Изобретение относится к вычислительной технике и автоматике и может быть использовано в системах обработки информации.
Цель изобретения - расширение области применения за счет возможности считывания с цифровых оптических карт.
Особенностью предлагаемого устройства является то, что носитель информации приводится в автоколебательное движение вдоль оси Х, считывание матричной информации производится расположенной вдоль оси Y матрицей фотодетекторов при прохождении информации под линейкой в одном направлении, а при движении носителя в обратном направлении включаются бесконтактные магнитные храповые механизмы, производящие юстировку (совмещение) информационной и считывающей матриц или включаются аналогичные храповые устройства, перемещающие вдоль осей на следующую (произвольную) позицию источник освещения и линейку фотодетекторов. Устройство имеет иерархическую структуру управления. В порядке приоритетности выполняются следующие операции:
автоматическая настройка по оси Y:
автоматическая настройка по оси Х;
автоматическое разрешение на считывание информации;
автоматическое разрешение на выдачу информации;
переход на следующую позицию по сигналам управления (в запрограммированном или произвольном порядке).
Для настройки и выработки автоматических сигналов используются топологическая сетка и контрольные метки на носителе информации.
На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 - взаимодействие храпового механизма с катушкой в аксонометрии; на фиг. 3 - пример реализации устройства; на фиг. 4 - схема топологии для считывания носителя информации - цифровой карты; на фиг. 5 - диаграмма сигналов блока управления.
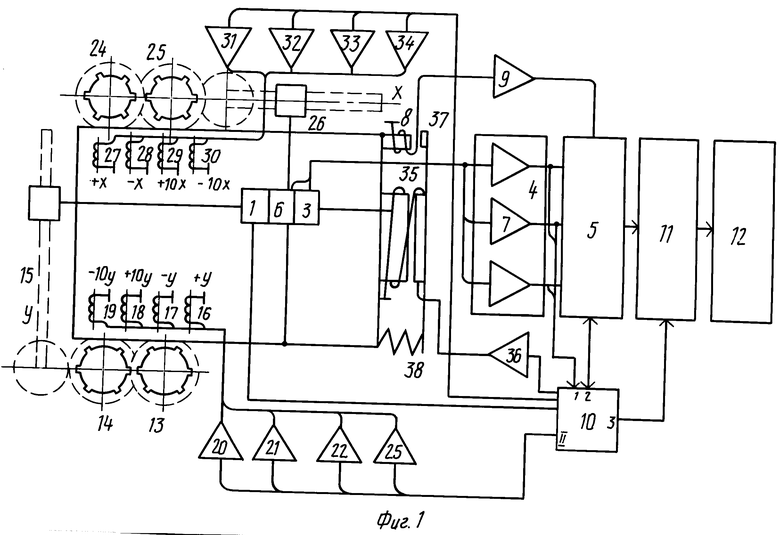
Устройство содержит источник 1 света, носитель 2 информации, линейку 3 фотоприемников, блок усилителей 4, блок 5 адресации, фотоприемник 6 контрольного сигнала, усилитель 7 контрольного сигнала, датчик 8 положения, усилитель 9 положения носителя, блок 10 управления, блок 11 сопряжения, буферный 12 накопитель, точный 13 и грубый 14 магнитные храповые механизмы с редуктором 15 по оси Y, катушки 16 и 17 точного механизма по +Y и -Y, катушки 18 и 19 грубого механизма по +10Y и -10Y, четыре усилителя 20-23 включения указанных катушек по оси Y, точный 24 и грубый 25 магнитные храповые механизмы с редуктором 26 по оси Х, катушки 27 и 28 точного механизма по +Х и -Х, катушки 29 и 30 грубого механизма по +10 Х и -10 Х, четыре усилителя 31-34 включения указанных катушек по оси Х, катушку 35 привода колебаний, усилитель 36 автоколебаний, постоянный магнит датчика 37 положения и возвратную пружину 38 привода автоколебаний.
