Изобретение относится к укупорочной технике и может быть использовано для закупорки емкостей герметичными колпачками.
Известно укупоривающее устройство, содержащее индуктор для обжима колпачков на сосудах, механизм разделения и фиксации последних под индуктором, привод, блок управления, импульсный блок и разрядник [1].
Недостатком известного устройства является сложность конструкции.
Цель изобретения - упростить конструкцию устройства и повысить его надежность в работе.
Это достигается за счет того, что известное устройство снабжено датчиками положения укупориваемого сосуда и крайних положений индуктора и фиксатором, при этом индуктор механически соединен с приводом и датчиками крайних положений, механизм разделения и фиксации сосудов механически соединен с датчиками положения сосудов с фиксатором, блок управления электрически соединен с приводом, датчиком положения сосудов и крайних положений индуктора, фиксатором и разрядником. Устройство может быть также снабжено дополнительными индукторами для обжима колпачков на сосудах, связанными механически с приводом и расположенными над рядом укупориваемых сосудов, механизм разделения и фиксации сосудов свободно установлен на оси вращения для привода укупориваемых сосудов и соединен с фиксатором для исключения перемещения его при движении индуктора, при этом последний смонтирован с возможностью перемещений в направлении, перпендикулярном к направлению перемещения укупориваемых сосудов.
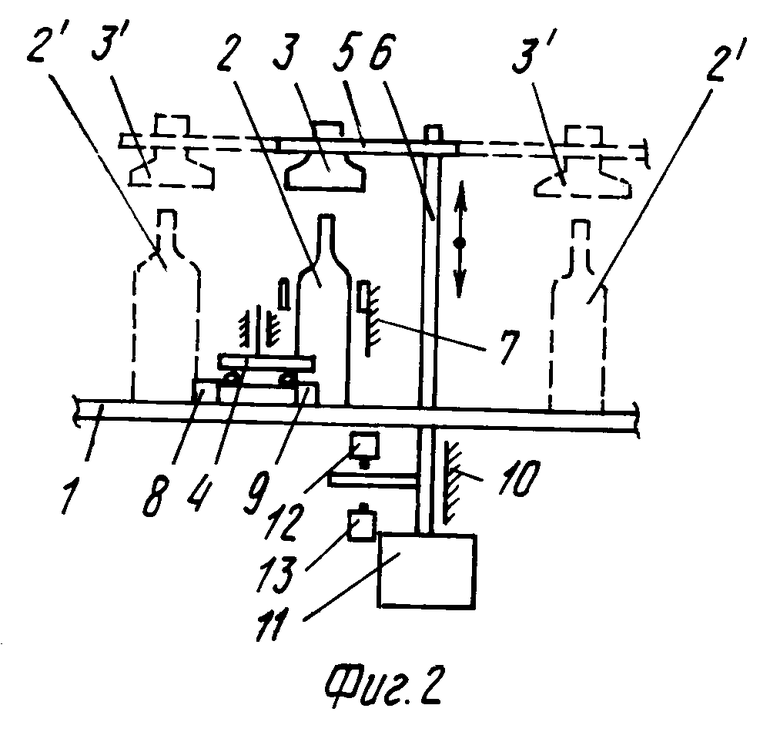
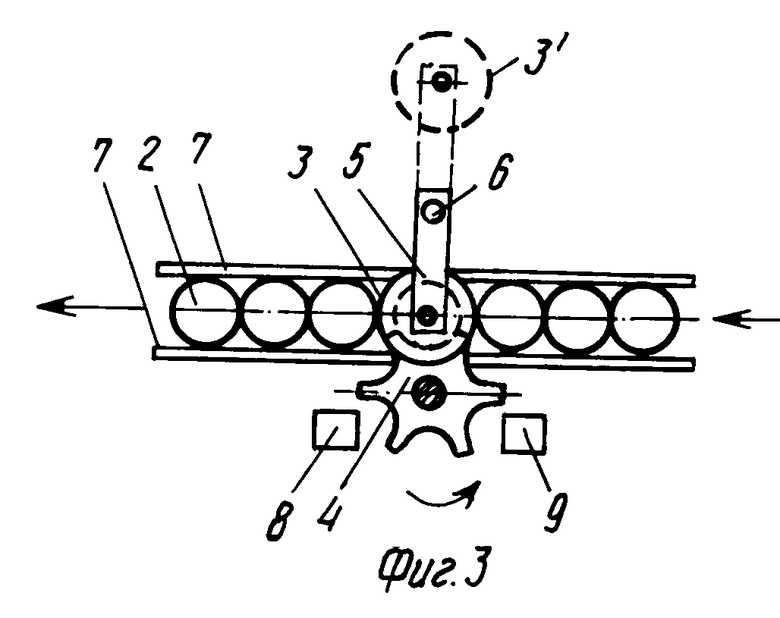
На фиг. 1 изображено предлагаемое устройство, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, план.
