Изобретение относится к автоматике и вычислительной технике и может быть использовано для ввода графической информации в ЭВМ.
Известно устройство для считывания графической информации содержа1цее координатный матричный планшет, содержащий в направлении каждой, двух осей координат,по сёткк последовательно соединенййх кЙордйнатных шин, блоки анализа, управления и определения координат 1.
Недостатки этого устройства заключаются в конструктивной сложности сланшета и схемы обработки считанной информации, а также в том, что устрой ство не позволяет считывать координаты точек в абсолютной системе координат.
Наиболее близким к предлагаемому является устройство для считывания графической информации, содержащее планшет с системами взаимно ортогональных координатных шин тго две сетки, шин на каждую координатную ось, напг равлянвдую, жестко связанную с планшетом устройства, траверсу, механически связанную с направлягадей, съемник координат, кинематически связанный с траверсой и содержащий линзу с визирным перекрестием и катушку индуктивности, блок управления, векторные сумматоры, входы которых подключены к выходам систем координатных шин, а выходы - к входам амплитудных дискриминаторов, выходыкоторых соединены с входами блоков формирования кодов координат, генератор импульсов, дели тель частоты и формирователь синусоидального сигнала, выход.которого.соединен с катушкой индуктивности съемника координат 2.
Недостаток известного устройства состоит в его сложности, обусловленной необходимостью иметь в планшете на каждую координатупо две группы систем координатных шин, а также векторные сумматоры в составе его электронных блоков и узлов.
Целью изобретения является упрощение устройства.