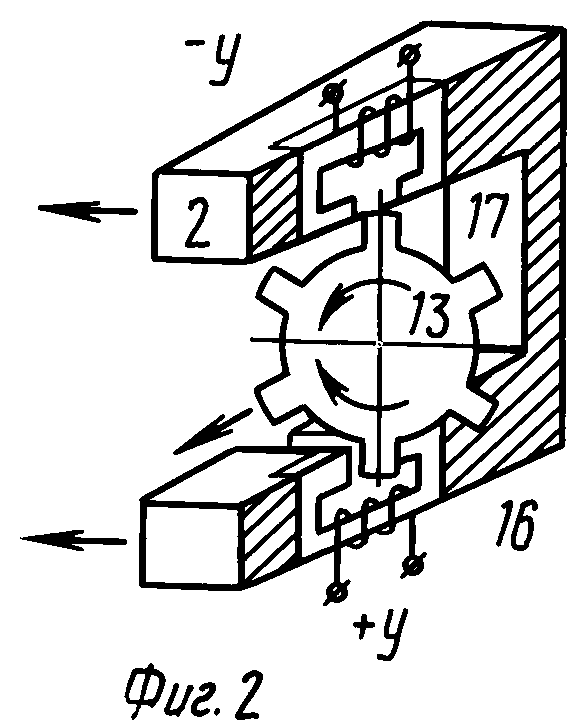
Магнитный храповой механизм 13 (см. фиг. 2) является бесконтактным устройством, работающим аналогично бесконтактному шаговому двигателю. Храповик 13, выполненный из ферромагнитного материала, приводится в движение синхронно с перемещением носителя информации при замыкании через него магнитного потока, индуцируемого в ферромагнитных сердечниках током, протекающим в катушках 16 и 17. Для уменьшения механического проскальзывания храповик 13 имеет зубчатую форму. Реверс движения храповика 13 осуществляется за счет оппозиционного (относительно храповика 13) расположения сердечников с намотанными на них катушками 16, 17 на столе носителя информации (на фиг. 1 и 2 стол и носитель информации обозначены как единое целое - поз.2).
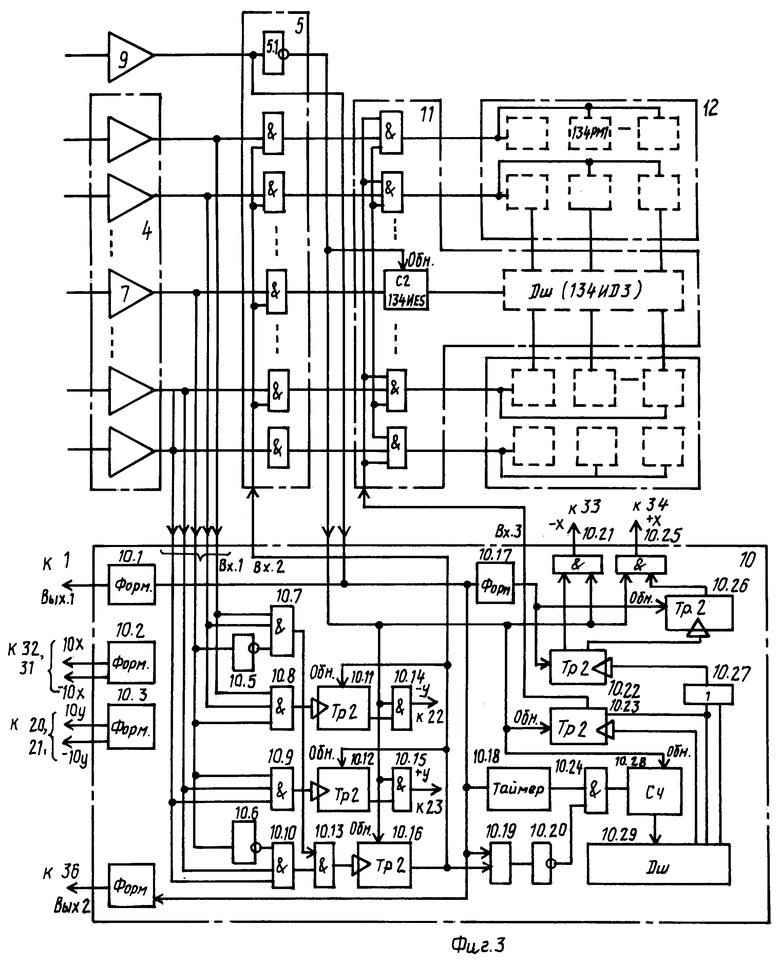
На фиг. 3 обозначены симметричное расположение усилителей 4, например по два относительно усилителя 7 контрольного сигнала, 5.1 инвертор и элементы 5.2-5,6 И блока 5 адресации, элементы 11i И блока 11 сопряжения, расположение схем 12i в накопителе 12, контрольная цепочка контрольного фотоприемника 6:7-5.4-114-124. Блок 10 содержит формирователи 10.1-10.4, инверторы 10.5-10.6, элементы И 10.7-10.10, триггеры 10.11, 10.12, элементы И 10.13-10.15, триггер 10.16, формирователь 10.17, таймер 10.18, элементы И 10.19, инвертор 10.20, элемент И 10.21, триггеры 10.22, 10.23, элементы И 10.24, 10.25, триггеры 10.26, элемент ИЛИ 10.27, счетчик 10.28, дешифратор 10.29.
