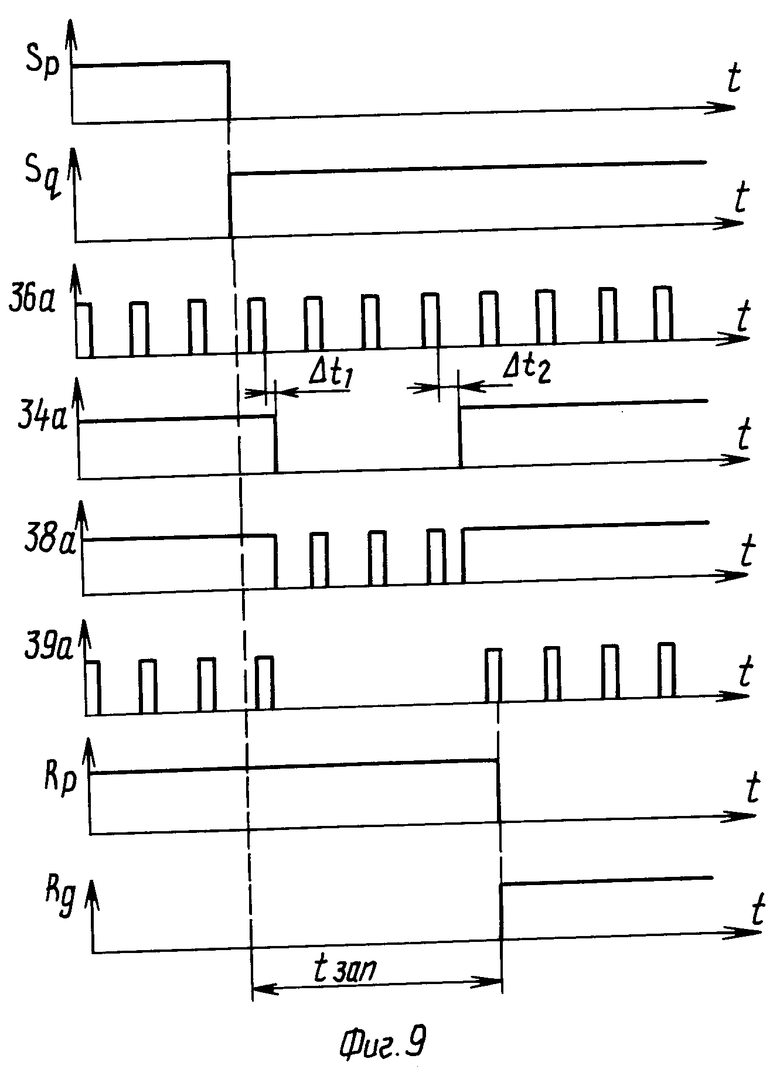
Коды ситуации (двоичные векторы) от объектов управления 14, 25, 26, 50а-50n и др. поступают на информационные входы первого регистра 28. В момент окончания поиска предыдущей команды управления на входах блока 37 управления появляется сигнал с уровнем логической единицы со схемы 34 сравнения, открывающей элемент И 39 в блоке 37 управления, и по заднему фронту очередного импульса от генератора 36 происходит запись кода команды управления со второго блока 31 памяти во второй регистр 29 и кода текущей ситуации в первый регистр 28. Если класс кода текущей ситуации совпадает с классом кода ситуации, записанной на предыдущем такте, со схемы 34 сравнения по-прежнему поступает сигнал с уровнем логической единицы, и процесс повторяется, пока не изменится класс текущей ситуации. Все это время во втором регистре 29 сохраняется прежний код команды управления.
При изменении кода текущей ситуации, меняющего класс ситуации, снимается логическая единица со входа блока 37, запирается элемент И 39, прекращается запись информации в первый 28 и второй 29 регистры, а по заднему фронту сигнал на выходе из блока 37, формируемого элементом 38, наращивается на единицу содержимое счетчика 35 адреса. Далее по заднему фронту импульсов генератора 36, поступающих через элемент ИЛИ 38 на вход к блоку 35, содержимое счетчика адреса продолжает наращиваться, обеспечивая последовательную выборку информации из первого 30, второго 31 и третьего 32 блоков памяти.
Быстродействие поиска заданного класса эквивалентности зависит от времени запаздывания команды tзап, которое является величиной переменной и не превышает предельное значение времени, равное частному от деления количества классов эквивалентности на частоту генератора импульсов. При этом предельно быстродействие ограничивается задержками распространения сигналов в блоках 32, 33, 34 и 30 и ограничивающих частоту генератора 36 тактовых импульсов.
Возможность работы в режимах многовариантного интерактивного управления с использованием регламентирующего программно-математического обеспечения позволяет обеспечить не только параллельную и(или) последовательную обработку различных групп объектов обработки, но и комбинировать подобные варианты и схемы в различных сочетаниях, в т.ч. и в режимах локального управления, например при пусконаладочных отработках циклов.