Указанная цель достигается тем, что в устройстве для считывания, графической информации, содержащем планшет с системами взаимно ортогональных координатных шин.,направляющую,жестко связанную с планшетом, траверсу, кинематически связанную с направляющей и корпусом съемника информации, содержащего линзу с визирным перекрестием и катушку индуктивности, ось которой расположена ортогонально поверхности планшета., подключенную к выхсдау формирователя синусоидального сигнала,, амплитудные дискриминаторы, выходы которых соединены с одними из входов блоков формирования координат, другие входы которых подключены к разрядным выходам делителя частоты,, один из выходов которого соединен с входом формирователя синусоидального сигнала, а вход - с выходом генератора импульсов,.съемник координат содержит две дополнительные катушки индуктивности, оси которых расположены ортогонально друг flpyry и параллельно соответствующим координатным оаям планшета,причем геометрические центры всех катушек индуктивности съемника координат совмещены, входы дополнительных катушек индуктивности соединены с дополнительным выходом формирователя синусоидального сигнала., а выходы систем ортогональных координатных шин планшета подключены к входам соответствующих амплитудных дискриминаторов.
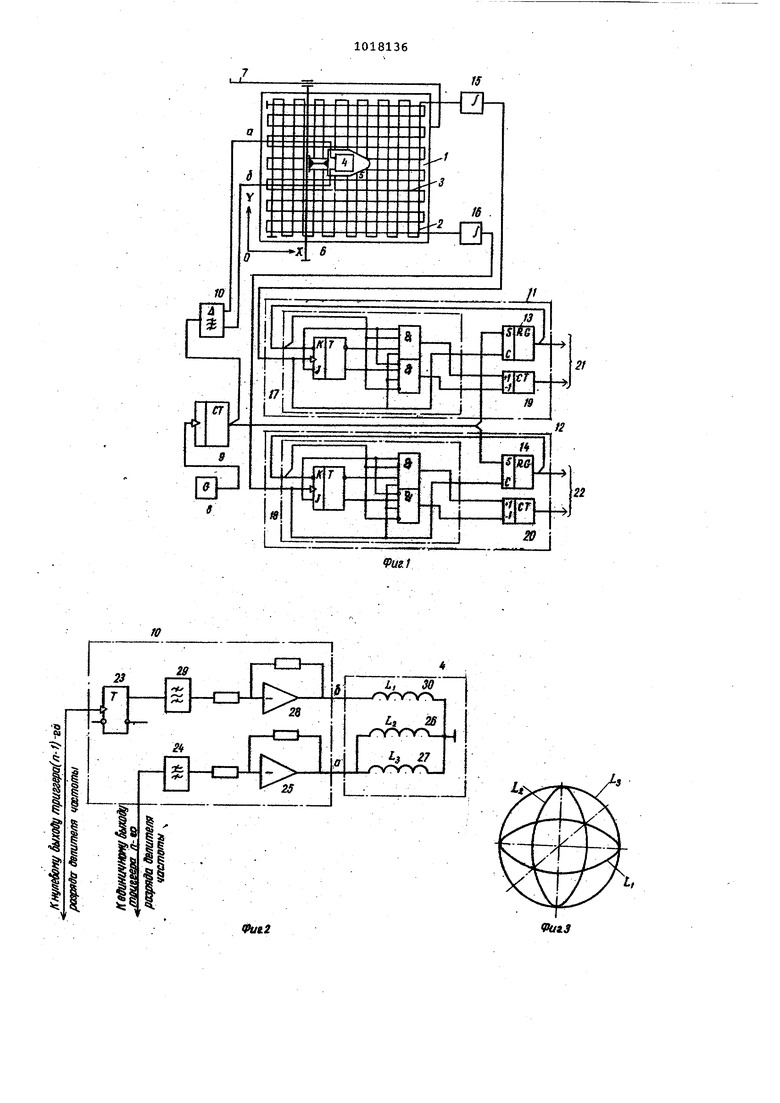
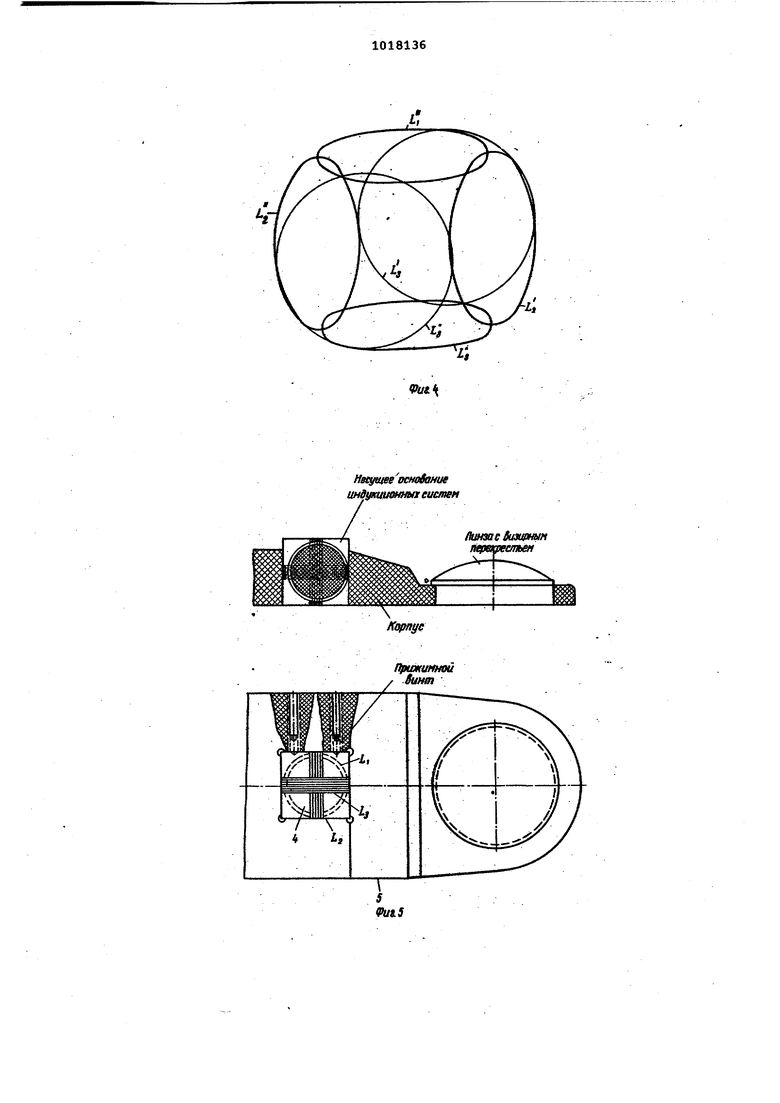
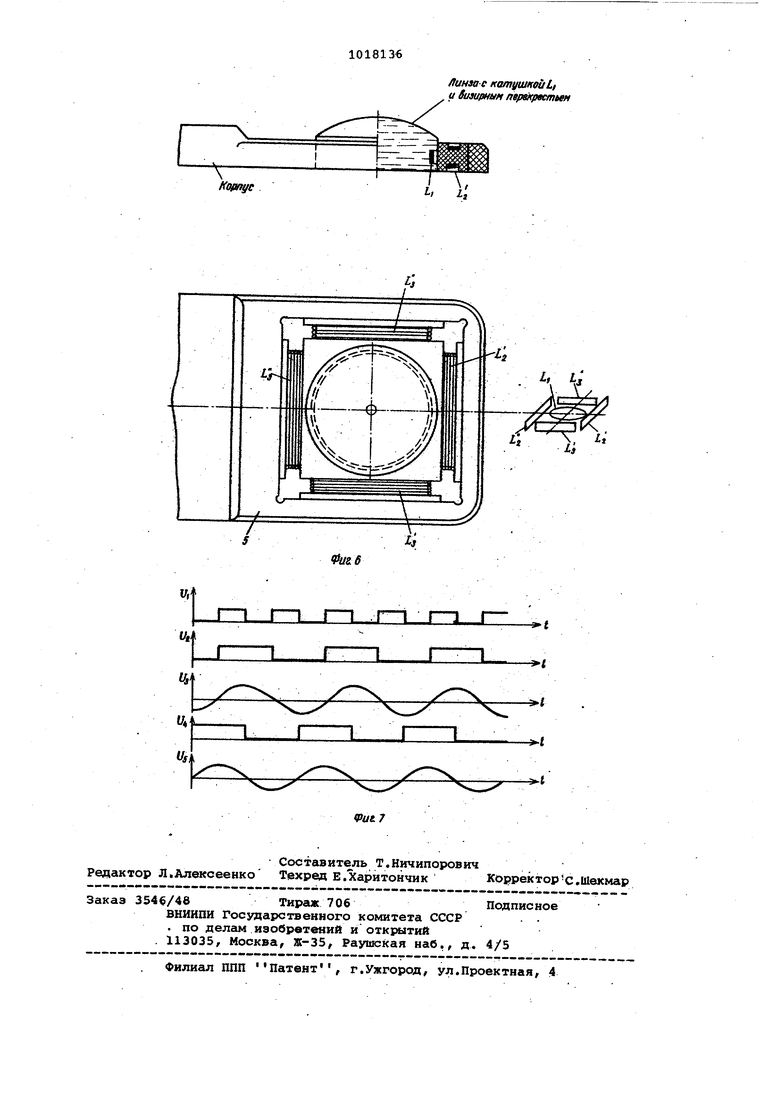
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - схема формирователя синусоидального сигнала; на фиг. 3 и 4 - взаимное расположение катушек индуктивности съемника координат; на фиг. 5 н 6 - различные варианты конструкции съемника координат; на фиг. 7 - временная диаграмма сигналов устройства.