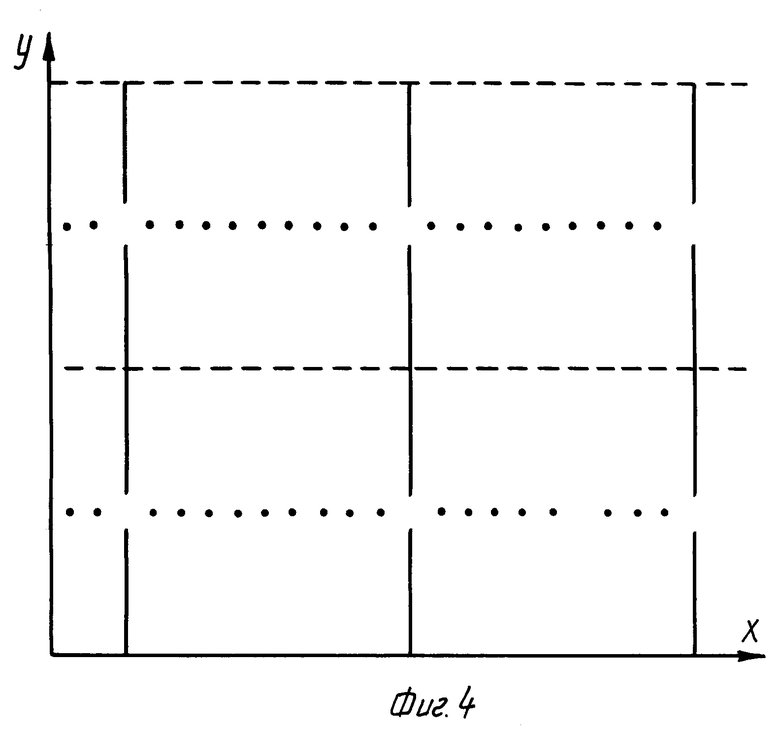
На фиг. 4 представлен участок цифровой карты (изображение самой карты не показано) носителя информации с топологической разметкой, содержащей риски, параллельные оси Y, и контрольные метки по оси Х, которые используются для автоматической настройки и выработки команды рассогласования и управления.