Использование предлагаемого ГАП по сравнению с прототипом позволяет, во-первых, не только освоить новые технологии обработки изделий технологическими растворами, но и сократить длительность технологических циклов. Во-вторых, предлагаемое ГАП обеспечивает возможность локального изменения электрохимических свойств технологических растворов путем программируемого подвода электроэнергии в зоны концентрации объектов обработки, что обеспечивает возможность реализации процессов регламентируемых пределах прибыли независимо от партий запуска (выпуска) изделий. В-третьих, предлагаемое ГАП обеспечивает возможность производства новой гаммы изделий, технические характеристики которых могут быть обеспечены только при форсированном локальном изменении электрохимических свойств технологических растворов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ИМИТАЦИИ РАБОТЫ СИСТЕМ ЭЛЕКТРОХИМИЧЕСКОЙ ЗАЩИТЫ И СПОСОБ ОБУЧЕНИЯ C ПРИМЕНЕНИЕМ СТЕНДА | 2018 |
|
RU2678882C1 |
| Гибкое автоматизированное производство | 1990 |
|
SU1749325A1 |
| СИСТЕМА МОНИТОРИНГА ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ ИНФРАСТРУКТУРЫ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2011 |
|
RU2450346C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА МОНИТОРИНГА, ОПОВЕЩЕНИЯ И УПРАВЛЕНИЯ МУНИЦИПАЛЬНОГО И/ИЛИ ОБЪЕКТОВОГО УРОВНЯ ПРИ УГРОЗЕ, ВОЗНИКНОВЕНИИ, В ХОДЕ И ПРИ ЛИКВИДАЦИИ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2015 |
|
RU2605505C1 |
| СИСТЕМА МОНИТОРИНГА БЕЗОПАСНОЙ ЭКСПЛУАТАЦИИ ЗДАНИЙ И ИНЖЕНЕРНО-СТРОИТЕЛЬНЫХ СООРУЖЕНИЙ | 2011 |
|
RU2472129C1 |
| УНИФИЦИРОВАННЫЙ МОДУЛЬ ИНТЕГРАЦИИ ОБЪЕКТОВЫХ КОМПЛЕКСОВ ТЕХНИЧЕСКИХ СРЕДСТВ ОХРАНЫ В ИНТЕГРИРОВАННУЮ СИСТЕМУ ТРАНСПОРТНОЙ БЕЗОПАСНОСТИ | 2010 |
|
RU2436166C1 |
| Комплекс средств автоматизации системы управления войсками (силами) и оружием | 2021 |
|
RU2780557C1 |
| ОБЪЕКТОВАЯ КОММУНИКАЦИОННО-ИНФОРМАЦИОННАЯ СИСТЕМА И СПОСОБ ЕЁ ПРОЕКТИРОВАНИЯ | 2022 |
|
RU2792329C1 |
| ТРЕНАЖЕРНО-ОБУЧАЮЩАЯСЯ СИСТЕМА | 2024 |
|
RU2834774C1 |
| КОМПЛЕКС УНИФИЦИРОВАННЫХ СРЕДСТВ ВОЙСКОВОГО РЕМОНТА | 2010 |
|
RU2427020C1 |
Использование: при создании автоматизированных производств, например, на предприятиях электротехнической и приборостроительной промышленности, преимущественно для автоматизированного производства электроаппаратов и электрических машин малой мощности. Сущность изобретения: гибкое автоматизированное производство (ГАП), содержащее автоматизированную транспортно-накопительную систему (АТНС), (АРМ) и технологическое оборудование, связанное через блоки управления и питания с токоподводами, отличающееся тем, что, с целью расширения технологических возможностей и повышения производительности, оно снабжено дополнительными электродами и пьезокерамическими элементами, расположенными в активаторах и выполненными в виде введенных друг в друга цилиндров со смещенными на угол 0°<α<180° отверстиями, связанными блоком сопряжения и синхронизации с пьезокерамическими элементами и электродами графопостроителя, а через устройство ситуационного управления с автоматизированным центром получения прибыли (АЦПП) и АРМ. 9 ил.
ГИБКОЕ АВТОМАТИЗИРОВАННОЕ ПРОИЗВОДСТВО, содержащее автоматизированные транспортно-накопительные системы, автоматизированные рабочие места и технологическое оборудование, связанное через узлы управления, один из которых выполнен с синхронизатором и блоком сопряжения, и блок питания с токоподводами, автоматизированный центр получения прибыли, отличающееся тем, что оно снабжено пьезокерамическими элементами, расположенными в активаторах, и дополнительными электродами, выполненными в виде введенных друг в друга цилиндров со смещенными на угол 0°<α<180° отверстиями, связанными через блок сопряжения и синхронизатор с пьезокерамическими элементами и электродами графопостроителя, а через устройство ситуационного управления - с автоматизированным центром получения прибыли и автоматизированными рабочими местами.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гибкое автоматизированное производство | 1990 |
|
SU1749325A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