Устройство (фиг. 1) содержит координатный матричный планшет 1 с системами 2 и 3 взаимно ортогональных прямолинейнь1х последовательно соединенных координатных шин, блок 4 катушек индуктивности съемника 5 координат, кинематически связанного с траверсой 6, кинематически связанной с направляющей 7, жестко закрепленной на координатном планшете 1, генератор 8 импульсов, выход которого подключен к счетному входу делителя 9 частоты, выход одного или двух старязих разрядов которого соединен с входом формирователя 10 синусоидального сигнала, выход синусоидального сигнала и дополнительный выход квадратурного {косинусоидального) сигнала которого подключены к клеммам « и S , к дополнительна введенньш катушкам индуктивности съемника 5 координат, блоки 11 тл 12 формирования кодов координат х(у), содержащие регистр 13(14) для измерения сдвига фазы, входом поразрядно связанный с другим выходом делителя 9 частоты, установочным входом - с выходом первого (второго) амплитудного дискриминатора 15(16), вход которого подключен к выходу системы 2(3) координатных шин, и с первым входом узла 17 (18) управления, второй вход которого подключен к выходам двух старших разрядов 1-3(14), а выходы управляющих сигналов - ,к суммирующему и вьгаитёиощему входам реверсивного счетчика 19 (20) числа периодов.,:,
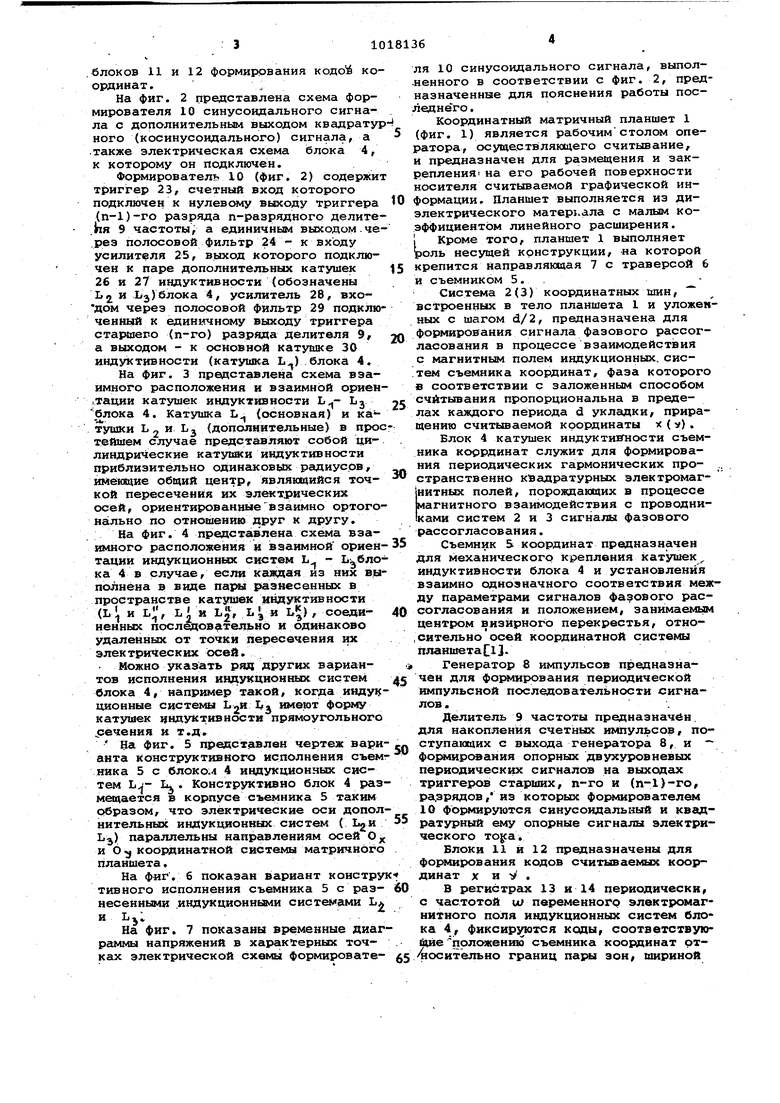
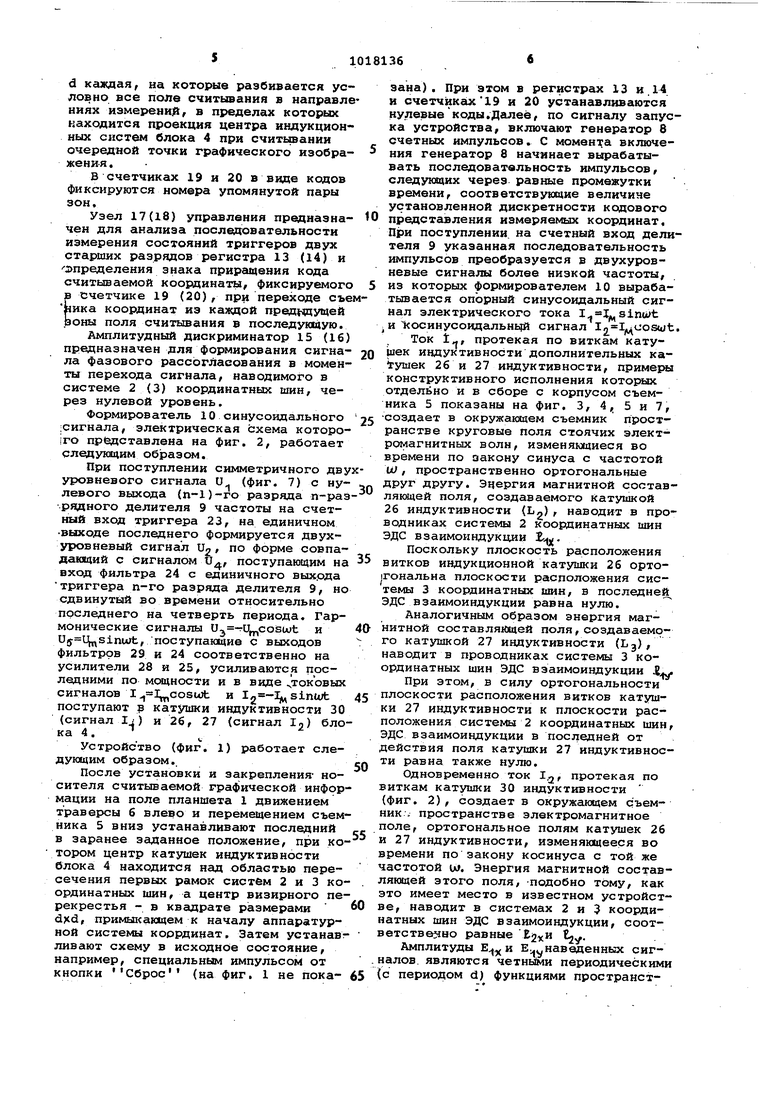
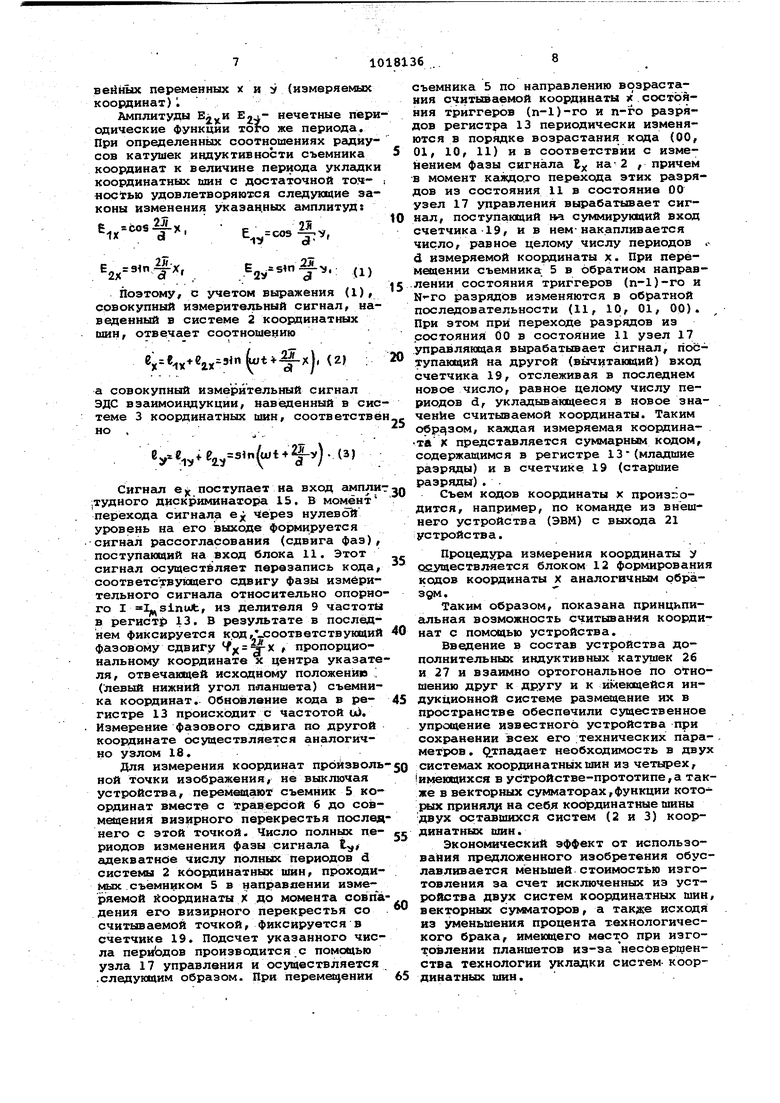
Цифрами 21 и 22 обозначены выходы кодов считываемых координат х и У .блоков 11 и 12 формирования кодоё координат., На фиг. 2 представлена схема формирователя 10 синусоидального сигнала с дополнительным выходом квадратур ного (косинусоидального) сигнала, а также электрическая схема Ьлока 4, к которому он подключен. Формирователь IО (фиг. 2) содержит триггер 23, счетный вход которого подключен к нулеветну выходу триггера Хп-1)-го разряда п-разрядного делите.пя 9 частоты, а единичным выходом-че .рез полосовой фильтр 24 - к входу усилителя 25, выход которого подключен к паре дополнительных катушек 26 и 27 индуктивности (обозначены Ь и Ьз)блока 4, усилитель 28, входом через полосовой фильтр 29 подклю ченшз1й к единичному выходу триггера ста1«оег-о (п-го) разряда делителя 9, а выходом - к основной катушке 30 индуктивности (катушка L) блока 4, На фиг. 3 представлена схема взаимного расположения и взаимной ориен .тации катушек индуктивности Lj блока 4. Катупжа 1. (основная) и катушки Lj и Lj (дополнительные) в прос тейшем случае представляют собой цилиндрические индуктивности приблизительно одинаковых радиусов, имеющие обций центр, являвшийся точ кой пе ресечения их электрических осей, ориентированные взаимно ортогонально по отношению друг к другу. На фиг. 4 представлена схема взаимного расположения и взаимной ориентации индукционных систем L - Ь блока 4 в случае, если каждая из них выполнена в виде napKt разнесенных в пространстве катушек индуктивности (L и Ц , L и Ц, Ь и Ц), соединенных последовательно и одинаково удаленных от точки пересечения их электрических осей. Можно указать ряд других вариантов исполнения имдукционшш cиqтe 4 блока 4, например такой, когда дионные системы 1 имеют форму катушек индуктивности прямоугольного 5 ечения и т.