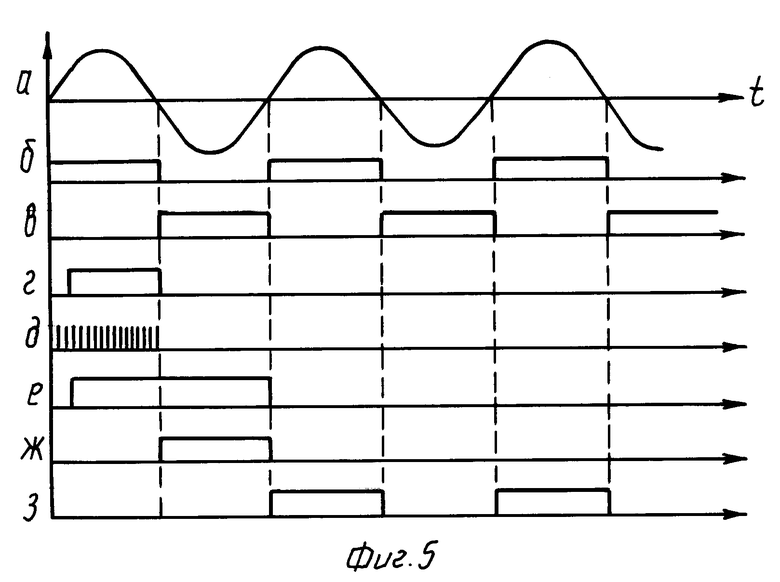
На фиг. 5 представлена диаграмма напряжений в блоке 10, где показаны: а - напряжение на датчике 8; б - напряжение на выходе усилителя 9 (синхронизация цикла считывания); в - напряжение на выходе инвертора 5.1 (синхронизация цикла установок); г - сигнал рассогласования по Х на выходе элемента 10.19; д - сигналы от таймера 10.18 определения рассогласования по оси Х; е - сигналы рассогласования от триггера 10.26 (+Х); ж - сигнал рассогласования на выходе элемента 10.25 (+Х); з - сигнал разрешения считывания при нулевом рассогласовании по Х от триггера 10.23, поступающий на блок 11.
Устройство работает следующим образом.
При поступлении электрического сигнала в источник 1 света, сколлимированное излучение освещает носитель 2 информации. При наличии кода или рисок сигналы от них поступают на оптические входы линейки 3 и фотоприемника контрольного сигнала 6. После усиления в блоке 4 сигналы (фиг. 3) поступают в блок 10 на логические схемы совпадений 10.7-10.10. Если линейка 3 расположена несимметрично (сдвинута по оси Y вверх) относительно разметки, изображенной на фиг. 4, срабатывает схема 10.8, опрокидывает триггер 10.11 и вырабатывается схемой 10.14 (фиг. 5б) сигнал смещения по оси -Y. Смещение отрабатывается во время обратного хода колебаний. Аналогично вырабатывается сигнал при расположении линейки 3 ниже относительно разметки на носителе 2 информации. В этом случае срабатывают схемы 10.9, 10.12, 10, 10.15, вырабатывая сигнал смещения по оси +Y. Этот сигнал усиливается в усилителе 23, при этом в катушке 16 появляется ток, индуцирующий магнитный поток, который замыкается через зубец храповика 13, увлекаемый смещающимся магнитным потоком храповик поворачивается вокруг своей оси по часовой стрелке, приводя в движение редуктор и ходовой винт 15, смещающий считывающую головку (1, 6, 3) вдоль направляющей оси Y.
При отсутствии рассогласования по оси Y относительно разметки 2, изображенной на фиг. 4, срабатывают схемы 10.7, 10.10, 10.13, опрокидывают триггер 10.16, который при этом разрешает прохождение сигналов через блок 5, запрещает смещение по Y. Схемой 10.19 разрешается определение рассогласования по оси Х. Измерение рассогласования по оси Х осуществляет таймер 10.18, работающий во время прямого хода колебаний, с помощью схем 10.19, 10.20, 10.24, осуществляющих вырезку временного интервала, заполненного счетными импульсами от таймера 10.18.
При установке в дешифраторе 10.29 кода "1" запускается триггер 10.23, который выдает разрешение на прохождение сигналов через блок 11 сопряжения, при установке в ДШ 10.29 кода "2" триггер 10.23 срабатывает и прохождение сигналов через блок 11 запрещается, в этом случае запускается триггер 10.22 рассогласования по -Х. При появлении на ДШ 10,20 кода "n" триггер 10.22 срабатывается на "0" и запускает триггер 10.26, вырабатывающий сигнал рассогласования +Х. Схемы 10.21 и 10.25 разрешают прохождение сигнала рассогласования по -Х и +Х только во время обратного хода колебаний (цикл установок).