Укупоривающее устройство содержит рабочую поверхность (стол) 1, по которой поступательно перемещаются сосуды 2, проходя под укупоривающим индуктором 3. В общем случае устройство может содержать несколько рядов сосудов 2' и индукторов 3', сообщенных между собой; здесь они показаны пунктиром. В рабочем положении под индуктором 3 сосуды 3 отделяются один от другого дистанционирующим устройством 4 (например, в виде звездочки). Индуктор 3 размещен на траверсе 5, установленной на подвижном штоке 6. Сосуды 2 перемещаются между направляющими 7, и в рабочей позиции (под индуктором 3) устройство 4 фиксируется фиксатором 8 и датчиком положения 9. Шток 6 перемещается в направляющих 10 блоком привода 11, а крайние (по вертикали) положения штока 6 отмечаются датчиками положения 12 (верхним) и 13 (нижним). Блок управления 14 связан с импульсным блоком 15 и разрядником 16, а последний - с индуктором 3.
Устройство работает следующим образом.
Укупориваемые сосуды 2 перемещаются по столу 1 внешней силой (вручную, транспортером, шнеком) между направляющими 7. При своем поступательном движении сосуды 2 приводят во вращение дистанционирующее устройство 4 (например, звездочку) и в рабочем положении (под индуктором 5) отделяются один от другого с заданным интервалом. В рабочей позиции вращение устройства 4 вызывает срабатывание датчика положения 9, сигнал от которого поступает в блок управления 14. Блок 14 вырабатывает сигнал на фиксатор 8, который блокирует вращение устройства 4 и фиксирует положение сосуда 2 под индуктором 3 в рабочей позиции. Одновременно блок 14 подает управляющий сигнал приводу 11 (электрическому, пневматическому или гидравлическому), который перемещает вниз шток 6 и связанные с ним траверсу 5 и индуктор 3. Последний опускается на горлышко сосуда 2 с надетым на него колпачком. Одновременно с достижением нижнего положения штока 6 датчик нижнего положения 13 выдает сигнал блоку 14, который воздействует на импульсный блок 15 и разрядник 16. Последний коммутирует электрическую энергию блока 15 с индуктором 3 и происходит разряд энергии на индукторе 3, что вызывает укупоривание сосуда, находящегося под индуктором. Далее блок 14 вырабатывает сигнал приводу 11, и шток 6 с траверсой 5 и индуктором 3 перемещается вверх. В крайнем верхнем положении кронштейн штока 6 воздействует на датчик положения 12, сигнал от которого поступает в блок 14, после чего последний выдает сигнал фиксатору 8, освобождая устройство 4. Под действием внешней силы очередной сосуд 2 (следующий после уже укупоренного) перемещает сосуд, находившийся в рабочей позиции, и сам занимает его место. При этом снова срабатывает датчик положения 9 и весь цикл работы устройства повторяется.