д. На фиг. 5 представлен чертеж вари анта конструктивного исполнения съем ника 5 с блоком 4 индукционных систем Lj . Конструктивно блок 4 раз м цается в корпусе съгаУ1ника 5 таким образом, что электрические оси допол нительных индукционных систем ( 112И Ь) параллельны напргшлениям осей О и 6 координатной систе1«а11 матричного планшета. На фиг. 6 показан вариант констру тивного исполнения съемника 5 с разнесенными индукционньоли системами Ьл и. Ljl . . На фиг. 7 показаны временные диаг раммы напряжений в характерных точках электрической схемы формирователя 10 синусоидального сигнала, выпол-ненного в соответствии с фиг. 2, предназначенные для пояснения работы последнего. Координатный матричный планшет 1 (фиг. 1) является рабочим столом оператора, осуществляющего считывание, и предназначен для размещения и закрепления на его рабочей поверхности носителя считываемой графической информации. Планшет выполняется из диэлектрического MaTepi ana с малым коэффициентом линейного расширения. 1 Кроме того, планшет 1 выполняет роль несущей конструкции, «а которой крепится направляющая 7 с траверсой 6 и съемником 5. Система 2(3) координатных шин, встроенных в тело планшета 1 и уложенных с шагом d/2, предназначена для формирования сигнала фазового рассогласования в процессе взаимодейст аия с магнитным полем индукционных, систем съемника координат, фаза которого в соответствии с заложенным способом сч1 ьгаания пропорциональна в пределах каждого периода d укладки, приращению считываемой координаты х(v). Блок 4 катушек индуктивности съемника коррдинат служит для формирования периодических гармонических про- .. стране ТВ енно к:вадратурных электромаг1нитных полей, порождающих в процессе магнитного взаимодействия с проводни ками систем 2 и 3 сигналы фазового рассогласования. Съемник S координат предназначен для механического крепления катушек индуктивности блока 4 и установления взаимно одноэначного соответствия между параметрами сигналов фазового рассогласования и положением, занимаемым центром визирного перекрестья, отио,сительно осей координатной системы пяаишета 1}. Генератор 8 импульсов предназначен для фо{ шрования периодической импульсной последовательности сигналов . . Делитель 9 частоты предназначен, для накопления счетных интульсов, поступающих с выхода генератора 8, и формирования опорных двухуровневых периодических сигналов на выходах триггеров старших, п-го и (, ра.