Выработка сигналов рассогласования -Х и +Х позволяет сократить (располовинить) время отработки по оси Х. При снятии требований о сокращении отработанных циклов достаточно одного канала отработки -Х.
Установка считывающего устройства (1, 6, 3) над произвольным участком носителя информации 2 производится с помощью внешних сигналов, заводимых на формирователь 10.2 ("10Х"-"10Х") и формирователь 10.3 ("10Y"-"10Y").
В датчике 8 индицируется ЭДС от переменного магнитного потока, создаваемого постоянным магнитом 37 при изменении воздушного зазора в автоколебательном режиме, для создания которого использованы катушка 35 (при протекании тока в катушке зазор уменьшается) и возвратная пружина 38, возвращающая стол с цифровой картой 2 в исходное положение при отсутствии тока в катушке 35.
Устройство обеспечивает возможность произвольной выборки информации из большого массива, автоматической коррекции выставки и совмещения информационной и считывающей матриц.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФОТОЭЛЕКТРИЧЕСКОЕ СЧИТЫВАЮЩЕЕ УСТРОЙСТВО | 1989 |
|
RU2030787C1 |
| Устройство для считывания графической информации | 1987 |
|
SU1451742A1 |
| Устройство для считывания и распознавания изображений на карте с электропроводящими элементами | 1983 |
|
SU1124348A1 |
| Устройство для считывания графической информации | 1976 |
|
SU651373A1 |
| СПОСОБ ЗАПИСИ ИЗОБРАЖЕНИЯ НА ПЛОСКУЮ ПОВЕРХНОСТЬ | 1994 |
|
RU2081753C1 |
| Устройство для считывания графической информации | 1982 |
|
SU1084835A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1018136A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1043692A1 |
| УСТРОЙСТВО ДЛЯ ЗАПИСИ И/ИЛИ СЧИТЫВАНИЯ НА/С НОСИТЕЛЯ МАГНИТНО-ОПТИЧЕСКОЙ ИНФОРМАЦИИ | 1990 |
|
RU2068201C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1993 |
|
RU2069012C1 |
Изобретение относится к вычислительной технике и автоматике. Его использование в системах обработки информации позволяет расширить область применения за счет возможности считывания с цифровых оптических карт. В устройстве обеспечивается автоколебательный механизм перемещения носителя информации в грубом и точном режимах по двум взаимно перпендикулярным осям. 5 ил.
ФОТОЭЛЕКТРИЧЕСКОЕ СЧИТЫВАЮЩЕЕ УСТРОЙСТВО, содержащее установленные на каретке оптически связанные источник света и линейку фотоприемников информационных и контрольных сигналов, выходы которых соединены с входами соответствующих усилителей, выходы которых соединены с информационными и синхронизирующим входами блока адресации, блок сопряжения, входы которого соединены соответственно с выходами блока адресации, а выходы - с соответствующими входами буферного накопителя информации, блок управления, синхронизирующий и информационные входы которого соединены соответственно с выходами блока усилителей, первый выход блока управления соединен с источником света, а первый и второй входы-выходы - с управляющими входами-выходами блоков соответственно адресации и сопряжения, блок двухкоординатного перемещения каретки, отличающееся тем, что, с целью расширения области применения за счет возможности считывания с цифровых оптических карт, блок двухкоординатного перемещения каретки содержит грубые и точные магнитно-храповые механизмы перемещения по осям X и Y, механизм автоколебаний, состоящий из механически связанного с кареткой электромагнита, возвратной пружины и постоянного магнита, механически связанного с возвратной пружиной, усилитель автоколебаний и последовательно соединенные датчик положения и усилитель положения, две группы усилителей, входы которых соединены с первой и второй группами выходов блока управления, а выходы - с входами соответствующих магнитно-храповых механизмов перемещения по осям X и Y, выход усилителя положения соединен с управляющим входом блока адресации, вход усилителя автоколебаний соединен с вторым выходом блока управления, а выход - с электромагнитом механизма автоколебаний.
| Фотоэлектрическое считывающее устройство | 1981 |
|
SU1040495A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