При наличии нескольких рядов сосудов 2 и соответственно нескольких индукторов 3 (показанных пунктирами) их срабатывание производится аналогично описанному и за один цикл работы устройства укупориваются несколько сосудов одновременно. Периодичность срабатывания устройства определяется темпом перемещения сосудов 2 внешней силой, т.е. может изменяться в широких пределах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УКУПОРИВАНИЯ | 1992 |
|
RU2031082C1 |
| ФАСОВОЧНЫЙ АВТОМАТ | 1995 |
|
RU2098346C1 |
| ПОРЦИОННЫЙ ДОЗАТОР ЖИДКОСТИ | 1994 |
|
RU2054631C1 |
| ОБЪЕМНЫЙ ДОЗАТОР ЖИДКОСТИ | 2005 |
|
RU2290611C2 |
| СПОСОБ НАКЛЕИВАНИЯ ЭТИКЕТОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2301765C2 |
| УКУПОРОЧНОЕ УСТРОЙСТВО | 2009 |
|
RU2407696C1 |
| ТЕПЛООБМЕННИК | 1992 |
|
RU2036407C1 |
| Дозатор жидкости | 1989 |
|
SU1781549A1 |
| ДОЗАТОР ЖИДКОСТИ ПО УРОВНЮ | 2005 |
|
RU2295490C2 |
| УСТРОЙСТВО ДЛЯ ОБЖИМА МЕТАЛЛИЧЕСКИХ КОЛПАЧКОВ | 1998 |
|
RU2148552C1 |
Использование: в линиях по розливу жидкостей, например в укупоривающих устройствах. Сущность изобретения: сосуды 2 перемещаются по столу 1 между направляющими 7. Механизм разделения и фиксации сосудов вызывает срабатывание датчика положения 9, сигнал от которого поступает в блок управления 14, при этом последний подает сигнал на фиксатор 8, который блокирует вращение механизма 4 разделения и фиксации сосудов. Одновременно блок 14 подает сигнал приводу 11, который перемещает вниз шток 6 и связанные с ним траверсу 5 и индуктор 3, при этом последний опускается на горлышко сосуда с надетым колпачком и по сигналу датчика 13 нижнего положения через блок 14 воздействует на импульсный блок 15 и разрядник 16. 3 з.п. ф-лы, 3 ил.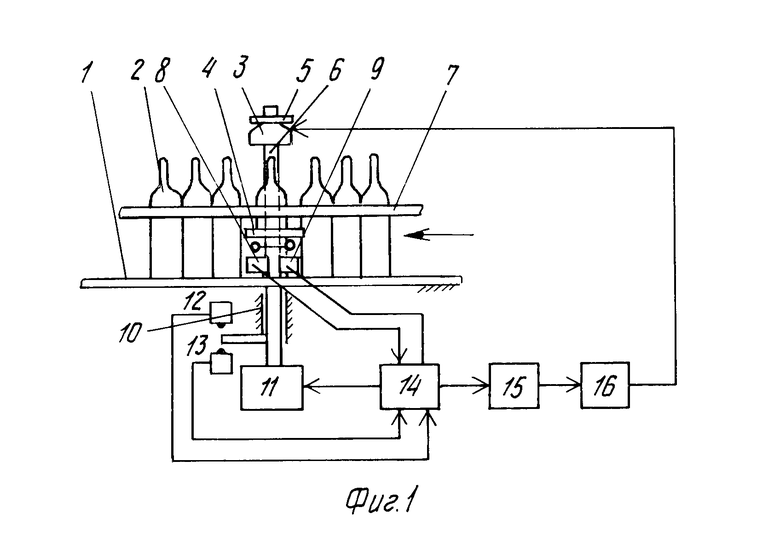
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для УКУПОРКИ БУТБ1ЛОК КРОНЕН-КОРКОВЫМИ КОЛПАЧКАМИ | 0 |
|
SU334173A1 |
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