зрядов, из которых формирсшателем 10 формируются синусоидальный и квадратурный ему опорные сигналы электрического . Блоки 11 и 12 пре дназиачены для формирования кодов считываемых координат X и V . В регистрах 13 и 14 периодически, с частотой и переменного электромагнитного поля индукционных систем блока 4, фиксируется коды, соответствуюйше прложеншо съемника коорпинат относительно границ пары зон, ширииой d каждая, на которые разбивается условно все поле считывания в направле ииях иэмерени, в пределах которых находится проекция центра индукционных систем блока 4 при считьшании очередной точки графического изображения. В счетчиках 19 и 20 в виде кодов фиксируются номера упомянутой пары зон. Узел 17(18} управления предиазначен для анализа последовательности измерения состояний триггеров двух старших разрядов регистра 13 (14) и определения знака приращения кода считываемой координаты фиксируемого в Счетчике 19 (20), при переходе съе Ьика координат из казедой предкцушей Ьоны поля считывания в последукхдую. Амплитудный дискриминатор 15 (16) предназначен для формирования сигнала фазового рассогласования в моменты перехода сигнала, наводимого в системе 2(3) координатных шин, через нулевой уровень. Формирователь 10 синусоидального :сигнала, электрическая схема которо|го представлена на фиг. 2, работает следующим об1разом. При поступлении симметричного дву уровневого сигнала 0 (фиг. 7) с нулевого выхода (n-l)-ro разряда п-раз рядного делителя 9 частоты на счетный вход триггера 23, на единичном выходе последнего формируется двухуровневый сигнал U2, по форме совпадающий с сигналом и, поступающим на вход фильтра 24 с единичного выхода триггера п-го разряда делителя 9, но сдвинутый во времени относительно последнего на четверть периода. Гармонические сигналы иj -rU cosu;t и и5 Ц„з1пиЛ, поступающие с выходов фильтров 29 и 24 соответственно на усилители 28 и 25, усиливаются последними по мощности и в виде токовых сигналов )t и Ige-J sinmt поступают в катушки индуктивности 30 (сигнал Ij) и 26, 27 (сигнал 1,) бло ка 4 . Устройство (фиг. 1) работает следующим образом. После установки и закрепления- носителя считываемой графической инфор мации на поле планшета 1 движением траверсы б влево и перемещением съем ника 5 вниз устанавливают последний в заранее заданное положение, при ко тором центр катушек индуктивности блока 4 находится над областью пересечения первых рамок систем 2 и 3 ко ординатных шин, а центр визирного пе рекрестья - в квадрате размерами dxd, примыкающем к началу аппаратурной системы координат. Затем устанав ливают схему в исходное состояние, например, специальным импульсом от кнопки Сброс (на фиг. 1 не показана). При этом в регистрах 13 и. 14 и счетчиках19 и 20 устанавливаются нулевыекоды.Далее, по сигналу запуска устройства, включают генератор 8 счетных импульсов. С момента включения генератор 8 начинает вырабатывать последовательность импульсов, следукяцих через равные промежутки времени, соответствующие величине установленной дискретности кодового представления измеряегвлх координат. При поступлении, на счетный вход делителя 9 указанная последовательность импульсов преобразуется в двухуровневые сигналы более низкой частоты, из которых формирователем 10 вырабатывается опорный синусоидальный сигнал электрического тока I J sinwt и Т осинусоидальный сигнал (v -:oswt. Ток 1-, протекая по виткам катушек индуктивности дополнительных кадушек 26 и 27 индуктивности, применил конструктивного исполнения которых отдельно и в сборе с корпусом съемника 5 показаны на фиг, 3, 4, 5 и 7, создает в окружающем съемник пространстве круговые поля стоячих электромагнитных волн, изменяющиеся во времени по закону синуса с частотой Ш, пространственно ортогональные друг другу. Энергия магнитной составлякяцей поля, создаваемого Катушкой 26 индуктивности (Lg)f наводит в проводниках системы 2 координатных шин ЭДС взаимоиндукции I-. Поскольку плоскость расположения витков индукционной катушки 26 орто1Гональна плоскости расположения системы 3 координатных шин, в последней ЭДС взаимоиндукции равна нулю. Аналогичным образом энергия магнитной составляйщей поля,создаваемого катушкой 27 индуктивности (Lj), наводит в проводниках системы 3 координатных шин ЭДС взаимоиндукции При этом, в СИЛУ ортогональности плоскости расположения витков катушки 27 индуктивности к плоскости расположения системы 2 координатных шин, ЭДС взаимоиндукции в последней от действия поля катушки 27 индуктивности равна также нулю. Одновременно ток I.j, протекая по виткам катушки 30 индуктивности (фиг. 2), создает в окружающем съемник, пространстве электромагнитное поле, ортогональное полям катушек 26 и 27 индуктивности, изменяющееся во времени по закону косинуса с той же частотой W. Энергия магнитной составляквдей этого поля, подобно тому, как это имеет место в известном устройстве, наводит в системах 2 и 3 координатных шин ЭДС взаимоиндукции, соответствезно равные EjxH tj Амплитуды Е и E.J4,наведенных сигналов являются четньми периодическими {с периодом d) функциями пространствейных переменных х и у (измеряемых координат) . Амплитуды 2 нечетные пери олические функции того же периода. При определенных соотношениях радиусов катушек индуктивности съемника координат к величине периода укладки координатных шин с достаточной точ- «остью удовлетворяются следующие законы изменения указанных амплитуд: . Р„ с,, 2v fПоэтому, с учетом выражения (I), совокупный измерительный сигнал, наведенный в системе 2 координатных шин, отвечает соотношению ), (Z) Х «IX а совокупный измерительный сигнал ЭДС в э аимоинд ук ции, нав еденный в сис теме 3 координатных шин, соответстве но , ,) Сигнал ejt поступает на вход ампли .тудного дискриминатора 15. В моьаднт перехода сигнала ej( через нулевой уровень на его выходе формируется сигнал рассогласования (сдвига фаз), поступающий на вход блока 11. Этот сигнал осуществляет перезапись кода, соответс-гвующего сдвигу фазы измерительного сигнсша относительно опорно го I 1 з1пЫЬ, из делителя 9 частота в регистр) 13. В результате в последнем фиксируется к.од,-соответствующий фазовому сдвигу f- пропорциональному координате х центра указате ля, отвечающей исходному положение . (левый нижний угол планшета) съемника координат. Обновление кода в регистре 13 происходит с частотой и. Измерение фазового сдвига по другой координате осуществляется аналогично узлом 18. Для измерения координат пройзволь ной точки изображения, не выключая устройства, перемещают съемник 5 координат вместе с траверсой 6 до совмещения визирного перекрестья послед него с этой точкой. Число полных периодов изменения фазы сигнала t, адекватное числу полных периодов d системы 2 координатных шин, проходиKOdx съёмником 5 в направлении измеряемой Координаты X до момента совпа дения его визирного перекрестья со считываемой точкой, фиксируется в счетчике 19. Подсчет указанного числа периЬдов производится с помацью узла 17 управления и осуществляется .следующим образом. При перем ении съемника 5 по направлению возрастания считываемой координаты х состояния триггеров (n-l)-ro и п-го разрядов регистра 13 периодически изменяются в порядке возрастания кода (00, 01, 10, 11) ив соответствии с изменением фазы сигнала Еу на2 , причем в момент каждого перехода этих разрядов из состояния 11 в состояние 00 узел 17 управления вырабатывает сигнал, поступающий л суммирующий вход счетчика 19, и в нем-накапливается число, равное целому числу периодов d измеряемой координаты х При перёмоцении съемника; 5 в обратном направлении состояния триггеров (n-l)-ro и N-ro разрядов изменяются в обратной последовательности (И Ю, 01, 00). При этом при переходе разрядов из состояния 00 в состояние 11 узел 17 управляющая вырабатывает сигнал, поступающий на другой (вычитающий) вход счетчика 19, отслеживая в последнем новое число, равное целому числу периодов df укладывающееся в новое значение считываемой координаты. Таким образом, каждая измеряемая координата X предстёшляется суммарным кодом, содержащимся в регистре 13(младшие разряды) и в счетчике 19 (старшие разряды) . Съем кодов координаты х произгодится, например, по команде из внЪшнего устройства (ЭВМ) с выхода 21 устройства. Процедура измерения координаты у Осуществляется блоком 12 формирования кедов координаты X аналогичным рбраздм. Таким образом, показана принцьпи ильная возможность считывания координат с помощью устройства. Введение в состав устройства дополнительных индуктивных катушек 26 и 27 и взаимно ортогональное по отношению друг к другу и к имеющейся индукционной системе разм цение их в пространстве обеспечили существенное упрощение известного устройства при сохранении всех его технических пара- , метров. Отпадает необходимость в двух системах коорда1натныхшин из четырех, имеющихся в устройстве-прототипе,а также в векторных сумматорах, функции которых принял|1 на себя координатные шины двух оставшихся систем (2 и 3) координатных шин. Экономический эффект от использования предложенного изобретения обуславливается меньшей стоимостью изготовления за счет исключенных из устройства двух систем координатных шин, векториык сумматоров, а также исходя из уменьшения процеита технологического брака, имеющего место при изготовлении планшетов из-за несовершенства технологии укладки систем- координатных шин.
1 Д
И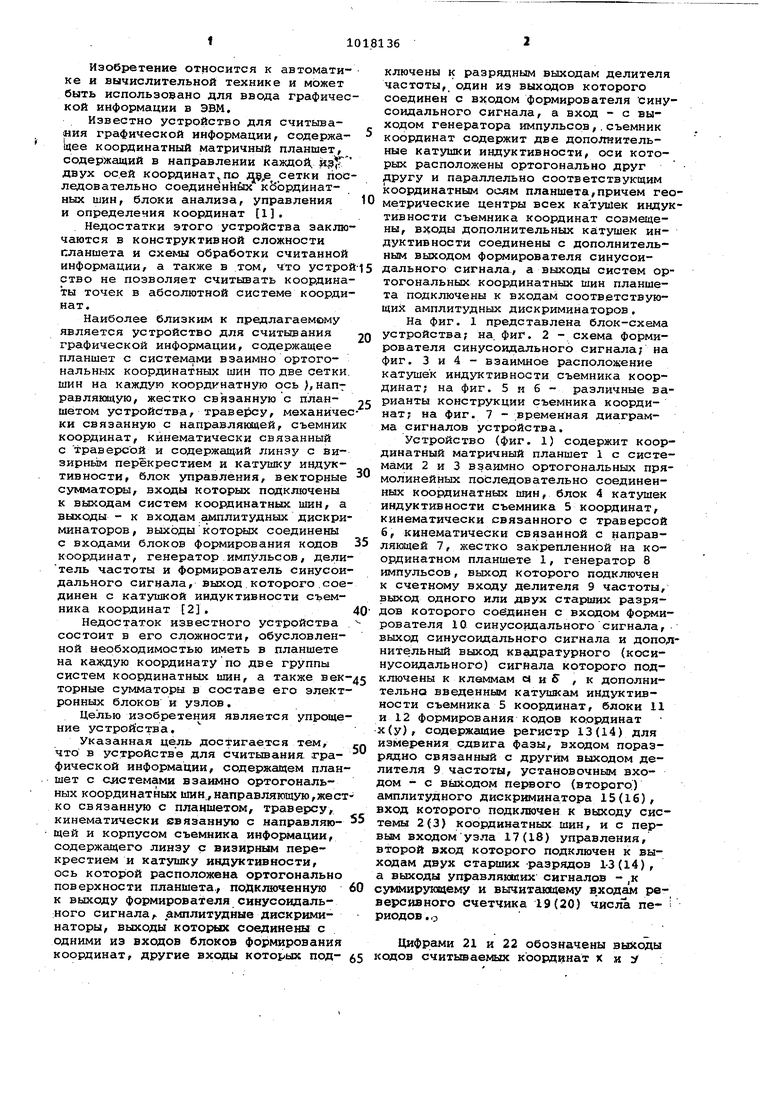
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания графической информации | 1982 |
|
SU1080163A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1991 |
|
RU2015566C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1993 |
|
RU2069012C1 |
| Устройство для считывания графической информации | 1982 |
|
SU1043692A1 |
| Способ считывания графической информации и устройство для его осуществления | 1977 |
|
SU714435A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1038956A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1451742A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1681316A1 |
| Устройство для считывания графической информации | 1981 |
|
SU953643A2 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ, ИНФОРМАЦИИ | 1979 |
|
SU826376A1 |
-УётРОЙСТВО ДЛЯ СЧИ-ШВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ, содержащее планшет с системами взаимно ортогональных координатных шин, направляющую, жестко связанную с планшетом, tpaaepcy, кинематически связанную с направляющей и корпусом съемника информации, содержащего линзу с визирHbD4 перекрестием и катушку индуктивности, ось которой расположена ортогонально поверхности планшета, подключенную к выходу формирователя синуеоидального сигнала, амплитудные 11искриминаторы, выходы которых соединены с одними из входов блоков фо1ялирования координат, другие ходы которых подключены к разрядным выходам делютеля частоты , из выходов которого соединен с входом формирователя синусоидального сигнала, a вхсуч с .выходом генератора нглпульсов, о тл и ч a К) щ е е с я тем, что, с целью упрощения устройства, в нем съемник кор|щинат содержит две дополнительные индуктивности, оси которых расположены ортогонально друг другу фУгу g и параллельно соответствующим коорди ;оордим юмет- Vf натным планшета, причем геометюное- С, ийеские центры катушек индуктивносI, Bxo-te ти съемника координат совмацены ;тивнос1 ды дополнительных катушек индуктивн соединены с дополнительным выходом формирователя синусоидального сигнала, a выходы систем ортогональных координатных шин планшета подключены к входам соответствующих амплитудных дискриминаторов. СХ) оо а
ГР
J
ffl
/7
,i
в
р/
ж
fr
1
Г
LE
чЖ
/
L
1
22
S}
Фий.2
.З
Hi u eocm Hue OHdiflaiuefaaa еиаяем
Лтзае luiupmiH
Прижшплй у Swm
и, (4 f4
«Д s
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США 3801733, кл; 340, 35-38, опублик | |||
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
